基于UWB四參考點矢量補償的危化品倉儲堆垛貨物定位方法
2016-05-11 02:14:06戴波呂昕劉學君李志超北京石油化工學院信息工程學院北京067北京化工大學信息科學與技術學院北京0009
化工學報 2016年3期
戴波,呂昕,,劉學君,李志超,(北京石油化工學院信息工程學院,北京067;北京化工大學信息科學與技術學院,北京0009)
?
基于UWB四參考點矢量補償的危化品倉儲堆垛貨物定位方法
戴波1,呂昕1,2,劉學君1,李志超1,2
(1北京石油化工學院信息工程學院,北京102617;2北京化工大學信息科學與技術學院,北京100029)
摘要:監控危化品倉儲堆垛五距(堆距、墻距、頂距、柱距和通道距)是危化品倉儲安全監管的重要課題,研究危化品堆垛貨物的高精度定位技術,是通過三維重構方法對危化品堆垛方式安全進行自動化監控的前提。分析了危化品倉儲環境中影響UWB(ultra wide band)定位精度的主要因素,提出一種基于UWB四參考點矢量補償的危化品倉儲堆垛貨物定位技術。首先將待監測區域劃分為矩形網格,并建立參考系,將各網格頂點設為參考點,獲得參考點處UWB定位值的誤差矢量,作為校正待測點的參考矢量;將危化品倉儲中堆垛貨物與UWB標簽綁定,尋找標簽所處網格,用該網格的四參考點矢量補償方法對標簽的測量坐標值進行校正,將校正后坐標作為堆垛的最終定位位置。經實驗表明,該方法能有效改善危化品倉儲堆垛貨物的定位精度,適合于危化品倉儲堆垛的五距監測。
關鍵詞:堆垛;五距監測;安全;算法;控制;UWB定位;參考點
2015-12-28收到初稿,2016-01-11收到修改稿。
聯系人及第一作者:戴波(1962—),男,教授。
Key words: stacking storage; five-distance monitoring ; safety ; algorithm ; control ; UWB locating; reference
引 言
危險化學品因其固有的毒性、易燃性、腐蝕性等危害,一旦發生事故,將對化工區域甚至周邊地區造成不可估量的損失。因此,為避免安全隱患,國家對危化品倉儲的五距(堆距、墻距、頂距、柱距和通道距)有著嚴格的規定。但目前,對危化品倉儲安全狀態的監管,研究多集中在對運輸過程或箱體罐體自身安全參數上的監控,或是對風險及事故影響的辨識方法分析,缺乏對堆垛方式安全的自動化監控[1]。
要實現自動化監管危化品的堆垛距離是否符合要求,一種直觀的方式是查看實時還原的堆垛3D場景,通過對危化品的堆垛貨箱進行跟蹤定位,用貨物堆放位置的精確定位參數和貨物尺寸數據實現倉儲的堆垛三維重構,就可以對危化品貯存五距進行實時監控。由于堆垛間距會因為貨物定位坐標變動而改變,當堆垛間距小于預設的閾值范圍時,就可觸發逾限報警。該方案能有效實時監測危化品的堆放方式,消除倉儲堆放環節的安全隱患。因此,研究危化品堆垛貨物的高精度定位技術,是通過三維重構方法自動化監控堆垛方式安全的前提。
