永磁同步電動機的哈密頓控制與DSP實現
2016-05-25 00:37:35解洪超于海生
微特電機 2016年5期
關鍵詞:信號
解洪超,于海生
(青島大學,青島 266071)
永磁同步電動機的哈密頓控制與DSP實現
解洪超,于海生
(青島大學,青島 266071)
為了實現對永磁同步電動機(PMSM)速度的精確控制,提出了一種利用端口受控哈密頓(PCH)方法對速度伺服系統進行控制的方法。首先,根據PMSM的PCH數學模型,求取速度控制器,并針對負載轉矩未知的情況設計了轉矩觀測器;然后,搭建了一套基于TMS320F2812 DSP的速度控制系統實驗平臺;最后,通過實驗對設計的控制器進行了驗證。實驗結果表明了該控制器能夠實現電機的速度控制,并且具有良好動態性能及穩態性能,滿足了PMSM高性能控制要求。
永磁同步電動機;TMS320F2812;哈密頓系統
0 引 言
永磁同步電動機具有結構簡單、功率因數高、負載能力強、性能可靠等優點,在各種高精度伺服控制系統中應用廣泛[1]。同時,半導體技術的快速發展,使得數字化控制器成為電機控制的主流方向。適合于電機控制的數字信號處理器由于計算能力強、片外資源豐富和性能穩定等諸多優點在交流驅動系統中得到廣泛應用,TMS320F2812作為一款主流的DSP芯片在伺服控制系統中倍受青睞[2-3]。因具有控制簡單、集成化水平高、控制精確、抗干擾能力強的特點, 以DSP為核心的伺服系統已成為交流伺服系統發展的趨勢[4]。
