三電機卷繞系統的狀態反饋魯棒控制
——LMI方法
2016-07-14 05:32:46侯海良年曉紅彭智王忠
電機與控制學報 2016年7期
侯海良, 年曉紅, 彭智, 王忠
(1.中南大學 信息科學與工程學院,湖南 長沙 410004; 2.湖南人文科技學院 信息學院,湖南 婁底 417000)
?
三電機卷繞系統的狀態反饋魯棒控制
——LMI方法
侯海良1,2,年曉紅1,彭智1,王忠1
(1.中南大學 信息科學與工程學院,湖南 長沙 410004; 2.湖南人文科技學院 信息學院,湖南 婁底 417000)
摘要:針對具有強耦合、不確定性和非線性的三電機卷繞系統,提出一種基于線性矩陣不等式(linear matrix inequality,LMI)的全局魯棒控制方法。首先,在三電機卷繞系統的數學模型的基礎上給出了一種系統的穩態控制輸入和參考速度的計算方法,得到了系統的動態誤差模型。接著,考慮到卷繞過程中存在的參數不確定和時變性,引入區間矩陣進行描述,在此基礎上,根據Lyapunov穩定性理論得到了使閉環系統魯棒漸近穩定的LMI充分條件。最后,以實驗室搭建的三電機卷繞系統為例進行了仿真和平臺實驗,實驗結果證明了所提出的控制方法的有效性和魯棒性。
關鍵詞:卷繞系統;線性矩陣不等式;狀態反饋;區間變量;魯棒漸近穩定
0引言
多電機卷繞系統在造紙、印刷、紡織、金屬箔、聚合物等生產工業中得到廣泛應用。該類系統的主要目標是在控制張力穩定的基礎上盡可能的提高處理速度,以實現在保證產品質量的基礎上提高生產效率[1]。實際上,由于卷繞系統的工料張力和速度之間存在耦合,速度的變化會影響張力的變化,張力的變化也會引起速度的變化,這給實際控制帶來了困難。目前,實際工業中的卷繞系統大多采用分散PI或者PID控制,將張力速度控制解耦成速度控制環和張力控制環,但對于一些控制精度要求較高的場合,這種類型的控制策略難以獲得令人滿意的控制效果[1-3]。文獻[4]提出了一種針對鋼管柔性生產線的開卷張力進行控制的二維模糊控制控制方案。文獻[5]設計了模糊二階自抗擾控制器實現了電機間張力和速度的解耦;文獻[6-7]提出了基于極點配置的解耦控制方法,并分別應用到帶鋼平整機和退火機的張力速度控制中;文獻[8-9]分別設計了帶增益調度的二自由度H2和H魯棒控制器,通過前饋單元實現張力和速度的解耦,通過反饋單元提高系統的抗干擾能力。然而,由于卷繞系統中存在時變和不確定參數,導致前述的解耦控制方法很難完全有效的抑制速度和張力之間的相互影響[10]。
在整個工作過程中,收、放卷輥的半徑和轉動慣量隨時間大范圍內變化,環境溫度和濕度對工料楊氏模量和摩擦系數影響較大,因此,魯棒性是卷繞系統控制器設計需要考慮的問題。文獻[2]通過引入線性變參數策略(linear parameter varying,LPV)增強了PI控制器對半徑變化的魯棒性;文獻[1,8-9,11]的控制器設計是基于卷繞系統的局部線性化模型,通過引入LPV[1,8]或者增益調度策略[1,8-9,11]增強控制器對半徑和轉動慣量變化的魯棒性。文獻[10]考慮了楊氏模量、輥子半徑和轉動慣量等參數有界不確定(偏離標稱值±10%)情況下H控制器的設計問題。文獻[12-13]利用神經網絡、模糊控制的非線性逼近能力處理系統模型的不確定性。文獻[14-15]分別提出了非線性滑膜控制和模型參考自適應控制,這兩種控制方法都將卷繞系統的時變參數(如輥子半徑、轉動慣量等)融入到控制器中。實際上,在卷繞過程中,收、放卷輥的半徑和卷動慣量是不斷變化的,環境溫度和濕度對工料楊氏模量和摩擦系數影響較大,有時根據生產的要求需要調整張力和速度的大小,因此,這些參數的值是不確定的或時變的。但由于實際條件的限制,半徑和轉動慣量只能在一定的范圍內變化,環境溫度和濕度對參數的影響也是有限的,參考張力和速度也只能在一定范圍內重新設定。因此,這些參數可以看成區間變量[16],卷繞系統可以看成區間系統[17]。
本文研究了多電機卷繞系統的魯棒鎮定問題,提出了一種基于線性矩陣不等式(linear matrix inequality,LMI)的狀態反饋魯棒控制器的設計方法。首先在文獻[14]的非線性數學模型基礎上,采用Taylor公式得到了系統處于平衡狀態時的控制輸入并推導出動態誤差模型。接著,為了處理動態誤差模型中的不確定和時變參數,引入區間矩陣[17]進行描述。在此基礎上,設計了基于狀態反饋的魯棒控制器,根據Lyapunov穩定性理論推導出使系統魯棒漸近鎮定的LMI充分條件。最后通過仿真和實驗平臺實驗證明了本文方法的有效性。
1卷繞系統動態模型與預備知識
實驗室研制的三電機卷繞系統實驗平臺如圖1所示,該系統由放卷輥、牽引輥和收卷輥3個獨立的機電子系統組成,3個子系統通過工料(白色牛皮紙帶)聯成一體。正常工作時,工料從放卷輥展開,經過一系列處理后由收卷輥收取。
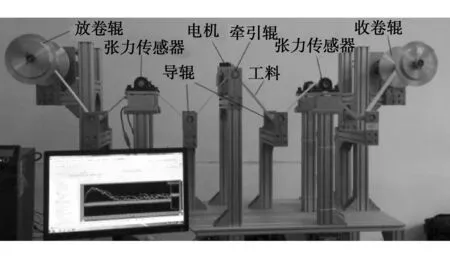
圖1 實驗平臺Fig.1 Experimental setup
圖2為平臺的結構示意圖。圖中Ri為第i個輥子的實時半徑;vi為第i個輥子上工料的線速度,工料在輥子上無滑動時,工料線速度等于輥子線速度;系統的輸入是電機的輸出轉矩ui(i=0,1,2);被控量為放卷張力t1、收卷張力t2和牽引輥速度v1,整個系統的速度由v1決定,放卷張力t1和收卷張力t2分別通過控制放卷和收卷電機的速度進行調節。
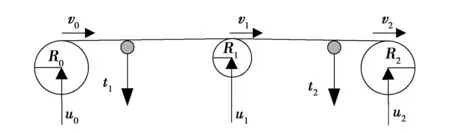
圖2 實驗平臺示意圖Fig.2 Sketch of the experimental setup
三電機卷繞系統的非線性動態數學模型為[14]:

