MMU推進(jìn)器布置的冗余設(shè)計(jì)和分配算法
2016-04-13 08:32:59尚逸帆康志宇張慶展楊東春
中國(guó)空間科學(xué)技術(shù) 2016年3期
尚逸帆,康志宇,*,張慶展,楊東春
1.上海宇航系統(tǒng)工程研究所,上海 201109 2.上海航天技術(shù)研究院,上海 201109
MMU推進(jìn)器布置的冗余設(shè)計(jì)和分配算法
尚逸帆1,康志宇1,*,張慶展1,楊東春2
1.上海宇航系統(tǒng)工程研究所,上海 201109 2.上海航天技術(shù)研究院,上海 201109
美國(guó)和蘇聯(lián)現(xiàn)有的艙外載人機(jī)動(dòng)裝置(Manned Maneuvering Unit,MMU)推進(jìn)系統(tǒng)設(shè)計(jì)均采用兩套獨(dú)立系統(tǒng)互為備份的方式,主系統(tǒng)故障后可以啟動(dòng)備用系統(tǒng),但備用系統(tǒng)故障則無(wú)應(yīng)對(duì)方案,因此制約航天員的安全性和艙外活動(dòng)能力。文章在常規(guī)主備份推進(jìn)模式基礎(chǔ)上提出了應(yīng)急推進(jìn)模式,備份推進(jìn)器發(fā)生故障后,根據(jù)失效發(fā)動(dòng)機(jī)組相對(duì)位置關(guān)系采用不同應(yīng)急策略,剩余有效推進(jìn)器通過(guò)聯(lián)合控制的方式保證航天員六自由度控制。經(jīng)過(guò)可行性分析和仿真計(jì)算,證明了應(yīng)急模式下MMU推進(jìn)能力有一定降低,但能夠?yàn)楹教靻T返回提供動(dòng)力,應(yīng)急推進(jìn)模式具有可行性。
艙外載人機(jī)動(dòng)裝置;推進(jìn)器布局;冗余設(shè)計(jì);推進(jìn)器故障;控制分配算法
艙外載人機(jī)動(dòng)裝置(Manned Maneuvering Unit,MMU)是航天員脫離航天器進(jìn)行空間活動(dòng)的獨(dú)立裝置。航天員攜帶MMU出艙實(shí)現(xiàn)“太空行走”,可以完成艙內(nèi)難以實(shí)施的科學(xué)試驗(yàn)、為大型空間設(shè)備的建造提供人工服務(wù)、解決交會(huì)對(duì)接時(shí)出現(xiàn)的故障問(wèn)題、對(duì)空間站設(shè)備進(jìn)行檢測(cè)升級(jí)以及回收釋放小衛(wèi)星等[1],因此MMU輔助航天員出艙活動(dòng)是進(jìn)一步提升人類空間探索能力的一種方案。
美國(guó)和蘇聯(lián)都對(duì)MMU進(jìn)行了研究和試制,先后形成了MMU和艙外救援裝置(Simplified Aid for Extravehicular Activity Rescue,SAFER)兩類載人機(jī)動(dòng)裝置。美國(guó)MMU在立方體的8個(gè)頂點(diǎn)安裝了24個(gè)推進(jìn)器,每個(gè)頂點(diǎn)的3個(gè)推進(jìn)器為一組,每個(gè)推進(jìn)器的推力均為7.56 N,24個(gè)推進(jìn)器分為主備份兩組,在發(fā)生故障時(shí)可實(shí)現(xiàn)主備份推進(jìn)系統(tǒng)的切換。