基于接收功率電平的三角質心近距離定位算法*
2016-06-13 08:45:40陸楊潔劉志勤柴林香
傳感器與微系統 2016年3期
陸楊潔, 劉志勤, 楊 雷, 柴林香
(西南科技大學 計算機科學與技術學院, 四川 綿陽 621010)
?
基于接收功率電平的三角質心近距離定位算法*
陸楊潔, 劉志勤, 楊雷, 柴林香
(西南科技大學 計算機科學與技術學院, 四川 綿陽 621010)
摘要:針對無線傳感器網絡中近距離定位精度較低的問題,提出了一種基于接收功率電平(RPL)的免標定三角質心定位算法。該算法使用無線信號參數RPL代替傳統接收信號強度指示(RSSI),應用于測距模型中,與傳統三角質心定位模型相結合,從而達到降低測距誤差、提高定位精度的目的。通過仿真實驗,將基于RPL的三角質心定位算法與基于RSSI的三角質心定位算法進行對比,結果表明:在實驗環境下,基于RPL的三角質心定位算法比基于RSSI的三角質心定位算法精度提高了59.02 %,定位精度有明顯提升。
關鍵詞:近距離定位; 接收功率電平; 定位; 三角質心定位算法; 無線傳感器網絡
0引言
傳統無線定位方法很多,如到達時間(time of arrival,TOA)、到達時間差(time different of arrival,TDOA) 、 到達角(angle of arrival,AOA)、基于接收信號強度指示(received signal strength indication,RSS)的三邊測量定位方法[1]、基于RSSI指紋標定方法[2]、基于相似度定位方法、基于核嶺回歸(KRR)定位方法[3]等。其中,TOA,TDOA,AOA三種方法對硬件要求較高;基于RSSI的三邊測量定位方法、基于RSSI指紋標定方法、基于相似度定位方法定位精度較高,但依賴于定位環境,需要耗費大量人力采集標定數據,限制了這些方法的推廣應用;基于核嶺回歸定位只需要節點之間的信號強度和物理坐標信息,學習信號強度與物理坐標的回歸模型,并能在線動態更新模型參數,實現自適應免標定定位,但是依賴于多個節點。
目前,無線定位技術的兩個研究方向:擴大定位覆蓋范圍和提高定位精度。藍牙作為一種短距離的無線通信技術,發展成熟、價格便宜、 性價比高,并且已經成為移動設備上的標配。2010 年7月7日,藍牙技術聯盟宣布,正式采納藍牙4.0核心規范(Bluetooth Core Specification Version 4.0[4]),并啟動對應的認證計劃。藍牙4.0工作在2.4 GHz ISM頻段,并能夠通過自適應調頻技術避免與其他同頻段信號發生串擾,具有超低功耗、 3 ms 低延遲、 超過100 m的通信距離等優點。藍牙4.0相較于低版本藍牙具有不需要配對、準確、功耗極低的新特性,具有更長傳輸距離、更大傳輸帶寬的優勢以及更廣的覆蓋面積、亞米級的誤差等特點,顛覆了藍牙無線技術的應用范疇,帶來了更廣闊的無線定位應用前景。