(1)

(2)

(3)

(4)

(5)

(6)

(7)

(8)
式中:Ji和bfi分別為第i個輥子的實時轉動慣量和摩擦系數;ni為第i個電機軸與對應的驅動輥之間的傳動比;E、S、ρ、b和h分別為工料的楊氏模量、截面積、密度、寬度和厚度;L1和L2分別為放卷輥到牽引輥和牽引輥到收卷輥的工料長度;t0為放卷前放卷工料的內張力;Jci和Rci分別為空收、放卷輥的轉動慣量和半徑;Jmi為電機側旋轉單元的轉動慣量。其中放卷端的轉動慣量J0和半徑R0隨著工料的釋放而不斷減小,由于收集處理后的工料而使收卷端轉動慣量J2和半徑R2不斷增大。
在本節結束前給出一些后面證明中需要用到的定義和引理。

引理1[18]區間矩陣A∈[Am,AM],A可以寫成

其中
A0=(Am+AM)/2,
ΔA=ΕaΣaFa,
HA=(AM-Am)/2=[ζij]n×n,



|χij|1,1i,jn}。
這里ei(i=1,2,…,n)為n×n維單位矩陣的第i個列向量。顯然對?Σ∈Σ*,有ΣTΣI。
引理2[19]設X和Y為合適維數的實矩陣,對于任意給定的正常數ε,有下列不等式成立:
XTY+YTXε-1XTX+εYTY。
注:文中矩陣小于0表示該矩陣是負定的。本文中所有對矩陣大于0或小于0的描述都分別表示該矩陣是正定或負定的。
2魯棒控制器設計
卷繞系統的控制輸入分成兩部分,一部分是穩態控制量,指在不考慮外界干擾和系統不確定性的情況下,保持張力和速度穩定在參考值時所需要的控制量;另一部分是控制補償,當系統存在干擾作用時,使張力和速度跟隨誤差收斂所需要的控制量。
2.1穩態控制輸入和誤差動態模型
為了獲得系統的穩態控制輸入,定義如下變量:
(9)
式中,vri和tri為速度和張力的參考值,usi為穩定狀態時的控制輸入,Vi和Ti為速度和張力的跟蹤誤差,Ui為控制補償。
采用Taylor公式將式(1)展開,忽略余項,同時將ti=Ti+tri代入有

(10)
(11)
放卷張力的跟隨誤差模型可表示為

(12)
同樣,采用Taylor公式可將式(2)展開為

(13)