蘇聯(lián)艙外機(jī)動(dòng)裝置總質(zhì)量為218 kg,兩套推進(jìn)系統(tǒng)安裝在相同位置,每套系統(tǒng)在前后面各安裝4個(gè)發(fā)動(dòng)機(jī),上、下、左、右面各安裝2個(gè)發(fā)動(dòng)機(jī),共采用32個(gè)推力為5 N的氮?dú)馔七M(jìn)器,速度增量達(dá)30 m/s[2]。美國(guó)的SAFER主要作用是提供救援,其質(zhì)量、推力和速度增量都較小,推進(jìn)器布局方式和美國(guó)MMU相同。俄羅斯的SAFER同樣以艙外救生為目的,推進(jìn)系統(tǒng)采用了16個(gè)推力為3.5~4 N的推進(jìn)器。為了方便攜帶,俄制SAFER采用了模塊化設(shè)計(jì),氣瓶等模塊可整體更換[2-3]。
目前,已有的各型MMU都通過(guò)配置兩套獨(dú)立的冷氣推進(jìn)系統(tǒng),并相互備份的方式提高可靠性。主推進(jìn)系統(tǒng)故障情況下啟用備用推進(jìn)系統(tǒng),在現(xiàn)有公開(kāi)發(fā)表的文獻(xiàn)資料中尚未見(jiàn)到針對(duì)MMU備用推進(jìn)器發(fā)生故障的應(yīng)對(duì)策略研究。文獻(xiàn)[4-8]對(duì)衛(wèi)星姿態(tài)控制中常用的推進(jìn)器布局進(jìn)行分析,總結(jié)了推進(jìn)器布局設(shè)計(jì)的一般準(zhǔn)則以及分析方法。文獻(xiàn)[9-11]考慮了推進(jìn)器故障對(duì)推進(jìn)性能的影響以及應(yīng)對(duì)策略。但上述方式針對(duì)無(wú)人航天器推進(jìn)系統(tǒng)的設(shè)計(jì)方法不能完全適用于MMU,航天員操縱下的MMU推進(jìn)器布局和推力指令分配方式有其特殊性,在借鑒衛(wèi)星推進(jìn)器構(gòu)型和分配算法基礎(chǔ)上,還要考慮航天員的肢體遮擋和操縱方式[12-13]。
為提高M(jìn)MU工作的安全性,本文在常規(guī)主備份系統(tǒng)基礎(chǔ)上進(jìn)一步提出應(yīng)急工作模式。通過(guò)在推進(jìn)系統(tǒng)支路中增加自鎖閥門(mén),將原有單個(gè)推進(jìn)器失效后關(guān)閉整套系統(tǒng)的方式改為關(guān)閉失效推進(jìn)器所在組發(fā)動(dòng)機(jī)。主備份系統(tǒng)均出現(xiàn)故障,對(duì)剩余有效推進(jìn)器采用聯(lián)合控制的方式保證MMU六自由度飛行能力,并通過(guò)仿真驗(yàn)證了方案的可行性。
1 推進(jìn)系統(tǒng)描述
1.1 推進(jìn)器整體構(gòu)型
建立航天員MMU本體坐標(biāo)系OXYZ,MMU航天員共同質(zhì)心為O,以MMU正方向?yàn)閄,頭部到腳的延伸方向?yàn)閆,Y符合右手坐標(biāo)系準(zhǔn)則。
MMU的工作狀態(tài)分為手動(dòng)控制和自動(dòng)控制兩種模式。手動(dòng)控制是主要的工作方式,如圖1所示,航天員通過(guò)操縱桿進(jìn)行六自由度控制,左手控制平移,右手控制旋轉(zhuǎn)[3]。推進(jìn)系統(tǒng)構(gòu)型主要考慮以下因素:
1)推進(jìn)系統(tǒng)具備姿軌一體控制能力[12,14]。
2)推進(jìn)器布置要避開(kāi)航天員頭部和四肢的主要活動(dòng)區(qū)域。
3)推進(jìn)系統(tǒng)具有能夠執(zhí)行全部功能的兩套相互獨(dú)立的系統(tǒng)。