控制策略的發展使人們不再滿足于單一的PI控制,開始研究高性能控制策略在DSP中實現的可能性。文獻[5]針對PMSM的矢量控制和直接轉矩控制進行了實驗驗證, 但是直接轉矩控制會出現轉矩和磁鏈脈動的問題;文獻[6]設計了一套利用模糊控制策略對伺服系統進行控制的系統,但是存在控制精度低的問題;文獻[7]將滑模變結構控制策略引入到PMSM控制系統中,但會降低系統的穩定性。與模糊控制策略和滑模變結構控制策略相比,端口受控哈密頓控制方法具有結構簡單、控制器求取比較容易、響應快速、穩態誤差小等的優點[8]。同時,相對于傳統PI控制,端口受控哈密頓系統控制精度高,可控制性強,但系統對于電機參數依賴性強,容易受到環境的影響而造成系統的不穩定。將端口受控哈密頓控制方法通過DSP應用到永磁同步電動機速度控制系統中,不但可以提高系統的控制精度和響應速度,同時也能夠有效抑制系統擾動。
1 永磁同步電動機的PCH原理及控制器設計
PMSM在dq同步旋轉坐標系下的數學模型[9]:
(1)
式中:ud,uq分別為d,q軸定子電壓;id,iq分別為d,q軸定子電流;τL為負載轉矩;Ld,Lq分別為d,q軸定子電感;J為轉動慣量;Rs為定子電阻;Φ為永磁體產生的磁鏈;p為極對數;ω為轉子機械角速度;θ為機械角度;τ為電磁轉矩。
端口受控耗散哈密頓系統模型[10]:
(2)
式中:R(x)為半正定對稱矩陣,R(x)=RT(x)≥0;J(x)為反對稱矩陣,J(x)=-JT(x);H(x)為哈密頓函數。
定義系統的狀態變量和輸入變量:
(3)