(14)
放卷輥速度的跟隨誤差模型為

(15)
同樣,由式(3)、式(4)和式(5)可以得到:

(16)

(17)

(18)
(19)

(20)

(21)
式(11)和式(18)為收、放卷輥的參考速度,對于任意一組設定值(tr1,tr2,vr1) ,其值是確定的。式(14)、式(16)和式(20)為系統穩定時的控制輸入,它們是輥子半徑、參考速度和參考張力的函數,因此,穩態控制輸入對不同的工作點具有自適應能力。
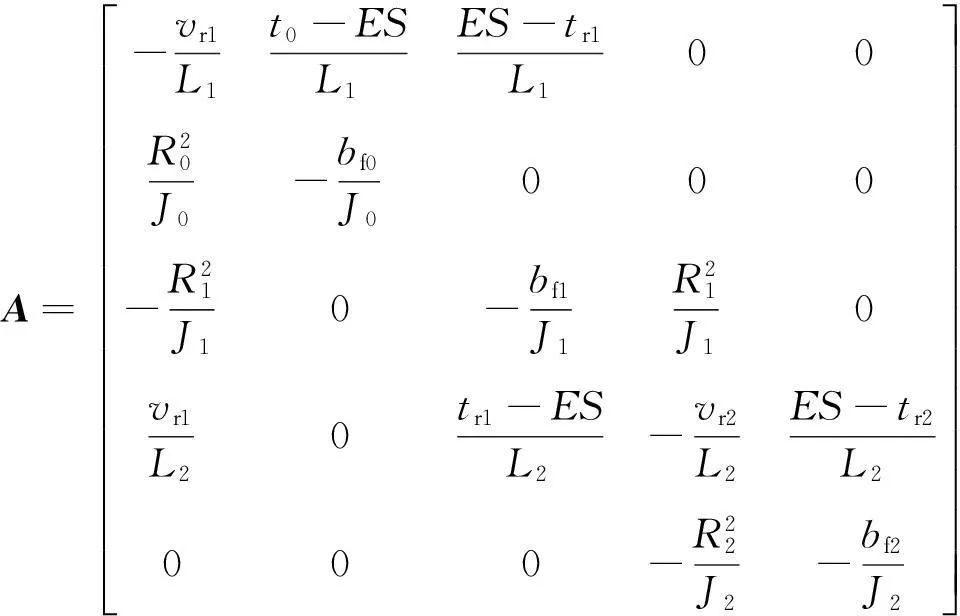
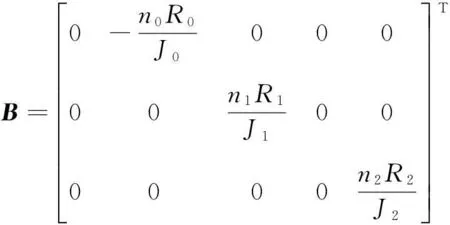
根據式(12)、式(15)、式(17)、式(19)和式(21)可將系統誤差模型寫成

(22)
式中:


2.2狀態反饋控制器設計
根據前面的分析可知,模型(22)中含有時變和不確定參數,要獲得好的控制效果,設計的控制器必須有足夠強的魯棒性以消除這些參數的影響。下面將給出魯棒控制器的設計過程。
對于給定的多電機卷繞系統,受實際工作條件的限制,其參數R0、R2、J0和J2在一定的范圍內變化,設定值vr1、tr1和tr2也不能超過某一特定的值,環境對E和bfi(i=0,1,2)的影響也是有限的。因此,這些參數可以看成區間變量,下列假設是合理的。
(23)
根據區間變量的四則運算和代數性質[16],由式(7)可以求出在條件(23)下轉動慣量J0、J2變化的上下界,收、放卷的參考速度vr0和vr2的上、下界也可由式(11)和式(18)得到。由式(22)可以看出系統矩陣A和輸入矩陣B中的一些元素為上述區間變量的函數,根據區間變量的四則運算和代數性質[16]同樣可以推算出這些元素的變化區間。這樣,根據引理1,模型(22)可以寫成
(B0+EbΣbFb)(U+Fc)。
(24)
設計如下的狀態反饋控制器
U=KX-Fc。
(25)
其中K是反饋增益矩陣。
系統(24)在控制器(25)作用下的閉環系統為

