永磁同步電動機輸入多采樣率準滑模控制
2016-05-25 00:37:35施幫利
微特電機 2016年5期
關鍵詞:系統
周 鵬,徐 鵬,施幫利
(重慶理工大學,重慶 400054)
永磁同步電動機輸入多采樣率準滑模控制
周 鵬,徐 鵬,施幫利
(重慶理工大學,重慶 400054)
永磁同步電動機矢量控制系統常使用雙閉環(速度和電流)級聯結構,兩個控制回路的動態響應速度存在顯著不匹配,電機的機械和電氣子系統具有典型的多采樣率特性。基于多采樣率控制理論,針對電機轉速控制環提出了輸入多采樣率準滑模算法,在輸出量損失數據狀態下,該算法在輸出估計基礎上構建系統擴展輸入向量。由于擴展輸入向量,該算法降低了系統穩態抖振,進而提高整個系統的性能,仿真結果證明了該算法的有效性。
永磁同步電動機;多采樣率控制;擴展輸入向量;準滑模控制;損失數據
0 引 言
永磁同步電動機調速系統多數采用PI調節器來構建,PI調節算法具有簡單、易實現、可靠性高等優點,在一定范圍內能滿足控制要求。但對于永磁同步電動機這樣的具有參數時變及非線性的對象,其系統控制性能易受到外部干擾以及對象參數攝動影響,此時常規PI調節器就顯得力不從心,同時永磁同步電動機矢量控制系統采用的雙閉環級聯結構,而速度環和電流環的動態響應速度顯著不匹配,系統具有典型多率特性,針對該系統構建多采樣率數字控制器,有效利用電流環快速響應特性,提高系統的動態響應速度,同時有效避免級聯系統出現超調現象。目前一些現代控制理論研究成果被應用于交流伺服系統中[1-2],其中滑模控制方法具有對擾動和參數波動不敏感以及動態響應速度快等優點,逐步成為永磁同步電動機控制應用中的研究熱點[3-5]。
結合多采樣率控制理論,本文提出永磁同步電動機輸入多采樣率準滑模控制算法,同時在準滑模趨近律設計引入終端吸引子及系統狀態量,仿真結果證明擴展控制輸入量能有效削弱系統穩態抖振。
1 PMSM輸入多采樣率滑模變結構控制
常規滑模控制往往只考察系統能否趨近滑模面并保持系統穩定,并不能反映趨近滑模面運動過程,而趨近律設計在其相應控制器中需考慮趨近滑模面運動的動態過程,進而保證趨近運動的動態品質。在常規指數趨近律設計中,無論針對連續系統還是離散系統,趨近速度直接與滑模切換函數相關,系統狀態距離平衡點較遠時能保證較快的趨近速度,而當系統狀態在平衡點附近時的收斂速度沒有考慮在趨近律設計中,因此系統狀態極易在平衡點附近因過運動速度過快而振蕩。
對于面貼式永磁同步電動機,在d-q軸坐標系下的數學模型[6-7]:
(1)

結合式(1),忽略運動阻尼影響,同時將負載轉矩視為外部干擾,針對面貼式永磁同步電動機滑模控制系統狀態空間描述[2]:

(2)

為使問題簡化,選擇線性滑模面s=Gx=[c1],x=cx1+x2,文獻[2]在針對永磁同步電動機連續時間系統提出一種帶終端吸引子趨近律:
(3)
結合帶終端吸引子的新型趨近律式(3),設計永磁同步電動機的轉速滑模控制律:
(4)
由式(4)可知,系統控制量中沒有符號函數存在,且經過積分器濾波后控制量抖振減弱,進而對系統狀態抖振有效抑制。另一方面,控制量含有積分環節,能有效消除穩態誤差,提高系統穩態精度。
文獻[2]通過實驗驗證了該趨近律在永磁同步電動機連續時間系統滑模控制中是有效的。然而,在實際電機控制系統中,往往需要對整個系統進行離散化處理,而對其離散時間系統設計控制器更具有現實意義。如前所述,對于永磁同步電動機這樣具有多采樣率特性的系統,在設計數字控制器時應考慮采取輸入多采樣率模式,充分發揮內環(電流)控制系統快速動態響應性能,以提高整個控制系統動態性能。
結合永磁同步電動機連續時間滑模控制系統狀態空間描述式(2),設定系統采樣周期為T,且T足夠小,則系統離散化后的狀態空間描述:
(5)

