基于全時域勢流理論的船舶與液艙晃蕩耦合運動的數值計算
2016-05-04 18:39:04李裕龍朱仁傳繆國平
船舶力學 2016年11期
關鍵詞:船舶
李裕龍,朱仁傳,繆國平,范 菊
(上海交通大學 船舶海洋與建筑工程學院,海洋工程國家重點試驗室,上海 200240)
基于全時域勢流理論的船舶與液艙晃蕩耦合運動的數值計算
李裕龍,朱仁傳,繆國平,范 菊
(上海交通大學 船舶海洋與建筑工程學院,海洋工程國家重點試驗室,上海 200240)
基于三維線性有航速時域勢流理論計算船體時域運動外域波浪力,同時采用三維全非線性時域勢流理論來計算艙內液體的非線性晃蕩所誘導力與力矩,進而建立了波浪中載液船舶耦合運動方程。該方法能夠完整地考慮波浪、船體和液艙晃蕩之間的實時耦合作用。研究結果表明:通過模型實驗和數值模擬計算的對比,數值模擬計算能夠清晰顯現出液艙晃蕩對船體全局運動影響,無航速船體運動RAO與模型實驗結果吻合良好,有航速運動計算合乎預期。
液艙晃蕩;耦合運動;非線性時域;有航速理論
0 引 言
船舶在波浪上的運動激勵液艙內的液體產生晃蕩,液艙晃蕩誘導的沖擊力同時作用在艙壁上,進而影響到船舶的運動姿態。船舶運動與液艙晃蕩之間的耦合效應研究一直是船舶與海洋工程界一直關注的問題,合適且高效的理論與數值計算方法對探討分析船舶運動與液艙晃蕩之間的耦合效應是十分重要的。目前國內外許多學者已對船舶運動與液艙晃蕩之間耦合效應進行了一些分析與研究工作[1-3],綜合來說,基于勢流理論的耦合效應的相關研究主要可分為兩種途徑:相關領域的模型試驗研究[4],以及用來輔助實驗研究且專門針對本問題的數值計算工作[5-6]。
船舶在波浪上的運動計算是船舶與海洋工程領域的經典問題。如果考慮到晃蕩流體的非線性作用,則需要在時域下來分析船舶運動。時域三維Rankine源邊界元方法相對于復雜時域格林函數方法,雖然其需要加以粘性處理輻射面,或者是借助于匹配面的方法處理艦船時域遠場波浪,但其編程相對簡單以及其對船型幾何外形適應性更強的優點仍然在學術界引起足夠重視。本文使用時域三維Rankine源邊界元方法以及脈沖響應理論模擬時域艦船有航速運動。
液艙流體晃蕩問題在學術界與工程界中同樣是經典的水動力學問題。自從液化天然氣船等載液高附加值船舶的迅速發展,液艙流體晃蕩業已成為水動力學研究工作的熱點問題。已有很多學者分別采用了頻域勢流理論、時域非線性勢流理論、粘性流理論方法來研究模擬液艙晃蕩問題及其誘導的水動力砰擊載荷。本文采用時域非線性勢流理論,藉此配合艦船時域線性有航速勢流理論,構建了完全時域下的艦船耦合液艙晃蕩時域運動計算方法,為基于勢流理論研究艦船耦合液艙晃蕩現象提供了新的途徑。