(26)
可以得到如下定理。
定理1對于滿足條件(23)的系統(22),如果存在實對稱正定矩陣Q、正常數α,β和矩陣M使下面的LMI成立,則系統(22)在控制器(25)作用下得到的閉環系統(26)對平衡狀態X0=0是漸近穩定的。
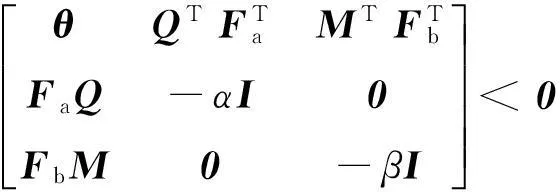
(27)
證明:由式(26)可知X0=0是閉環系統的平衡狀態。要使卷繞系統能夠實現對張力和速度的漸近跟蹤,需要系統(26)在X0=0是漸近穩定的。
選取Lyapunov候選函數為
V(X)=XTPX。
(28)
式中P為實對稱正定矩陣。將式(28)沿軌跡(26)對時間求導,經整理后可得
(EaΣaFa)TP+P(EaΣaFa)P+
(EbΣbFbK)T+P(EbΣbFbK)]X。
(29)
(EaΣaFa)TP+P(EaΣaFa)=

(30)
和
(EbΣbFbK)TP+PEbΣbFbK≤

(31)
其中α,β為正常數,將式(30)和式(31)代入式(29)有

(32)
式中


(33)
由式(9)可知實際控制量ui=Ui+usi,(i=0,1,2),通過式(14)、式(16)和式(20)可以計算出usi,未知干擾和系統不確定性帶來的影響通過控制量Ui進行抑制,其總體的控制結構如圖3所示。
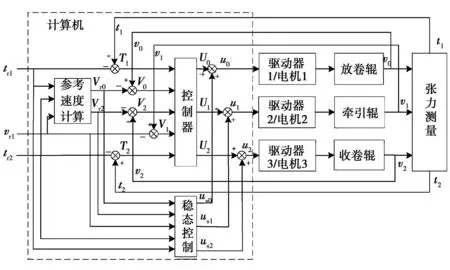
圖3 三電機卷繞系統控制框圖Fig.3 Block diagram of three-motor winding system
3實驗研究
3.1仿真實驗研究
為了驗證本文所設計的魯棒控制器的有效性,采用Matlab對控制系統進行仿真,并與常規的分散PID控制進行比較。