取PMSM系統的哈密頓函數:
(4)
可將PMSM模型(1)寫成式(2)的端口受控耗散哈密頓形式,且有:
(5)
(6)
當負載轉矩恒定已知時,根據式(1)中永磁同步電動機轉矩方程可知:對于表面式PMSM(Ld=Lq),利用最大轉矩/電流原理可確定穩態時(在平衡點處)負載轉矩τL與id,iq的關系:
(7)
根據式(3)、式(7)及端口受控哈密頓控制原理可求得速度控制器[9]:
(8)
當負載轉矩恒定未知時,構造負載轉矩觀測器[11]:
(9)
式中:ω,id和iq均是可測的,k1,k2為設計參數,選取適當的k1,k2可使觀測器漸近穩定,取:
(10)
式中:sp為觀測器的極點。
(11)
由于觀測器中存在微分,將觀測器(9)離散化后得到負載轉矩觀測器的離散化數學模型:
(12)
式中:T為采樣周期。由已知的ω,id和iq便可在DSP中計算出負載轉矩的估計值。由觀測器模型(12)和控制器模型(11)即可實現對PMSM負載轉矩恒定未知時速度的控制。
2 基于PCH方法的永磁同步電動機控制系統原理圖
基于狀態PCH方法的PMSM速度控制系統如圖1所示,系統采用id=0的矢量控制,控制器采用端口受控哈密頓控制方法,其中,ω0給定角速度,ω表示電機的實際角速度。
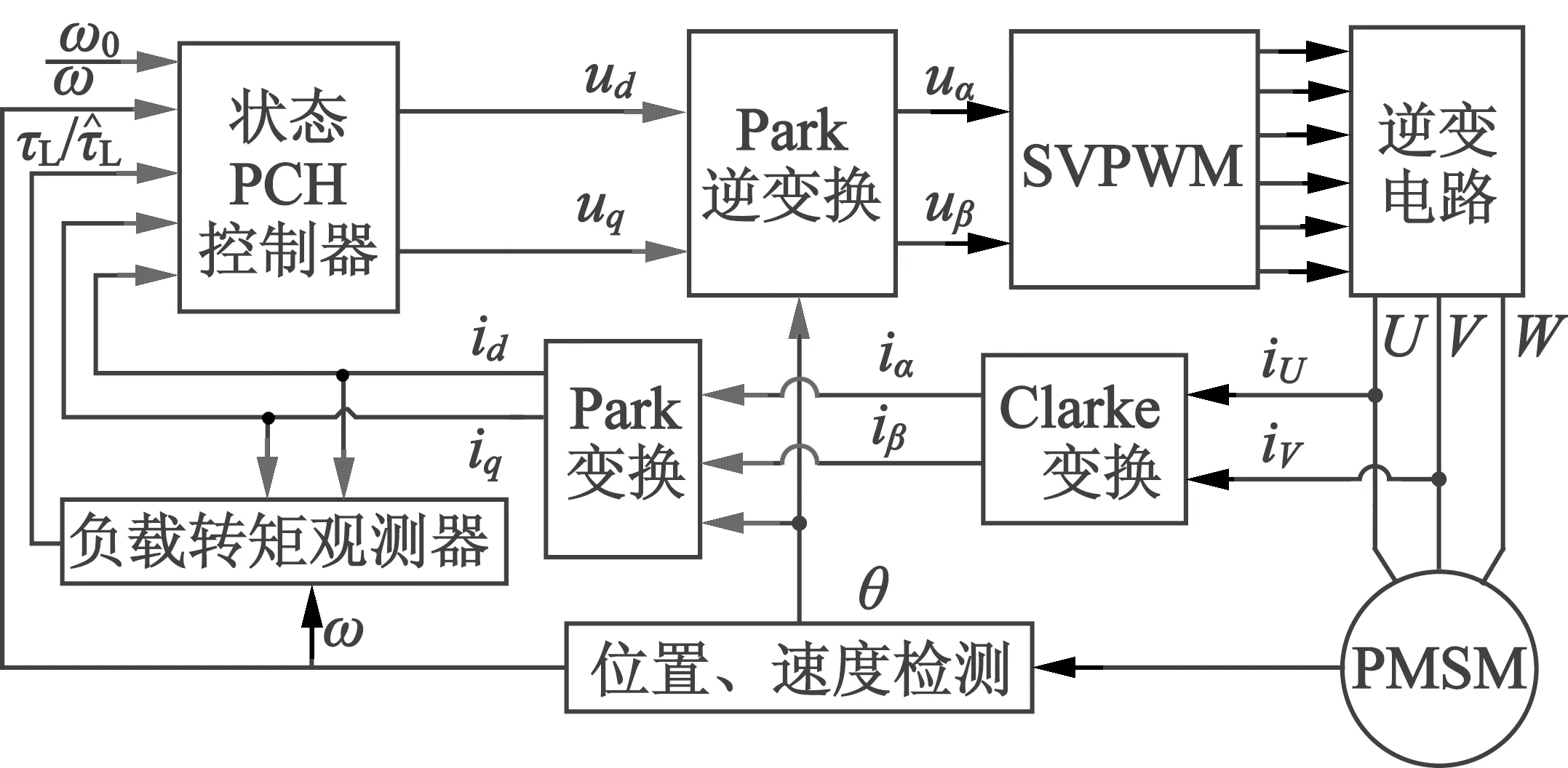
圖1 永磁同步電動機速度控制系統框圖

3 控制系統實驗平臺硬件設計
為了驗證PCH控制算法的可行性,搭建了一套試驗平臺以實現PMSM的速度控制。實驗平臺的硬件電路如圖2所示。試驗平臺主要分為逆變電路、永磁同步電動機、檢測電路和控制電路4部分。
