基于CKF和R-T-S平滑的車載SINS/OD動基座對準方案*
2016-04-12 02:15:29黃湘遠湯霞清
汽車工程 2016年8期
黃湘遠,湯霞清,武 萌
(裝甲兵工程學院控制工程系,北京 100072)
2016160
基于CKF和R-T-S平滑的車載SINS/OD動基座對準方案*
黃湘遠,湯霞清,武 萌
(裝甲兵工程學院控制工程系,北京 100072)
為提高車載捷聯慣導/里程計組合系統的動基座對準精度、速度和位置導航精度,提出了“容積卡爾曼濾波(CKF)非線性對準+非線性R-T-S平滑+再次Kalman濾波線性對準”的方案,即首先應用CKF進行非線性對準,對準結果方位對準精度一般、位置誤差較大;接著利用R-T-S平滑獲得初始時刻高精度對準結果,此時非線性誤差模型退化為線性模型;最后再進行Kalman濾波線性對準而獲得高精度方位對準精度和位置導航。該方案無需長時間的粗對準,最終能獲得高精度的結果。實車試驗驗證了該方案的有效性。
捷聯慣導/里程計組合系統;容積卡爾曼濾波;非線性R-T-S平滑;卡爾曼濾波
前言
基于捷聯慣導(strapdown inertial navigation system, SINS)/里程計(odometer, OD)的組合導航系統已廣泛應用于陸用導航[1-2]。系統正常工作之前必須進行初始對準,對準分為粗對準和精對準兩個過程。
由于里程計不能提供絕對的速度信息和位置信息,導致動基座對準中無法進行高精度定位,對準結束后載體位置誤差可能較大。文獻[3]中提出一種慣性系對準方案,忽略對準過程中的位置變化,長時間后位置誤差較大。文獻[4]和文獻[5]中以慣性系對準方案完成粗對準,基于小角度誤差模型利用線性濾波完成精對準,獲得較高精度。上述文獻認為60s內能夠獲得小失準角對準結果,均沒有考慮粗對準過程中的位置誤差。在履帶式裝甲車輛這一特殊載體中,經過多次實驗表明,運動過程中至少需5min左右才能獲得小失準角結果,此時該方案帶來較大的位置誤差。CKF是一種優秀的非線性濾波器[6-7],在多個領域獲得了大量的應用。本文中推導了采用大失準角SINS/OD非線性誤差模型,利用CKF進行非線性對準,對準結束后方位精度較高,位置精度一般,但高于慣性系對準方案的位置精度。
為了保證對準結束后位置精度,文獻[8]中設計了逆向導航算法,進行再次導航;為了加快對準速度,文獻[9]中引入了循環解算思路,文獻[10]中提出了嚴格逆向過程的羅經回溯對準方法;文獻[11]中提出基于狀態估計的卡爾曼濾波逆向導航算法。逆向思路的導航處理或狀態估計可解決對準速度和位置導航的問題。非線性對準的逆向處理可通過非線性R-T-S平滑來實現[12-13],無需進行逆向導航解算。
本文中利用CKF進行非線性對準,對準結束時利用非線性R-T-S平滑迭代至初始時刻,得到載體初始姿態。利用存儲數據再次進行導航解算,利用Kalman濾波進行線性對準至結束時刻。最后進行了實車實驗,結果表明經過再次對準之后,方位精度和位置精度都得到了較大的提高,該方案同時實現了高精度對準和位置導航。
1 SINS/OD非線性對準模型
1.1 SINS非線性誤差
記地心慣性坐標系為i系;地球系為e系;導航系n系為東北天(o-ENU)坐標系;計算平臺系為p系;載體系為b系;里程計坐標系m系為右前上坐標系。

φ=[φE,φN,φU]T
n系下載體速度vn=[vE,vN,vU]T
速度誤差δvn=[δvE,δvN,δvU]T
載體緯度L、經度λ和高度h的位置誤差為
δp=[δL,δλ,δh]T
大失準角下,基于歐拉角誤差的非線性姿態、速度和位置誤差的微分方程[14]為
(1)

該模型要求緯度誤差δL為小量。非線性對準過程中,為了保證δL為小量,可通過位置、速度間歇性閉環反饋來抑制速度和位置誤差的快速發散。
1.2 OD誤差


(2)

(3)
式中ωD為里程計隨機量測噪聲。
當失準角φ=[φE,φN,φU]T為大角度時,里程計速度在計算平臺系p系的實際輸出為
(4)
1.3 SINS/OD動基座非線性對準系統
對準過程中,需對陀螺、加速度計和里程計誤差進行估計和補償。由于對準時間較短,可將陀螺零偏εb、加速度計零偏b和里程計誤差ξD視作隨機常值,即
(5)
非線性對準系統的狀態由姿態誤差φ、速度誤差δvn、位置誤差δp、陀螺零漂εb、加速度計零偏b和里程計誤差ξD構成,即