綜合考慮上述約束條件,MMU采用主備份兩套推進(jìn)系統(tǒng),共24個(gè)推進(jìn)器。推進(jìn)器安裝在立方體構(gòu)型的8個(gè)頂點(diǎn),并關(guān)于MMU質(zhì)心對(duì)稱分布。每個(gè)頂點(diǎn)的3個(gè)推進(jìn)器分為一組,推進(jìn)方向相互正交配置。

圖1 MMU總體構(gòu)型Fig.1 Configuration of the MMU
兩套推進(jìn)系統(tǒng)分別用“A”和“B”表示,推進(jìn)器的編號(hào)為α-βχ,其中α代表推進(jìn)器所屬的系統(tǒng),即A或B;β表示推進(jìn)器控制的推進(jìn)方向:F為向前、B為向后、U為向上、D為向下、L為向左、R為向右;χ表示推進(jìn)器編號(hào),分別為1、2、3和4。
平移控制指令要求工作推進(jìn)器合力通過(guò)MMU質(zhì)心,每套系統(tǒng)的推進(jìn)器在推力面都布置在對(duì)角線位置,得到推進(jìn)器布局方式如圖2所示。圖中:Lx、Ly和Lz分別為力臂在X、Y、Z軸的分量,A1~A4和B1~B4為推進(jìn)器所在的8個(gè)頂點(diǎn)。
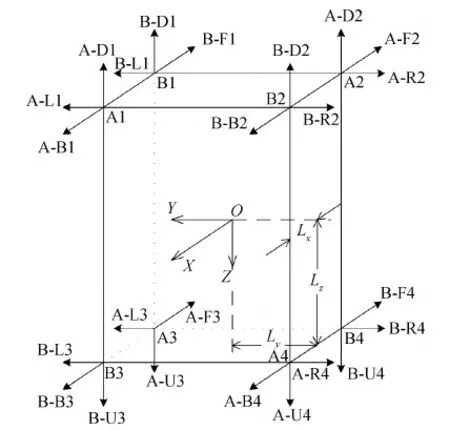
圖2 推進(jìn)器布局示意Fig.2 Illustration of the configuration of the thrusters
1.2 推力分配算法

(1)

(2)

(3)

(4)

1.3 常規(guī)推進(jìn)模式
常規(guī)模式下A/B兩套系統(tǒng)相互獨(dú)立,互為備份。設(shè)A為主推進(jìn)系統(tǒng),則B作為備份系統(tǒng)。推進(jìn)系統(tǒng)正常情況下,A系統(tǒng)獨(dú)立工作;A系統(tǒng)推進(jìn)器出現(xiàn)故障,切換到B系統(tǒng)進(jìn)行工作。下面以24推進(jìn)器布局為基礎(chǔ),結(jié)合推進(jìn)器的坐標(biāo)和推進(jìn)矢量方向,代入式(4),得到
(5)
求解推進(jìn)器開(kāi)關(guān)方式,φ表示非零元素。當(dāng)M為零向量、F為非零向量時(shí),航天員控制MMU平移,排除實(shí)際應(yīng)用中推進(jìn)器相互對(duì)消的情況,可得該推進(jìn)器布局下的惟一一組解,即某一軸向的平移只有一種推力組合方式;當(dāng)F為零向量、M為非零向量時(shí),航天員發(fā)出控制MMU姿態(tài)控制指令,有兩組符合要求的解,其冗余度高于平移推進(jìn)。
根據(jù)計(jì)算結(jié)果給出具體推進(jìn)組合方式指令,如表1所示。每套推力系統(tǒng)中,單個(gè)方向的平移控制只有一種推進(jìn)器組合方式,姿態(tài)控制有兩種組合方式。推進(jìn)系統(tǒng)結(jié)構(gòu)如圖3所示,當(dāng)任意推進(jìn)器故障,通過(guò)關(guān)閉故障推進(jìn)器所在干路的自鎖閥[16],使其所在組的3個(gè)推進(jìn)器關(guān)閉。同時(shí),對(duì)應(yīng)的3個(gè)平移推進(jìn)方向失效,剩余的3個(gè)平移推進(jìn)方向不受影響。
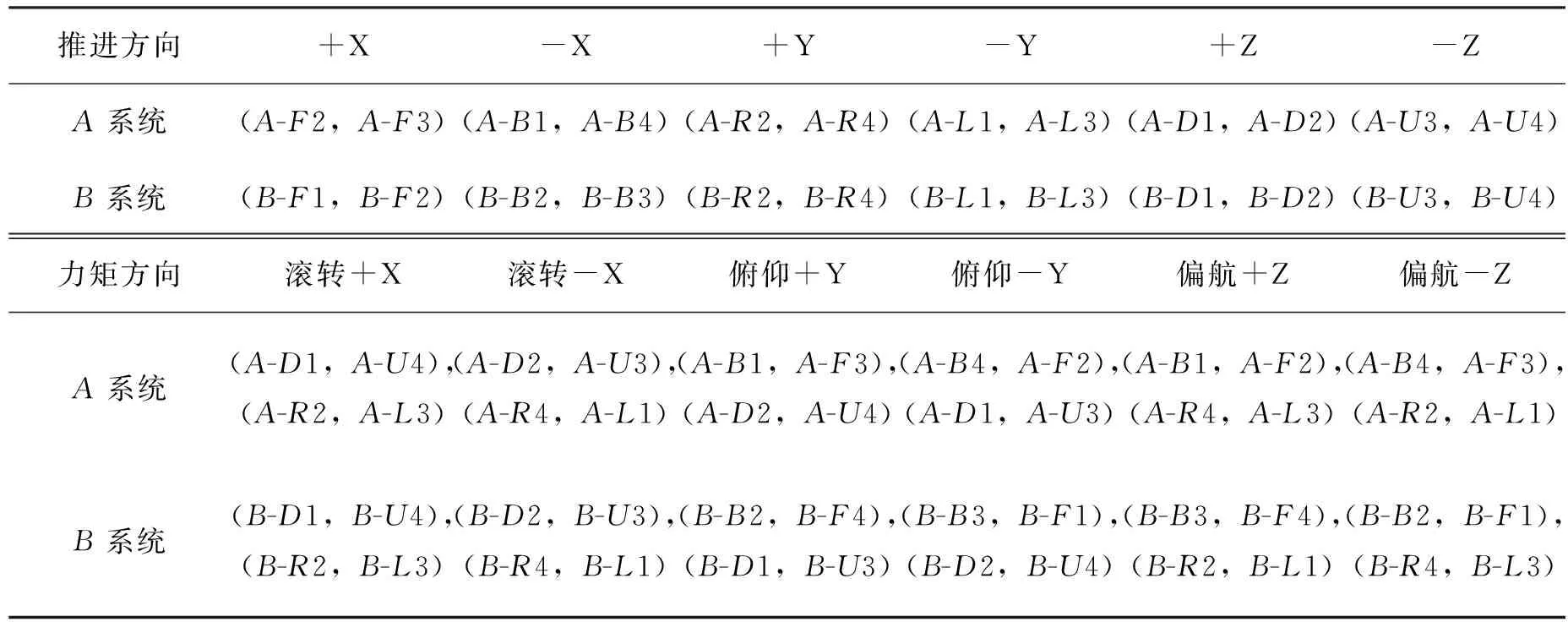
