角加速度間接測量方法研究*
2016-06-13 08:45:15任如彬王皖君
傳感器與微系統 2016年3期
關鍵詞:卡爾曼濾波
付 晨, 任如彬, 王皖君
(南京林業大學 機械電子工程學院,江蘇 南京 210037)
?
角加速度間接測量方法研究*
付晨, 任如彬, 王皖君
(南京林業大學 機械電子工程學院,江蘇 南京 210037)
摘要:針對角加速度檢測的需求和直接檢測存在的問題,研究了間接測量方法。根據角加速度的積分是角速度,以角速度為信號源,運用卡爾曼濾波器估計角加速度。設計了實驗平臺,分別進行了角加速度階躍變化和周期性變化實驗,實驗結果表明:該間接測量方法具有很好的應用價值。
關鍵詞:角加速度; 卡爾曼濾波; 間接測量
0引言
角加速度檢測在動力機械動態試驗、伺服控制、負載模擬等領域中有著廣泛的需求[1~3]。目前有采用流動電勢法、壓電晶體法和應變片法設計傳感器直接測量角加速度,但還沒有成熟的定型產品[4]。通常動力機械的轉軸上都安裝轉速傳感器,理論上,可以對轉速微分實現角加速度間接測量,但數值微分運算會放大轉速信號中的噪聲,采用低通濾波處理,則會帶來相位滯后,造成動態測量誤差。為了提高角加速間接測量的精度和響應速度,擴張狀態觀測器、跟蹤微分器、卡爾曼濾波器、滑模觀測器等被用于估計角加速度[5~8]。其中,擴張狀態觀測器、跟蹤微分器的參數沒有明確物理意義,確定困難;卡爾曼濾波器通過遞推方程,根據當前量測數據,實時給出被估計量的動態變化規律,當狀態方程和測量方程為線性時,且量測噪聲為零均值高斯噪聲時,標準卡爾曼濾波是最小方差意義下的最優濾波算法,可以通過噪聲特性矩陣的選擇來調節狀態估計的收斂速度,并保持系統的穩定,有較好的應用前景,但主要集中在仿真分析,實驗研究比較少。
為了評估角加速度間接測量方法的有效性,本文以角速度為信號源,采用卡爾曼濾波器估計角加速度,設計實驗平臺,并進行實驗研究。實驗結果表明:該間接測量方法能有效估計角加速度,且成本低比,直接測量方法更容易實現。
1角加速度間接測量方法
角加速度定義為角速度對時間的微分

(1)
狀態空間表示為
y=Cx.
(2)
其中
用一階歐拉法把式(1)轉換為離散迭代形式,近似過程中的誤差可以用卡爾曼濾波器的反饋校正來補償
xk=xk-1+Axk-1Ts=(I+ATs)xk-1,
(3)
記
考慮狀態方程誤差和量測噪聲,被估計狀態的狀態方程和輸出方程為
(4)
過程噪聲w和量測噪聲v相互獨立,一般為均值為零的高斯白噪聲,它們的協方差矩陣如下
E(w)=E(v)=0,
E(vvT)=Ra=ra/Ts.
先驗估計誤差的協方差和估計誤差的協方差分別為


卡爾曼濾波的計算步驟如下

(5)

(6)

(7)

(8)

(9)
卡爾曼濾波通過遞推方程,根據當前量測數據,實時給出被估計量的動態變化規律,該方法的關鍵在于確定過程噪聲和量測噪聲的統計特性,工程上,通常采用試湊的方法確定Qa和Ra。
2實驗研究
為了獲取變化的轉速信號源和驗證角加速度間接測量方法的有效性,設計了調速電機實驗臺進行實驗研究,電機為變頻調速三相異步電機,額定轉速1 500 r/min,電機端部光電編碼器分辨率為2 000 p/r,以TwinCAT—PLC為實時控制器,通過Profibus—DP總線控制西門子S120變頻器,電機控制方式配置為帶編碼器閉環矢量控制,實現轉速的任意調節,轉速信號由實時控制系統通過現場總線讀取S120變頻器,間接測量方法的計算周期為1ms,數據采集和顯示由軟示波器(TwinCAT ScopeView)完成,實驗系統框圖如圖1所示,分別進行了角加速度階躍變化、周期性變化兩組實驗,并分析角加速度估計結果與理想角加速度的一致性。

圖1 實驗系統框圖Fig 1 Block diagram of experimental system
角加速度階躍變化實驗時,激活斜坡函數發生器,并分別設置加速時間為10s、減速時間為5s,則電機在變頻器控制下以恒定的角加速度做加速或減速運行,加速過程中角加速度從0階躍到15.7rad/s2、減速過程中的角加速度從0階躍到-31.4rad/s2。角加速度周期性變化實驗時,禁用斜坡函數發生功能,轉速給定信號以頻率為1Hz、幅值為200r/min正弦變化,由于轉速幅值或頻率再增加時,角加速度會很大,為防止機械沖擊、變頻器過載等故障出現,且實際應用中一般也不會出現這種工況,故沒有進行更大幅值或更高頻率的實驗[9]。實驗過程中主要采集轉速信號、估計的角加速度信號和近似的理想角加速度信號。由于實際轉速與給定轉速基本一致,但實際轉速含有一定的測量噪聲而數字給定信號除了量化誤差外基本不含噪聲,因此,通過對給定轉速進行差分運算獲得近似理想的角加速度。
卡爾曼濾波器參數q取0.0005、r取0.01時,角加速度階躍變化時的間接測量結果如圖2所示,在4.5s左右角加速度波動是由轉軸摩擦特性的變化造成的;角加速度周期性變化時的間接測量結果如圖3所示,從圖中可以看出,間接測量曲線基本與理想值重合。實驗結果表明:在選取合適的參數情況下,角加速度估計結果的相位滯后已經很小,能滿足多數應用要求。