我國《常用危險化學品貯存通則》對危險品貯存的五距給出了明確規定和數值,一般性地有:隔離貯存、隔開貯存或分離貯存的垛距為0.3~0.5 m,墻距寬度為0.3~0.5 m;更具體地以危險品三硝基苯甲醚為例,堆碼苫墊要求:貨垛下墊高15~30 cm,宜堆小垛,垛高不超過2 m,垛距80~90 cm,墻距、柱距30~50 cm。為能有效監測堆垛間的安全距離,定位系統需要達到分米級,甚至厘米級的精度才能保證距離報警的準確性。在目前的室內定位技術中,超寬帶(ultra wide band,UWB)定位技術定位精度能達到15~30 cm,與Wifi、zigbee、RFID、紅外線等載波技術的定位精度相比是最高的[2]。UWB無線通信是一種不用載波[3-4],而采用時間間隔極短(小于1 ns)的脈沖進行通信的方式,與普通二進制移相鍵控(binary phase shift keying,BPSK)信號波形相比,這種通信方式占用帶寬極寬,頻譜功率密度極小,因此具有精度高、穿透能力強、抗多徑抗干擾能力強及成本低等優勢[5-8],較適合用于危化品倉儲堆垛定位。
但研究發現,超寬帶定位系統在遮擋物較多的非視距室內環境中,特別是環境中存在金屬、液體等對高頻信號衰減影響很大的物體時,性能出現明顯惡化[9]。在針對危化品模擬倉庫環境中的UWB定位性能實驗中發現,出現的具體影響包括:定位坐標小幅度抖動、節點短暫消失甚至大幅跳變、定位坐標嚴重偏離真實坐標等現象[10],可見UWB定位在危化品倉儲環境中的穩定性和精度仍有待提高。
通過對超寬帶技術定位精度的誤差來源分析,結合危化品倉儲環境特點,提出了一種基于UWB的四參考點矢量補償定位方法。經實驗表明,該方法定位可靠,可有效改善危化品倉儲堆垛的UWB定位性能,為實現危化品堆垛的五距自動化監控打下良好基礎。
1 基于UWB的堆垛五距監測方案
1.1 基于UWB的堆垛定位實驗平臺
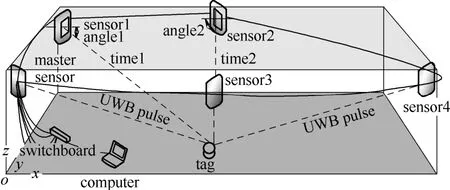
圖1 UWB系統定位原理圖Fig.1 UWB positioning principle of Ubisense7000
為分析研究UWB定位系統在危化品倉儲環境中的定位性能,本文依托英國Ubisense7000系統提供的標簽(tag)和傳感器(Ubisense sensor),搭建了模擬危化品倉儲堆垛安全實驗平臺。Ubisense定位系統由3個部分構成:電池供電的UWB標簽、位置固定的定位傳感器和信息綜合軟件平臺[11]。如圖1所示,在一個定位單元中,Ubisense系統工作時,標簽發射極短的UWB脈沖信號,被傳感器接收,傳感器通過信號到達的時間差(time difference of arrival,TDOA)和信號到達的角度(angle of arrival,AOA)算法經軟件平臺計算出標簽的精確位置[12]。