本文將船舶在波浪上的運動問題和液艙內液體晃蕩問題采用不同的時域勢流理論求解,船舶的運動采用基于脈沖響應函數理論的三維線性有航速時域勢流理論,計算首先需要求得有航速水動力系數以及脈沖響應函數,以及時域下的繞射問題,進而求解時域有航速艦船時域運動方程。本文同時應用三維非線性時域勢流理論模擬非線性液艙晃蕩問題,將實時誘導力與力矩在同一時刻添加入船舶有航速時域運動方程,從而建立了載液船舶在波浪上運動的有航速時域運動方程。這種方法在零航速時刻能夠模擬常見的無航速計算工況與載液浮式結構物的運動響應,同時能夠進行有航速的載液艦船時域運動模擬,具有很好的適用范圍。通過對加載方形液艙的S175船模進行耦合運動的數值模擬及與實驗結果的對比,以及有航速艦船的數值計算結果,驗證了本文數值計算方法的準確性,表明使用本文提出的方法進行載液有航速艦船時域運動是完全可行的。基于此本文通過對一艘載液15000GT船橫搖運動進行了計算分析,更進一步的拓展了計算代碼的實用性與可靠性。
1 載液船舶耦合運動相關基本理論
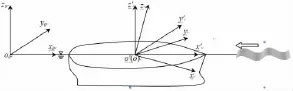
圖1 船體運動的縱坐標系示意圖Fig.1 The coordinate system of ship motion
1.1 載液船舶在波浪上的運動
本文采用勢流理論求解船舶在波浪上的運動。這里給出加載液艙的船舶在波浪上運動滿足的數學模型。線性入射波速度勢有以下形式:
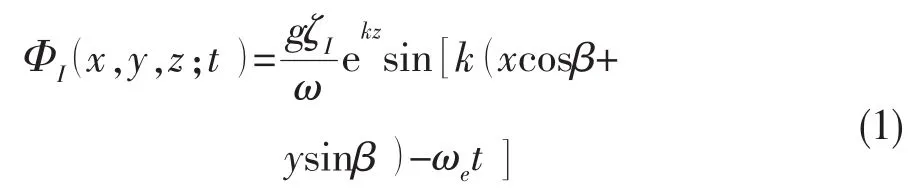
式中:ζI,ω,k分別為入射波的波幅,自然頻率與波數,ωe為遭遇頻率。定義隨船體運動的笛卡爾坐標系坐標系示意圖見圖1。在規則波激勵下船舶保持固定的航速作六自由度運動。
本文采用三維有航速時域勢流理論求解外域流場的速度勢函數。船舶運動輻射問題速度勢所滿足的流場邊界條件如下:
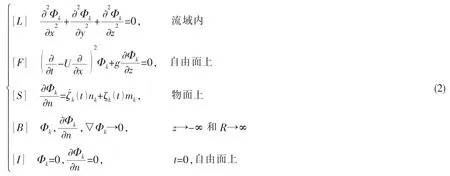
根據時域分析的脈沖響應方法,能夠將輻射勢進一步為瞬時項和記憶項。在線性系統下,時域輻射系統的輸入為浮體的k模態的運動速度。假定浮體的初始位移則輻射問題的物面條件能夠有如下的表達式[7]:

輻射勢的脈沖響應函數根據物面條件分解如下:

進而便可獲得艦船輻射運動的輻射力:

其中:附加質量μjk取決于船體的外表面幾何形狀,bjk和cjk取決于船的幾何形狀和船速。較為復雜的記憶效應體現在時延函數中,其取決于船體外表面的的幾何外形與航行速度。
同樣,將波浪的運動視為簡諧運動,且將入射波波高ζI作為繞射系統的輸入,同樣使用脈沖響應理論求解繞射問題,便可求得艦船運動的外部波浪力。

1.2 基于三維全非線性勢流理論的液艙晃蕩問題
本文選取動坐標系作為計算坐標系,其優勢在于壁面相對于動坐標系保持靜止,這樣便給勢流計算帶來不少便利。液艙動坐標系如圖2所示。

圖2 所選液艙坐標系示意圖Fig.2 The coordinate system of the tank
速度勢函數滿足的控制即拉普拉斯方程如下:
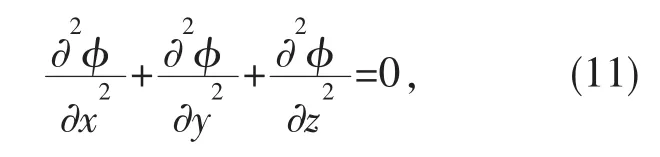
在流域內
自由表面上動力學邊界條件:
自由表面上運動學邊界條件:

艙壁上的邊界條件:


為了要計算實時自由面的變化,自然必須計及自由液面處的速度勢和波高隨時間的變化。不同時刻的自由面升高與速度勢,需要采用時間的差分方式來計算。得到邊界上每點的速度勢后,根據非線性拉格朗日方程:

