分布式電驅(qū)動車車速及路面附著系數(shù)融合估計(jì)*
2016-04-21 01:30:21高博麟謝書港龔進(jìn)峰
汽車工程 2016年2期
高博麟,陳 慧,謝書港,龔進(jìn)峰
(1.天津大學(xué)機(jī)械工程學(xué)院,天津 300072; 2.中國汽車技術(shù)研究中心,天津 300300; 3.同濟(jì)大學(xué)汽車學(xué)院,上海 201804)
2016035
分布式電驅(qū)動車車速及路面附著系數(shù)融合估計(jì)*
高博麟1,2,3,陳 慧3,謝書港2,龔進(jìn)峰2
(1.天津大學(xué)機(jī)械工程學(xué)院,天津 300072; 2.中國汽車技術(shù)研究中心,天津 300300; 3.同濟(jì)大學(xué)汽車學(xué)院,上海 201804)
基于縱向車速融合估計(jì)器,結(jié)合分布式驅(qū)動電動汽車的優(yōu)勢,采用多種估計(jì)方法,建立了路面峰值附著系數(shù)融合估計(jì)器,并進(jìn)行了實(shí)車試驗(yàn)驗(yàn)證。結(jié)果表明,建立的基于雙卡爾曼濾波技術(shù)的車速及路面峰值附著系數(shù)融合估計(jì)系統(tǒng),擴(kuò)大了路面峰值附著系數(shù)估計(jì)的適用工況范圍,保證了縱向車速估計(jì)的精度。
分布式驅(qū)動電動汽車;雙卡爾曼濾波;車速估計(jì);路面峰值附著系數(shù);融合估計(jì)
前言
高性能分布式驅(qū)動電動汽車的車輛穩(wěn)定性控制已經(jīng)成為汽車動力學(xué)控制領(lǐng)域的熱點(diǎn)問題,其中車速和路面峰值附著系數(shù)的準(zhǔn)確獲取是關(guān)鍵技術(shù)之一。
分布式驅(qū)動電動汽車的電機(jī)集成在輪邊或輪轂內(nèi),相對傳統(tǒng)汽車具有以下特點(diǎn)[1]:①電機(jī)轉(zhuǎn)矩大小可以觀測,為準(zhǔn)確估計(jì)車速提供了可能;②四輪縱向力的實(shí)時估計(jì)準(zhǔn)確,有利于提高路面峰值附著系數(shù)估計(jì)的精度和擴(kuò)大適用工況范圍。
根據(jù)估計(jì)模型不同,車速的估計(jì)方法可以分為運(yùn)動學(xué)估計(jì)方法和動力學(xué)估計(jì)方法[2]。運(yùn)動學(xué)估計(jì)方法包括輪速法和直接積分法。輪速法又可以分為最大(小)輪速法、斜率法和綜合法等[3]。文獻(xiàn)[4]和文獻(xiàn)[5]中采用輪速法和直接積分法相互融合的方法,對縱向車速進(jìn)行估計(jì)。動力學(xué)估計(jì)方法的核心在于對輪胎縱向驅(qū)動力和制動力的估計(jì),因此又可分為兩類:①基于半經(jīng)驗(yàn)輪胎模型[6]的縱向力估計(jì),依賴于對路面峰值附著系數(shù)的準(zhǔn)確獲取;②基于車輪動力學(xué)模型的縱向力估計(jì)[7],不依賴于路面附著條件[8],但須要準(zhǔn)確獲取車輪驅(qū)制動轉(zhuǎn)矩。