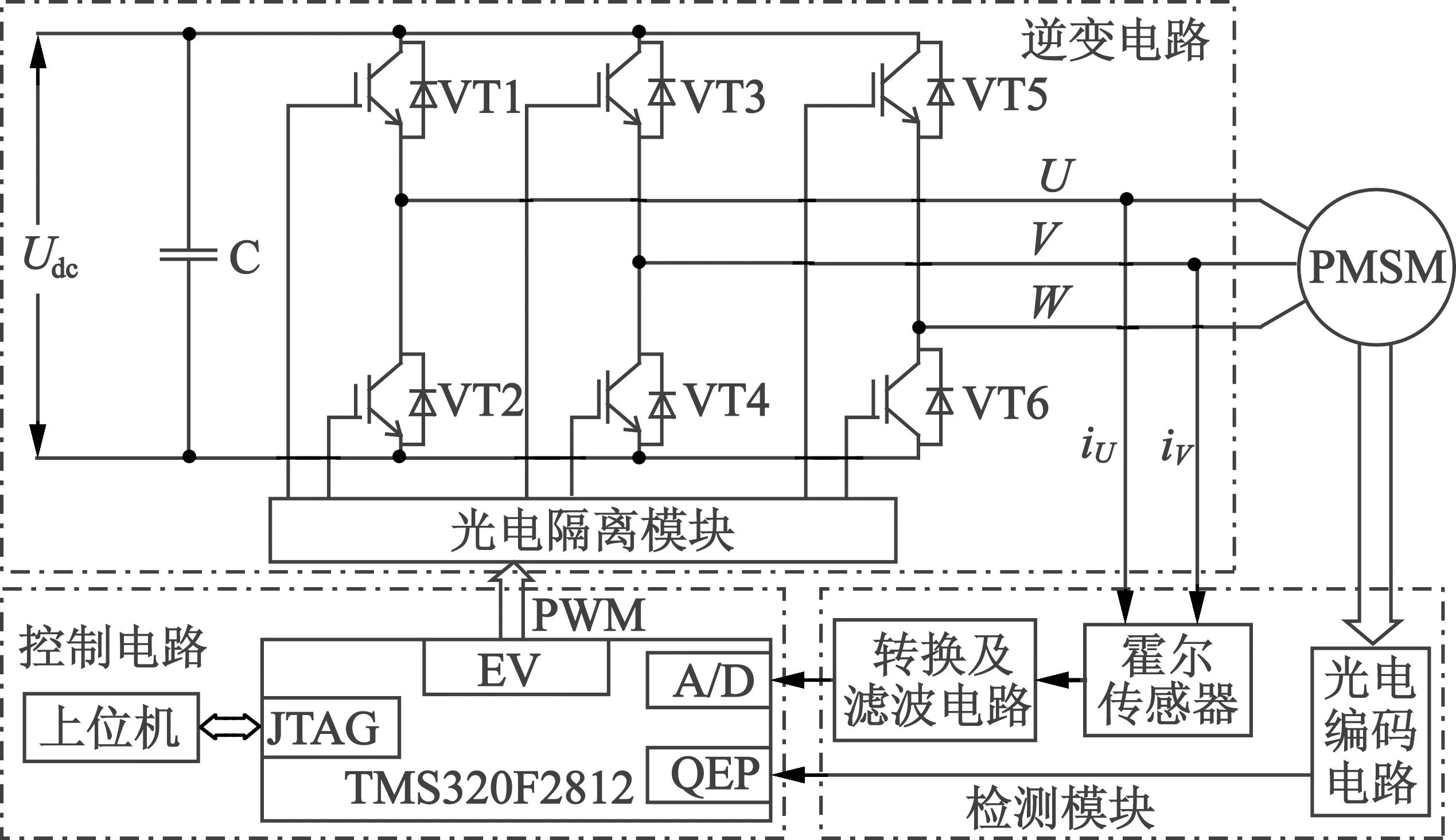
圖2 實驗平臺的硬件電路設計
逆變電路以智能功率模塊(以下簡稱IPM)作為主控對象,將直流電轉化成期望的三相電以驅動電機[12]。永磁同步電動機采用表面式PMSM。檢測電路包含電流檢測和速度檢測電路,并構成電流和速度反饋雙通道;電流檢測通過霍爾電流傳感器將電流值轉化成相應的電壓值,并通過轉換和濾波電路將檢測值輸入到控制電路中A/D模塊;速度測電路通過光電編碼器將速度量轉換成脈沖信號后輸入到控制電路中的QEP單元。控制電路以TMS320F2812為控制核心,根據反饋的電流和速度值并根據控制策略,經過內部運算后,在EV模塊中輸出相應的6路PWM波經光電隔離后輸入到逆變電路中,以實現對電機的控制。
3.1 逆變電路設計
逆變電路將控制電路輸出的PWM波,經光電隔離后輸入到IPM中,實現了將直流電逆變為三相交流電,以對驅動電動機。其中,逆變電路由IPM和光電隔離電路構成。
IPM具有結構簡單、驅動功率小等特點,本設計中采用FSAM30SH60A型IPM,該IPM將6個IGBT封裝在一起, 組成三相全橋逆變電路,并且模塊內部集成了檢測及保護電路,若模塊控制電源發生過流、過壓、過熱等故障時,IPM將故障信號送到DSP中,實現對系統的實時保護[13],確保系統具有很高的安全性和可靠性。