在控制器設計時,考慮了楊氏模量和摩擦系數在上述標稱值的±30%范圍內波動,半徑和參考值的變化范圍如下:
(34)
首先假設楊氏模量和摩擦系數為標稱值,牽引輥初始給定值vr1為0.5m/s,3s時突加到1m/s,放卷張力初始值tr1為10N,1s時突加到15N,收卷張力初始值tr2為15N,2s時突減到10N,采用PID控制和魯棒控制時的響應曲線如圖4所示。
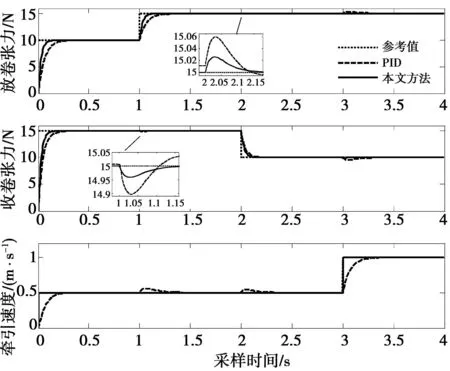
圖4 標稱參數下張力和速度仿真曲線Fig.4 Simulation curves of the tensions and velocity with the nominal parameters
由圖4可以看到,與PID控制相比,采用本文所提出的魯棒控制方法張力和速度能更快、更穩定的跟隨設定值。當速度突變時,PID控制對放卷和收卷張力影響明顯;收、放卷張力變化對速度也有明顯的影響。而采用魯棒控制時,無論放卷張力變化還是收卷張力變化對速度的影響都不明顯;當放卷張力或者速度發生變化時,收卷張力有很小的變化,當收卷張力變化時,甚至采用PID控制時放卷張力看不到明顯變化。表1統計了兩種控制方式下張力和速度的相對最大變化值(括號中的數表示出現的時間)。由表1可以看出采用本文提出的魯棒控制方法,張力和速度的最大變化比PID控制時小很多。
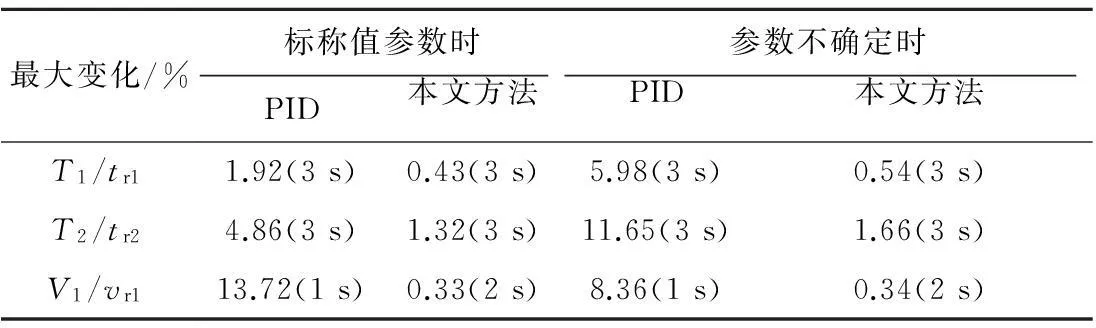
表1 仿真中設定值改變時張力和速度最大變化統計
為了驗證本文方法的魯棒性,假設楊氏模量E、摩擦系數bfi和轉動慣量Ji(i=0,1,2)等參數存在不確定性,在仿真時假設它們在標稱值上下30%范圍內隨機變化(實際應用中這些參數的不確定性不可能有如此強烈)。圖5顯示了楊氏模量E、摩擦系數bf0和轉動慣量J0的變化曲線,限于篇幅,其他參數未一一顯示。在該條件下,PID控制和魯棒控制的效果見圖6。
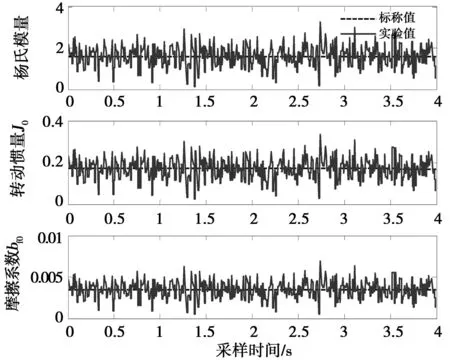
圖5 部分系統參數變化曲線Fig.5 Change curves of some system parameters
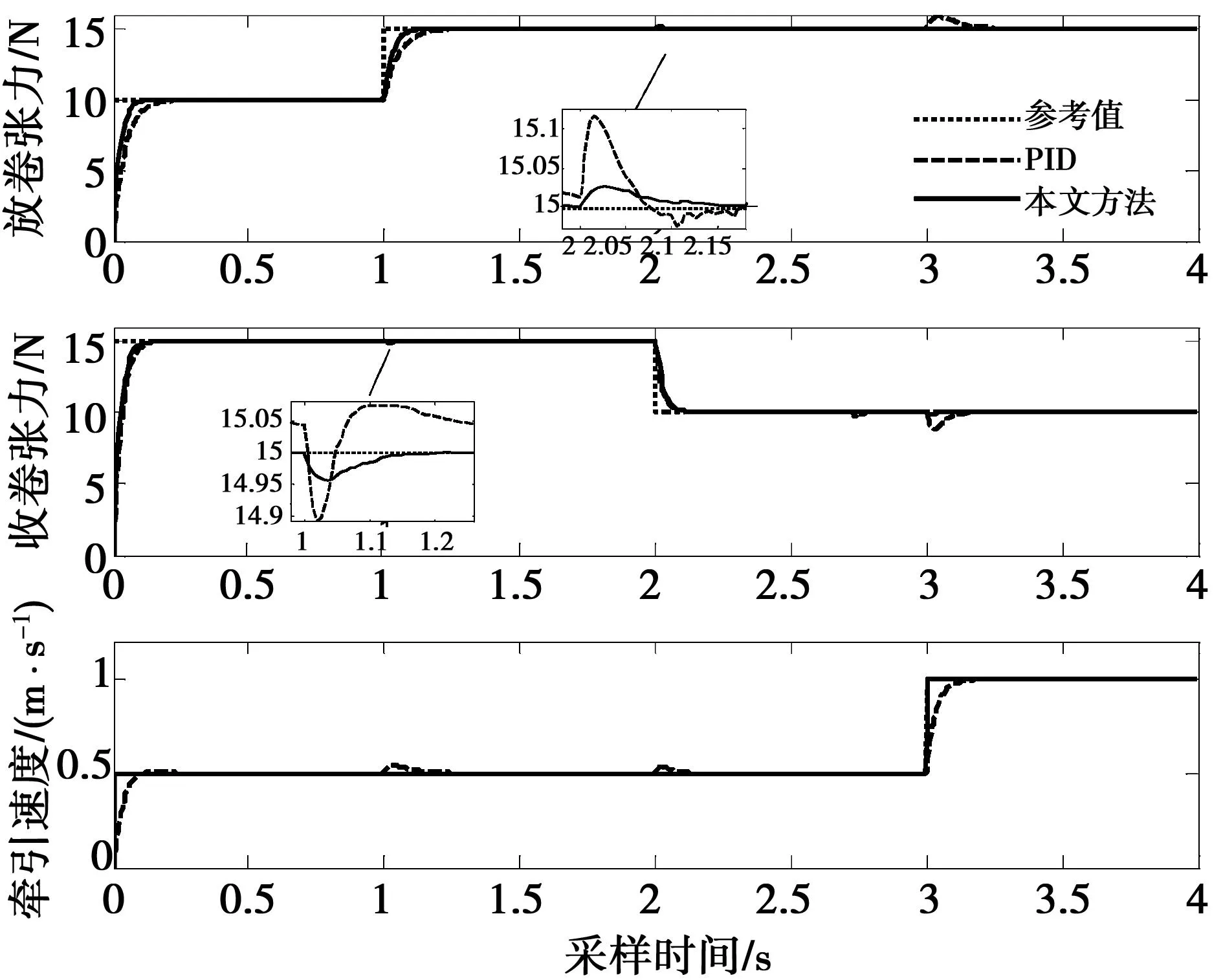
圖6 不確定參數下張力和速度突變的響應曲線Fig.6 Simulation curves of the tensions and velocity with the uncertain parameters
由圖6可以看出,在參數存在不確定性的情況下,兩種控制方法下張力和速度的控制效果都有一定的變差。由表1可以看出,PID控制時收、放卷張力和速度相對最大變化值增加比較明顯,當速度發生變化時(3 s時),放卷張力最大變化由1.92%增加到5.98%,收卷張力最大變化由4.86%增加到11.65%。而采用本文提出的方法兩者變化值分別從0.43%和1.32%增加到0.54%和1.66%,增加量并不太明顯。從仿真效果來看,本文提出的方法對參數變化有較強的魯棒性。
3.2實驗研究
采用本文所提出的方法在圖1所示的自制實驗平臺上進行實驗,并與常規的PID控制方法進行對比。實驗平臺的收、放卷電機型號為西門子1FK7060-5AH71-1型永磁同步電機,牽引電機型號為西門子1FK7042-5AH71-1型永磁同步電機。電機速度由編碼器測量,張力由科帝公司的張力傳感器測量。
當牽引電機以線速度0.5 m/s,放卷和收卷張力分別為10 N和15 N穩定運行后,開始采集數據。20 s時將放卷張力由10 N突增到15 N,50 s時將收卷張力突減到10 N,80 s時將速度由0.5 m/s突增到1 m/s,PID控制和本文的方法的實驗結果分別如圖7、圖8和表2所示。
通過對比圖7和圖8可以看出采用本文的方法明顯減小了速度和張力間的相互影響,其結果與仿真結果相一致。給定速度為0.5 m/s時,放卷張力增大50%,采用PID控制時速度變化為15.88%,收卷張力減小50%時,速度變化為26.72%。而速度增大到1 m/s,速度的調節時間約為0.1 s,放卷張力和收卷張力變化分別為5.07%和9.20%。本文設計的控制器放卷和收卷張力變化對速度的影響小得多,分別為11.30%和15.58%;速度變化的調節時間為0.06s,超調小,對收、放卷張力的影響也小很多,分別為2.84%和4.90%。表2列出了張力和速度設定值變化時的相互影響,由表2中的速度和張力最大變化值可以看出,對以PID控制,提出的魯棒控制明顯減小了張力和速度間的相互影響,抑制干擾的能力更強。綜合以上分析可以看出,采用本文提出的魯棒控制器控制時控制效果明顯優于PID控制。
