TCAS II與ADS
—B數據融合新算法*
2016-06-13 08:43:13田士佳楊霄鵬曹逸樵
傳感器與微系統 2016年3期
關鍵詞:卡爾曼濾波
田士佳, 楊霄鵬, 姚 昆, 曹逸樵
(1.空軍工程大學 信息與導航學院,陜西 西安 710077;2.94710 部隊,江蘇 無錫 214141)
?
計算與測試
TCAS II與ADS
—B數據融合新算法*
田士佳1, 楊霄鵬1, 姚昆1, 曹逸樵2
(1.空軍工程大學 信息與導航學院,陜西 西安 710077;2.94710 部隊,江蘇 無錫 214141)
摘要:針對空中交通流量越來越大,TCAS II無法滿足日益增長的防撞需求,提出了根據估計誤差協方差最大特征值加權的數據融合算法。該算法首先分析TCAS II和ADS—B的原理和特點,闡述了結合ADS—B優勢發展組合監視的必要性,重點介紹組合監視區域,采用Kalman濾波對飛機進行目標跟蹤,對局部濾波得到的航跡進行加權融合,得到最優估計,對算法進行仿真,結果驗證該算法能夠得到較高精度數據,提高監視能力,增強防撞性能。
關鍵詞:TCAS II; ADS—B; 組合監視; 數據融合; 卡爾曼濾波
0引言
隨著世界航空業的發展,空中交通流量每年遞增10 %以上,飛機之間發生沖突的概率大大增加。交通警戒與防撞系統(traffic alert and collision avoidance system,TCAS)的出現更好地幫助飛行員了解飛機周圍的空域情況,提高了飛行的安全系數[1]。目前世界范圍內使用的TCAS大多屬于TCAS II系統,它在實際應用過程中暴露出虛警和不必要的告警等問題,而且沖突預測能力隨著航路飛行復雜性的增加而大大降低[2]。廣播式自動相關監視(automatic dependent surveillance-broadcast,ADS—B)具有更強的監視能力、精度誤差更小、數據更新率快等優勢,能夠更即時、更準確地進行沖突檢測[2]。現階段直接用ADS—B主動監視代替TCAS II被動監視是不現實的,一旦衛星定位系統出現問題,將導致監視和沖突探測能力的喪失,而且ADS—B的性能需要大量測試和評估來驗證[3]。因此,將TCAS II信息與ADS—B信息進行數據融合,發展組合監視是非常必要的。
本文提出了一種根據估計誤差協方差最大特征值加權的數據融合算法,對局部濾波得到的航跡進行加權融合,得到最優估計。
1TCAS II與ADS—B相關理論