設定s(k)=Gx(k),同樣對連續系統趨近律式(3)離散化得:
(6)
將式(5)代入式(6)中得:
(7)
移項得到控制律:
(8)
由式(5)中控制量u(k)表達式得到電流iq:
(9)
(10)

引理1[9]假定式(2)的系統∑(A,B)為完全能控的,并且基于采樣周期T滿足:

(11)
式中:λi和λj是A的相異特征值,則式(10)所描述的引入輸入擴展向量后得到的線性時不變系統∑(Φ,Γ)為完全能控。
對于式(2),其能控性判別矩陣:
判別陣Qc的秩為2,則系統∑(A,B)式(2)完全能控,結合引理1中式(11)在一般情況下都能滿足,則擴展輸入后的系統∑(Φ,Γ)式(10)為完全能控。
對于輸入多采樣率系統∑(Φ,Γ)在輸出采樣周期T0內,擴展輸入量ui(k)同樣有N-1個分量,因缺乏系統狀態信息而無法得到更新,結合電機多采樣率狀態空間描述式(10),得不可測點狀態估計:
(12)

結合控制律式(8)及狀態估計式(12),得到不可測點的控制律:
(13)
對狀態可測點的控制u(kT0)量的更新,同樣將輸入多采樣率系統狀態空間描述式(10)轉換為成單采樣率系統,其中擴展輸入量ui(kT0)內的各個分量均為u(kT0),轉換得到以T0為采樣周期的單采樣率狀態空間描述:
(14)
結合離散化的控制律式(8)及狀態空間描述式(14),得輸出采樣點控制量u(k):
(15)
2 仿真研究