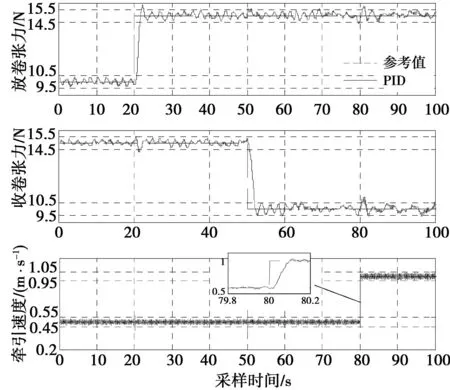
圖7 PID控制的實驗結果Fig.7 Experiment results with PID controllers
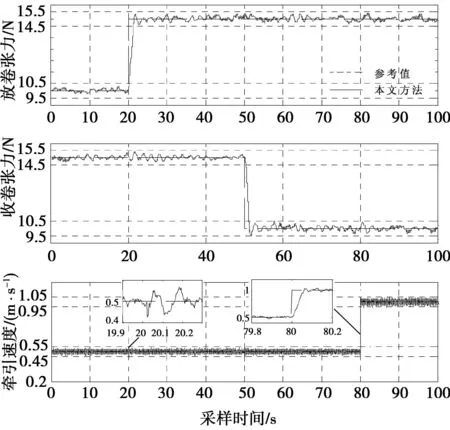
圖8 本文方法的實驗結果Fig.8 Experiment results with the proposed method
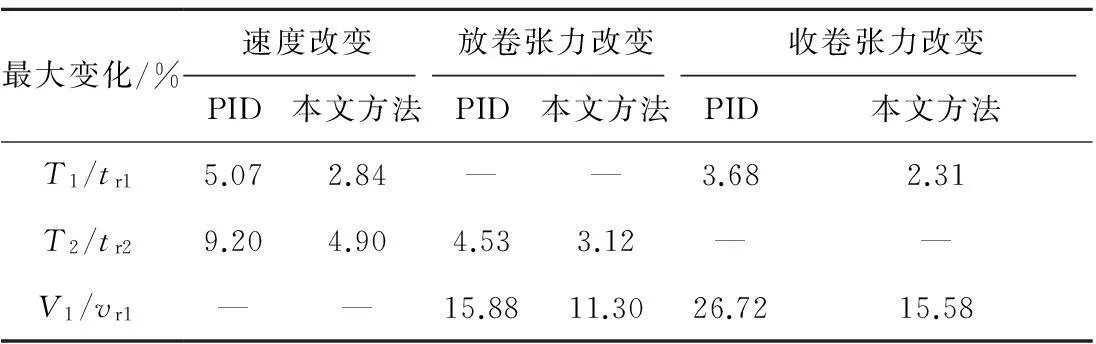
最大變化/%速度改變放卷張力改變收卷張力改變PID本文方法PID本文方法PID本文方法T1/tr15.072.84——3.682.31T2/tr29.204.904.533.12——V1/vr1——15.8811.3026.7215.58
5結論
本文以三電機卷繞系統為研究對象,提出了一種基于LMI的魯棒控制器設計方法。首先,根據系統參考張力和參考速度計算出了系統的穩態控制輸入和收、放卷輥的參考速度,同時得到了系統的動態誤差模型;接著,在動態誤差模型的基礎上,提出了一種基于狀態反饋的魯棒控制器設計方法,在控制器設計過程中將設定值的改變,將收、放卷輥半徑、轉動慣量和受環境影響大的楊氏模量、摩擦系數等看成區間變量進行處理,因而所得的控制器對不同的工作點具有自適應能力且對參數變化具有較強的魯棒性;此外,控制器參數只需要通過求解LMI就可得到,求解方便。最后,仿真和平臺實驗結果證明了本文所提出的控制方法的有效性。
參 考 文 獻:
[1]HAKAN Koc,DOMINIQUE Knittel,MICHEL de Mathelin,et al.Modeling and robust control of winding systems for elastic webs[J].IEEE Transactions on Control Systems Technology,2002,10(2):197-208.
[2]VINCENT Gassmann,DOMINIQUE Knittel.Robust PI-LPV tension control with elasticity observer for roll-to-roll systems[C]//15th IFAC World Congress on,August 28-September 2,2011: 8639-8644.
[3]VINCENT Gassmann,DOMINIQUE Knittel,PRABHAKAR R Pagilla,et al.Fixed-orderHtension control in the unwinding section of a web handling system using a pendulum dancer[J].IEEE Transactions on Control Systems Technology,2012,20(1):173-180.
[4]茹鋒,茹媛,胡飛虎.柔性成型生產中電機模糊張力控制技術研究[J].電機與控制學報,2011,15(2): 89-93.
RU Feng,RU Yuan,HU Feihu.Research on tension control technology based on fuzzy control algorithm[J].Electric Machines and Control,2011,15(2):89-93.
[5]劉星橋,唐琳,朱麗婷.模糊自抗擾控制的三電機同步協調系統[J].電機與控制學報,2013,17(4): 104-109.
LIU Xinqiao,TANG Lin,ZHU Liting.Three-motor synchronous control system based on fuzzyactive disturbances rejection control[J].Electric Machines and Control,2013,17(4): 104-109.
[6]賀建軍,喻壽益,鐘掘.板帶鋼平整機張力-速度解耦控制[J].控制與決策,2003,18(5): 522-526,544.
HE Jianjun,YU Shouyi,ZHONG Jue.Tension-speed decoupling control of temper mill for plate-strip steet[J].Control and Decision,2003,18(5): 522-526,544.
[7]白銳,佟紹成,蔡天佑.連續退火機組張緊輥帶鋼張力的建模及解耦控制[J].控制理論與應用,2013,30(3):392-397.