光電隔離模塊主要實現控制信號與驅動電路之間電氣隔離,對系統起到至關重要的保護作用。系統設計選用6N137高速光耦作為光電隔離器,并將它的使能引腳VE和IPM的保護管腳相連接,在系統產生故障時,能夠迅速切斷PWM信號的輸入,對系統實時保護。由于6N137的信號輸入端電壓要求為5 V,而TMS320F2812產生的PWM波為3.3 V,在將PWM波輸入到光耦前,需要先接入反相輸出觸發器74LS563[2]。圖3給出了光電隔離模塊的結構。
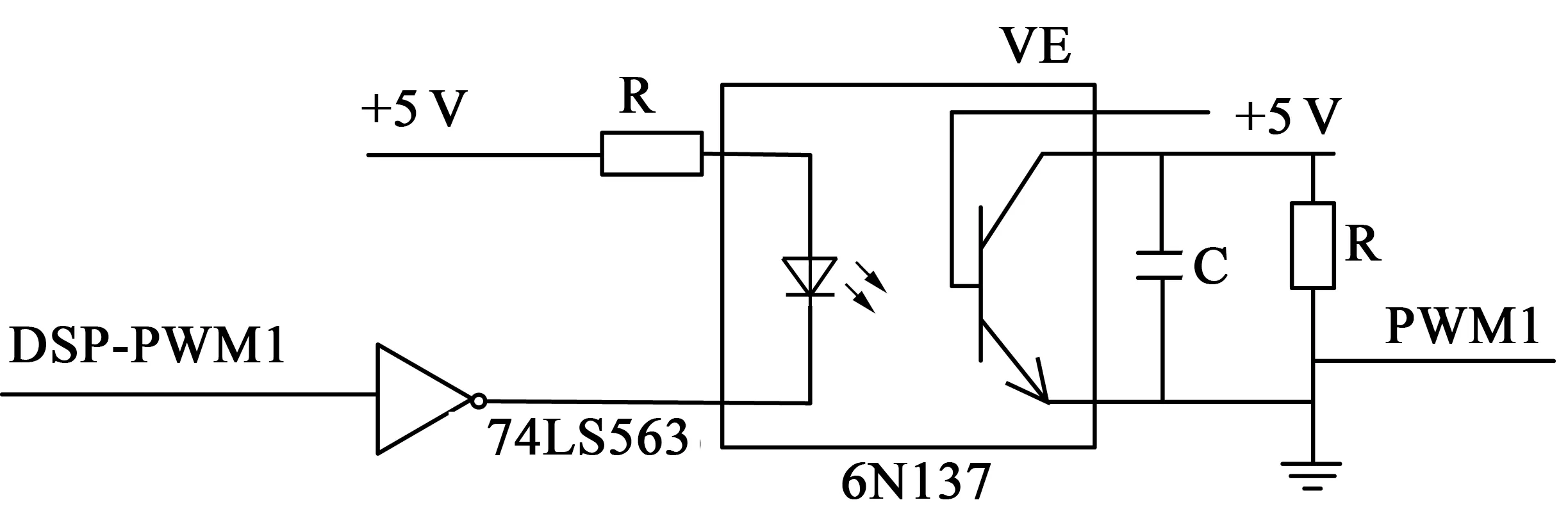
圖3 電隔離模塊的結構圖
3.2 電流檢測電路
電流檢測的原理主要是利用電流傳感器將電流信號轉化為電壓信號,再經過放大偏移及濾波處理后,得到滿足TMS320F2812 A/D輸入范圍(0~3 V)的電壓信號,以獲得電機的電流信息,構成電流反饋通道[13]。
實驗采用TBC10SY霍爾電流傳感器,它將電流信號轉化為-4~+4 V的電壓信號,經分壓和偏移處理后,最終得到0~3 V的電壓信號,并通過低通濾波和電壓跟隨器進行濾波處理。圖4示出定子A相電流檢測電路圖。
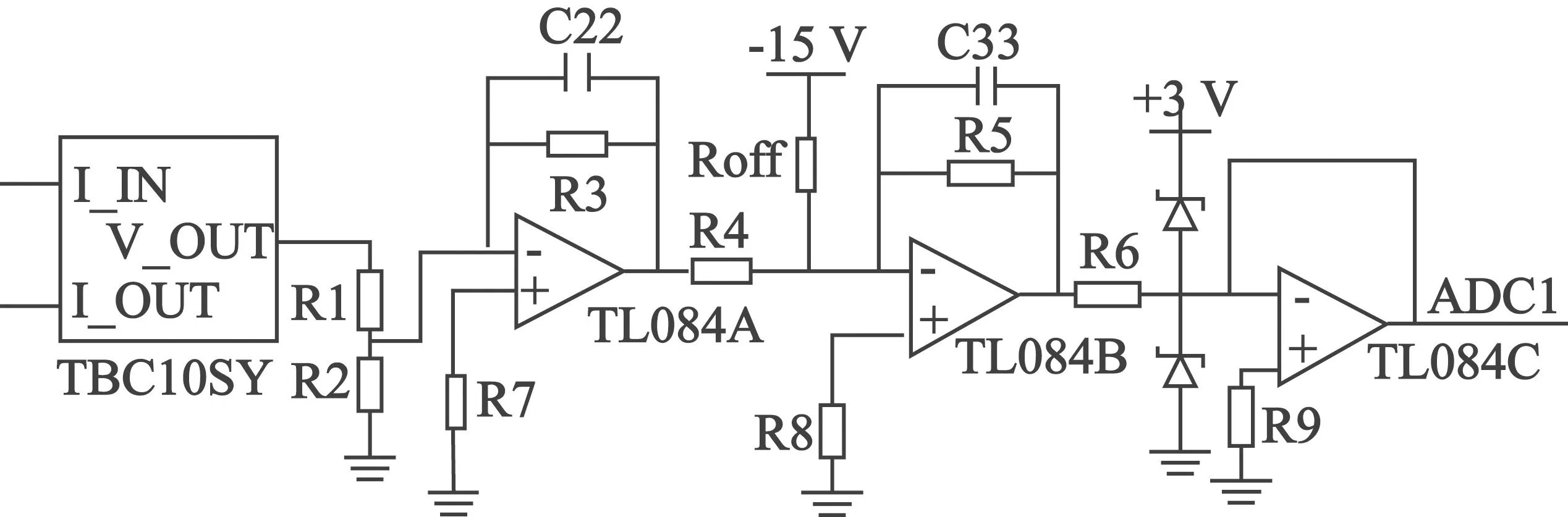
圖4 A相電流檢測電路
3.3 速度信號檢測電路
速度檢測電路通過光電編碼器將電機的速度信息轉化為正交電脈沖信號,并經過轉換后輸入到DSP的事件管理器(EV)中,然后,正交編碼電路和捕獲單元根據光電編碼器的脈沖信息來確定電機的轉速以及轉動方向[13],從而構成速度反饋通道。