結(jié)合運(yùn)動學(xué)估計(jì)方法和動力學(xué)方法的優(yōu)缺點(diǎn),文獻(xiàn)[9]中設(shè)計(jì)了車速的融合估計(jì)方法,但在車輪制動抱死工況中,如果無法事先獲取路面附著條件,仍然無法準(zhǔn)確估計(jì)車速。為了彌補(bǔ)文獻(xiàn)[9]中在上述工況中的不足,本文中基于雙卡爾曼濾波技術(shù)建立了路面峰值附著系數(shù)融合估計(jì)器,構(gòu)建了車速及路面峰值附著系數(shù)融合估計(jì)系統(tǒng),并通過實(shí)車試驗(yàn),驗(yàn)證了構(gòu)建的融合估計(jì)系統(tǒng)的有效性。
1 估計(jì)系統(tǒng)搭建
1.1 整體架構(gòu)
首先,針對分布式電驅(qū)動車的結(jié)構(gòu)特點(diǎn),基于聯(lián)邦卡爾曼濾波技術(shù),構(gòu)建了多方法融合的縱向車速融合估計(jì)器[9],其中包括基于平均輪速法的子濾波器Vx-LF1、基于簡化魔術(shù)輪胎公式的子濾波器Vx-LF2和基于車輪動力學(xué)模型的子濾波器Vx-LF3。
由于單一估計(jì)方法都有各自的優(yōu)點(diǎn)和不足,基于平均輪速法的Vx-LF1在長時間尺度下計(jì)算結(jié)果的可靠性是動力學(xué)方法所不具備的;而在劇烈的驅(qū)制動工況下,基于簡化魔術(shù)公式的Vx-LF2具有很好的優(yōu)勢,但缺點(diǎn)是對路面附著條件和輪胎橫縱向滑移率的依賴性較高;在車輪制動抱死的情況下,Vx-LF3的估計(jì)結(jié)果不再適用。因此,在車輪不抱死的情況下,能夠盡可能多地利用基于車輪動力學(xué)的Vx-LF3估計(jì)縱向車速,可以最大程度地發(fā)揮動力學(xué)方法的優(yōu)勢,而這也恰恰是分布式驅(qū)動電動汽車的優(yōu)勢所在。
因此,在主濾波器中設(shè)計(jì)了縱向車速子濾波器信息分配規(guī)則,使各個子濾波器的適用工況能夠互補(bǔ),從而構(gòu)建了縱向車速融合估計(jì)器,其原理結(jié)構(gòu)如圖1所示。
在事先設(shè)置正確的路面峰值附著系數(shù)信息的條件下,對縱向車速融合估計(jì)器進(jìn)行了仿真結(jié)果和實(shí)車試驗(yàn)驗(yàn)證。結(jié)果顯示:相對于單一的縱向車速估計(jì)方法,構(gòu)建的縱向車速融合估計(jì)器擴(kuò)大了縱向車速估計(jì)的適用工況范圍,且在對接路面的緊急制動工況中,縱向車速的最大估計(jì)誤差不超過0.5m/s。
由于子濾波器Vx-LF2在估計(jì)過程中需要事先獲取準(zhǔn)確的路面峰值附著系數(shù),否則在制動抱死工況下,縱向車速融合估計(jì)器仍然無法準(zhǔn)確估計(jì)縱向車速,難以滿足實(shí)際主動安全系統(tǒng)的工作需求。因此,在縱向車速融合估計(jì)器的基礎(chǔ)上,采用多方法融合的思路,建立路面峰值附著系數(shù)融合估計(jì)器,構(gòu)建車速及路面參數(shù)融合估計(jì)系統(tǒng),其架構(gòu)如圖2所示。