便能夠方便計算出邊界處該時刻的壓力。通過將壓力沿著液艙所有壁面的積分就能夠計算當前時刻液艙晃蕩對壁面誘導的晃蕩力與力矩。在計算中同時需要實時對自由液面進行光順化處理。
2 載液船舶在波浪上時域運動的數值算法
在液艙晃蕩問題的非定常計算求解過程中,在某一計算時刻通過對液艙壁面的壓力積分可以得到當前時刻下液艙晃蕩在艙壁上誘導的水動力幅值。晃蕩誘導的水動力進而會影響到船舶的運動姿態,因此載液船舶時域運動方程需要在當前時間步下建立。耦合液艙晃蕩作用下的時域船舶全局運動方程有如下形式:

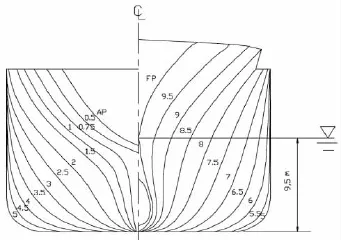
圖3 S175船型線Fig.3 Main parameters of LNG ship
3 數值計算
3.1 S175船模主尺度與有航速時域計算
數值計算工作采用的是高速集裝箱船型S175,其船型線見圖3所示。其無航速船舶耦合液艙晃蕩的模型試驗是在中國船舶科學研究中心耐波性水池中進行[8],試驗模型是一條加載了一個方形液艙的S175船模,模型與實船的縮尺比為1:55,其具體的主尺度參數見表1。

表1 LNG主尺度Tab.1 Principal dimensions of LNG
所加載的液艙為方形液艙,其尺寸和安裝位置見圖4。液艙長度為600 mm,寬度為300 mm,高度為250 mm,艙內液體的深度為125 mm,液艙重心位置與船模重心位置重合。
圖5和圖6給出了S175船的時域運動響應幅值的數值計算結果與實驗結果的對比。數值結果與實驗結果兩者吻合良好。無論是水動力系數還是幅值響應,計算程序都能夠給出較為令人滿意的計算結果。這驗證了有航速時域計算的有效性。
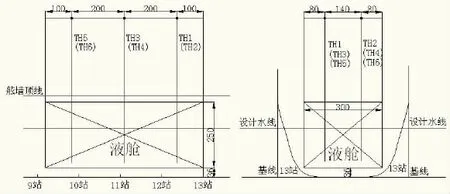
圖4 加載液艙的尺寸與位置Fig.4 Size and location of tank

圖5 迎浪工況下數值與實驗所得的S175船模垂蕩RAOFig.5 Comparison of heave RAO of ship in head sea by experiment and calculation

圖6 迎浪工況下數值與實驗所得的S175船模縱搖RAOFig.6 Comparison of Pitch RAO of ship in head sea by experiment and calculation
3.2 無航速耦合液艙晃蕩船舶時域運動的數值計算
本節給出S175船舶在無航速情況下的計算結果與模型實驗結果作為耦合計算的驗證。這里將有航速耦合計算程序中的航速設為零。為了驗證程序的有效性,這里給出了S175船的無航速的RAO曲線與實驗結果的對比。可以預計,在無航速下的結果如果能夠符合實驗結果,便可以首先驗證時域運動方程與液艙晃蕩問題計算無誤。這里就加載了方形液艙的S175船模,在迎浪和橫浪兩個工況下進行了無航速耦合運動的時域數值計算。
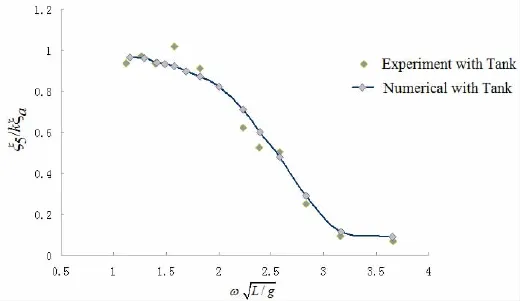
圖7 迎浪工況下數值與實驗所得的S175船模縱搖RAOFig.7 Comparison of pitch RAO of ship in head sea by experiment and calculation