實驗采用可產生A+,A-,B+,B-,Z+,Z- 6路差分信號的2 500線增量式光電編碼器,并通過差分信號轉換芯片AM26LS32AM將差分信號轉換成0~+5V的A,B,Z三路脈沖信號,然后,利用芯片SN74LVC4245DB(雙向電平轉換器)將脈沖信號轉換成滿足DSP電壓輸入范圍的信號后再輸送到EV模塊中[2]。圖5給出了正交編碼脈沖轉換電路。
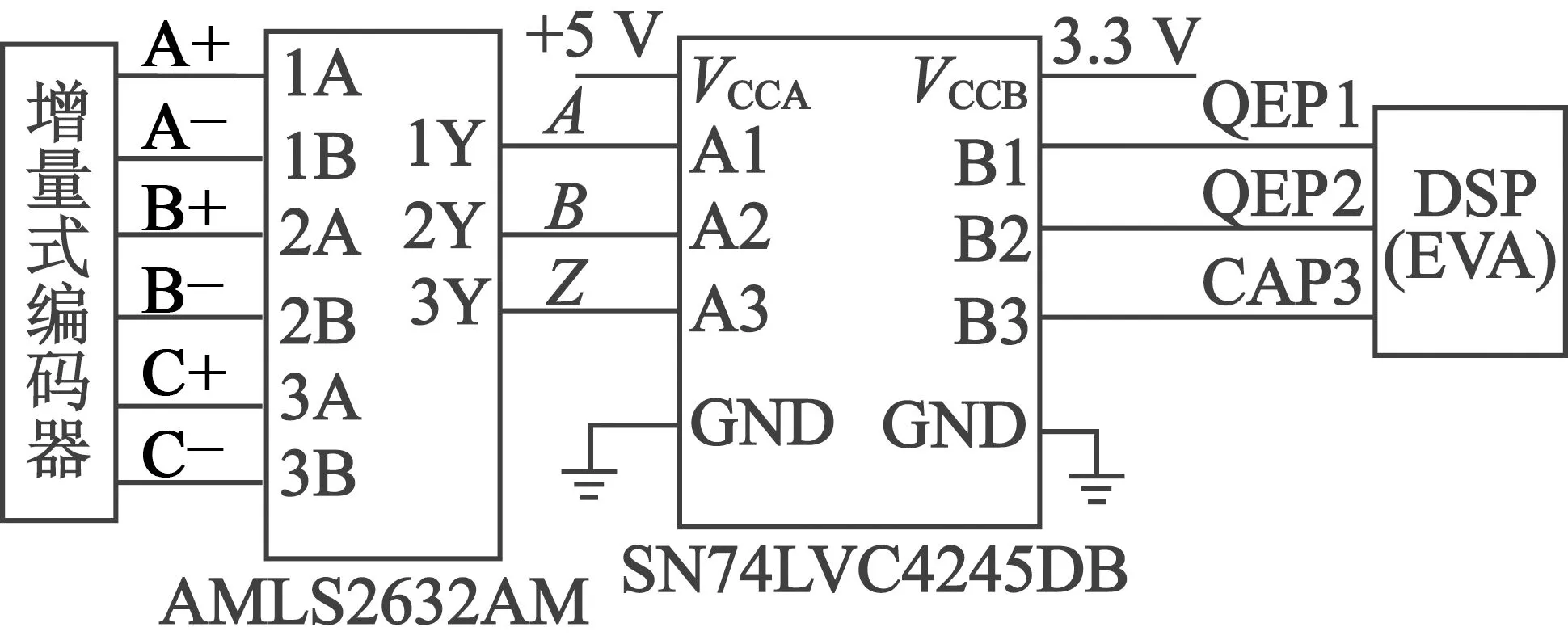
圖5 正交編碼脈沖轉換電路
4 實驗結果
為了驗證基于端口受控哈密頓控制算法的實際控制效果,對PMSM控制系統進行了實驗研究。被控對象為一臺內部集成光電編碼器的PMSM,光電編碼器為2 500線增量式編碼器。PMSM的型號為SM060R20B30MN,其參數為:額定功率PN=200 W,額定電流IN=7.2 A,額定轉矩TN=0.637 N·m,瞬時最大轉矩Ts=1.9 N·m,永磁體磁通Φ=0.175 Wb,額定轉速ω=0.637 N·m,極對數p=4,轉動慣量J=0.189×10-4kg·m2,定子電阻R=0.33 Ω,定子電感L=0.9 mH。
圖6和圖7為負載轉矩恒定已知(τL=0.2 N·m)的情況下U,V相的定子電流響應曲線和系統轉速響應曲線,控制器的給定參數為ω0=200rad/s,r=4,k=2。
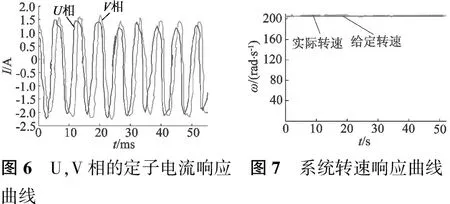
圖6 U,V相的定子電流響應曲線 圖7 系統轉速響應曲線