表1 推進(jìn)系統(tǒng)常規(guī)模式控制指令
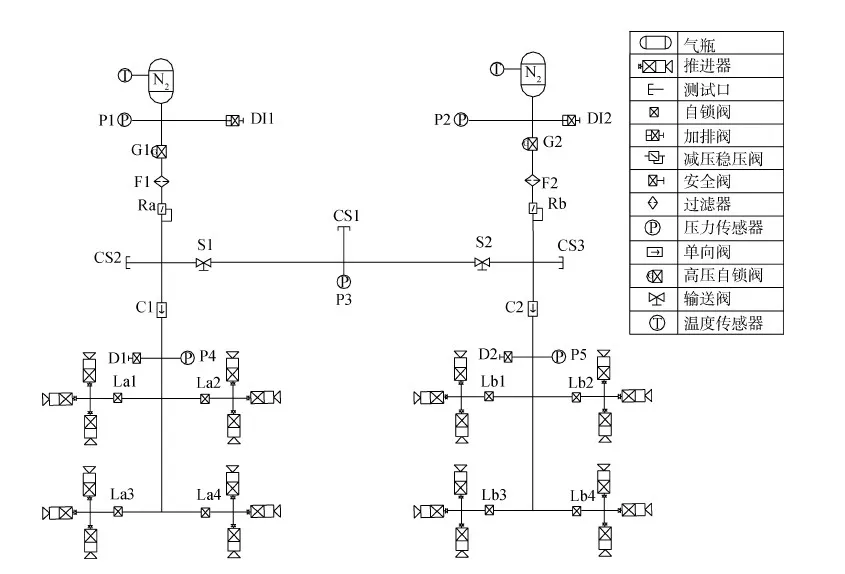
圖3 推進(jìn)系統(tǒng)結(jié)構(gòu)Fig.3 Constitution of the propulsion system
2 應(yīng)急推進(jìn)模式
對(duì)MMU推進(jìn)系統(tǒng)的設(shè)計(jì)遵循兩次故障,航天員可以安全返回的原則。推進(jìn)系統(tǒng)在常規(guī)工作條件下,A系統(tǒng)工作。當(dāng)A系統(tǒng)故障后,B系統(tǒng)啟動(dòng),保證航天員艙外正常活動(dòng)。當(dāng)B系統(tǒng)推進(jìn)器失效后,啟動(dòng)應(yīng)急工作模式,保證MMU六自由度飛行,使航天員返航。MMU推進(jìn)器構(gòu)型特點(diǎn)決定其姿態(tài)控制冗余度高于平移控制,下面針對(duì)平移的推進(jìn)控制展開(kāi)分析。

2.1 應(yīng)急推進(jìn)模式1
當(dāng)ΨA∪ΨB=Ψa,表示A/B剩余有效推進(jìn)器的并集為全集,ΨA和ΨB分別包含3個(gè)推進(jìn)方向,全集為6個(gè)推進(jìn)方向,失效推進(jìn)方向的交集為空集。在推進(jìn)器的幾何構(gòu)型中的表現(xiàn)為兩失效推進(jìn)器組所在點(diǎn)不在長(zhǎng)方體的同一平面內(nèi),即兩推進(jìn)器組位于六面體對(duì)頂點(diǎn)處,如圖4所示。
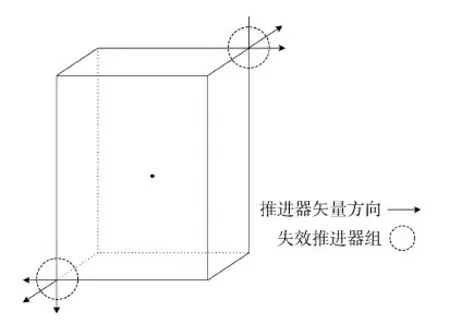
圖4 應(yīng)急模式1對(duì)應(yīng)失效推進(jìn)器位置關(guān)系Fig.4 Relations between failure thrusters configurationsof emergency propulsion mode 1
A/B系統(tǒng)各關(guān)閉一組發(fā)動(dòng)機(jī),推進(jìn)系統(tǒng)通過(guò)組合的方式能夠?qū)崿F(xiàn)全向平移控制,此為應(yīng)急模式1。
2.2 應(yīng)急推進(jìn)模式2
當(dāng)ΨA∪ΨB≠Ψa,A/B剩余有效發(fā)動(dòng)機(jī)通過(guò)簡(jiǎn)單的組合方式不能實(shí)現(xiàn)全向平移控制,需要兩套系統(tǒng)推進(jìn)器聯(lián)合工作。ΨA和ΨB的余集的交集不為空集,依據(jù)推進(jìn)器構(gòu)型關(guān)系,失效推進(jìn)器組位于長(zhǎng)方體的同一條棱邊,如圖5所示。
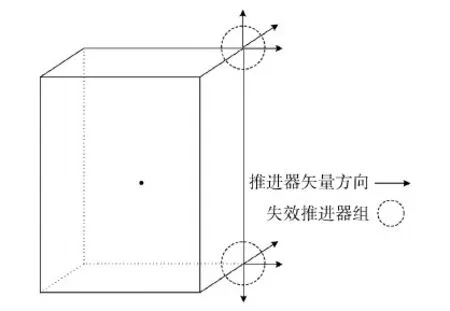
圖5 應(yīng)急模式2對(duì)應(yīng)失效推進(jìn)器位置關(guān)系Fig.5 Relations between failure thrusters configurationsof emergency propulsion mode 2
在故障面,A/B系統(tǒng)都無(wú)法獨(dú)立產(chǎn)生該方向推力,需要采取應(yīng)急模式2。