1.2 基于Vx-LF2的子濾波器μ-LF1

根據(jù)雙卡爾曼濾波原理,結(jié)合Vx-LF2,μ-LF1的狀態(tài)空間方程為
(1)
該子濾波器的狀態(tài)向量為
(2)
觀測器的輸出方程為
(3)
基于式(1)~式(3),建立卡爾曼子濾波器μ-LF1。卡爾曼濾波器的構(gòu)建過程參見文獻(xiàn)[11]。
1.3 基于Vx-LF3的子濾波器μ-LF2
Vx-LF3是基于車輪動力學(xué)模型的子濾波器。輪胎縱向附著特性處于強(qiáng)非線性階段時,輪胎的利用附著系數(shù)與峰值附著系數(shù)近似相等,因此,通過引入Vx-LF3的縱向力估計(jì)結(jié)果,基于利用附著系數(shù)的定義構(gòu)建估計(jì)模型:
(4)
基于式(4),建立該子濾波器的狀態(tài)空間方程:
(5)
輸入變量為
狀態(tài)變量為
(6)
子濾波器的輸出方程為
(7)
基于式(4)~式(7),建立卡爾曼子濾波器μ-LF2,構(gòu)建過程參見文獻(xiàn)[11]。
1.4 路面峰值附著系數(shù)融合主濾波器
主濾波器主要完成兩項(xiàng)工作:
(1)判斷當(dāng)前車輛行駛工況,根據(jù)子濾波器權(quán)重分配規(guī)則,分配各子濾波器和主濾波器的權(quán)重系數(shù);
(2)根據(jù)權(quán)重分配系數(shù),對子濾波器的各局部估計(jì)結(jié)果進(jìn)行加權(quán)融合,得到全局融合的估計(jì)結(jié)果。
如表1所示,在路面峰值附著系數(shù)融合估計(jì)器中,子濾波器有各自適用的工況;主濾波器μ-MF則不斷存儲上一工作循環(huán)的路面峰值附著系數(shù)的融合估計(jì)結(jié)果。

表1 附著系數(shù)估計(jì)子濾波器適用工況對比
注:×表示不適用,O表示適用。
此外,如果液壓制動轉(zhuǎn)矩不可獲取,在有液壓制動系統(tǒng)參與的制動工況中,μ-LF2就無法準(zhǔn)確估計(jì)路面峰值附著系數(shù)。因此,為了充分利用μ-LF1和μ-LF2的特點(diǎn),擴(kuò)大融合估計(jì)器的工作范圍,建立了如圖3所示的子濾波器權(quán)重分配規(guī)則。
2 實(shí)車試驗(yàn)驗(yàn)證
分布式驅(qū)動電動汽車試驗(yàn)平臺如圖4所示,其具體參數(shù)規(guī)格見表2。
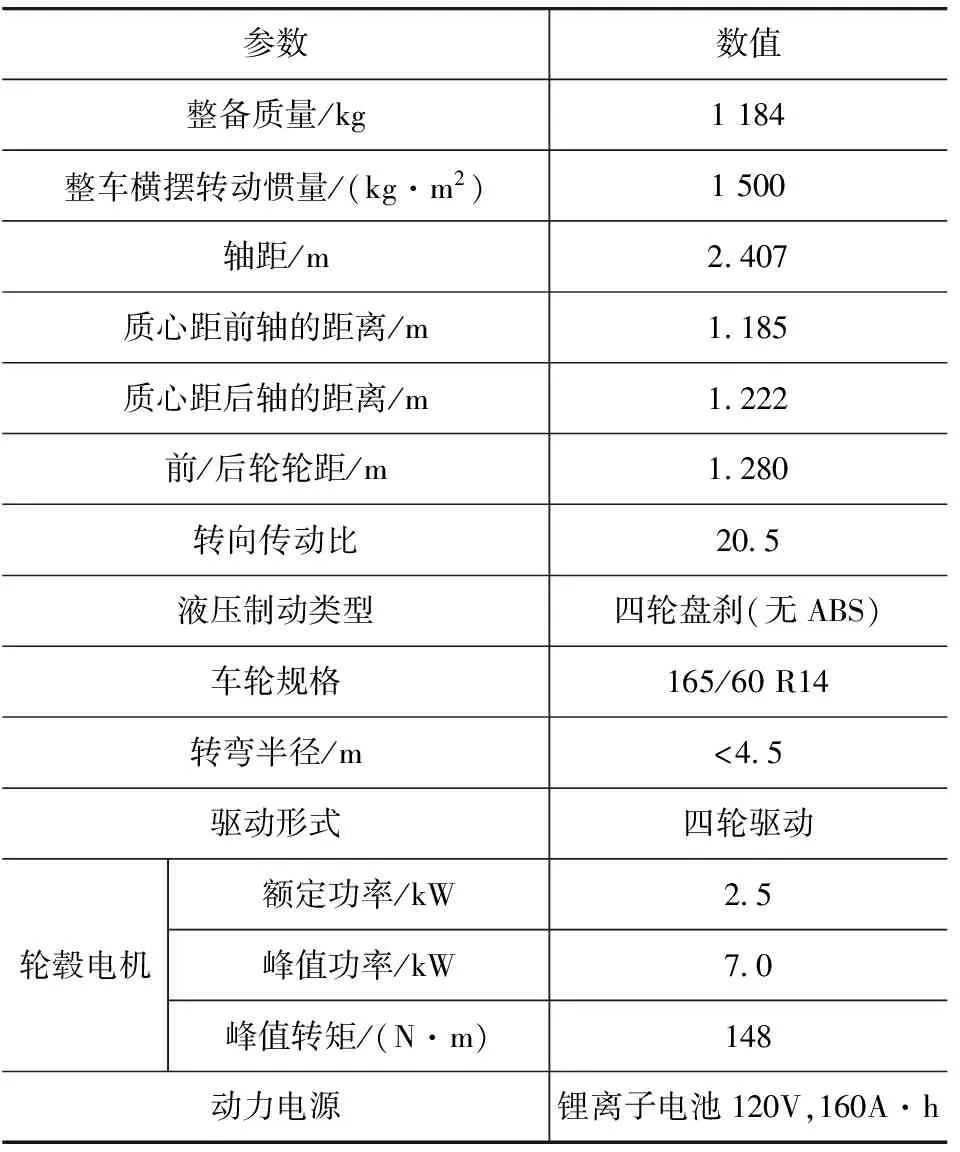