藍牙4.0 標準規范提供了一些與位置估計相關的參數:RSSI值、鏈路質量(link quality,LQ)值、發送功率(transmit power level,TPL)、接收功率電平(received power level,RPL)[5]。RSSI值和距離之間存在著一定的類似于對數的對應關系,距離不同其RSSI 值不同。RSSI 值可以通過調用函數來獲取,而RPL則是從RSSI間接通過信號傳播模型轉換得到的,RPL是最適合計算距離的[6]。
本文基于藍牙4.0技術研究近距離定位問題,提出基于RPL的測距模型與三角質心定位模型結合的免標定定位算法,與基于RSSI的三角質心定位算法[7]進行對比,該算法能提高定位精度、降低定位復雜度以及成本。
本研究將RPL這個參數應用于定位算法。
1基于RPL的三角質心定位模型
1.1RPL的測距模型
對于藍牙設備,RSSI值通常用于使發射功率最小化,以接收到滿意的信噪比的信號。而基于接收功率的測距模型中,用于測量距離的參數是RPL,使用公式如式(1)所示

=PTX+GTX+GTR+40.2-10nlgd,
(1)
式中PRX為接收功率,dBm;PTX為發送功率,dBm;GRX和GTX為天線獲增益(dBi);c為光速,3.0×108m/s;f為中心頻率,2.44GHz;n為衰減因子,在自由空間為2 ;d為信標節點與目標節點直接的距離,m[8]。
RSSI是一個8位的整數,表示RPL是否黃金接收功率范圍(goldenreceiverpowerrange,GRPR)內(GRPR被認為是一種理想接收功率范圍 )。GRPR和RSSI在藍牙規范中定義的關系如圖1所示。
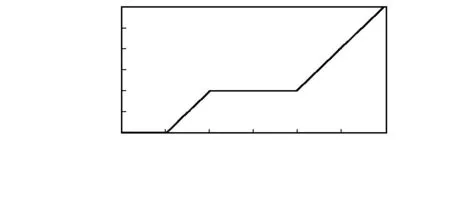
圖1 藍牙GRPRFig 1 Bluetooth GRPR
根據藍牙規范,正或負的RSSI分別表示設備的RPL是高于還是低于GRPR,而零意味著RPL在GRPR內。因此,RSSI被作為RPL的參數,而不是估計距離的參數。RPL是由RSSI間接計算得到,它們的關系如圖2所示。
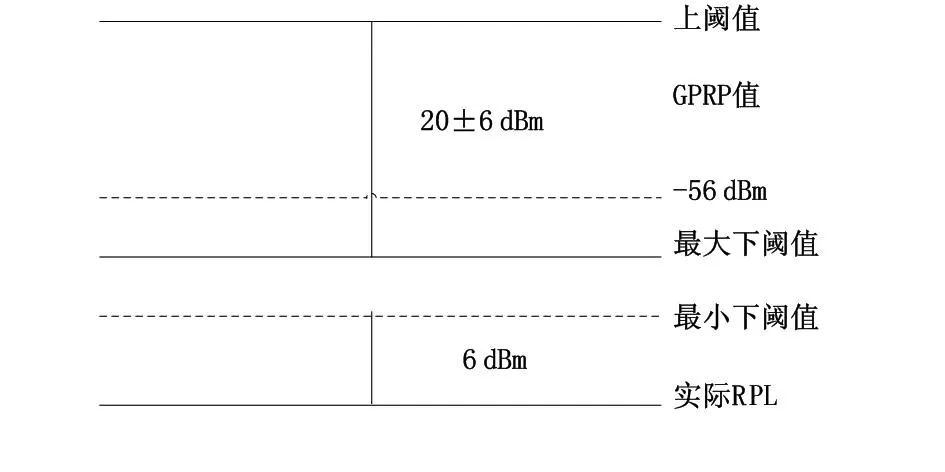
圖2 RPL與RSSI關系圖Fig 2 Relationship between RPL and RSSI
從圖2可知,上限閾值PU=-40 dBm,下限閾值PL=-60 dBm,當RPL正好落在GRPR內,RSSI為0。RSSI與RPL的轉換如式(2)所示
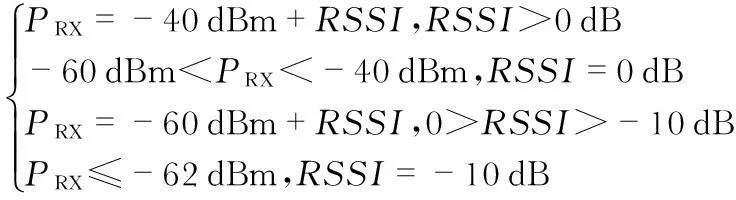
(2)
因此,信標節點與目標節點直接的距離d的計算方法如式(3)所示

(3)
其中,n取值2.15[8],PRX是由測得的RSSI值經過式(2)計算得出,天線增益[7]的和G =-5.34[8]如式(4)所示
G=GTX+GRX.