圖8 橫浪工況下數值與實驗所得的S175船模橫搖RAOFig.8 Comparison of roll RAO of ship in head sea by experiment and calculation
從圖中可以看出數值計算與模型實驗的結果同樣吻合較好,在此階段驗證了耦合計算程序中液艙晃蕩模塊與耦合計算模塊的有效性,并且經由有航速船舶的計算結果的準確性,便能夠預測出本文提出的有航速船舶耦合液艙晃蕩時域計算方法的可靠與有效性。
3.3 有航速耦合液艙晃蕩船舶時域運動的數值計算
在上一節無航速計算結果準確的基礎上,以及有航速時域數值計算能夠保證計算精度的前提下,便可以方便地進行有航速船舶耦合液艙晃蕩的時域數值計算工作。圖9至圖12給出了不同航速下船舶耦合液艙晃蕩時域運動的縱搖以及橫搖模態的響應曲線。
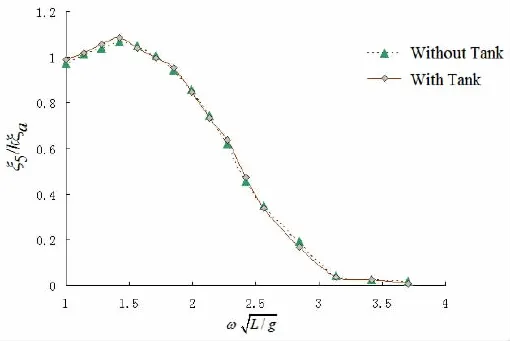
圖9 迎浪工況下加載與不加載液艙所得的S175船模縱搖RAO(Fn=0.10)Fig.9 Comparison of pitch RAO of ship in head sea of with tank and without tank(Fn=0.10)

圖10 橫浪工況下加載與不加載液艙所得的S175船模橫搖RAO(Fn=0.10)Fig.10 Comparison of roll RAO of ship in head sea of with tank and without tank(Fn=0.10)
在圖9至圖12中給出了加載液艙有航速S175船橫搖與縱搖的運動響應曲線,其中為了對比同時給出了不加載液艙的S175船的時域運動曲線。在RAO中的橫坐標的ω為波浪自然頻率。從計算結果可以看出,液艙晃蕩對于不同航速下船舶的縱向運動影響不是很大,并且在計算中觀察到垂蕩運動所受液艙晃蕩的影響也并不明顯,但是隨著船舶的縱向艙室加多或者幾何形狀的改變對縱搖的影響需要在實際計算中加以確定。而在船舶的有航速橫浪運動時,其運動規律與無航速時趨勢大致相同。加載液艙船舶在低于船舶自身的橫搖自振頻率下運動響應高于不加載液艙的運動幅值,其峰值也大于無載液船舶橫搖運動峰值,其原因是此時液艙所誘導的力矩與船舶的波浪誘導力矩幅值疊加所造成的。并且從上一節可以看到,本文的無航速計算結果同實驗結果對比良好,即這種數值方法可以直接對無航速載液船舶的時域運動響應進行預報。
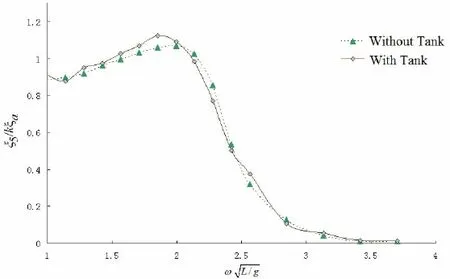
圖11 迎浪工況下加載與不加載液艙所得的S175船模縱搖RAO(Fn=0.30)Fig.11 Comparison of pitch RAO of ship in head sea of with tank and without tank(Fn=0.30)
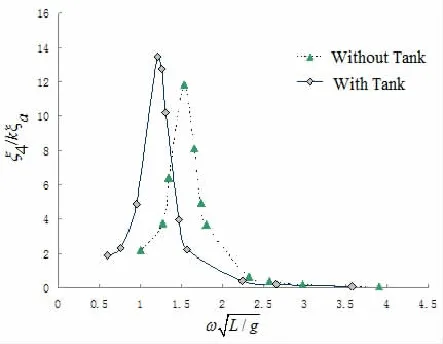
圖12 橫浪工況下加載與不加載液艙所得的S175船模橫搖RAO(Fn=0.30)Fig.12 Comparison of roll RAO of ship in head sea of with tank and without tank(Fn=0.30)
3.4 載液15000GT集裝箱船橫搖運動時域數值計算
為了拓展計算代碼的實用性,本文選取了一艘具有實驗數據的集裝箱船15000GT作為計算算例[9],針對不同加載深度的液艙與15000GT船模的耦合橫搖運動做了數值計算研究。圖13是15000GT的邊界元計算網格。
模型試驗中對船舶在無航速規則波作用下的橫向運動響應做了測量與分析。液艙尺寸與幾何位置見表2和圖14。模型試驗重點在于測量不同深度裝載的液艙對橫搖運動的影響,并且對于不加載液艙的船模在同樣來波工況中的運動響應做了測量。加載不同深度的液艙的模型工況見表3。