TCAS II是獨立運行的空中交通防撞系統,可以判定飛機相對運動過程中的正確行動過程,并且提供垂直的修正、預防措施的決斷告警,為裝備應答機的飛機提供保護。TCAS II通過機載設備主動探測附近的飛機,根據高度層的不同,在距沖突20~48s時產生交通告警(TA),在距沖突15~35 s時發出解脫建議決斷告警(RA)[4]。
ADS—B是一種基于衛星定位和利用空—地、空—空數據鏈通信完成交通監視和信息傳遞的空管監視新技術[5]。ADS—B系統包含機載和地面設備兩部分,機載設備以GPS進行實時定位后,周期性地將飛機的位置、速度、高度等數據信息向外廣播,其周圍的飛機和地面基站都能收到這些數據。
2TCAS II與ADS—B組合監視區域
由TCAS II和ADS—B技術構成的組合監視系統[6],是在TCAS II的基礎上,將TCAS II信息和ADS—B信息進行數據融合,將更精確的信息送入TCAS II決策模塊,進而提供監視、警戒和避讓信息。由于TCAS II和ADS—B監視范圍不同,所以,構成的組合監視區域不同的區域監視手段不同,TCAS II的最大水平監視范圍為40 n mile,主要是前向作用距離,在本機的側面和后面的監視范圍更小[7],ADS—B的水平監視范圍為圓形,且大于100 n mile[8],TCAS II和ADS—B的水平方向組合監視區域和組合監視流程示意圖分別如圖1、圖2所示。
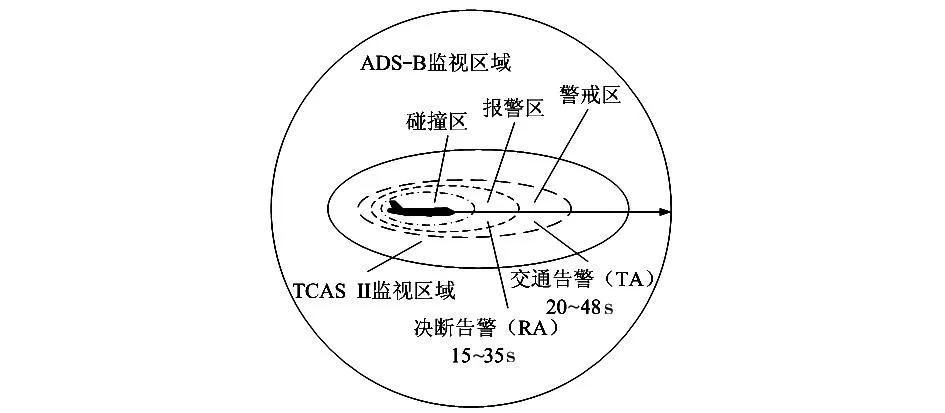
圖1 水平方向組合監視區域示意圖Fig 1 Schematic diagram of in horizontal direction ofcombined surveillance area
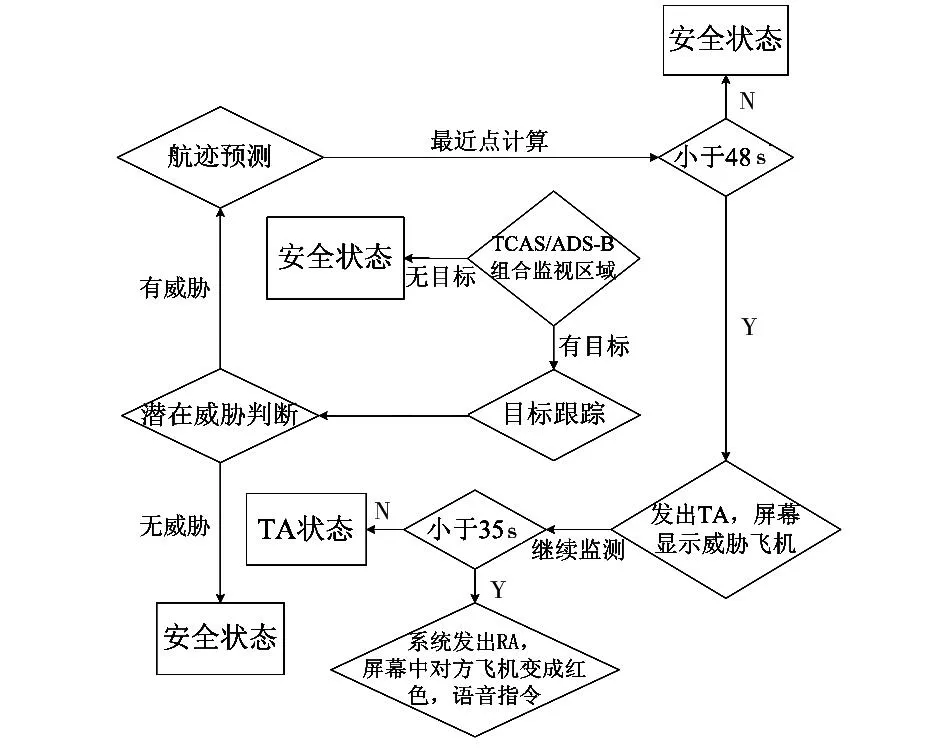
圖2 組合監視流程示意圖Fig 2 Schematic diagram of combined surveillance process
3TCAS II與ADS—B數據融合算法
3.1數據融合結構
針對TCAS II在實際應用中暴露出的問題,結合ADS—B具有更強監視能力的特點,采用分布式融合方法[9],由于部分任務在局部航跡估計中完成,大大減少了中央處理器的工作量,既提高了數據處理的效率,又提高了整個系統的精度和可靠性,融合結構框圖如圖3所示。

圖3 分布式融合結構原理圖Fig 3 Principle diagram of distributed fusion structure
