橫向磁通電機控制器驅動及緩沖電路設計
2016-05-25 00:37:35候書寒李紅梅周亞男姚宏洋
微特電機 2016年5期
關鍵詞:信號
候書寒,李紅梅,周亞男,姚宏洋
(合肥工業大學,合肥 230009)
橫向磁通電機控制器驅動及緩沖電路設計
候書寒,李紅梅,周亞男,姚宏洋
(合肥工業大學,合肥 230009)
采用MOSFET作為功率器件,設計實現了針對橫向磁通電機的功率驅動電路。該電路采用光耦HCPL4504和專用驅動芯片UCC27321,具有外圍電路簡單可靠的特點;同時,為了抑制MOSFET兩端出現的電壓尖峰,設計了RCD緩沖電路。詳細闡述了橫向磁通電機驅動方案的整體結構、驅動電路設計以及關鍵參數的計算流程。最后,開展了900 W橫向磁通電機驅動電路及緩沖電路的實驗測試工作,通過試驗測試驗證所設計的驅動電路及緩沖電路的實用性和有效性。
橫向磁通電機;MOSFET;驅動電路;UCC27321;RCD緩沖電路
0 引 言
與傳統的電勵磁電機相比,橫向磁通電機具有轉速低、轉矩密度高、電磁解耦、控制方便等特性,特別適合于低速驅動及大轉矩領域。由于其低速特性優良及結構形式多樣等諸多優點,橫向磁通電機得到越來越多的關注,應用領域也從大功率的磁懸浮列車、艦船電力推動等到小功率的電動車驅動不斷擴展[1]。隨著電力電子技術的發展, IGBT、MOSFET 等功率開關器件已逐步取代晶閘管(SCR)為主的功率開關器件,同時正朝著高性能、模塊化、小型化的方向發展[2]。
目前,IGBT作為電機驅動的功率器件,電壓等級較高,多用于大功率場合。將IGBT用于小功率的電動車領域,必然造成較大的功率冗余,而且IGBT驅動電路體積大、成本高,不利于產業化實現。相比于IGBT,MOSFET則在小功率場合表現更為突出,在低壓、大電流領域更是MOSFET的強項,恰恰能夠解決IGBT在小功率場合的一系列問題。
為此,針對48 V供電的900 W橫向磁通電機驅動系統,本文建議采用低電壓、大電流的MOSFET作為功率器件,設計MOSFET為功率器件的橫向磁通電機控制器驅動電路以及抑制MOSFET兩端電壓尖峰振蕩的RCD緩沖電路,并通過試驗驗證設計的驅動電路和緩沖電路的實用性和有效性。
1 MOSFET驅動電路基本要求
MOSFET驅動電路是電機控制器控制電路和功率主電路之間的接口,設計性能良好的驅動電路可以使MOSFET工作在比較理想的狀態,這對電機運行效率、可靠性和安全性都十分重要,MOSFET驅動電路應滿足以下基本要求[3]:
(1) 柵極驅動電壓合適,一般以10~15 V為宜;
(2) 驅動電路應能提供足夠大的電流,以保證MOSFET快速開通且不存在上升沿的高頻振蕩;同時,驅動電路能提供低阻抗的通路,以保證MOSFET快速關斷,盡量減小MOSFET的開關損耗;
(3) 具有合適的柵極(串聯)驅動電阻和合適的柵源(并聯)電阻(一般為數百至數千歐姆),以保證MOSFET動態驅動效果和防靜電效果;
(4) 驅動電路應能實現控制電路和功率主電路間的電氣隔離,保證電機控制器的安全可靠;
(5) 盡可能較少驅動電路輸入與輸出信號延時,減小系統響應的滯后;
(6) 電路結構簡單、安全可靠,成本低,且具有很強的抗干擾能力。
2 驅動方案設計及器件選型
2.1 驅動電路總體方案設計
900 W橫向磁通電機控制器功率主電路如圖1所示,控制信號開關頻率f=10 kHz。
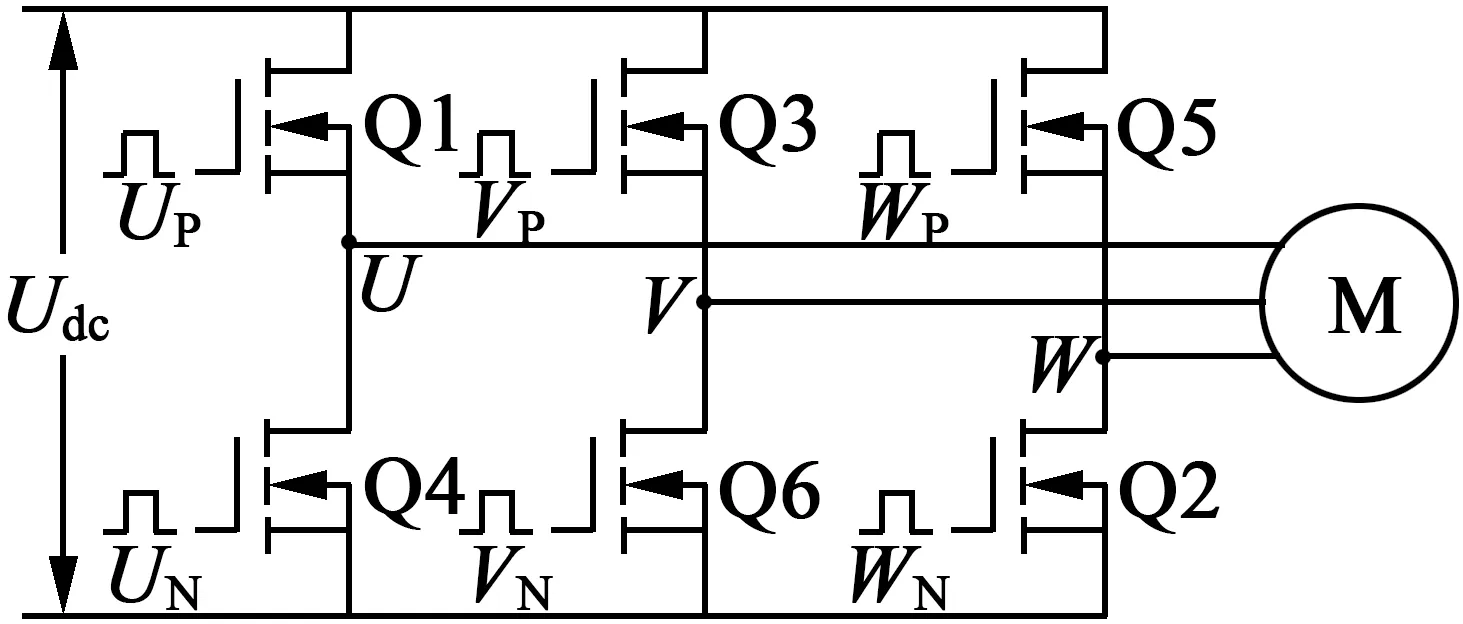
圖1 橫向磁通電機控制器全橋功率主電路
電機控制器驅動方案如圖2所示,由光耦隔離電路、驅動信號放大電路、全橋功率驅動電路三部分組成[4]。Umodel表示光耦隔離電路和驅動信號放大電路供電電源,Udc表示電機控制器直流母線電壓。電機控制器控制電路輸出的六路PWM信號通過光耦隔離和放大后,輸出六路驅動信號UP,VP,WP,UN,VN,WN,驅動全橋功率主電路實現對橫向磁通電機的控制。
2.2 驅動電路器件選擇
2.2.1 MOSFET選型
MOSFET的選型要兼顧實用、安全及其可靠性等,其選型原則可借鑒文獻[5]。針對Udc為48 V,功率為900 W橫向磁通電機,電機額定電流幅值為27 A,選擇型號為MM300FF15T2HD的MOSFET功率模塊,它能承受的最大漏極-源極電壓為150 V,最大漏極直流電流為300 A,具有較低的導通電阻、快速的開關能力和較寬的工作溫度范圍,符合設計所需。
2.2.2 光耦及驅動芯片的選擇
專用集成驅動芯片集性能穩定、集成度較高和電路比較簡單的優勢于一體,考慮已完成選型的MOSFET所需要的驅動能力及應用環境,選擇光耦隔離芯片HCPL4504和專用驅動芯片UCC27321[6]。
3 驅動電路設計及參數計算
3.1 驅動電路設計
圖3是電機控制器U相上管驅動電路,該電路基于HCPL4504和UCC27321芯片設計,其中,光耦芯片HCPL4504實現隔離,驅動芯片UCC27321作信號放大。兩個芯片的輸入輸出均是反邏輯,因此整個驅動電路的輸入輸出仍是正邏輯關系,即當輸入控制信號為高電平時,驅動輸出高電壓開通信號;當輸入控制信號為低電平時,驅動輸出低電壓關斷信號。