從圖6和圖7中我們可以看出,在轉矩已知的情況下,控制系統能夠快速到達給定轉速,且穩態誤差很小,控制效果良好。
在有負載轉矩觀測器的情況下,電機的起動負載為τL=0.2N·m,30s后負載轉矩變為τL=0.4N·m,負載轉矩的跟蹤曲線及轉速響應曲線如圖8和圖9所示,控制器的給定參數為ω0=220rad/s,r=4,k=2,負載轉矩觀測器參數為sp=-100,從圖8中可以看出轉矩觀測器能夠跟蹤負載轉矩,但同時由于外部干擾的問題,觀測到的負載轉矩存在擾動,對實驗系統有一定的影響,有待于進一步優化。由圖9可以看出,加上負載觀測器后,在負載發生變換的情況下,電機能夠很快的恢復到給定速度使系統達到穩定。
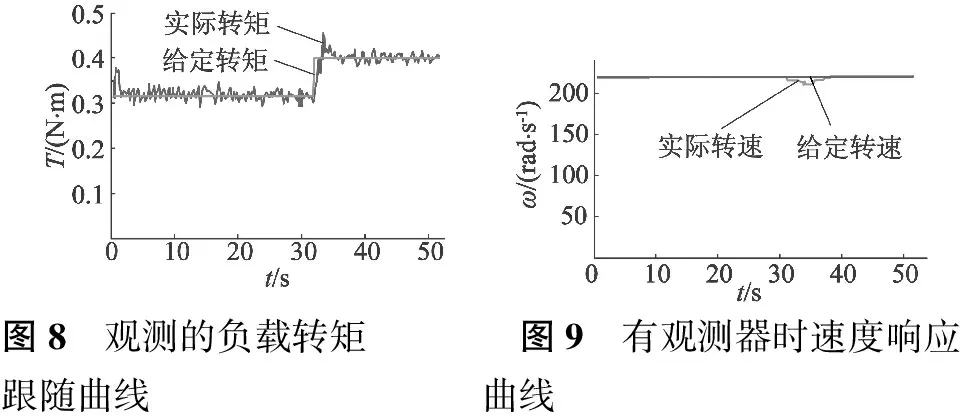
圖8 觀測的負載轉矩跟隨曲線 圖9 有觀測器時速度響應曲線
5 結 語
本文采用哈密頓控制方法實現了對永磁同步電動機的速度控制,并針對轉矩未知的情況,設計了負載轉矩觀測器,有效地解決了負載變化對電機控制的干擾問題。在此基礎上,選用TMS320F2812為核心,并配以A/D采樣電路、旋轉編碼電路和保護電路,設計了一套基于DSP的永磁同步電動機哈密頓控制系統。針對轉矩已知和轉矩未知兩種情況,分別進行了電機速度控制實驗驗證。實驗結果表明:基于PCH的永磁同步電動機速度控制方法是可行的,并且具有良好的控制效果。
[1] 王宏,于泳,徐殿國.永磁同步電動機位置伺服系統[J].中國電機工程學報,2004,24(7):151-155.