標簽位置能被任意兩個信息計算出來,比如TDOA和一個AOA,或者兩個AOA,因此,標簽最少只需兩個傳感器便可進行定位,實際應用中,更多的傳感器能保證定位精度的可靠性與有效性。同時,Ubisense系統支持雙向的標準射頻通信,可靈活設置標簽數據更新率,傳感器網絡上報的位置數據經處理后,可通過基于.NET的API與上層軟件進行交互。將UWB標簽一對一地附著在危化品堆垛貨物上,就能實現對每一個貨位的定位和跟蹤。將定位信息與貨物本身尺寸信息綜合,就可實時還原倉庫堆垛位置及間距,進而判斷危化品倉儲的五距是否符合要求。
1.2 影響UWB定位性能的因素分析
在危化品倉儲環境中,許多因素會影響超寬帶定位系統精度,因此為了提高定位系統的精度和穩定性,必須要引入錯誤及干擾的根源,再尋找合適的算法來改善定位性能。由于本文實驗平臺采用的Ubisense7000系統通過TDOA/TOA(time of arrival,TOA)技術進行聯合定位,因此下面主要分析基于時間和角度定位相關的誤差因素[13-15]。
多徑傳播是引起各種信號測量值出現誤差的主要原因之一。尤其是基于到達角度的定位中,在室內復雜信道環境下,障礙物的散射引起的多徑效應嚴重影響精確角度估計[16]。即使在傳感器和標簽之間存在視距(LOS)傳播,多徑效應也會引起時間測量誤差[17]。就TOA/TDOA估計而言,由于多徑的存在,使用多徑分量中最早分量DP(direct path)的TOA進行測距誤差是最小的,所以測距精度取決于DP檢測精度。目前已有許多種抑制多徑的方法,比如在研究較充分的TOA估計算法中,基于能量檢測的TOA非相干估計可依據能量采樣峭度和最大最小能量比對DP塊檢測門限進行動態優化,提高DP檢測成功率[18-19],但受采樣頻率限制,定位精度不理想;基于匹配濾波的相干TOA估計算法,采用較高的采樣速率,能夠最大程度挖掘UWB的精確測距能力:比如在視距(LOS)環境中,MUSIC[20]、PM[21]等算法具有很高精度,但在信噪比較低或者多徑效應嚴重的NLOS(not line of sight)環境中,上述算法在實現峰值搜索方面依然十分困難,且算法復雜度很高;文獻[22-24]提出了基于傳播算子算法的TOA和DOA聯合估計,一定程度上提高了高信噪比環境下的TOA定位精度,但需要較高的采樣率導致算法可行性較差。總之,DP的檢測精度和算法復雜度之間的矛盾難以實現妥善調和。
