基于ADAMS的某自動機加速機構動力學仿真
2016-05-28 02:41:58劉坤杰周克棟
兵器裝備工程學報 2016年4期
劉坤杰,周克棟,赫 雷
(南京理工大學 機械工程學院,南京 210094)
?
基于ADAMS的某自動機加速機構動力學仿真
劉坤杰,周克棟,赫雷
(南京理工大學 機械工程學院,南京210094)
摘要:提出了一種自動機加速機構,用于自動武器在研發過程中的非射擊系統聯調。基于多剛體動力學理論,運用SolidWorks和ADAMS軟件聯合建立了虛擬樣機模型。采用ADAMS軟件作為仿真平臺,針對該加速機構的工作原理與結構特點建立仿真策略并進行了仿真計算與分析,確定了主要的結構參數和電機轉速,并獲得了自動機的模擬加速曲線,實現了預期的設計目標,驗證了該加速機構的可行性與合理性。
關鍵詞:ADAMS; 動力學仿真; 自動機;加速機構
自動機利用火藥燃氣能量完成自動循環的方法和形式叫做自動武器自動方式,完成自動動作的方式是多樣的,主要分為槍機后坐式、槍管后坐式、導氣式與混合式[1]。以往,一種武器在生產定型之前必須要到靶場進行實彈射擊試驗,檢驗其各項性能,大量重復的試驗導致了低下的效率和較差的經濟效益。對未定型的自動武器進行模擬試驗,這樣就能夠大幅度減少實彈試驗次數和試驗經費[2]。模擬試驗的方法很多,其試驗效果有好有差,需要對其進行綜合評價[3]。
本研究提出了一種新型自動機加速機構,用于在不進行實彈射擊的情況下,由電動機代替火藥燃氣驅動自動機運動,將外動力作用于自動機[ 4],使自動機在規定時間內達到規定速度,完成開啟彈膛、退殼(模擬彈)、輸送槍彈(模擬彈)、送彈(模擬彈)進膛、關閉彈膛等一系列循環動作,模擬自動機運動。
該機構采用撞擊的方式實現自動機的快速加速,利用動力學仿真軟件ADAMS可以較方便地求解剛性體的碰撞問題[5]。采用傳統研究方法進行論證研究成本高、難度大[6]。本研究以動力學仿真軟件ADAMS作為仿真平臺[7],將虛擬樣機技術運用到該加速機構的動力學研究中,建立了虛擬樣機模型,通過仿真計算確定了其主要結構參數和電機轉速,得出了自動機的模擬加速曲線,為該套系統的后續設計提供了理論基礎。
1自動機加速機構工作原理
自動機加速機構工作原理框圖如圖1,系統的傳動機構為曲柄滑塊機構,將動力源的旋轉運動轉換為所需的線性運動,執行機構為撞擊模塊,撞擊模塊的原理如圖2所示。
撞擊模塊由滑塊、撞塊和緩沖簧組成,緩沖簧整體裝在滑塊內,兩端分別與撞塊和滑塊接觸,撞塊右端用于撞擊拉機柄,撞塊與滑塊之間相對滑動使緩沖簧壓縮,當其壓縮量達到L后,滑塊與撞塊發生碰撞。

圖1 加速機構總體方案框圖
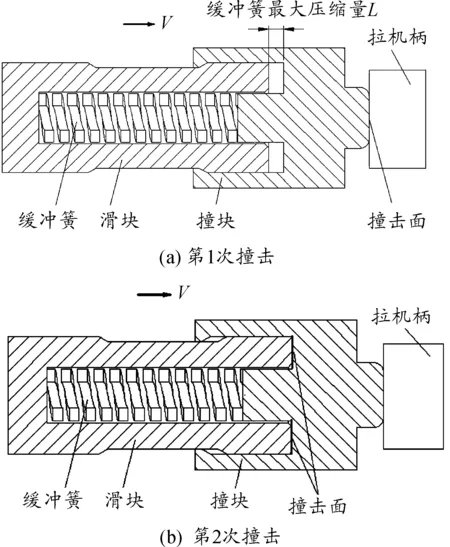
圖2 撞擊模塊原理框圖
工作原理如下:
1) 第一次剛性碰撞:運動的撞塊與靜止的自動機碰撞,使自動機獲得一定的初速度,如圖2(a)所示;
2) 緩沖簧被壓縮過程:由于滑塊速度大于自動機速度,緩沖簧被壓縮,自動機在撞塊推力作用下繼續加速,且加速度逐漸增大;
3) 第二次剛性碰撞:當緩沖簧達到最大壓縮量時,滑塊與撞塊發生碰撞,使自動機繼續加速,如圖2(b)所示;
4) 緩沖簧恢復原長過程:隨著滑塊速度的減小與自動機速度的增大,最終滑塊速度會小于自動機速度,因此緩沖簧有恢復原長的趨勢,由于緩沖簧力大于復進簧力,所以自動機會繼續加速,且加速度逐漸減小,直至與撞塊分離;