由圖4和圖5可得,MMU采用的應(yīng)急推進(jìn)模式由失效推進(jìn)器組在長(zhǎng)方體構(gòu)型下的幾何關(guān)系決定。失效推進(jìn)器組處在長(zhǎng)方體對(duì)頂點(diǎn)位置時(shí)采用應(yīng)急模式1,失效推進(jìn)器在長(zhǎng)方體同一棱邊時(shí)采用應(yīng)急模式2,應(yīng)急模式分類如表2所示。
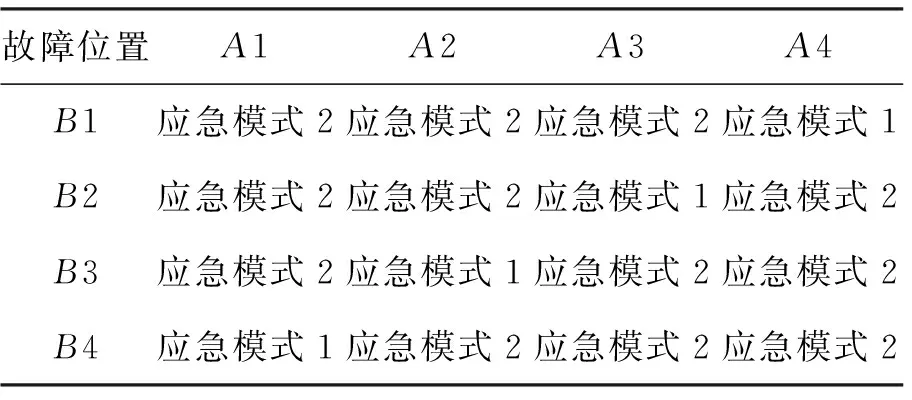
表2 應(yīng)急模式選擇分類表
在應(yīng)急模式2下,A/B系統(tǒng)故障推進(jìn)器所在的面推力缺失,利用故障方向的剩余推進(jìn)器同時(shí)工作,產(chǎn)生失效推進(jìn)方向的推力。同時(shí),發(fā)動(dòng)機(jī)偏心推進(jìn)產(chǎn)生附加力矩,利用故障面?zhèn)认虬l(fā)動(dòng)機(jī)輔助工作,抵消推進(jìn)過(guò)程產(chǎn)生的力矩,工作方式如圖6所示。
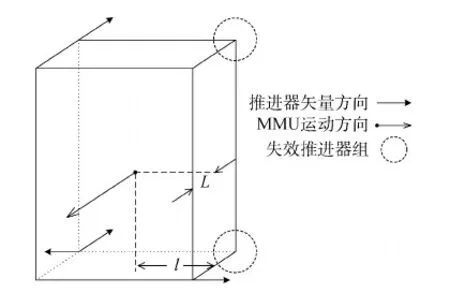
圖6 A/B系統(tǒng)聯(lián)合控制示意Fig.6 Control allocation of the combination ofthe propulsion systems A and B
圖6中:L表示故障面推力所對(duì)應(yīng)的力臂,l表示側(cè)向輔助推力對(duì)應(yīng)的力臂。24個(gè)推進(jìn)器中關(guān)閉2組,剩余有效推進(jìn)器為18個(gè),則n=18。
(6)
將A/B剩余的18個(gè)推進(jìn)器帶入式(6),求解對(duì)應(yīng)推進(jìn)器的推力。
3 可行性分析
MMU采用對(duì)稱的推進(jìn)器布局方式,每個(gè)發(fā)動(dòng)機(jī)與整體構(gòu)型的關(guān)系都相同,決定應(yīng)急模式的是故障發(fā)動(dòng)機(jī)組的相對(duì)位置關(guān)系,因此選取特定故障推進(jìn)器來(lái)分析應(yīng)急模式是否可行具有代表性。
3.1 應(yīng)急模式1可行性分析

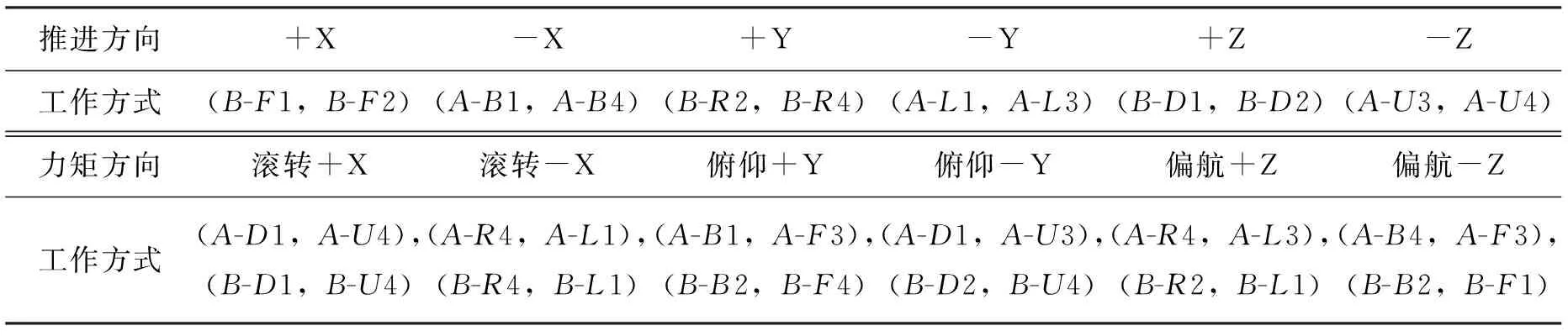
表3 a2、b3組推進(jìn)器失效條件下推進(jìn)控制指令
A/B剩余發(fā)動(dòng)機(jī)分別完成各自對(duì)應(yīng)的推進(jìn)指令,不需要同時(shí)配合完成某一指令的操作。應(yīng)急模式1在推力大小、燃料消耗量和控制精度都與常規(guī)模式相同。
3.2 應(yīng)急模式2可行性分析

(7)
(8)
將式(8)帶入式(7)中,得+X方向推力解:
(9)
(10)
控制推進(jìn)+Y方向的兩組解為
(11)
(12)
設(shè)推進(jìn)器額定推力umax=5,φ+x和φ+y為+X和+Y方向推力,將Lx=0.112 5 m、Ly=0.335m和Lz=0.565m帶入式(9)~式(12),求得0≤φ+x≤3.36、0≤φ+y≤10,應(yīng)急模式2的控制指令如表4所示。
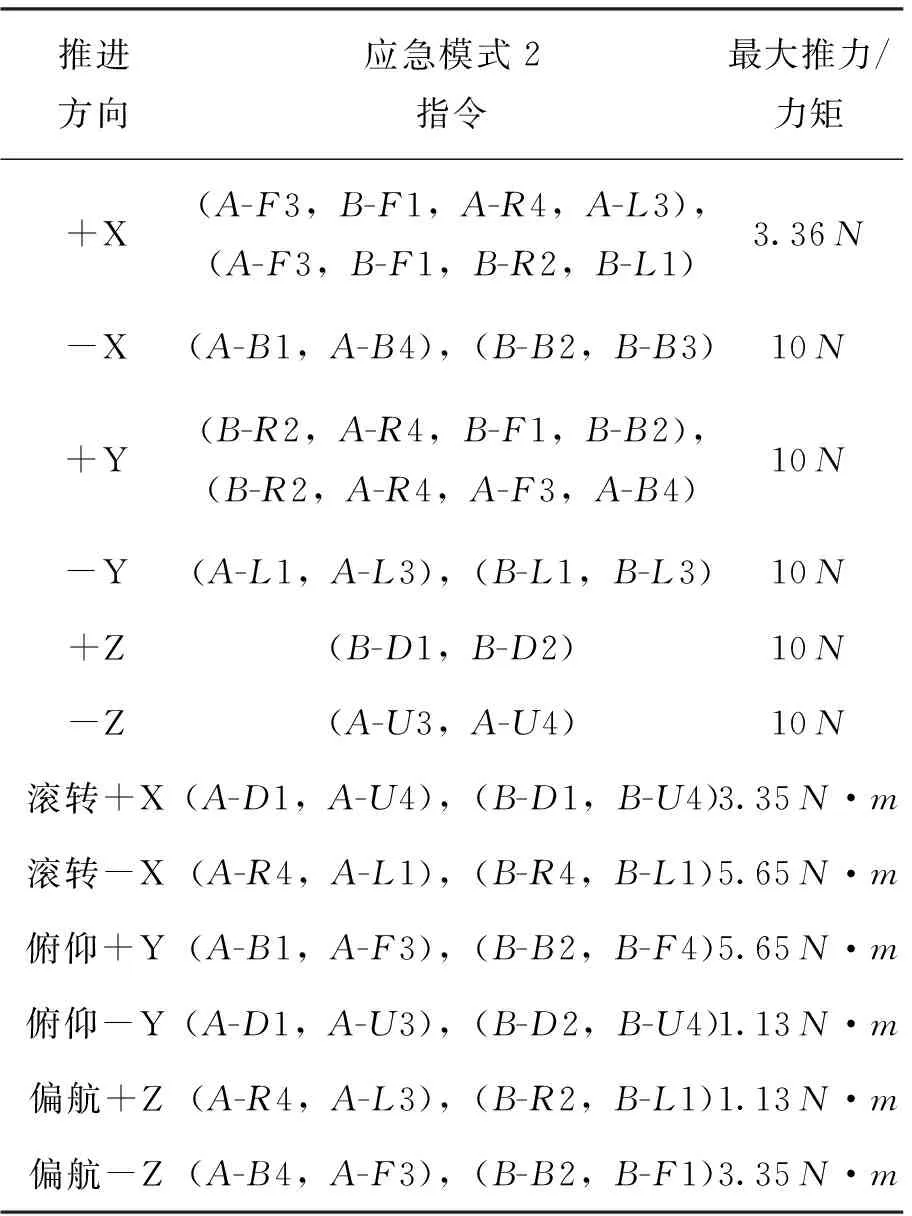
表4 a2、b4組推進(jìn)器失效條件下的推進(jìn)控制指令
4 仿真分析
4.1 仿真條件