影響TOA/AOA估計定位精度的另一個主要因素是信號非視距傳播(NLOS)。當傳播信道中無直射路徑時,只有信號的反射和衍射成分能夠到達接收端,此時DP到達時間不能代表TOA的真實值,信號到達角度也不能代表AOA的真實值,存在非視距誤差。在沒有任何非視距誤差信息的條件下,正確估計信號源位置是不可能的。目前消除非視距傳播引起的TOA誤差通常有以下幾種方法:一種是通過TOA測量值的標準差對LOS/NLOS傳播環境進行判斷,NLOS傳播的測距標準差比LOS傳播高得多,利用測距誤差統計的先驗信息就可以將一段時間內的NLOS測量值調節到接近LOS的測量值;另一種方法是降低非線性最小二乘算法中NLOS測量值的權重,這種方法也需首先判斷哪些基站得到的是NLOS測量值[25]。事實上,從概率的角度講,無論采用的算法多么精準,都無法完美解決某一時刻信道陷入深衰落的問題。
2 基于UWB四參考點矢量補償定位方法
2.1 方法提出
由UWB的定位原理可知,定位結果的計算由信號傳輸的直達路徑和到達角度決定,在倉庫足夠大的情況下,倉儲地面上一小片區域內的不同點的直射路徑差和到達角度差別不大,因此該區域內監測點的定位結果誤差應該有相同或相似的規律。該點的定位精度誤差和以其為圓心的某圓上的所有監測點的誤差方向和大小應存在類似分布。將該小圓化簡為4個點構成的四邊形,那么,四邊形的4個頂點處的誤差矢量和可以近似反映位于該區域內的監控點的誤差矢量。選擇將倉庫區域網格化劃分,在每個網格頂點設置參考點,即形成本文提出的四參考點矢量補償的定位方法。
本方法首先需要建立參考系,對倉庫中需監控區域進行二維方形網格劃分,每個網格的四頂點設為4個參考點,獲得并比較參考點處UWB標簽的測量坐標和實際坐標,得到誤差矢量,作為校正待測點的參考矢量;將危化品倉儲中堆垛貨物與標簽綁定,尋找標簽所處網格,用該網格的四參考點矢量補償方法對標簽的測量坐標值進行校正,將校正后坐標作為堆垛的最終定位位置。具體步驟如下:
(1)建立參考系。在UWB定位系統的覆蓋范圍里,首先對需要監控的平面區域劃分方形網格,設網格頂點為參考點并標記其測量坐標和實際坐標的誤差。在不同的倉儲環境中,由于信道環境不同,UWB定位系統的定位精度有所不同,所以考慮網格大小的劃分時,要具體情況具體分析:網格邊長不宜過大,否則網格四頂點處的誤差不能代表網格內的監測點的誤差規律;間距也不宜過小,否則會導致監測點所處網格的誤判。劃分網格大小的基本原則為:倉儲環境中UWB的定位精度越高,則網格越密越小;精度越低,網格相應變大,要依據具體倉儲環境的定位精度有所調整。
(2)對待測點進行測量校正。進行堆垛定位時,將UWB定位標簽綁定在堆垛貨物上,不同貨物的標簽記為Pn,n =1,2,3,…,通過UWB定位系統得到Pn的測量坐標值PMn,再根據PMn的值判斷Pn所處的參考系網格,如網格Gr;
校正方法:每個網格Gr的4個頂點都是參考點,假設其誤差矢量為A1、A2、A3、A4,則用4個參考點的誤差矢量和反向補償待測點,補償后的坐標為′′記為PMn,PMn為校正后的坐標。本方法能有效減少UWB在危化品倉儲環境中的誤差。