第2)、3)、4)階段中,撞塊與自動機具有相同的速度。
2建立加速機構虛擬樣機模型
2.1簡化模型的建立
用SolidWorks軟件建立加速機構的三維模型,并作如下簡化:① 將自動機組件視作一個整體,不考慮彼此間的相互運動;② 省略自動機中不運動的構件。然后將其保存為Parasolid格式導入到ADAMS中,定義每個零件的名稱、材料密度、顏色等相關屬性。建模過程中,在考慮構件之間運動及受力作用的前提下,遵循從簡到繁,由局部到整體的原則進行分析[8]。
2.2添加約束和碰撞接觸
將三維模型導入ADAMS后,需要根據實際情況對各零件施加約束,在具有相對運動的兩構件之間添加相應運動副和接觸,該樣機中共含有15個剛體,10個固定副,3個旋轉副,3個移動副,定義了4處碰撞,分別是撞塊與自動機、撞塊與調節桿、自動機與其兩側的擋塊,采用Impact函數[9]定義碰撞接觸。對于非旋轉體的碰撞,剛度系數可采用ADAMS的官方推薦值即默認值進行計算[4]。虛擬樣機模型如圖3所示。
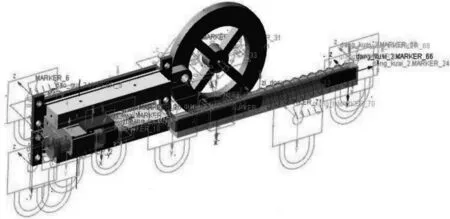
圖3 ADAMS虛擬樣機模型
2.3彈簧的定義
在導桿與調節桿之間定義緩沖簧,Stiffness Coefficient根據表1而定,Damping Coefficient設為0,Preload設為0,其他選擇默認值。在自動機與其右側的擋塊之間定義復進簧,Stiffness Coefficient設為0.2262N/mm,Damping Coefficient設為0,Preload設為34.3 N,其他選擇默認值。
2.4添加驅動
在曲柄回轉中心添加旋轉驅動,為避免轉速突變,驅動函數設置為:step(time,0,0,0.002,6540d)+step(time,0.002,0,0.06,0),其中,對于不同的緩沖簧剛度和壓縮量,6 540d(d表示(°)/s)不是一個定值,需在仿真過程中不斷調整ADAMS仿真與結果分析。
3仿真與分析
3.1機構主要參數初選
該機構中,緩沖簧剛度和最大壓縮量是影響撞擊效果的兩個重要參數,本文通過不斷改變這兩個參數,進行大量的仿真進行對比,從而確定最佳參數。緩沖簧剛度和壓縮量初選過程如下:
要求自動機速度在不大于5 ms內達到不小于9 m/s,并且撞塊與拉機柄之間的撞擊力盡量小,減少拉機柄的磨損。
假設為勻加速過程,則驅動力:
其中:m自為自動機質量;m自=0.400 5 kg。
3.2動力學仿真結果與分析
對其剛度和壓縮量進行分配并分別進行仿真,在仿真過程中,由于L和k的變化,為保證自動機最大速度為9m/s,每組仿真的曲柄轉速有所不同。導出自動機速度及撞塊與自動機之間的撞擊力數據(16組)并導入Matlab軟件進行分析處理,得到各自的最大撞擊力F和相應的加速時間t,結果如表1所示。各撞擊力曲線如圖4所示。
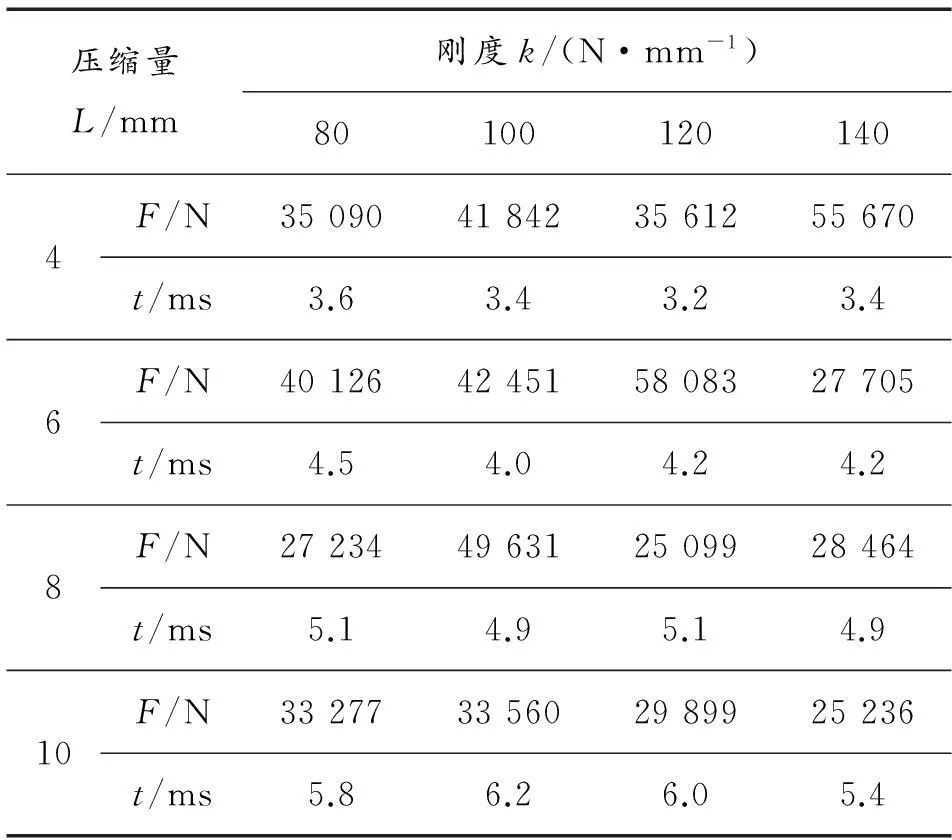
表1 不同剛度和壓縮量時的最大撞擊力和
由表1可以看出:① 緩沖簧最大壓縮量越大,則自動機加速時間越長,當L≥8 mm時,自動機加速時間逐漸接近直至超過5 ms;② 當L=6 mm,k=140 N/mm時,撞擊力取得最小值27 705 N,此時自動機加速時間為4.2 ms。