參數(shù)數(shù)值整備質(zhì)量/kg1184整車橫擺轉(zhuǎn)動慣量/(kg·m2)1500軸距/m2 407質(zhì)心距前軸的距離/m1 185質(zhì)心距后軸的距離/m1 222前/后輪輪距/m1 280轉(zhuǎn)向傳動比20 5液壓制動類型四輪盤剎(無ABS)車輪規(guī)格165/60R14轉(zhuǎn)彎半徑/m<4 5驅(qū)動形式四輪驅(qū)動輪轂電機(jī)額定功率/kW2 5峰值功率/kW7 0峰值轉(zhuǎn)矩/(N·m)148動力電源鋰離子電池120V,160A·h
設(shè)計(jì)如圖5所示的緊急加速-制動試驗(yàn)工況,在圖中灰色區(qū)域,鋪灑沙礫,降低該區(qū)域的路面峰值附著系數(shù)(μ≤0.6),以確保車輛在該區(qū)域內(nèi)制動可以將車輪抱死。試驗(yàn)過程中,車速及路面峰值附著系數(shù)融合估計(jì)系統(tǒng)未事先獲取路面峰值附著系數(shù),最終車速和路面峰值附著系數(shù)的估計(jì)結(jié)果如圖6和圖7所示。
由圖可見:第9.5s之前,車輛在高附著系數(shù)路面上,主濾波器始終將權(quán)重分配給μ-MF,因此,其輸出結(jié)果保持初始值μ=1,此時縱向車速的融合估計(jì)的絕對誤差小于0.27m/s;從第9.5s開始,車輛進(jìn)入沙礫路面,車輪發(fā)生制動抱死,μ-LF1得到了全部的權(quán)重分配系數(shù),其估計(jì)結(jié)果迅速收斂到μ=0.5附近,使縱向車速的融合估計(jì)誤差小于0.23m/s;第11s之后,車輛重新回到高附著系數(shù)路面,車輪不再制動抱死,主濾波器再次將權(quán)重系數(shù)重新分配給μ-MF,盡管此時μ的估計(jì)結(jié)果未能再收斂到0.8,但由于車輛已經(jīng)停止,因此,對車速估計(jì)不產(chǎn)生影響。
在事先未知路面峰值附著系數(shù)的情況下,縱向車速的最大絕對估計(jì)誤差仍然未超過0.5m/s,估計(jì)準(zhǔn)確度相比于文獻(xiàn)[9]中的估計(jì)結(jié)果沒有下降,路面峰值附著系數(shù)估計(jì)結(jié)果與試驗(yàn)路面附著條件吻合,證明了建立的車速及路面峰值附著系數(shù)融合估計(jì)的有效性。
3 結(jié)論
(1)基于縱向車速融合估計(jì)器,融合多種估計(jì)方法,充分結(jié)合了分布式驅(qū)動電動汽車的特點(diǎn),采用雙卡爾曼濾波技術(shù),建立了路面峰值附著系數(shù)融合估計(jì)器,設(shè)計(jì)了子濾波器的權(quán)重分配規(guī)則,構(gòu)建起車速及路面峰值附著系數(shù)融合估計(jì)系統(tǒng)。
(2)在對接路面附著條件的道路上,進(jìn)行緊急加速-制動試驗(yàn),結(jié)果表明,建立的車速及路面峰值附著系數(shù)融合估計(jì)系統(tǒng),擴(kuò)大了路面峰值附著系數(shù)估計(jì)的適用工況范圍,保證了縱向車速的估計(jì)精度。
[1] 陳慧,高博麟,徐帆.車輛質(zhì)心側(cè)偏角估計(jì)綜述[J]. 機(jī)械工程學(xué)報, 2013,49 (24).