假設(shè)空間站軌道半長(zhǎng)軸為6 721.1km,偏心率為0.001,軌道傾角為42°,升交點(diǎn)赤經(jīng)為0°,航天員在空間站運(yùn)動(dòng)方向前100m。常規(guī)模式和應(yīng)急模式1在推力、繞飛速度增量完全相同,只有工作的發(fā)動(dòng)機(jī)不同;分別對(duì)航天員在常規(guī)模式和應(yīng)急模式2條件下對(duì)繞飛過(guò)程的燃料消耗、推力損失進(jìn)行分析對(duì)比。
常規(guī)模式中推進(jìn)系統(tǒng)A獨(dú)立工作,應(yīng)急模式1中a2組發(fā)動(dòng)機(jī)和b4組發(fā)動(dòng)機(jī)故障,應(yīng)急模式2中a2組發(fā)動(dòng)機(jī)和b4組發(fā)動(dòng)機(jī)故障,軌道機(jī)動(dòng)前航天員姿態(tài)與期望姿態(tài)重合。航天員與MMU總質(zhì)量為300kg,仿真內(nèi)容為MMU由初始位置進(jìn)入繞飛軌道并繞飛空間站一周,設(shè)定繞飛半徑為60m,繞飛周期為10min,對(duì)比MMU在不同模式下繞飛消耗的時(shí)間和速度增量。
4.2 仿真結(jié)果
MMU在常規(guī)模式/應(yīng)急模式1條件下的繞飛曲線和推力曲線如圖7(a)和圖8所示,圖8中:縱坐標(biāo)小括號(hào)內(nèi)表示在應(yīng)急模式1條件下進(jìn)行工作的推進(jìn)器。應(yīng)急模式2條件下的繞飛曲線和推力曲線如圖7(b)和圖9所示。
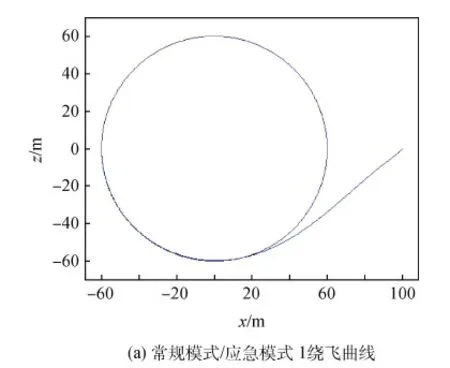
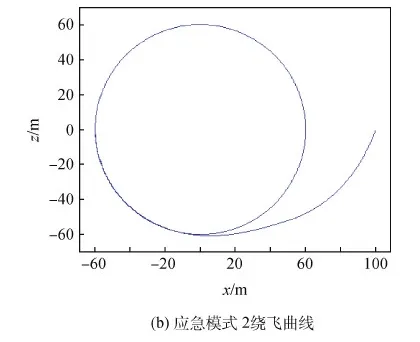
圖7 常規(guī)模式/應(yīng)急模式1繞飛曲線與應(yīng)急模式2繞飛曲線Fig.7 Route of the conventional mode/emergency mode 1 and mode 2
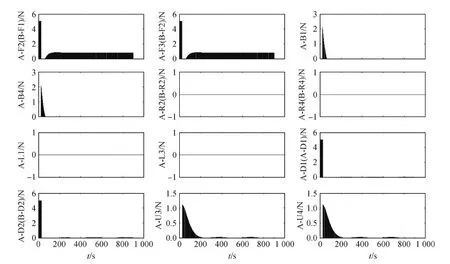
圖8 常規(guī)模式/應(yīng)急模式1發(fā)動(dòng)機(jī)推力Fig.8 Force of the thrusters in conventional mode and emergency mode 1
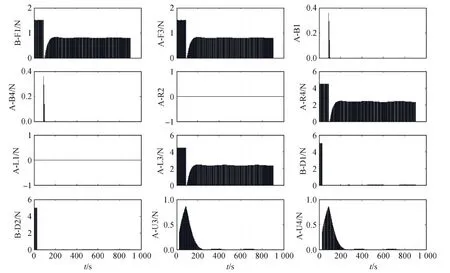
圖9 應(yīng)急模式2發(fā)動(dòng)機(jī)推力Fig.9 Force of the thrusters in emergency mode 2
通過(guò)計(jì)算可以得到MMU進(jìn)入繞飛軌道并繞飛一周的速度增量為6.787m/s,進(jìn)入繞飛軌道的時(shí)間為190.2s;應(yīng)急模式2所需的速度增量為21.562 7m/s,進(jìn)入繞飛軌道的時(shí)間為226.4s。由于應(yīng)急模式2中A/B系統(tǒng)聯(lián)合工作,在+X和+Y方向的最大推力減小,進(jìn)入繞飛軌道時(shí)間增加。
由表5的結(jié)果對(duì)比可以得到,應(yīng)急模式2在故障面推進(jìn)能力下降,主要表現(xiàn)為最大推力降低和燃料消耗量增加。從式(9)可以得到,應(yīng)急模式2在+X方向上推力消耗的燃料是常規(guī)模式的Ly/Lx=2.98倍。仿真包括過(guò)渡軌道和繞飛軌道兩部分。繞飛過(guò)程中,向心力主要由+X方向的推進(jìn)器提供,應(yīng)急模式2比常規(guī)模式消耗燃料增加約298%;在進(jìn)入繞飛的過(guò)渡軌道中,除了+X方向,-X和±Z方向的推進(jìn)器也提供了推力,這些方向推力與常規(guī)模式相同,不額外增加燃料消耗。因此,包括過(guò)渡軌道和繞飛軌道的整個(gè)過(guò)程,應(yīng)急模式2所消耗速度增量的增加應(yīng)小于298%。通過(guò)仿真得到應(yīng)急模式2消耗速度增量增加217.7%,符合預(yù)期。