圖4中每條曲線的兩個尖峰分別代表兩次撞擊的撞擊力,對比16條曲線可以發現:①L不變時,隨著k的增大,第二次撞擊力逐漸減小;②k不變時,隨著L的增大,第二次撞擊力逐漸減小;③ 當L=10 mm,k≥100 N/mm時,第二次撞擊消失;④ 雖然L=6 mm,k=140 N/mm時撞擊力最小,但第一、二次撞擊力的差值較大,這就造成其中一次撞擊力過大,而另一次作用甚微,導致自動機加速時間和所受應力增大。
拉機柄的直接驅動力來自于剛性碰撞力和緩沖簧力,因為要求拉機柄被撞擊后的速度是一定的,根據能量守恒定律可知,緩沖簧力(由k和L決定)的增大必然導致剛性碰撞力的減小,這就很好地解釋了圖4中撞擊力的變化。同時,由于緩沖簧力遠小于剛性碰撞力,緩沖簧力作用時間越長會導致自動機加速時間越大,為保證自動機加速時間小于5 ms,又需要降低k和L。因此,應在L=6 mm,k=140 N/mm的基礎上適當減小L和k,重新分配彈簧剛度和壓縮量后,其剛度、壓縮量以及仿真結果如表2所示。
其中L=7 mm的仿真結果是為了對比分析。各撞擊力曲線如圖5所示。
由表2和圖5可以看出:當L=5 mm,k=100 N/mm時,撞擊力最小為26 028 N,自動機加速時間為3.7 ms,且第一、二次撞擊力大小相當,滿足要求,該加速機構的設計是可行且合理的。
這種情況下,撞擊時電機轉速為6 540 °/s,即1 090 r/min,自動機加速曲線如圖6所示,從其中可以明顯地看出其加速的4個過程。

表2 不同剛度和壓縮量時的最大撞擊力和

圖4 第一次分配的撞擊力曲線

圖5 第二次分配的撞擊力曲線
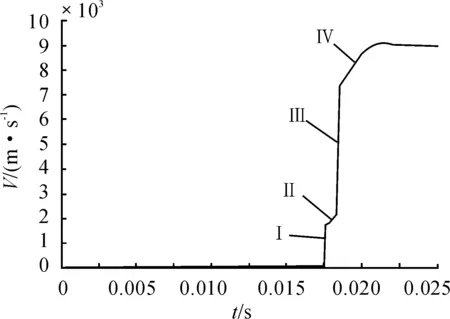
圖6 自動機被撞擊后的加速曲線
3結論
運用SolidWorks和ADAMS軟件聯合建立了某自動機加速機構的虛擬樣機模型,針對該加速機構的工作原理與結構特點建立仿真策略并進行了大量仿真計算,然后對各組數據進行了分析對比,確定了其最佳的結構參數和電機轉速,為該套系統的后續設計提供了理論基礎。
參考文獻:
[1]王裕安,徐萬和,薄玉成.自動武器構造[M].南京:南京理工大學,2005.
[2]董少峰.電動式自動機模擬試驗技術[D].太原:中北大學,2007.
[3]彭濤,王學軍,梁瑞濤.火炮模擬試驗方法及綜合評價[J].四川兵工學報,2009,30(10):100-103.
[4]江君.某自動機工作可靠性模擬試驗裝置關鍵技術研究[D].南京:南京理工大學,2012.
[5]謝最偉,吳新躍.基于ADAMS的碰撞仿真分析[C]//第三屆中國CAE工程分析技術年會論文集.大連:[出版社不詳],2007:339-342.
[6]王靖亞,周克棟,赫 雷,等.某外能源自動武器虛擬樣機技術研究[J].計算機仿真,2013,30(10):27-31.
[7]李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2014.
[8]李仁杰,馬吉勝,鄭海起.某高炮自動機虛擬樣機仿真[J].四川兵工學報,2009,30(6):69-71.
[9]袁點,王剛.基于ADAMS的槍機碰撞力研究[J].機械工程與自動化,2013,2013(4):62-64.
(責任編輯唐定國)
本文引用格式:劉坤杰,周克棟,赫雷.基于ADAMS的某自動機加速機構動力學仿真[J].兵器裝備工程學報,2016(4):61-65.