(4)
1.2三角質心定位算法模型
傳統三邊測量法如圖3所示,三個已知信標節點的坐標分別為A(xA,yA),B(xB,yB),C(xC,yC),目標節點 M坐標假設為(x,y ),目標節點到各信標節點之間的距離分別為rA,rB,rC,它們的關系如式(5)所示
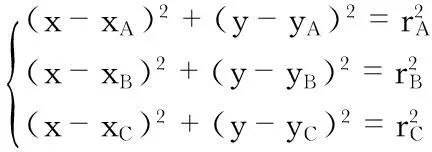
(5)
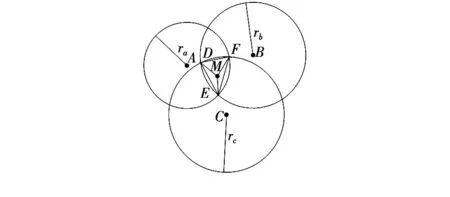
圖3 三邊測量法圖示Fig 3 Trilateration measurement method illustration
因為實際環境的復雜性,測量得到的接收信號強度總與實際情況下有誤差,換算出的信標節點到目標節點的距離r總是大于實際兩點間的距離[9]。所以,三邊測量法實際定位是以A,B ,C為圓心,rA,rB,rC為半徑畫圓,可得交疊區域,如圖4所示。三角形質心定位算法的基本思想是:計算三圓交疊區域的3 個特征點的坐標,以這三個點為三角形的頂點,目標節點即為三角形質心,特征點為E,F,G,特征點E點的計算方法如式(6)所示
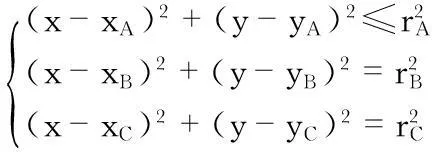
(6)
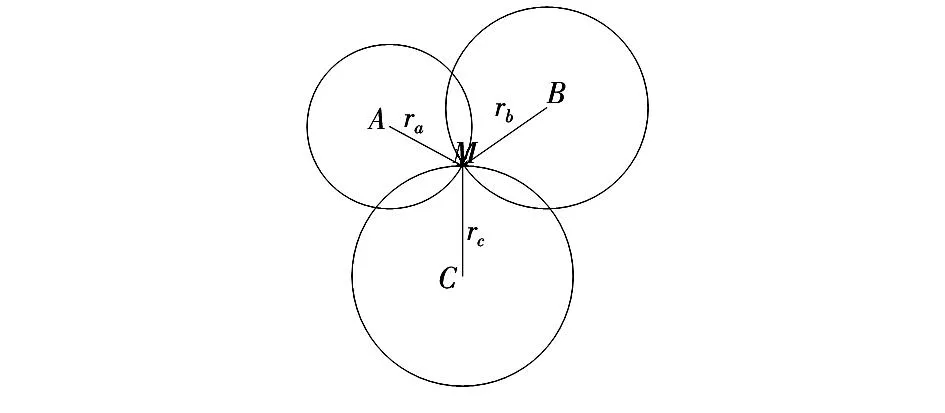
圖4 三邊測量法實際圖示Fig 4 Practical illustration of trilateration measurement method
2基于RPL的定位算法過程
2.1步驟
1)信標節點向周圍廣播信息,信息包括設備MAC地址,目標節點接收信息時獲取RSSI值,使用一階滯后濾波器對獲取到的RSSI進行濾波,如式(7)所示
RSSI=(1-α)·RSSI+α·RSSI′.