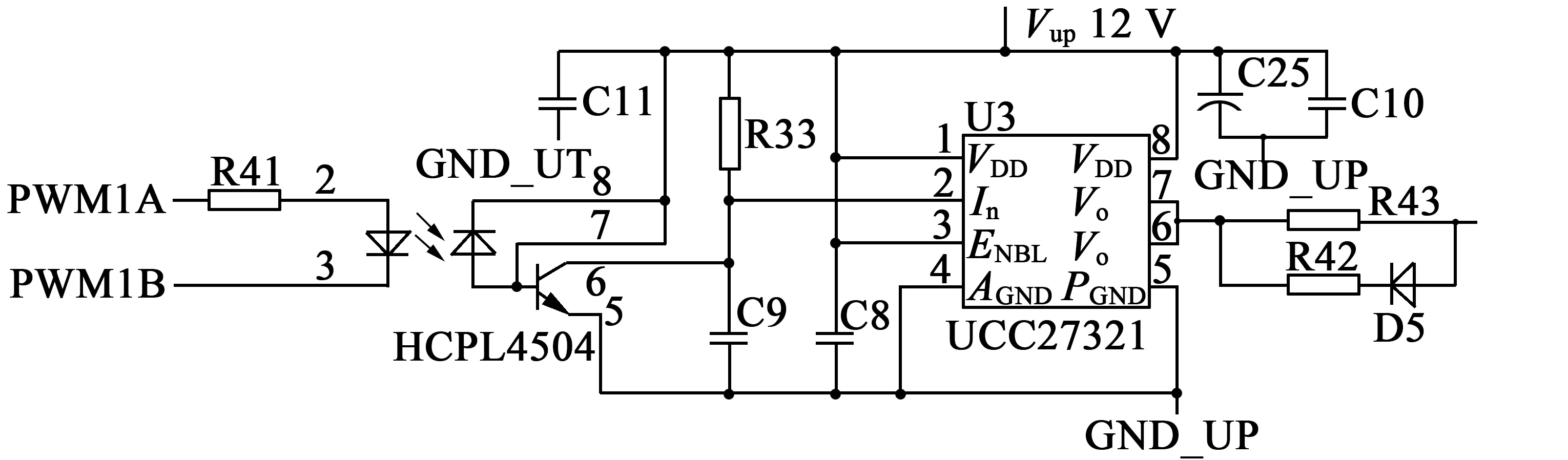
圖3 電機控制器U相上管驅動電路
光耦HCPL4504和驅動芯片UCC27321選擇+12V電源供電,光耦輸入端源自DSP輸出的PWM信號,接入電阻R41=220 Ω,輸出側接上拉電阻R33=4.7 kΩ,二者用于匹配光耦的電流傳輸比(CTR),5腳和6腳之間跨接C9=100 pF的去噪電容,6腳輸出信號接驅動芯片UCC27321的輸入端2腳,引線長度小于2 cm。芯片電源端接入100 μF電解電容,使電源和地之間解耦,并能在驅動過程中提供功率管所需的驅動電流,接入貼片電容C10=C11=1 μF,濾除電源高頻噪聲。
為使驅動芯片UCC27321一直保持工作,3腳使能端接+12V電源,使其始終高電平有效。并在1腳和4腳間接100 nF的貼片電容,以降低輸出阻抗。為保證功率管較快的開關速度、較小的開關損耗,并防止開關時的浪涌電壓導致其誤觸發,設置了合適的柵極電阻R43=10 Ω,R42=27 Ω,MOSFET開通時R43起作用,關斷時R43和R42并聯起作用,控制MOSFET的關斷速度。為了保護功率管,減小輸入阻抗,提高抗干擾性能,給柵源電荷的泄放提供通路,柵極和源極間跨接電阻R66=10 kΩ。
U相下管和其它相的驅動電路設計完全相同,不再贅述。
3.2 驅動參數計算
(1) 電源功率計算
MOSFET在開關過程中需要消耗來自柵極驅動電源的功率,同時驅動電路的芯片也需要電源供電,為確保驅動電路穩定可靠工作,供電電源應能輸出穩定電壓且具有足夠的功率。
MOSFET驅動輸出的平均電流表達式:
(1)
式中:Qg為MOSFET的柵極電荷;f表示MOSFET的開關頻率。
驅動輸出功率計算公式:
(2)
式中:Vdrive為柵極驅動電壓。
至于光耦HCPL4504及驅動芯片UCC27321的功率需求,可查閱手冊獲得,其中PHCPL=100 mW,PUCC=650 mW。
(2) 驅動電阻計算
MOSFET的開通和關斷是通過柵極電路的充放電來實現的,因此柵極驅動電阻Rg的大小會影響柵極電容的充放電速度,因而對MOSFET的開關特性產生極大的影響。
當Rg較大時,可抑制柵極信號前后沿的陡度并防止振蕩,減小MOSFET柵極的尖峰電壓;但當Rg過大時,MOSFET開關時間必然延長,開關損耗加大,其最大值表達式:
(3)
式中:Tr為驅動電路輸出信號上升沿和下降沿。