2.2 方法實現
為驗證該定位補償技術的有效性,在Ubisense7000系統搭建的危化品倉儲實驗平臺上進行實驗。首先,設定危化品倉儲中的參考點。經測試,該倉儲環境的最好定位精度在0.15 m以內,最大定位誤差在0.4 m左右,因此將UWB信號覆蓋的倉儲空間按地面劃分為0.3 m×0.3 m的正方形網格,通過激光測距儀依次測出各個參考點的實際坐標,記錄。
本例中,對被監控區域,得到各測量點的UWB測量數據,根據測量結果判斷其所處的網格及參考點。為方便誤差矢量數據的顯示,不失一般性,本例圈出了3個小區域的參考點和測量點分布圖,將這3個小區域從左向右分別編號為G1、G2、G3。每個小區域內含4個測試點,其測試結果分別落在G1、G2、G3的4個小網格中。
通過UWB定位設備得到G1、G2、G3區域各個參考點處的測量坐標,建立實際坐標指向測量坐標的矢量,如圖2所示。
根據3個區域的參考點測量結果顯示,每個網格4個頂點處的誤差矢量都不相同,將每個網格的4個參考點的矢量相加后平均,得到誤差矢量和Am。而該4點組成的網格內的任意測量點的誤差,可由Am近似替代。
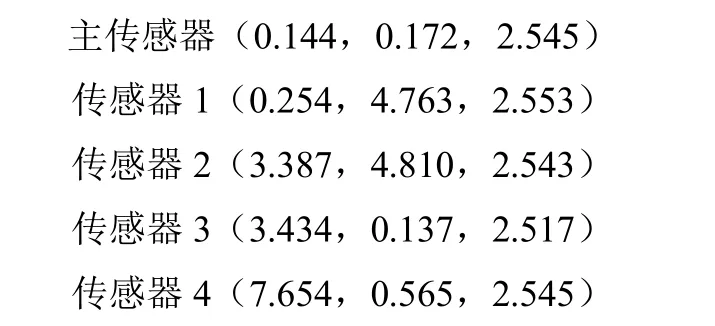
以G1區域中左上角4個參考點組成的小網格為例,其各個參考點的坐標見表1。

各個參考點的實際坐標記為RRm,各個參考點的測量坐標值記為RMm,計算誤差矢量

表1 G1區域某網格參考點坐標Table 1 Coordinates of reference point in region G1

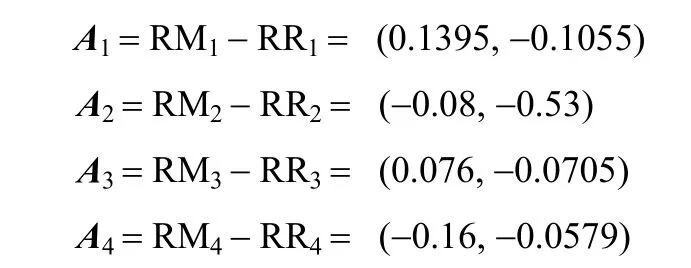
其中誤差矢量計算方法為

以G1區域中左上方4個參考點組成的小網格為例,計算小網格4個參考點的誤差矢量和

得到該網格內測試點的計算坐標為
(1.019, 1.391)+ (0.006, 0.191)= (1.025, 1.582)
2.3 方法精度分析
為驗證四參考點矢量校正方法是否有效,計算各測試點校正前后到實際值的坐標距離,測量點的實際坐標為(1.052,1.682),因此有
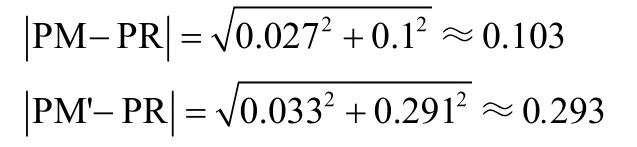
式中,PM′為對待測點測量坐標校正后的坐標值;PM為測量點測量坐標校正前的坐標值;PR為測量點的實際坐標值。
可見該網格內,校正后的定位坐標與校正前的定位坐標相比,距實際值的距離更近,證明了四參考點矢量校正方法有效。采用此方法計算其他測試點的校正后坐標,結果如圖3所示。
由圖中可見,采用四參考點矢量校正方法校正后,各個測試點的定位精度均有所提升,精度提升比例根據參考點處的誤差矢量值不同而有所不同,為方便對比,依然將G1、G2、G3區域圈出。具體數據見表2。表2列舉了監控區域內所有網格待測點處的校正坐標,測量坐標、校正坐標和精度對比數據。