3.2數據融合算法
將TCAS II和ADS—B當作兩個監視子系統,分別利用Kalman濾波方法對子系統的監視信息進行濾波,得到狀態估計信息,狀態方程和量測方程為
X(k+1)=F(k)X(k)+Γ(k)W(k),
(1)
Z(k)=H(k)X(k)+V(k),
(2)
式中X(k)為k時刻的系統狀態向量;F(k)為系統狀態轉移矩陣;Γ(k)為噪聲矩陣;W(k)為過程演化噪聲,為方差Q(k)的零均值、高斯白噪聲;Z(k)為k時刻對系統狀態的量測向量;H(k)為量測矩陣;V(k)為量測噪聲,為方差R(k)的零均值、高斯白噪聲。
若使用的是第i個濾波器,對局部狀態Xi(k)最優估計的算法如下:
初始條件為
(3)
2)一步提前估計值和估計誤差的協方差陣分別是
(4)
Pi(k+1|k)=F(k)Pi(k|k)FT(k)+
Γ(k)Q(k)ΓT(k),
(5)

3)獲取新的量測Zi(k+1)后,濾波更新值和相應的濾波誤差的協方差陣分別為

(6)
Pi(k+1|k+1)=[1-Ki(k+1)Hi(k+1)]×
Pi(k+1|k),
(7)


(8)
考慮整體最優狀態為局部估計的線性組合,本文采用加權平均的方法,因為兩個子系統的監視是相互獨立且同時進行的,所以,認為兩個系統局部狀態估計之間的協方差為零,可以用單傳感器估計誤差協方差的最大特征值來確定局部狀態估計的權重,得到兩個特征值中較大的說明估計誤差較大,應該給一個較小的權重;相反,特征值較小所占的權重較大,整體最優融合估計[10]為

(9)

(10)

(11)
式中λj(P1),λj(P2)分別為TCAS Ⅱ和ADS—B估計誤差協方差矩陣的第j個特征值。

由此可得,通過對TCAS Ⅱ信息和ADS—B信息進行按估計誤差協方差最大特征值加權,能夠得到目標飛機的最優融合估計。
4數據融合仿真實驗
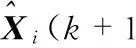
在驗證數據融合算法仿真實驗中,驗證的是組合監視區域的仿真,TCAS II系統和ADS—B技術的采樣周期為1 s,假設TCAS II系統和ADS—B技術的觀測誤差分別為60 dB和40 dB,且均為高斯白噪聲,飛機在飛行階段垂直方向上均無速度和加速度,水平初始速度為300 m/s,按照此狀態飛行50 s,然后以5 m/s2的加速度飛行50 s,然后再按恒定速度飛行50 s,融合算法仿真結果如圖4、圖5、圖6和圖7所示。