BAI Rui,TONG Shaocheng,CHAI Tianyou.Modeling and decoupling control for the strip tension of bridling roll in the continuous amnealing line[J].Control theory & Application,2013,30(3):392-397.
[8]CLAVEAU F,CHEVREL P,KNITTEL K.A 2DOF gain-scheduled controller design methodology for a multi-motor web transport system[J].Control Engineering Practice,2008,16:609-622.
[9]DOMINIQUE Knittel,EDOUARD Laroche,DANIEL Gigan,et al.Tension control for winding systems with two-degrees-of-freedomHcontrollers[J].IEEE Transactions on Industry Applications,2003,39(1):113-120.
[10]DOU Xijiang,WANG Wilson.Robust control of multistage printing systems [J].Control Engineering Practice,2010,18: 219 -229.
[11]ANDREW Kadik,WILSON Wang.Adaptive force control of in web handling systems[J].Intelligent Control and Automation,2012,3: 329 -336.
[12]Janabi-Sharifi F.A neuro-fuzzy system for looper tension control in rolling mills[J].Control Engineering Practice,2005,13:1-13.
[13]CHEN Chiehli,CHANG Kuoming,CHANG Chihming.Modeling and control of a web-fed machine[J].Applied Mathematical Modelling,2004,28 :863-876.
[14]ABJADI N R,SOLTANI J,ASKARI J,et al.Nonlinear sliding-mode control of a multi-motor web-winding system without tension sensor[J].IET Control Theory and Applications,2009,3(4):419-427.
[15]PRABHAKAR R Pagilla,NILESH B Siraskar,RAMAMURTHY V Dwivedula.Decentralized control of web processing lines[J].IEEE Transactions on Control Systems Technology,2007,15(1):106-117.
[16]王雅文,宮云戰,肖慶,等.擴展區間運算的變量值范圍分析[J].北京郵電大學學報,2009,32(3) :36-41.
WANG Yawen,GONG Yunzhan,XIAO Qing,et al.Introduction of interval analysis[J].Journal of Beijing University of Posts and Telecommunications,2009,32(3):36-41.
[17]LU Junguo,CHEN Yangquan.Robust stability and stabilization of fractional-order interval systems:an LMI approach[J].IEEE Transactions on Automatic Control,2009,54 (6) :1294-1299.
[18]申濤,王孝紅,袁鑄鋼.一類不確定系統的魯棒穩定性分析[J].自動化學報,2007,33(4) : 426-427.