(7)
其中,α的取值范圍為(0~1),取值0.8。
2)將濾波得到的RSSI轉換為RPL,服務器計算目標節點在一定時間段內與信息來自同一信標節點之間的距離。
3) 在RPL值測距過程中,距離越近測距精度越高,RPL值越穩定越具有參考價值, 故將目標節點M 測到的所有d值從小到大進行排序,取最近的三個坐標點,依式(6)計算出3個交點的坐標,最后通過質心算法計算出目標節點的坐標。
2.2誤差定義
假設計算得到目標節點的坐標為(x,y),真實坐標為(x0,y0),定義定位誤差ER為

(8)
3實驗仿真
為了驗證本文提出方法的可行性,采用Matlab仿真工具進行模擬實驗。假設在10m×10m的正方形區域,在四個角落分別放置固定節點,坐標分別為A(0,0),B(10,0),C(10,10),D(0,10),固定節點即是信標節點。隨機產生10個目標節點。分別用基于RSSI的測距模型與基于RPL的測距模型進行測距仿真對比,以及基于RSSI的三角質心定位模型和基于RPL的三角質心定位模型進行定位仿真。
3.1測距模型對比實驗
為了得到目標節點和信標節點之間的距離與RSSI值、RPL值的關系,采用統計均值校正模型[10],如式(9)所示
(9)
以1 m為測量間距,并且進行20次測量取其平均值,r0取值為0,n取值為2,方差取值1,所測得數據如表1所示。
將基于RSSI的測距方法、基于RPL的測距方法測試結果進行對比,如圖6所示,基于RSSI的測距模型平均誤差為1.58 m,基于RPL的測距模型平均誤差為0.73 m,基于RPL的測距模型優于基于RSSI的測距模型。
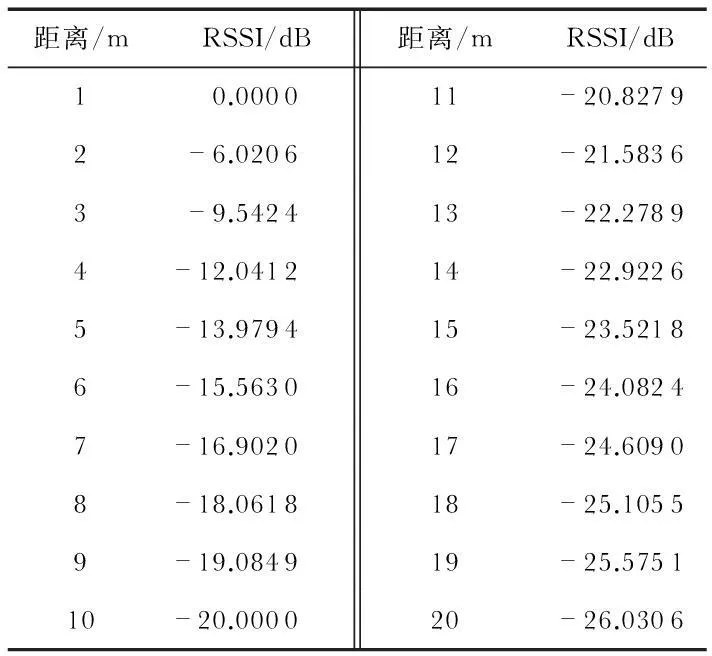
表1 仿真數據
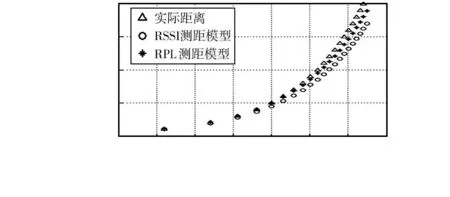
圖5 測距模型對比圖Fig 5 Ranging model comparison
3.2定位對比實驗
隨機生成10個點S1(2,3)m,S2(1,7)m,S3(3,5)m,S4(3,9)m,S5(5,5)m,S6(7,8)m,S7(8,6)m,S8(6,7)m,S9(9,5)m,S10(4,1)m,根據式(4)計算出目標節點與接入點之間的距離(n取2.15),分別選擇目標節點到固定節點最近的三個固定節點進行定位,定位結果如圖6所示。進行20次實驗,基于RSSI的三角質心定位平均誤差為0.61 m,基于RPL的三角質心定位平均誤差為0.25 m。
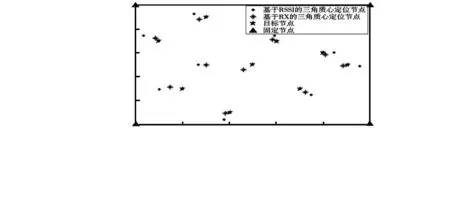
圖6 定位結果對比圖Fig 6 Positioning results comparison
4結束語
本文提出將基于RPL的測距模型與三角質心定位模型結合的免標定定位算法,實現高精度定位,避免復雜的人工標定過程,降低成本。通過仿真實驗將算法與基于RSSI的三角質心定位算法進行比較,實驗結果證明:本算法易實施,測距精度提高53.79 %,定位精度提高59.02 %。滿足無線傳感器網絡近距離定位的低成本、精度高的要求。
參考文獻:
[1]SubhanF,HasbullahH,RozyyevA,etal.IndoorpositioninginBluetoothnetworksusingfingerprintingandlaterationapproa-ch[C]∥2011InternationalConferenceonInformationScienceandApplications(ICISA),IEEE,2011:1-9.