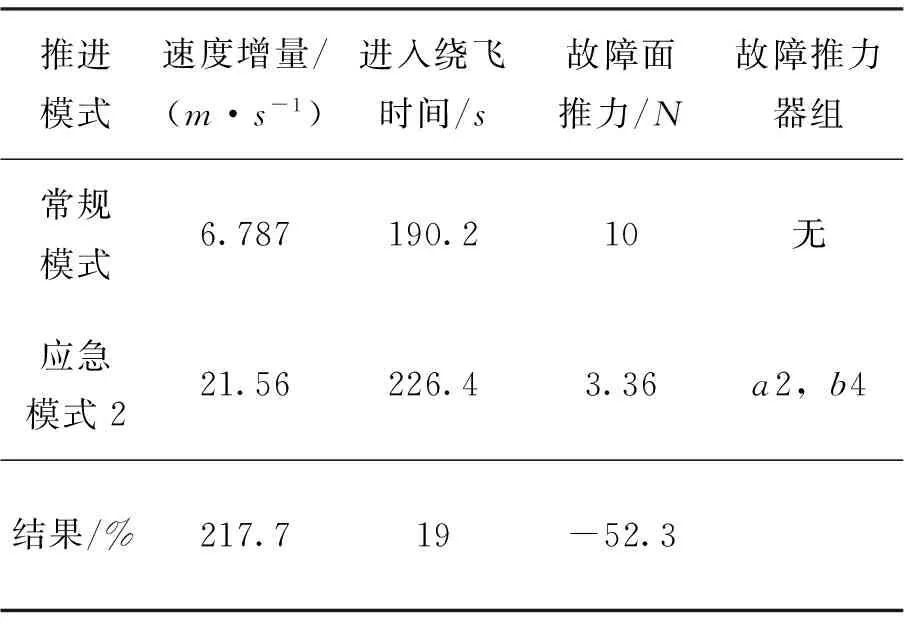
表5 常規(guī)模式與應(yīng)急模式2仿真結(jié)果對(duì)比
5 結(jié)束語(yǔ)
MMU采用了24臺(tái)推進(jìn)器正交布局方式,分為主備份兩套系統(tǒng),在兩推進(jìn)系統(tǒng)均出現(xiàn)推進(jìn)器故障的情況下應(yīng)急工作模式能夠保證MMU具有六自由度飛行的能力,增加了航天員的安全性。
應(yīng)急模式1利用A/B系統(tǒng)剩余推進(jìn)器的組合,推力大小、燃料消耗和控制精度等都與常規(guī)模式相同。仿真結(jié)果表明,應(yīng)急模式2可以完成六自由度飛行,提供航天員一定的空間機(jī)動(dòng)能力,但故障推進(jìn)方向最大推力降低,燃料消耗量增大,整體推進(jìn)性能下降,航天員需要停止工作返回空間站。
應(yīng)急模式可以覆蓋推進(jìn)系統(tǒng)任意兩個(gè)推進(jìn)器出現(xiàn)故障的情況,是常規(guī)推進(jìn)模式的補(bǔ)充。方案不改變推進(jìn)系統(tǒng)主體結(jié)構(gòu),對(duì)位于同一頂點(diǎn)處的3個(gè)推進(jìn)器干路安裝自鎖閥,結(jié)合應(yīng)急模式的控制算法增加了推進(jìn)系統(tǒng)的冗余度和可靠性。
References)
[1] 陳杰.國(guó)外宇航員艙外機(jī)動(dòng)裝置發(fā)展綜述[J]. 上海航天,2000(1):49-52.
CHEN J. Summary for development of manned maneuvering unit abroad[J]. Aerospace Shanghai, 2000(1): 49-52(in Chinese).
[2] 洪鑫, 黃衛(wèi)東. 空間艙外機(jī)動(dòng)裝置發(fā)展綜述[J]. 上海航天, 2003(1):39-44.
HONG X, HUANG W D. A review on evolution of extra vehicular activity maneuvering units[J]. Aerospace Shanghai, 2003(1): 39-44 (in Chinese).
[3] LENDA J A. Manned maneuvering unit user′s guide:NASA-CR-151864[R]. Washington,D.C.: NASA, 1978.
[4] 岳曉奎,段辰璐. 航天器推力器布設(shè)對(duì)燃料消耗的影響[J]. 中國(guó)空間科學(xué)技術(shù),2011, 31(2):43-52.
YUE X K, DUAN C L.Spacecraft thermal control technology based on variable frequency pump[J]. Chinese Space Science and Technology, 2011, 31(2):43-52(in Chinese).