由表2可知,所有可測量點的校正后坐標與真實值平均距離D2為0.204 m,校正前坐標與真實值的距離D1為0.112 m,可以得出結論,待監測區域內所有可測量點在進行四參考點矢量補償技術計算后,精度均有所提升,平均提高程度為0.092 m。驗證了四參考點矢量補償技術方法在危化品倉儲領域有效。
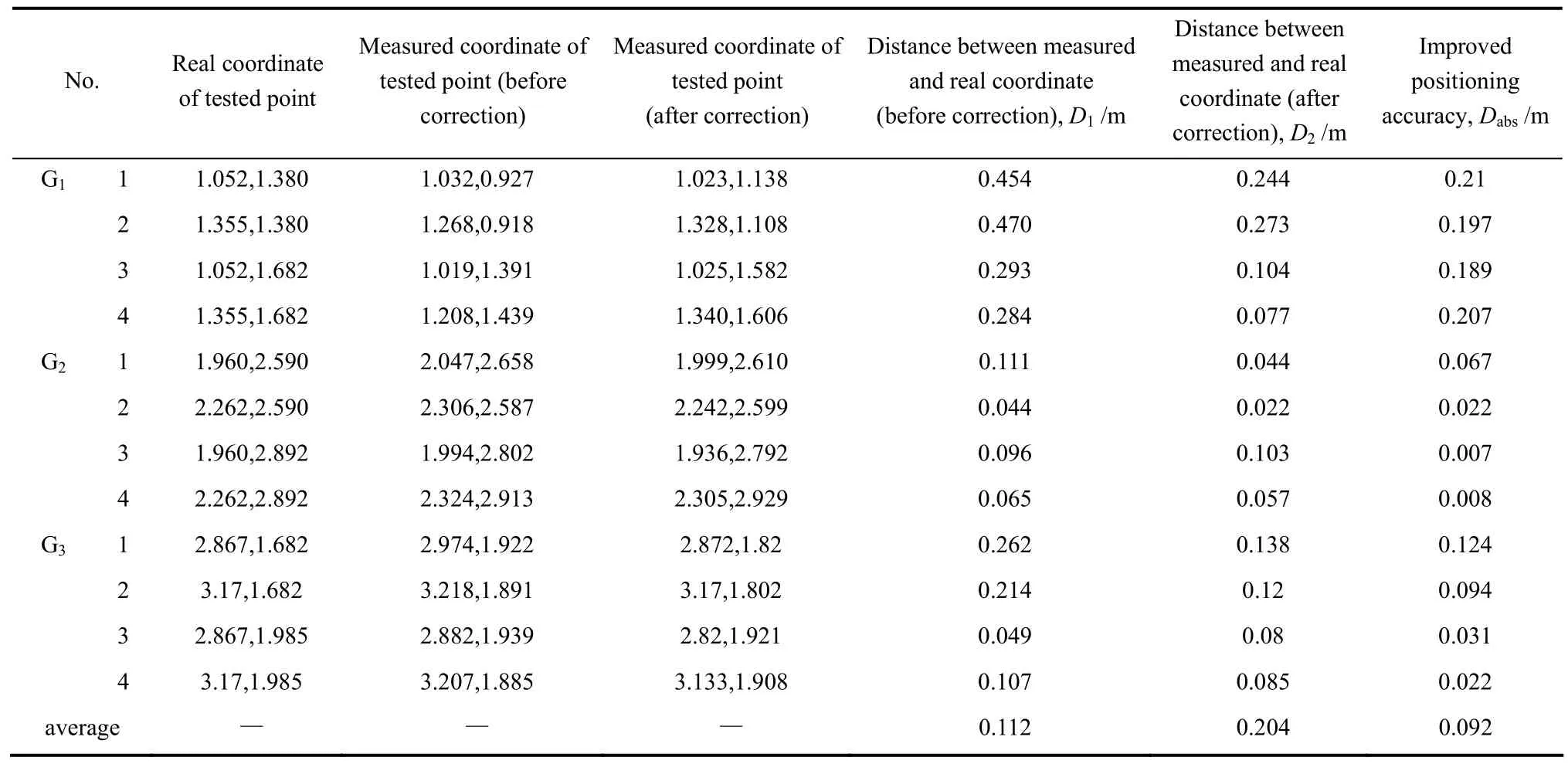
表2 各測量點校正前后精度對比Table 2 Comparison of tested points before and after correction
3 結 論
自動化監控危化品倉儲貨物堆垛的五距,需要研究危化品倉儲環境下的高精度定位技術。UWB窄脈沖由于具有極高的帶寬,有很強的時間分辨力,因此具有極好的精確測距能力。本文分析了危化品倉儲環境中影響UWB定位精度的主要因素,提出一種基于UWB四參考點矢量補償的危化品倉儲堆垛貨物定位技術。經實驗表明,各個測試點的定位精度均有所提升,精度提升比例根據參考點處的誤差矢量值不同而有所不同,該方法能有效改善危化品倉儲堆垛貨物的定位精度,適合用于危化品倉儲堆垛的五距(堆距、墻距、頂距、柱距和通道距)監控。尚未發現國內有類似地提高UWB定位精度的研究方案,下一步工作將對此校正方法做進一步改進,以期獲得更好的定位效果。
References
[1] 柴保身. 我國危險品倉儲業發展現狀與展望 [J]. 物流工程與管理, 2009, 12 (31): 19-23.
CHAI B S. The developing situation and outlook of storage industry of dangerous chemicals in our country [J]. Logistics Engineering and Management, 2009, 12 (31): 19-23.
[2] 張宴龍. 室內定位關鍵技術研究 [D]. 合肥: 中國科學技術大學, 2014. ZHANG Y L. Research on the key techniques of indoor localization [D]. Hefei: University of Science and Technology of China, 2014.
[3] WIN M Z, SCHOTZ R A. Ultra-wide bandwidth time-hopping spread-spectrum impulse radio for wireless multiple-access communications [J]. IEEE Trans Commun., 2000, 48: 679-691.