SHEN Tao,WANG Xiaohong,YUAN Zhugang.Robust stability for a class of uncertain system[J].Acta Automatica Sinica,2007,33(4) : 426-427.
[19]Silviu-Inlian N,ROGELIO L.On the passivity of linear delay systems[J].IEEE Transactions on Automatic Control,2001,46(3): 460-464.
[20]BOYD s,GHAOUI L E,BALAKRISHNAN V.Linear matrix inequalities in systems and control theory[M].Philadelphia:Society for Industrial Mathematica,1994.
(編輯:劉琳琳)
State feedback robust control for three-motor winding system—LMI approach
HOU Hai-liang1,2,NIAN Xiao-hong1,PENG Zhi1,WANG Zhong1
(1.School of Information Science and Engineering,Central South University,Changsha 410004,China;2.School of Information,Hunan University of Humanities,Science and Technology,Loudi 417000,China)
Abstract:For the multi-motor winding system with strong coupling,uncertainties and nonlinearities,a global robust control strategy based on linear matrix inequality (LMI) was proposed.Firstly,a method for computing the equilibrium control inputs and reference speeds based on the mathematic model of the winding system was given,and the variation dynamic model was derived.Then,in order to cope with the uncertain and time-varying parameters existing in the winding system,interval matrix was introduced.Sufficient condition of closed-loop winding system robustly asymptotic stability was derived based on Lyapunov stability theory and the result was presented in terms of the LMI.Finally,the effectiveness and robustness of the proposed method was validated by some computer simulation and experimental setup experiments.
Keywords:winding system; linear matrix inequality (LMI); state feedback; interval variable; robustly asymptotic stability
收稿日期:2015-03-31
基金項目:國家自然科學基金(61473314,61403425,61321003,61472135);婁底市科技計劃項目(2015KJ012);湖南省重點建設學科項目
作者簡介:侯海良(1980—),男,博士研究生,研究方向為多電機系統協調控制、復雜系統建模與優化; 年曉紅(1965—),男,教授,博士生導師,研究方向為交流技術與傳動控制,多電機協調控制;
通信作者:侯海良
DOI:10.15938/j.emc.2016.07.015
中圖分類號:TP 273
文獻標志碼:A
文章編號:1007-449X(2016)07-0111-08
彭智(1991—),男,碩士研究生,研究方向為多電機協調控制;
王忠(1991—),男,碩士研究生,研究方向為多電機協調控制。