[2] 解洪超,于海生.永磁同步電動機調速系統的實現與實驗研究[J].青島大學學報(工程技術版), 2015,30(2):1-6.
[3] 宋雪雷,王永興.基于DSP的PMSM控制器設計及相關問題分析[J].電力電子技術,2010,44(7):33-34.
[4] 林偉杰,鄭灼,李興根,等.模糊自適應PI控制永磁同步電動機交流伺服系統[J].中小型電機,2005,32(3):10-13.
[5] 徐艷平,鐘彥儒,楊惠.永磁同步電動機矢量控制和直接轉矩控制的研究[J].電力電子技術,2008,42(1):60-62.
[6] 朱孝勇,李正明.基于DSP的PMSM模糊位置伺服系統的研究[J].江蘇大學學報(自然科學版),2002,23(5):82-86.
[7]LEUVQ,CJOIHH,JUNGJW.FuzzyslidingmodespeedcontrollerforPMsynchronousmotorswithaloadtorqueobserver[J].IEEETransactionsonPowerElectronics,2012,27(3):1530-1539.
[8]LIKe,LIUXudong,SUNJing.RobustcurrentcontrolofPMSMbasedonPCHanddisturbanceobserver[C]//2014 33rdChineseControlConference.IEEE,2014:7938-7942.
[9] 于海生,趙克友,郭雷,等.基于端口受控哈密頓方法的PMSM最大轉矩/電流控制[J].中國電機工程學報,2006,26(8):82-87.
[10] 于海生,魏慶偉,趙克友.雙饋感應電動機的哈密頓系統建模與控制[J].山東大學學報(工學版),2006,36(2):46-51.
[11]PETROVIC,ORTEGAR,STANKOVICAM.InterconnectionanddampingassignmentapproachtocontrolofPMsynchronousmotors[J].IEEETransactionsonControlSystemsTechnology,2001,9(6):811-820.
[12] 孔維娟,葉漢民,覃嘉恒.滑模變結構在數控機床主軸上的DSP實現[J].微計算機信息,2009,25(13):69-71.
[13] 崔皆凡,王賀敏,王成元.基于DSP滑模變結構的PMSM控制系統設計[J].電力電子技術,2008,42(1):63-65.
Hamiltonian Control of Permanent Magnet Synchronous Motor and DSP Implementation
XIEHong-chao,YUHai-sheng
(Qingdao University,Qingdao 266071,China)
To achieve precise speed control of permanent magnet synchrotrons motor (PMSM), the port-controlled Hamiltonian (PCH) method was presented to control the speed servo system. Firstly, the speed controller was got based on PCH mathematical model of PMSM, and a torque observer was designed for the unknown load torque. Then, an experimental platform of speed control system based on TMS320F2812 DSP was constructed. Finally,the experiments were carried out to verify the validity of the designed controller. Experimental results show that the designed controller can achieve the speed control of PMSM, and the system has good dynamic performance and steady-state performance, which can satisfy the high performance requirements of PMSM control system.
permanent magnet synchronous motor (PMSM); TMS320F2812; Hamiltonian system
2015-06-26
國家自然科學基金項目(51077007)
TM341;TM351
A
1004-7018(2016)05-0060-04
解洪超(1990-),男,碩士研究生,研究方向為電力電子與電機系統的非線性控制。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