圖13 15000GT船邊界元計算網格Fig.13 The boundary mesh of 15000GT container ship
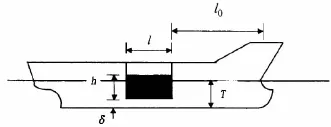
圖14 液艙位置簡圖Fig.14 Schematic profile of the rectangle tank
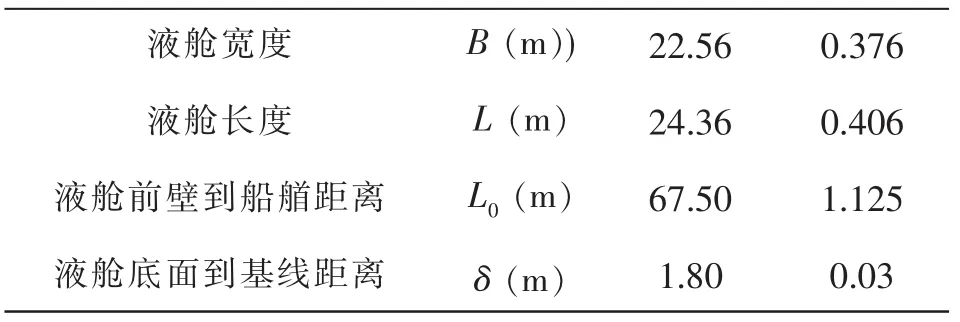
表2 液艙的幾何尺寸與位置Tabl.2 Main dimension of rectangle tank
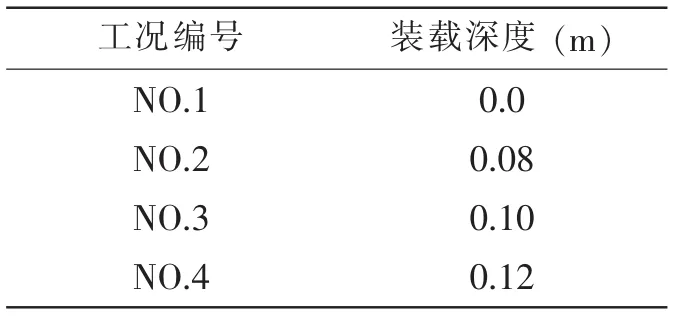
表3 模型試驗工況Tab.3 Experiment parameters
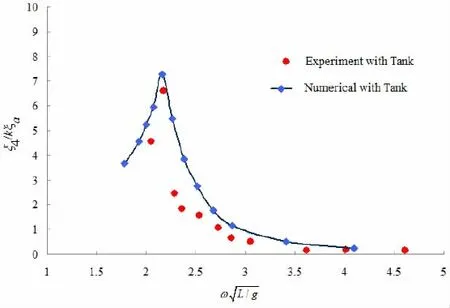
圖15 水深8 cm液艙15000GT集裝箱船橫搖RAOFig.15 Roll RAO of 15000GT container ship model with 8 cm depth liquid tank
圖15-17為在液艙不同裝載深度下的船模橫搖運動RAO曲線與實驗值的對比結果,如圖所示數值計算結果趨勢與實驗結果吻合良好,驗證了本文所提出的數值計算方法對于不同工況橫搖運動計算的可行性,拓展并延伸了計算代碼的實用性。
從圖15-17可以看出,不同裝載下的液艙對橫搖運動有著很大的影響,且程度隨裝載的深度的增加而增大。首先是幅值,隨著裝載深度的增加,其幅值逐漸減小,其原因是液艙誘導的內部力隨著裝載深度的增加而增大,且由于液艙幾何外形所致,在當前激勵頻率下其相位與波浪所激勵的外部力的相位一直有著180度左右的偏差,其合成作用便是減小船舶受到的外部力,因此船舶的橫搖幅值逐漸減小。并且隨著裝載深度的增加,液艙內部的液體的固有頻率也會逐漸變化,并且與當前運動模態的自由液面尺度相關,并且晃蕩隨著激勵頻率接近共振頻率時,其液面高度隨時間的變化會頗為劇烈,當前裝載下所誘導的最大波面升高所包含的非線性因素也會影響船舶的橫搖共振頻率。并且由于液艙內部液體的形狀隨著運動的幅值會逐漸變化,從簡單的角度來說液艙內部液體的重心由于液體形狀變化同樣產生偏移,這樣便致使船舶的穩心同樣會發生變化,因此橫搖運動自然會受到不同程度的影響。
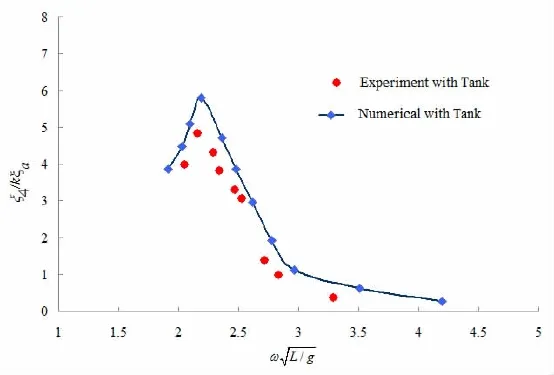
圖16 水深10 cm液艙15000GT集裝箱船橫搖RAOFig.16 Roll RAO of 15000GT container ship model with 10 cm depth liquid tank