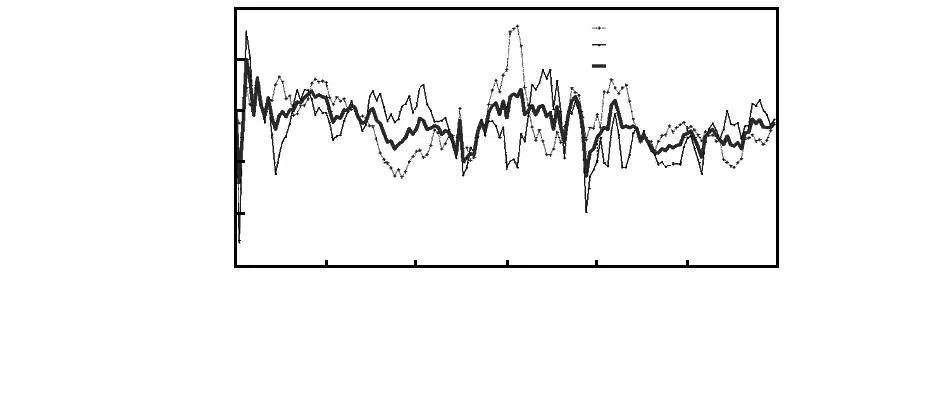
圖4 位置估計誤差圖Fig 4 Position estimation error chart
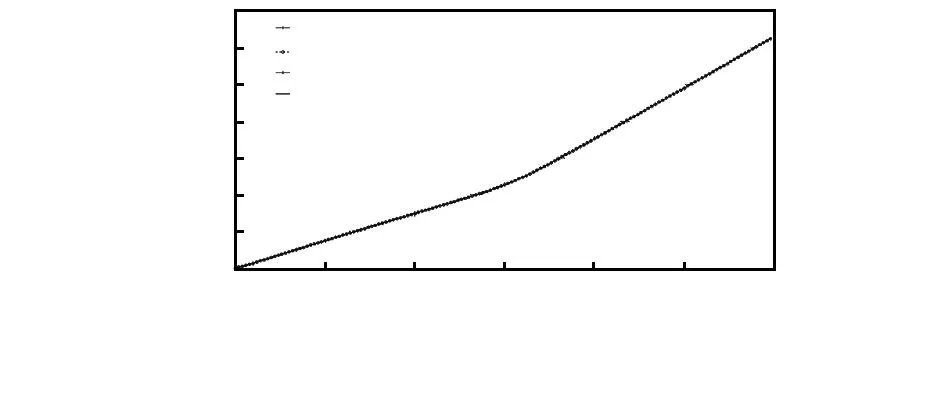
圖5 估計位置與真實位置比較圖Fig 5 Comparison between estimated position and real position
圖6 估計速度與真實速度比較圖Fig 6 Comparison between estimated speed and real speed
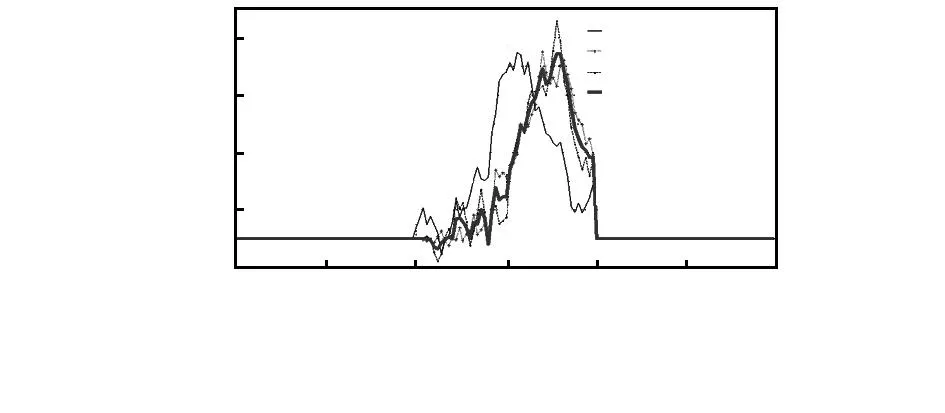
圖7 估計加速度與真實加速度比較圖Fig 7 Comparison between estimated acceleration andreal acceleration
以上仿真結果表明,數據融合后的位置估計誤差比任何一個單獨傳感器估計都要小,并且融合之后的誤差變化更加穩定。根據航空無線電技術委員會(RTCA)和歐洲民用航空設備組織(EUROCAE)文件對ADS—B監視精度的要求,在航路5 n mile間隔和終端區域3 n mile內位置精度要求分別為558 m和186 m,而且TCAS Ⅱ的位置精度要求更低,所以,數據融合后的狀態估計滿足要求[11],取得了較好的效果。
5結束語
本文針對TCAS Ⅱ單一傳感器在實際應用中暴露出的問題,采用TCAS Ⅱ和ADS—B組合監視的方法,以TCAS II原有的功能為基礎,將TCAS Ⅱ信息和ADS—B信息進行數據融合,利用提出的估計誤差特征值加權的算法對數據進行融合,通過仿真實驗驗證算法能夠減小目標飛機的狀態估計誤差。但是,本次實驗仿真未涉及TCAS Ⅱ信息和ADS—B信息的數據處理問題,目前ADS—B技術方興未艾,未來將會與TCAS Ⅱ更好地結合起來,為擴大飛機監視區域、提高監視精度和增強防撞性能開辟了廣闊的前景。
參考文獻:
[1]Yepes Javier Lovera,Hwang Inseok,Rotea Mario.New algorithms for aircraft intent inference and trajectory prediction[J].Journal of Guidance,Control and Dynamics Conference,2007,30(2):370-382.