2.以學術英語為導向,提倡培養批判性思維能力的教學模式。高校在制定大學英語教學目標時,不能單純地以學生記住的單詞數量,掌握的語法準確程度和達到的閱讀速度作為教學目標,應該鼓勵學生在基于學術英語內容的教學過程中學會質疑,善于發現和提出問題,并對問題進行深入的思考和探索,從中獲得具有邏輯性且合理的解決方案。在教學中,學生的英語學習不再是被動地灌輸和單純依靠書本知識,而是通過發現、批判、研究、反思和評論等過程來掌握不同角度的知識獲取途徑。教師可以督促學生處理要求理由充分的判斷或評價的任務,幫助他們提高處理任務所需的語言技能,營造一種珍視批判性思維的環境,激勵學生從事批判性討論。
[4] 范平志, 鄧平, 劉林. 蜂窩網無線定位 [M]. 北京: 電子工業出版社, 2002: 120-128.
FAN P Z, DENG P, LIU L. Cellular Network Wireless Location [M]. Beijing: Electronic Industry Press, 2002: 120-128.
[5] WIN M Z, SCHOLTZ R A. Characterization of ultra-wide band width wireless indoor channels: a communications theoretic view [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1613-1627.
[6] CHOI J D, SCHOLTZ R A. Performance of ultra-wideband communications with suboptimal receivers in multi-path channel [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1754-1766.
[7] WIN M Z, SCHOLTZ R A, BARNES M A. Ultra-wide band width signal propagation for indoor wireless communications [C]// Proceedings of ICC97- International Conference on Communications. Montreal: IEEE, 1997: 56-60.
[8] ROSS G F. Transmission and reception system for generation and receiving base-band duration pulse signals without distortion for short base-band pulse communication system: US3728632 [P]. 1973-04-23.
[9] LEE J Y, YOO S. Large error performance of UWB ranging in multipath and multiuser environments [J]. IEEE Transactions on Microwave Theory and Techniques, 2006, 54 (4): 1887-1895.
[10] 戴波, 呂昕. 基于改進的UWB危化品堆垛倉儲定位技術的研究[C]//第25屆中國過程控制會議論文集, 2014. DAI B, Lü X. Research on improved UWB-based location
technology applied on hazardous chemicals five-distances stacking storage [C]//The 25th Chinese Control Conference Proceedings, 2014.
[11] MARIA D B, GUERINO G. Understanding Ultra Wide Band Radio Fundamentals [M]. Upper Saddle River: Prentice Hall, 2006: 273-310.
[12] LEE J Y, SCHOLTZ R A. Ranging in a dense multipath environment using an UWB radio link [J]. IEEE Journal on Selected Areas in Communications, 2002, 20 (9): 1677-1683.
[13] VENKATESH S, BUELLLER R M. NLOS mitigation using linear programming in ultra-wide and location-aware networks [J]. IEEE Transactions on Vehicular Technology, 2007, 56 (5): 3182-3198.
[14] MIAO H L, YU K, JUNTTI M J. Positioning for NLOS propagation: algorithm deviations and Cramer-Rao bounds [J]. IEEE Transactions on Vehicular Technology, 2007, 56 (5): 2568-2580.
[15] WEI S K, ZIMMERMANN R, WANG H. Non-line-of-sight localization in multipath environments [J]. IEEE Transactions on Mobile Computing, 2008, 7 (5): 647-660.
[16] 劉秩成. 超寬帶無線定位算法性能分析 [D]. 南京: 南京郵電大學, 2013.
LIU Z C. Performance analysis on UWB wireless positioning algorithm [D]. Nanjing: Nanjing University of Posts, 2013.
[17] 賀鵬飛. 超寬帶無線通信關鍵技術研究 [D]. 北京: 北京郵電大學, 2007.
HE P F. Working out the key technologies of ultra-wideband wireless communications [D]. Beijing: Beijing University of Posts and Telecommunications, 2007.
[18] GUVENC I, SAHINOGLU Z. Threshold selection for UWB TOA estimation based on kurtosis analysis [J]. IEEE Communications Letters, 2005, 9 (12): 1025-1027.