表1 永磁同步電動機參數
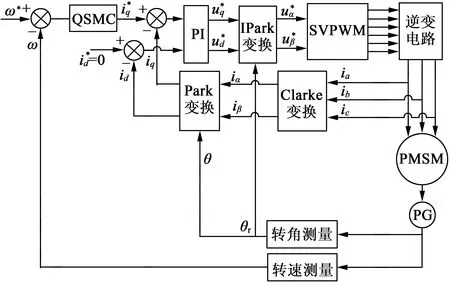
圖1 永磁同步電動機離散時間準滑模控制框圖

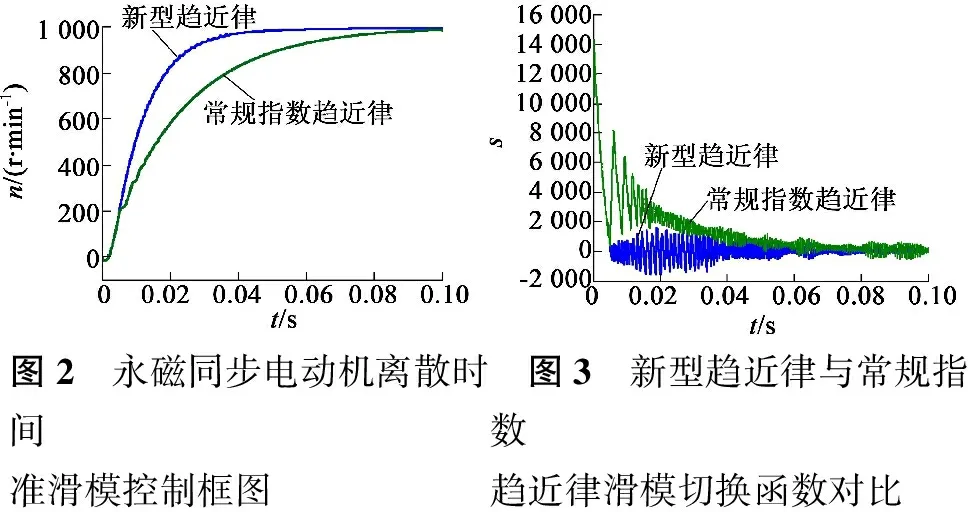
圖2 永磁同步電動機離散時間 準滑模控制框圖 圖3 新型趨近律與常規指數趨近律滑模切換函數對比
在單采樣率控制模式下,采樣周期分別為0.01 ms,0.02 ms和0.03 ms,轉速調節采用新型趨近律準滑模控制器,其轉速響應、滑模切換函數、q軸電流分別如圖4~圖6所示。
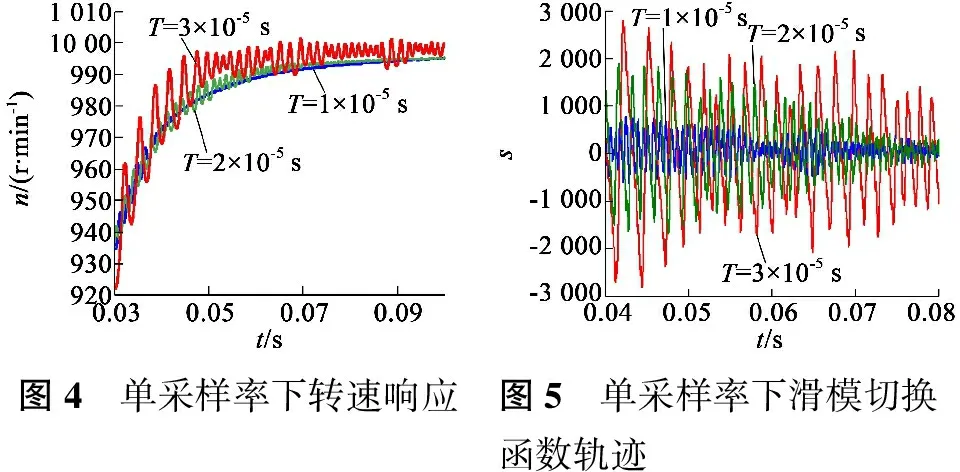
圖4 單采樣率下轉速響應 圖5 單采樣率下滑模切換函數軌跡
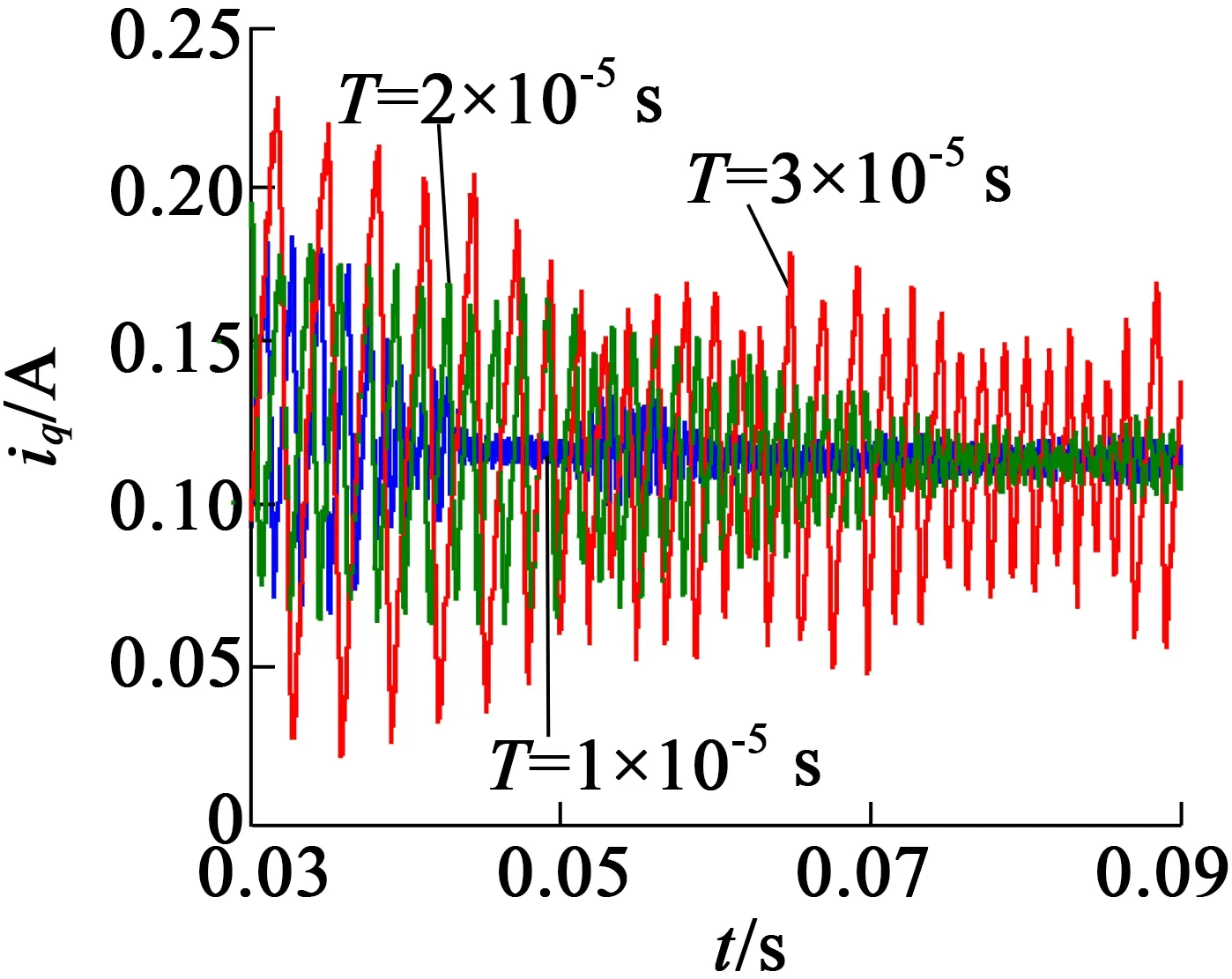
圖6 單采樣率下q軸電流響應
從以上單采樣率實驗結果可以看出,隨著采樣周期的增大,準滑模控制下的系統輸出以及滑模切換函數抖振幅度進一步加劇,由q軸電流響應(圖6)可知,狀態抖振加劇的直接原因是控制量的抖振。另一方面,對于離散準滑模控制系統,采樣頻率的提高有利于消弱控制量及系統狀態的抖振。然而在實際系統中,由于外部器件工作特性的局限,采樣頻率受到很大程度的限制。對于這種測量頻率受限系統,考慮輸入多采樣率控制方式,結合帶終端吸引子準滑模控制方式,被控對象控制量輸入周期0.01 ms,系統輸出周期T0=NT,當N=2時,速度響應和滑模切換函數與采樣周期為0.02 ms單采樣率系統對比分別如圖7和圖8所示。當N=3,單采樣率系統采樣周期為0.03 ms時,其對比分別如圖9和圖10所示。
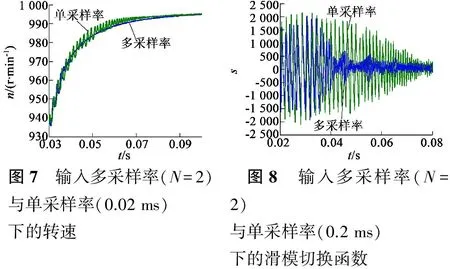
圖7 輸入多采樣率(N=2)與單采樣率(0.02ms)下的轉速 圖8 輸入多采樣率(N=2)與單采樣率(0.2ms)下的滑模切換函數
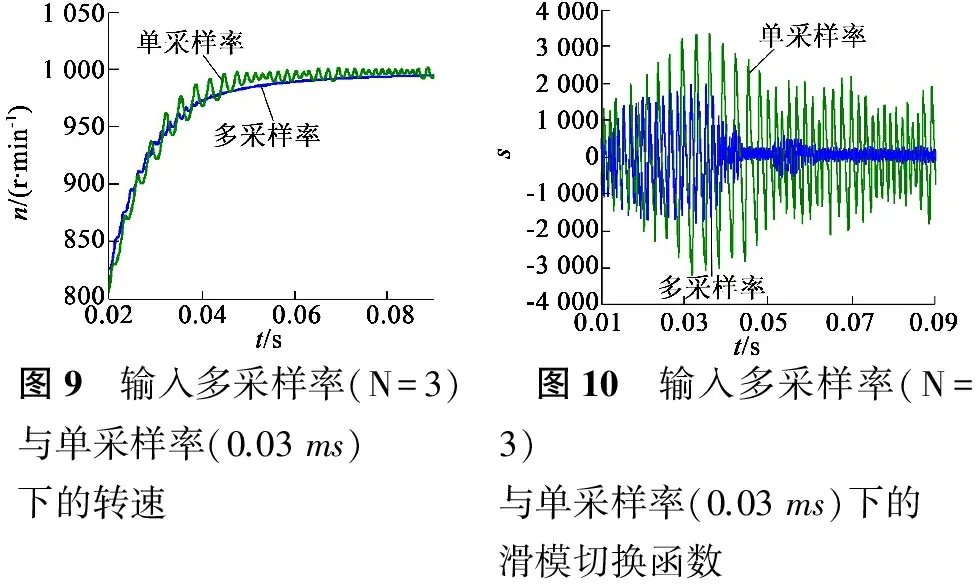
圖9 輸入多采樣率(N=3)與單采樣率(0.03ms)下的轉速 圖10 輸入多采樣率(N=3)與單采樣率(0.03ms)下的滑模切換函數
從上述輸入多采樣率和單采樣率系統的對比實驗可以看出,輸入多采樣率系統由于系統擴展控制量作用,系統狀態以及滑模切換函數的抖振幅度明顯弱于與輸出同頻的單采樣率系統。而當單采樣率系統采樣周期為基周期0.01ms時,輸入多采樣率(N=2,3)的滑模切換函數與其對比如圖11所示,其結果表明輸入多采樣率下與輸入同頻單率系統的控制效果幾乎一致,而輸入多采樣率系統對輸出采樣可在較低頻率進行,需要較少的系統輸出信息。