[2]DiazJJM,R.MauesADe,SoaresRB,etal.Bluepass:Anindoorbluetooth-basedlocalizationsystemformobileapplicat-ion[C]∥IEEESymposiumonComputersandCommunications,2010:778-783.
[3]江德祥,胡明清,陳益強,等.基于核嶺回歸的自適應藍牙定位方法[J].計算機應用研究,2010,27(9):3487-3489,3492.
[4]SpecificationoftheBluetoothSystem(Version:4.0)[S].TheBluetoothSpecialInterestGroup,2010.
[5]SubhanF,HasbullahH,RozyyevA,etal.HandoverinBluetoothnetworksusingsignalparameters[J].InformationTechnologyJournal,2011,10(5):965-973.
[6]KotanenA,HannikainenM,LeppakoskiH,etal.ExperimentsonlocalpositioningwithBluetooth[C]∥ProcofInternationalConferenceonInformationTechnology:CodingandComputing,WashingtonDC:IEEEComputerSociety,2003:297-303.
[7]劉玉軍,蔡猛,高立恒,等.基于測距的傳感器節點質心定位修正算法[J].計算機測量與控制,2014,22(9):2860-2862.
[8]ShengZhou,PollardJK.PositionmeasurementusingBluetoo-th[J].IEEETransactionsonConsumerElectronics,2006,52(2):555 - 558.
[9]呂振,譚鵬立.一種基于RSSI校正的三角形質心定位算法[J].傳感器與微系統,2010,29(5):122-124.
[10] 萬國峰,鐘俊,楊成慧.改進的RSSI測距和定位算法[J].計算機應用研究,2012,29(11):4156-4157.
Triangle centroid close range localization algorithm based on RPL*
LU Yang-jie, LIU Zhi-qin, YANG Lei, CHAI Lin-xiang
(School of Computer Science and Technology, Southwest University of Science and Technology,Mianyang 621010,China)
Abstract:Aiming at problem of low precision of close range positioning of wireless sensor networks(WSNs),propose a calibration-free triangle centroid localization algorithm based on received power level(RPL).The algorithm uses argument of radio signals RPL to replace traditional argument received signal strength indication(RSSI),it is applied in ranging model,combined with traditional triangle centroid localization model,so as to achieve gools of reducing ranging error,improving positioning precision.Through simulation,compare triangle centroid localization algorithm based on RPL with triangle centroid localization algorithm based on RSSI,results show that under the experimental environment,the triangle centroid localization algorithm based on RPL improves precision of 59.02 % than the triangle centroid localization algorithm based on RSSI,positioning precision has been improved significantly.
Key words:close range localization; received power level(RPL); positioning; triangle centroid localization algorithm; wireless sensor networks(WSNs)
DOI:10.13873/J.1000—9787(2016)03—0137—03
收稿日期:2015—06—23
*基金項目:國家自然科學基金資助項目(61471306);西南科技大學研究生創新基金資助項目(14YCXJJ0054)
中圖分類號:TP 393
文獻標識碼:A
文章編號:1000—9787(2016)03—0137—03
作者簡介:
陸楊潔(1991-),女,四川樂山人,碩士研究生,主要研究方向為無線網絡、移動應用開發。