Citation format:LIU Kun-jie, ZHOU Ke-dong, HE Lei.Dynamics Simulation of an Accelerating Mechanism of Automat Based on ADAMS [J].Journal of Ordnance Equipment Engineering,2016(4):61-65.
Dynamics Simulation of an Accelerating Mechanism of Automat Based on ADAMS
LIU Kun-jie, ZHOU Ke-dong, HE Lei
(School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China)
Abstract:An acceleration mechanism of automat was proposed for the joint debugging of system under non-shooting condition during the development process of automatic weapons. A virtual prototype model was established by SolidWorks and ADAMS software based on the theory of multi-rigid-body dynamics. Aiming at the working principle and structural characteristics of the acceleration mechanism, a simulation strategy was proposed and the simulation calculation and analysis were conducted with ADAMS software as the simulation platform. The main structural parameters and the motor speed were determined and the simulation acceleration curve of the automat was obtained. The expected design goal was achieved and the feasibility and rationality of the acceleration mechanism were validated.
Key words:ADAMS; dynamics simulation; automat;accelerating mechanism
文章編號:1006-0707(2016)04-0061-06
中圖分類號:TJ202
文獻標識碼:A
doi:10.11809/scbgxb2016.04.016
作者簡介:劉坤杰(1991—),男,碩士研究生,主要從事機械設計與仿真研究;周克棟(1964—),男,教授,博士生導師,主要從事武器系統與運用工程研究;赫雷(1973—),女,副教授,碩士生導師,主要從事火炮、自動武器與彈藥工程研究。
收稿日期:2015-10-11;修回日期:2015-11-11
【機械制造與檢測技術】