取Tr=0.01T,T=100 μs,則Tr=1 μs。輸入電容Ciss參考MOSFET模塊手冊,取21 nF,經計算,Rg<15.9 Ω。
當Rg較小時,能夠減小MOSFET的開關時間,降低開關損耗;但Rg太小時,驅動回路雜散電感與MOSFET輸入電容會形成欠阻尼,導致MOSFET柵源極之間的振蕩,引起柵極的尖峰電壓,嚴重時損壞MOSFET。其最小值表達式:
(4)
式中:L0為柵極回路雜散電感。
L0一般為20 nH,經計算得Rg(on)min>1.95 Ω。
4 RCD緩沖電路設計
由于實際電路中雜散電感的存在,MOSFET關斷時較高的di/dt將在其兩端引起電壓尖峰,對MOSFET的安全運行帶來極大的威脅。為保證電路的安全可靠性,設計了如圖4所示的RCD緩沖電路,其參數計算過程如下[7-8]。
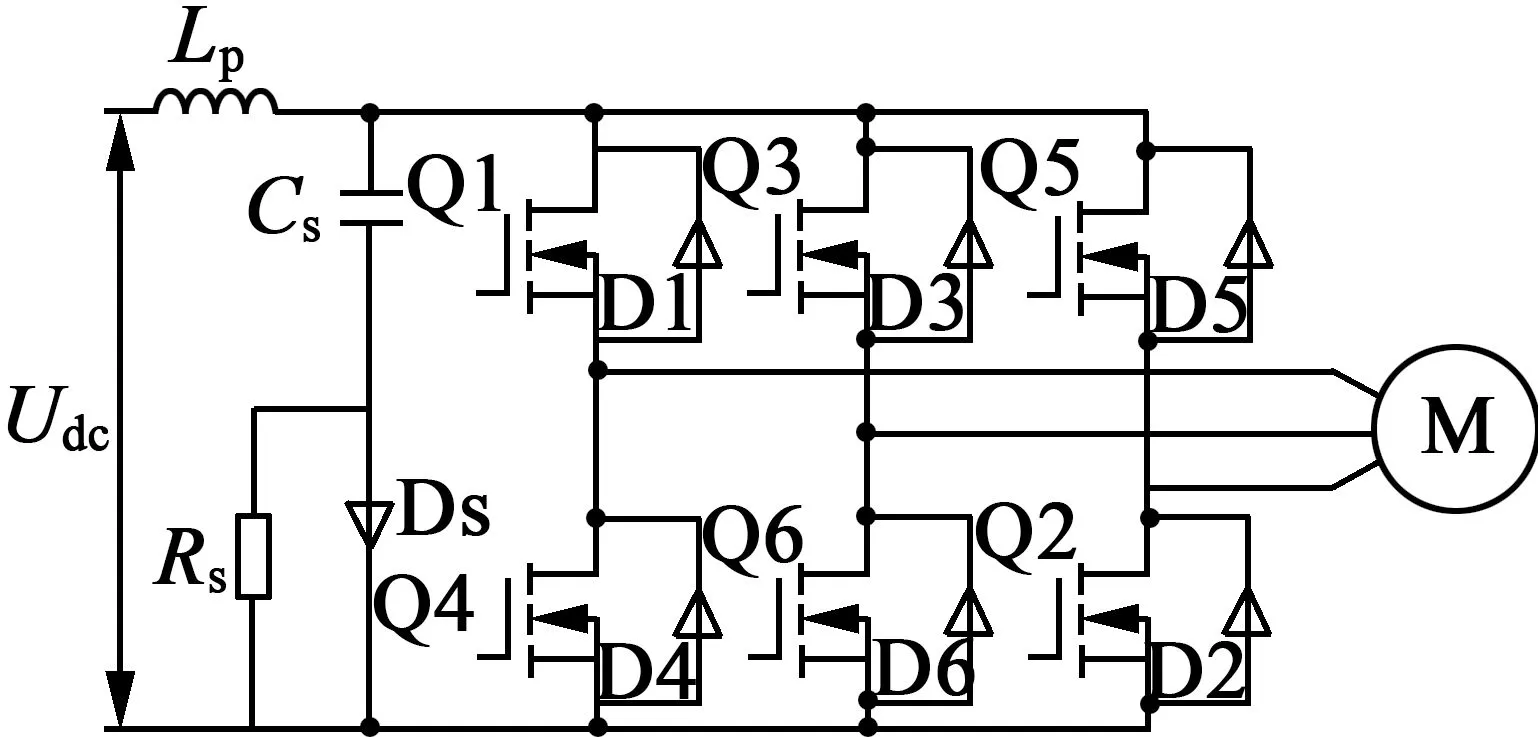
圖4 電機控制器主電路及緩沖電路
4.1 確定緩沖電容Cs容量
緩沖電容容量計算公式:
(5)
式中:IL為母線電流;L=LP+LS,LP為主回路雜散電感,LS為緩沖回路寄生電感;Δu為過電壓保護度,一般設定為15%。
緩沖電容Cs的耐壓值過小會給主回路帶來安全隱患,其最小耐壓值應為主回路中功率模塊所承受的額定電壓值。此外,還需注意的是,緩沖電容應選擇無感電容,安裝時引線應盡量短,并且盡量靠近功率模塊。4.2 確定緩沖電阻Rs
緩沖電路應保證在每次MOSFET關斷前緩沖電容Cs中的電荷完全被釋放,緩沖電阻Rs則為其提供能量釋放的通道。緩沖電阻Rs的計算公式:
(6)
同樣,緩沖電阻也需要選擇無感電阻。
4.3 確定緩沖二極管Ds
首先,緩沖二極管耐壓值應與MOSFET額定電壓相當。其次,緩沖二極管的瞬態正向電壓下降是MOSFET關斷時發生尖峰電壓的原因之一。此外,緩沖二極管的選型應注意反向恢復特性,較長的反向恢復時間使二極管在高頻動作時損耗增加,同時,緩沖二極管急劇的反向恢復過程在MOSFET的漏源極間引起電壓大幅度振蕩。綜上所述,緩沖二極管應選擇電壓容量合適、瞬態正向電壓低、反向恢復時間短且反向恢復平順的緩沖二極管。
5 實驗測試
基于MOSFET為功率器件的橫向磁通電機控制器驅動電路以及RCD緩沖電路設計及元器件選型及參數確定的基礎上,制作完成了橫向磁通電機控制器,并對驅動電路和緩沖電路性能進行實驗測試。驅動電路邏輯測試結果如圖5所示,其中CH4為控制信號波形,開關頻率為10 kHz;CH3為驅動電路輸出波形,可以看到驅動信號與控制信號邏輯相同,頻率與占空比均未發生改變,且具有快速的上升沿和下降沿,MOSFET能夠可靠開通和關斷。