圖2 角加速度階躍變化時的實驗結果Fig 2 Experimental results of angular acceleration step variation
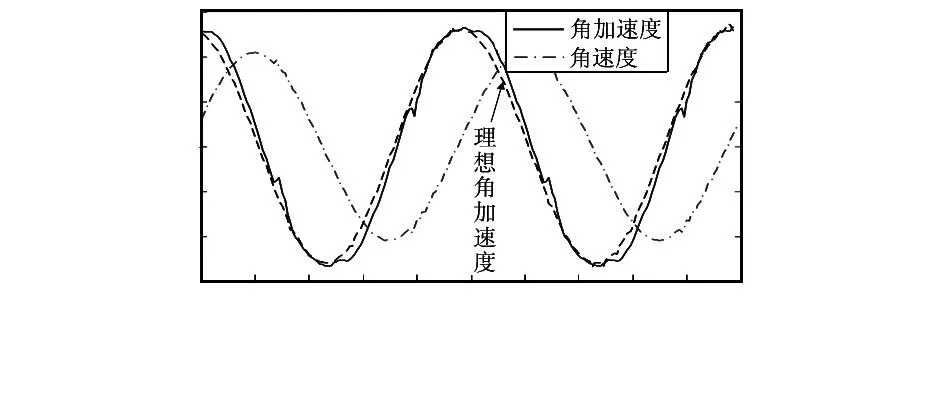
圖3 角加速度周期性變化時的實驗結果Fig 3 Experimental results of angular acceleration periodic variation
3結束語
本文實驗結果表明:基于卡爾曼濾波器的間接測量方法具有良好的動態估計性能和參數適應性,這是因為這種方法根據運動學規律來估計角加速度,參數確定與信號及其變化的范圍無關,適應性較強,而且算法實現簡單,具有很好的工程應用價值。
參考文獻:
[1]蔡艷平,李艾華,胡重慶,等.平穩小波自適應去噪用于曲軸瞬時角加速度測[J].振動、測試與診斷,2010,30(3):310-314.
[2]劉國福,張屺,王躍科.基于FIR濾波器的ABS輪加速度信號計算方法研究[J].武漢理工大學學報:交通科學與工程版,2006, 30(5): 902-904.
[3]郭鴻浩,周波,劉穎.永磁無刷直流電機角加速度估計[J].電工技術學報,2014,29(5):93-103.
[4]費維,劉正士,鄭傳榮.幾種角加速度傳感器的工作原理及其應用[J].機床與液壓,2005 (1):145- 146.
[5]李殿起,薛定宇,崔建國,等.一種新型的速度和加速度估計器[J].系統仿真學報,2008,20(15):4132-4135.
[6]張志利,李祥州,成躍.基于軸角編碼器二階跟蹤微分的角加速度測量[J].計測技術,2008,28(4):28-30.
[7]Han J D,He Y Q,Xu W L.Angular acceleration estimation and feedback control: An experimental investigation [J].Mechatro-nics,2007,17(9):1-9.
[8]鄧紅星,王憲彬,劉咔.角加速度邊界層觀測器設計[J].哈爾濱工業大學學報,2010,42(9):1504-1508.
[9]楊雪松,李長春,母東杰,等.正弦激勵法在傳感器校準中的新應用[J].傳感器與微系統,2014,33(7):154-156.
Research of angular acceleration indirect measurement method*
FU Chen, REN Ru-bin, WANG Wan-jun
(College of Mechanical and Electronic Engineering,Nanjing Forestry University,Nanjing 210037,China)
Abstract:In order to satisfy the requirement of angular acceleration measurement and solve the problem of direct detection,indirect measurement method is researched.As integration of angular acceleration is angular velocity,the latter is selected as signal source; Kalman filter is adopted to estimate angular acceleration.Experimental plat form is designed,step change of angular acceleration periodic change,and results indicate that the indirect measurement approach has good application value.
Key words:angular acceleration; Kalman filtering; indirect measurement
DOI:10.13873/J.1000—9787(2016)03—0030—02
收稿日期:2015—06—08
*基金項目:大學生實踐創新訓練計劃資助項目;南京林業大學高學歷人才科研啟動基金資助項目
中圖分類號:TN 41
文獻標識碼:A
文章編號:1000—9787(2016)03—0030—02
作者簡介:
付晨(1994-),男,江蘇蘇州人,主要研究領域為檢測技術與儀器。
王皖君,通訊作者,E—mail:wwjseu@qq.com。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36