圖17 水深12 cm液艙15000GT集裝箱船橫搖RAOFig.17 Roll RAO of 15000GT container ship model with 12 cm depth liquid tank
4 結 論
本文在成功地將船舶在波浪上運動和液艙內液體晃蕩問題分析同時采用時域勢流理論求解。時域船舶運動問題采用基于勢流理論的脈沖響應函數及Rankine源邊界元法求解,非定常液艙晃蕩問題采用非線性時域勢流理論和Rankine源邊界元方法求解。本文基于目前的研究結果,能夠得出以下結論:
液艙晃蕩效應對載液船舶在波浪上的運動有著較為重要的影響,特別是對于橫浪工況下的橫搖運動。船舶運動的遭遇頻率在船舶響應頻率范圍附近時,液艙晃蕩誘導的橫搖力矩同波浪誘導的橫搖力矩之間的相位差在一定程度上減小了船舶橫搖運動的幅值。在較低頻率的入射波激勵下,液艙晃蕩誘導的橫搖力矩同波浪誘導的橫搖力矩之間的相位差較小,兩種橫搖力矩的疊加會增大船舶的橫搖運動幅值。在橫浪工況下,液艙晃蕩對船舶的垂蕩運動影響較小。在迎浪工況下,隨著航速提高,本文所取算例來看液艙晃蕩所誘導的外力與外力矩對船舶的垂蕩與縱搖等縱向運動的幅值影響均比較小。
本文采用的數值計算方法適用于計算分析載液船舶在波浪上的時域運動,不僅適用于船舶的無航速時域運動,同樣還可以適用和拓展到有航速的船舶時域運動。本研究所用的計算液艙的幾何形狀規則,而其他各異的幾何形狀的液艙,與不同類型的液艙布置,均會對載液船舶運動造成不同的影響,其運動規律取決于船舶的幾何外形與航行工況。因此本文所得出的結論證明了開發的計算程序的準確性,但是對于不同類型的載液船舶由于其幾何因素與設計理念差異頗大,本文的計算結論對其他各異的載液船型應該不具有完全的推廣性,針對不同的船舶需要更進一步的詳細計算。
本文方法由于基于脈沖響應函數方法,具有較高的計算效率,數值計算與試驗結果吻合良好,為設計載液船舶或減搖水艙等的前期設計提供了快速有效的分析方法和技術手段。這種方法的局限性在于無法處理自由液面破碎等強非線性現象,但可以較好地預報船體與液艙晃蕩耦合運動的共振頻率區間與基本幅值。
[1]Kim Kyung sung,Kim Moo Hyun.Sloshing effects on Multi-Vessel motions by using moving particle simulation[C]//Proceedings of the 21th International Offshore and Polar Engineering Conference,June 19-24,2011.Maui,Hawaii,USA, 2011:39-45.
[2]Huang Z J,Danaczko M A,Esenkov O E,Martin C B,et al.Coupled tank sloshing and LNG carrier motions[C]//Proceedings of the 19th International Offshore and Polar Engineering Conference,June 21-26,2009.Osaka,Japan,2009: 92-99.
[3]Wang X,Arai Makoto.A study on coupling effect between sea-keeping and sloshing for membrane-type LNG carrier[C]// Proceedings of the 20th International Offshore and Polar Engineering Conference,June 20-25,2010.Beijing,China, 2010:245-251.
[4]Nam Bo-Woo,Kim Yonghwan,Kim Dae-Woong,Kim Yong-soo.Experimental and numerical studies on ship motion responses coupled with sloshing in waves[J].Journal of Ship Research,2009,53(2):68-82.
[5]Tabri Kristjan,Matusiak Jerzy,Varsta Petri.Sloshing interaction in ship collisions-An experimental and numerical study [J].Ocean Engineering,2009,36:1366-1376.
[6]Kaminski Miroslaw Lech,Bogaert Hannes.Full scale sloshing impact tests[C]//Proceedings of the 19th International Offshore and Polar Engineering Conference,June 21-26,2009.Osaka,Japan,2009:125-134.
[7]戴遺山,段文洋.船舶在波浪中運動的時域理論[M].北京:國防工業出版社,2008.
[8]鄒 康.耦合液艙晃蕩的船舶運動性能研究[D].鎮江:江蘇科技大學,2009.
[9]洪 亮,朱仁傳,繆國平,范 菊.波浪中船體與液艙晃蕩耦合運動的時域數值計算[J].哈爾濱工程大學學報,2012, 33(5):635-641.
Numerical method of ship motions coupled with tank sloshing based on fully time domain potential flow theory
LI Yu-long,ZHU Ren-chuan,MIAO Guo-ping,FAN Ju
(The State Key Laboratory of Ocean Engineering,School of Naval Architecture,Ocean and Civil Engineering, Shanghai Jiao Tong University,Shanghai 200240,China)
Based on three dimensional time domain potential theory,ship motion is solved by using an impulse response function method and boundary element method.Using three dimensional fully nonlinear time domain potential theory to simulate the nonlinear tank sloshing.Then the ship motion coupled with tank sloshing is established that the interactions of wave,ship body and tank sloshing are completely taken into considerations.Numerical simulation and experimental studies indicate that the numerical results of ship motion coupled with tank sloshing can clearly show the coupling effect of tank sloshing on the ship global motion.The results of the ship motion RAO of both computational and experiment ones are in good agreement, the numerical result of ship which has forward speed with liquid tank is also agreed with expectation.
tank sloshing;coupling motion;nonlinear time domain;ship speed
O35
A
10.3969/j.issn.1007-7294.2016.07.003
1007-7294(2016)11-1369-12
2016-01-09
工業和信息化部高技術船舶科研項目資助(2007K24161)
李裕龍(1985-),男,博士研究生;朱仁傳(1969-),男,教授,博士生導師,通訊作者,E-mail:renchuan@sjtu.edu.cn。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30