[2]張軍.現代空中交通管理[M].北京:北京航空航天大學出版社,2005.
[3]何桂萍.ADS—B與雷達組合監視數據融合方法研究[D].廣漢:中國民用航空飛行學院,2011.
[4]RTCA DO—300.Minimum operational performance standards(MOPS)for traffic alert and collision avoidance system Ⅱ(TCAS Ⅱ)hybrid surveillance[S].
[5]顧春平.空中交通管制監視新技術簡介[J].現代雷達,2010,32(9):1-5.
[6]何桂萍,徐亞軍.基于TCAS II和ADS—B的組合監視防撞系統研究[J].電光與控制,2011,18(4):61-64.
[7]Aeroflex,XPDR/DME/TCAS/ADS—B/TIS/TIS—B test set IFR 6000 operation manual 1002—5800—290[S].2007.
[8]RTCA.Minimum operational performance standards for 1 090 MHz extended squitter automatic dependent surveillance-broadcast(ADS—B)and traffic information services-broadcast(TIS—B)volume 1[S].DO—260A,RTCA,Inc,2006.
[9]Vitale A,Corraro F,Bernard M,et al.Unscented Kalman filtering for reentry vehicle identification in the transonic regime[J].Journal of Aircraft,2009,46(5):1649-1659.
[10] 申功勛,孫建峰.信息融合理論在慣性/天文/GPS組合導航系統中的應用[M].北京:國防工業出版社,1998.
[11] 李自俊.一種基于ADS—B、WAM和雷達的組合監視方法及其架構[J].航空電子技術,2008,39(1):24-27.
A novel algorithm for TCAS II and ADS—B data fusion*
TIAN Shi-jia1, YANG Xiao-peng1, YAO Kun1, CAO Yi-qiao2
(1.College of Information and Navigation,Air Force Engineering University,Xi’an 710077,China;2.94710 Unit,PLA,Wuxi 214141,China)
Abstract:With increasing air traffic flow,TCAS II can’t meet growing demand for collision avoidance,data fusion algorithm based on the maximum eigenvalue weighting of estimation error covariance is proposed.Principle and characteristics of TCAS II and ADS—B are analyzed,the necessity of development of combining monitoring combined with advantages of ADS—B is expounded,and combined monitoring area is introduced.Kalman filtering is used for target tracking of aircraft,and the optimal estimation is obtained by weighted fusion of tracks obtained by local filtering.The algorithm is simulated and the results show that the algorithm can get higher precision of data,improve monitoring ability,and enhance performance of collision avoidance.
Key words:TCAS II; ADS—B; combined surveillance; data fusion; Kalman filtering
DOI:10.13873/J.1000—9787(2016)03—0130—03
收稿日期:2016—02—15
*基金項目:國家自然科學基金資助項目(61202490);航空科學基金資助項目(20150896010)
中圖分類號:V 249
文獻標識碼:A
文章編號:1000—9787(2016)03—0130—03
作者簡介:
田士佳(1992-),男,河北石家莊人,碩士研究生,主要研究方向為軍事航空通信。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36