[2] 余卓平,高曉杰.車輛行駛過程中的狀態(tài)估計(jì)問題綜述[J]. 機(jī)械工程學(xué)報, 2009, 45(5).
[3] 吳偉先. 國產(chǎn)ESP開發(fā)技術(shù)研究—基于壓力函數(shù)的控制邏輯分析[D].廣州:華南理工大學(xué)交通學(xué)院,2003.
[4] Fredrik Gustafsson, Stefan Ahlqvist, Urban Forssell,et al. Sensor Fusion for Accurate Computation of Yaw Rate and Absolute Velocity[C]. SAE Paper 2001-01-1064.
[5] DAISS A,KIENCKE U. Estimation of Vehicle Speed Fuzzy-estimation in Comparison with Kalman-filtering[C].Control Applications, 1995, Proceedings of the 4th IEEE Conference.
[6] JOHN T Tielking, NAVEEN K Mital.A Comparative Evaluation of Five Traction Tire Models[R]. Interim Document 6,Jan.1974,Highway Safety Research Institute, University of Michigan.
[7] ANTON T Van Zanten, Rainer Erhardt. Control Aspects of the Bosch-VDC[C]. Proc. of AVEC 1996, Aachen, Germany, 1996:573-608.
[8] Kiyoshi Fujii, Hiroshi Fujimoto. Traction Control Based on Slip Ratio Estimation Without Detecting Vehicle Speed for Electric Vehicle[C]. Proc. Power Conversion Conference (PCC2007) , Nagoya.
[9] GAO Bolin, CHEN Hui, CHEN Wei, et al. Longitudinal Velocity Estimation of Electric Vehicle with 4 In-Wheel Motors Based on the Fusion of Kinematics and Dynamics Methods[C]. Proceedings of the International Conference on Advanced Vehicle Technologies and Integration, Changchun, China, July, 2012.
[10] WENZEL T A, BURNHAM K J, BLUNDELL M V, et al. Dual Extended Kalman Filter for Vehicle State and Parameter Estimation[J]. Vehicle System Dynamics, 2006,44(2):153-171.
[11] Greg Welch, Gary Bishop. An Introduction to the Kalman Filter[R].University of North Carolina, Department of Computer Science,TR 95-041.
Velocity and Road Friction Coefficient Fusion Estimation of Distributed Electric Drive Vehicle
Gao Bolin1,2,3, Chen Hui3, Xie Shugang2& Gong Jinfeng2
1.SchoolofMechanicalEngineering,TianjinUniversity,Tianjin300072; 2.ChinaAutomotiveTechnology&ResearchCenter,Tianjin300300; 3.SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804
Based on the vehicle longitudinal speed fusion estimator, combined with the advantage of distributed drive electric vehicle, and by adopting various estimation methods, a fusion estimator for road peak friction coefficient is established and a real vehicle verification test is conducted. The results show that the dual Kalman filtering technique-based fusion estimation system for vehicle speed and road peak friction coefficient established extends the applicable condition range of road peak friction coefficient and ensures the accuracy of vehicle longitudinal speed estimation.
distributed drive electric vehicle; dual Kalman filtering; vehicle speed estimation; road peak friction coefficient; fusion estimation
*國家973計(jì)劃項(xiàng)目(2011CB711200)資助。
原稿收到日期為2014年8月12日,修改稿收到日期為2014年9月25日。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