[19] WU S H, ZHANG Q Y, ZHANG N T. Novel threshold-based TOA estimation algorithm for IR-UWB systems [J]. Journal on Communications, 2008, 29 (7):7-13.
[20] WANG Y Y, CHEN J T, FANG W H. TST-MUSIC for joint DOA-delay estimation [J]. Signal Processing, 2001, 49 (4): 721-729.
[21] DING R, QIAN Z H, WANG X. Joint TOA and DOA estimation of IR-UWB system based on matrix pencil [C]//International Forum on Information Technology and Applications. Chengdu, 2009: 544-547.
[22] 丁銳, 錢志鴻, 王雪. 基于TOA和DOA聯合估計的UWB定位方法 [J]. 電子與信息學報, 2010, 32 (2): 313-317.
DING R, QIAN Z H, WANG X. UWB positioning system based on joint TOA and DOA estimation [J]. Journal of Electronics and Information Technology, 2010, 32 (2): 313-317.
[23] MATCOS S, MARSAL A, BENIDIR M. The propagator method for source bearing estimation [J]. Signal Processing, 1995, 42 (2): 121-138.
[24] 王方秋,張小飛. 脈沖超寬帶系統中基于改進傳播算子算法的TOA和DOA聯合估計 [J]. 電子與信息學報, 2013, 35 (12): 2954-2959.
WANG F Q, ZHANG X F. Improved propagator method-based joint TOA and DOA estimation in impulse radio ultra wide band [J]. Electronics and Information Technology, 2013, 35 (12): 2954-2959.
[25] 丁銳. 基于UWB信號時延估計的無線定位技術研究 [D]. 長春:吉林大學, 2009.
DING R. Study on wireless localization technology based on UWB signal time delay estimation [D]. Changchun: Jilin University, 2009.
研究論文
Received date: 2015-12-28.
Foundation item: supported by the Beijing Administration of Work Safety.
A UWB-based four reference vectors compensation method applied on hazardous chemicals warehouse stacking positioning
DAI Bo1, Lü Xin1,2, LIU Xuejun1, LI Zhichao1,2
(1College of Information Engineering, Beijing Institute of Petrochemical Technology, Beijing 102617, China;2College of Information Science & Technology, Beijing University of Chemical Technology, Beijing 100029, China)
Abstract:Monitoring of five distance of hazardous chemicals storage warehouse stacking (distance, pile wall distance, zenith distance, spacing and channel spacing) is an important topic in dangerous goods warehouse safety supervision. Studying high precision positioning technology of dangerous goods stacking, is the premise of automately monitoring stacking safety. In this study, the main factors affecting the accuracy of UWB positioning of dangerous chemicals storage are analyzed, and an UWB four reference vectors compensation method applied on dangerous chemicals warehouse stacking positioning is proposed. Firstly, a reference system is established, and the monitoring area is divided into rectangular grids, each vertex of grids is named as a reference point, then the error vectors UWB positioning values at the reference points are obtained, and are took as the reference vector to calibrate the target points; Secondly, UWB tags are attached to dangerous chemical goods stacking, searching the grids around the tags, and calibrating the position value of the tags by the UWB four reference vectors compensation method. Finally, the corrected coordinates are considered as the final position of stacking. The experiment showed that this method can effectively improve the positioning precision of the dangerous chemicals warehouse stacking, it is suitable for monitoring the five distance of hazardous chemicals warehouse stacking.
DOI:10.11949/j.issn.0438-1157.20151975
中圖分類號:TN 98
文獻標志碼:A
文章編號:0438—1157(2016)03—0871—07
基金項目:北京市安全生產監督管理局項目。
Corresponding author:Prof. DAI Bo, daibo@bipt.edu.cn
猜你喜歡
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17
科技視界(2016年20期)2016-09-29 13:07:14
大眾理財顧問(2016年8期)2016-09-28 14:00:43