[5] 夏永泉,王禹慧,楊柳瑩. 衛(wèi)星推力器布局設(shè)計(jì)方法探索[C]∥第十屆中國(guó)CAE年會(huì)論文集,2014: 135-139.
XIA Y Q, WANG S H, YANG L Y. Theresearch of thruster configuration method for GEO satellite method for studying thruster configaratio of GEO satellite[C]∥The 10th China CAE Annual Conference Proceedings,2014:135-139(in Chinese).
[6] 唐生勇, 張世杰, 張育林, 等. 姿軌一體化控制航天器推力器構(gòu)型設(shè)計(jì)[J]. 航天控制, 2010, 28(3): 20-28.
TANG S Y, ZHANG S J, ZHANG Y L, et al. Redundant thruster configuration design for the integrated orbit and attitude control of spacecraft[J]. Aerospace Control, 2010, 28(3): 20-28 (in Chinese).
[7] 岳曉奎, 段辰璐. 推力器布設(shè)對(duì)控制誤差的影響分析[J]. 宇航學(xué)報(bào), 2011,32(7):1522-1526.
YUE X K, DUAN C L. Analysis of effect of thruster configuration on control error[J]. Journal of Astronautics, 2011, 32(7): 1522-1526 (in Chinese).
[8] 顧朋, 王大軼, 劉成瑞. 衛(wèi)星姿態(tài)控制推力器布局分析[J]. 空間控制技術(shù)與應(yīng)用, 2013,39(6):23-28.
GU P, WANG D Y, LIU C R. Analysis on thrusters configuration of satellite attitude control[J]. Aerospace Control and Application, 2013, 39(6): 23-28(in Chinese).
[9] 王敏, 解永春. 考慮推力器推力上界及故障情況的航天器實(shí)時(shí)指令分配最優(yōu)查表法[J]. 宇航學(xué)報(bào), 2010,31(6):1540-1546.
WANG M, XIE Y C. Spacecraft thrusters real time command allocation algorithm in consideration of thrust upper bounds and thruster failures[J]. Journal of Astronautics, 2010,31(6):1540-1546(in Chinese).
[10] LEE A Y, WANG E K, WEITL R M, et al. Fault protection design and testing for the Cassini spacecraft in a “mixed” thruster configuration[C]∥ AIAA Guidance, Navigation, and Control (GNC) Conference, 2013:1-10.
[11] MEGA H, GAR D. Modeling common cause failures of thrusters on ISS visiting vehicles: JSC-CN-30993[R]. Honolulu, Hawaii: PSAM, 2014.
[12] JONATHAN D. Constellation program human-system integration requirements:CxP 70024[R]. Washington,D.C.: NASA, 2012.
[13] GRIFFIN B N, DISCHINGER C. Low cost space
demonstration for a single-person spacecraft[C]∥41st International Conference on Environmental Systems, 2011.
[14] ZHANG F,DUAN G R. Integrated translational and rotational finite-time maneuver of a rigid spacecraft with actuator misalignment[C]∥The Institution of Engineering and Technology 2012,2012:1192-1204.
[15] WILLIAMS T, BAUGHMEN D. Self-rescue strategies for crewmembers equipped with safer backpack[R]. Washington,D.C.: NASA, 1994.
[16] 何永英. 衛(wèi)星單元肼推進(jìn)系統(tǒng)安全性設(shè)計(jì)與實(shí)現(xiàn)[J]. 火箭推進(jìn), 2012,38(5):19-23.
HE Y Y. Safety design and realization of hydrazine monopropellant propulsion system for satellites[J]. Journal of Rocket Proplusion, 2012,38(5):19-23 (in Chinese).
(編輯:高珍、范真真)
Redundant thruster configuration design and command allocation algorithm of manned maneuvering unit
SHANG Yifan1,KANG Zhiyu1,*, ZHANG Qingzhan1, YANG Dongchun2
1.AerospaceSystemEngineeringShanghai,Shanghai201109,China2.ShanghaiAcademyofSpaceflightTechnology,Shanghai201109,China
Manned maneuvering units made by American and the Soviet Union both use two sets of independent propulsion systems, which are backup for each other. The backup propulsion system can take the place of the failure propulsion system, but there are no further safeguards for the backup system.The traditional scheme restricts the safety and extravehicular ability. Based on the conventional propulsion mode an emergency propulsion mode was proposed. Different strategies were carried out according to the positional relationship of the failured thrusters.The remaining effective thrusters to ensure the 6-DOF control were combined. Calculation and simulation results indicate that,the emergency propulsion can complete the task of extravehicular activities with reduction of propulsion,and the scheme is feasible.
manned maneuvering unit;configuration of the thrusters;redundant design;thruster fault;command allocation algorithm
10.16708/j.cnki.1000-758X.2016.0033
2015-09-22;
2015-11-11;錄用日期:2016-02-24;
時(shí)間:2016-04-29 10:49:43
http:∥www.cnki.net/kcms/detail/11.1859.V.20160429.1049.004.html
上海市科學(xué)技術(shù)委員會(huì)資助項(xiàng)目(14XD1423400)
尚逸帆(1990-),男,碩士研究生,shangyifan123@163.com
*通訊作者:康志宇(1976-),男,研究員,kzyhunt@263.net,主要研究方向?yàn)楹教炱骺傮w設(shè)計(jì)、飛行動(dòng)力學(xué)與控制
尚逸帆,康志宇,張慶展,等.MMU推進(jìn)器布置的冗余設(shè)計(jì)和分配算法[J].中國(guó)空間科學(xué)技術(shù),2016,36(3):
85-94.SHANGYF,KANGZY,ZHANGQZ,etal.Redundantthrusterconfigurationdesignandcommandallocationalgorithmofmannedmaneureingunit[J].ChineseSpaceScienceandTechnology,2016,36(3):85-94(inChinese).
V448.22
A
http:∥zgkj.cast.cn
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2015年2期)2015-01-14 06:35:05