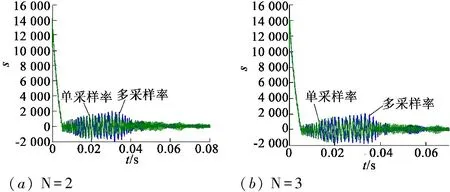
(a)N=2(b)N=3
圖11 輸入多采樣率與單采樣率(T=0.01 ms)下的
滑模切換函數
3 結 語
滑模控制是一種魯棒控制方法,滑動模態對符合匹配條件的參數攝動和外部干擾具有不敏感性,因其良好的魯棒性和快速動態響應等優點。對具有典型多采樣率特性的永磁同步電動機機械和電氣子系統,提出帶終端吸引子輸入多采樣率離散準滑模控制算法,在轉速采樣單位周期時間內,利用擴展的輸入控制量有效降低系統穩態抖振,提高了系統控制品質,仿真結果證明了該算法的有效性。
[1] 王久和.交流電動機的非線性控制[M].北京:電子工業出版社, 2009.
[2] 張曉光,趙克,孫力,等.永磁同步電動機滑模變結構調速系統新型趨近率控制[J].中國電機工程學報,2011,31(24):77-82.
[3] 齊亮.基于滑模變結構方法的永磁同步電動機控制問題研究及應用[D].上海:華東理工大學,2013.
[4] 葛寶明,鄭瓊林,蔣靜坪,等.基于離散時間趨近率控制與內模控制的永磁同步電動機傳動系統[J].中國電機工程學報,2004,24(11):106-111.
[5]QIL,SHIH.AdaptivepositiontrackingcontrolofpermanentmagnetsynchronousmotorbasedonRBFfastterminalslidingmodecontrol[J].Neurocomputing,2013,115(9):23-30.
[6] 劉亢,劉忠途,李樂榮,等.永磁同步電動機在線多參數辨識方法研究[J].微特電機,2012,40(6):4-7.
[7] 王磊,李宏,武明珠,等.基于擴展卡爾曼濾波的永磁同步電動機參數辨識[J].微特電機,2012,40(7):19-22.
[8] 陸華才,徐月同.基于aekf的永磁直線同步電機速度和位置估計算法[J].中國電機工程學報,2009,29(33):90-94.
[9] 肖建.多采樣率數字控制系統[M].北京:科學出版社,2003.
Multirate Input Based Quasi-Sliding Mode Control for Permanent Magnet Synchronous Motor
ZHOUPeng,XUPeng,SHIBang-li
(Chongqing University of Technology,Chongqing 400054,China)
Permanent magnet synchronous motor field oriented control system often uses dual-loop (speed and current) cascade structure, and the dynamics speeds of the two loops mismatch. The motor's mechanical and electrical subsystems have the typical multirate characteristics. Based on the multirate control theory, multirate input quasi-sliding mode algorithm for the speed control loop was proposed. Under the situation of the output data loss, the proposed algorithm built the extended input vector with the output prediction information. Due to the extended input vector, the proposed algorithm reduces the system steadystate chatterring, and then improves the performance of the whole system. Simulation results demonstrate the effectiveness of the proposed algorithm.
permanent magnet synchronous motor; multirate control; extended input vector; quasi-sliding mode control; data loss
2016-01-25
重慶市教委科學技術研究項目(KJ1400942)
TM304;TM351
A
1004-7018(2016)05-0064-04
周鵬(1973-),男,講師,研究方向為電氣系統控制技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