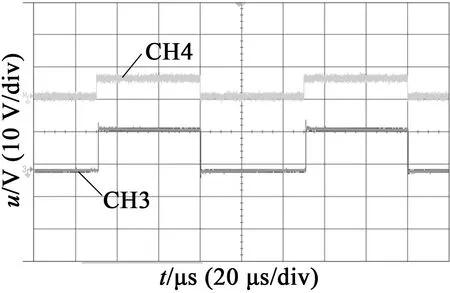
圖5 驅動電路輸入、輸出波形
圖6為驅動電路帶載測試波形。測試條件為Udc=48 V,Iin=27 A,給定控制信號占空比分別為3%,18%,47%,74%。觀察MOSFET柵極的驅動信號波形UGS及漏-源極波形UDS。CH1為MOSFET驅動電路的輸出波形UGS,CH2為MOSFET漏源極波形UDS,匹配設計的RCD緩沖電路,漏源極尖峰電壓不超過60 V,試驗結果表明:在建議的驅動方案下,結合匹配設計的RCD緩沖電路,MOSFET驅動電路能正常可靠地工作。
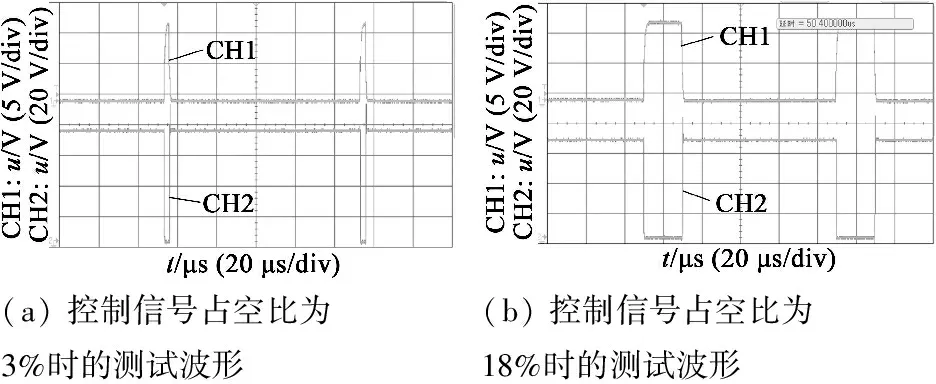
(a)控制信號占空比為3%時的測試波形(b)控制信號占空比為18%時的測試波形
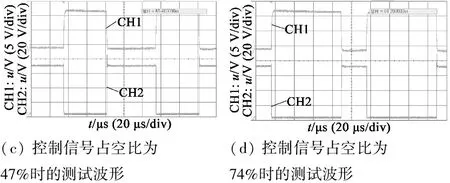
(c)控制信號占空比為47%時的測試波形(d)控制信號占空比為74%時的測試波形
圖6 驅動電路帶載測試的輸入、輸出波形
6 結 語
針對低電壓大電流的橫向磁通電機,匹配設計了基于MOSFET的電機驅動電路,該電路采用高速光耦芯片及集成驅動芯片,外圍電路結構簡單、運行安全可靠。同時,設計的RCD緩沖電路可以抑制MOSFET關斷時的尖峰電壓,為橫向磁通電機控制器驅動電路穩定可靠的工作提供了良好的保證,試驗結果表明:針對900 W橫向磁通電機設計的驅動電路及與之匹配的緩沖電路能夠確保橫向磁通電機控制器功率主電路中MOSFET安全可靠的開通和關斷。
[1] 蘇士斌, 史儀凱, 袁小慶,等.橫向磁通電機研究綜述[J].電子學報,2013,41(11):2290-2296.
[2] 綦慧,戴鵬飛.永磁同步電機驅動器的研制[J].電氣傳動,2010,40(10):28-31.
[3] 王兆安,劉進軍.電力電子技術[M].北京:機械工業出版社,2011.
[4] 談振藩, 林榮森, 王洪波,等.基于CPLD 的直流無刷電機驅動電路設計[J].現代電子技術,2008,31(8):4-6.
[5] 王毅.功率MOSFET的失效分析及其驅動設計[D].武漢:武漢理工大學,2014.
[6] 胡發煥,邱小童,蔡咸健.基于場效應管的大功率直流電機驅動電路設計[J].電機與控制應用,2011,38(4):21-24.
[7] 余向陽,余娟,鄭湘渝.B 型緩沖電路用于MOSFET 逆變器的仿真分析[J].現代電子技術,2005,28(12):85-89.
[8] 周永明.逆變橋緩沖電路應用研究與軟開關技術探討[D].西安:西安理工大學,2003.
Design of Drive and Snubber Circuit for a Transverse Flux Motor
HOUShu-han,LIHong-mei,ZHOUYa-nan,YAOHong-yang
(Hefei University of Technology,Hefei 230009,China)
Based on the opto-coupler HCPL4504 and the integrated chip UCC27321, a power drive circuit was designed for a transverse flux motor using MOSFET as power devices. The design has simple and reliable peripheral circuit. The RCD snubber circuits was also designed to suppress voltage spikes across the MOSFET. Then, the overall structure, drive circuit design and key parameters' determination was described in detail. The experimental testing of suggested drive circuit and snubber circuits was accomplished to verify their practicality and effectiveness for a transverse flux motor with rated power of 900 W.
transverse flux motor; MOSFET; drive circuit; UCC27321; RCD snubber circuit
2015-08-02
國家自然科學基金項目(51377041);國家留學基金項目(20143026)
TM33
A
1004-7018(2016)05-0068-03
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