(6)

(7)
由式(1)、式(5)和式(7)構成SINS/OD的非線性對準系統:
(8)
式中:f(x)和h(x)為非線性函數;w為系統噪聲;v為測量噪聲。w和v互相獨立,且w~N(w;0,Q),v~N(v;0,R),Q和R為噪聲方差矩陣。
當姿態誤差φ為小角度時,非線性系統退化為線性系統,可以用Kalman濾波完成對準。
2 CKF及R-T-S平滑
2.1 CKF算法

為了提高CKF的濾波精度,文獻[7]中提出了5階CKF,濾波精度達到5階。為了避免濾波過程中由于協方差矩陣Pk失去正定性導致濾波精度下降,提高算法的數值穩定性,使用協方差矩陣奇異值分解(SVD)代替Cholesky分解,算法實現如下。
(1) 時間更新

(9)
b.初始采樣
(10)

[0,0,…,1]T}T
c.狀態傳播
(11)
(12)
(2) 量測更新
a.SVD分解Pk|k-1

(13)
b.重采樣
(14)
c.觀測傳播
η0=h(y0);ηi=h(yi);ηj=h(yj)
(15)
(16)
e.利用高斯濾波框架完成非線性濾波
(17)
2.2 基于CKF的非線性對準仿真
假設陀螺常值漂移0.02°/h,隨機漂移為0.01°/h,加速度計常值零偏為1×10-4g,隨機零偏為5×10-5g。里程計安裝失準角δαψ=0.5°,δαγ=0.5°,標定系數誤差δKD=0.02。車輛初始位置緯度L=39.84°,經度λ=116.12°。設置車輛運動過程如下:車輛靜止;北向1m/s2勻加速10s;勻速運動200s;2°/s左轉彎90°;勻速運動200s;2°/s右轉彎90°;勻速運動200s。
分別設置初始失準角1[0.1°,0.1°,0.5°]、失準角2[1°,1°,10°]和失準角3[2°,2°,30°],進行非線性對準仿真,時間700s。由于水平對準速度快,精度高,因此只分析方位對準情況。圖1給出了方位對準結果,圖2給出了對準過程中的水平位置誤差。
圖1表明失準角1和2方位對準精度較高,失準角3對準精度相對較差。圖2表明小失準角下位置誤差較小,大失準角下位置誤差較大。因為里程計測量的是m系下車輛前向速度,由m系到n系的轉換過程中耦合了姿態誤差,造成n系下速度參考信息vn誤差較大,導致對準開始時刻的位置誤差迅速增大,對準一段時間后各項誤差逐步得到估計,位置誤差逐步減小。由于SINS/OD組合系統的位置誤差是發散的,隨著時間的繼續增長,位置誤差將緩慢增大。相對于慣性系對準過程中忽略位置變化的處理方法而言,此位置誤差依然相對較小。由于多種誤差的互相耦合導致大失準角下陀螺零漂εb、加速度計零偏b和里程計誤差ξD估計精度相對較差。
大失準角對準結束時,若在此對準結果的基礎上進行SINS/OD組合導航,帶來較大的初始位置誤差,該誤差在后續組合導航中無法進行修正。應急情況或位置精度相對較低的情況下,可直接使用此對準結果,組合導航過程中一旦有位置參考信息時可進行校正。當計算速度較快或有多個處理器時,為了減小組合導航的位置誤差,可借用數據存儲和循環解算的思想,利用逆向導航或狀態平滑對導航信息進行再處理。
2.3 非線性R-T-S平滑
非線性平滑分為R-T-S平滑[15]和TF平滑[16]兩種,前者計算量較小,原理簡單,應用較為廣泛。非線性R-T-S平滑在前向非線性濾波的基礎上進行后向遞推,獲得此前任意時刻狀態估計,精度高于濾波。估計過程分為前向濾波和后向遞推兩部分。

第二部分:后向遞推,按照k=N,N-1,…,1的順序進行逆向遞推,即
(18)
經過后向遞推后,可獲得各時刻的狀態平滑估計。圖3給出了失準角3方位對準的平滑估計結果,可以看出整個平滑過程中方位失準角為小角度。
3 動基座對準實驗
3.1 對準算法設置
(1) 粗對準
非線性對準能夠完成大失準角下初始對準。為了在較短的時間里獲得較好的估計效果,需對初始方位失準角進行一定的限制。車輛起動或緩慢直線行駛的情況下,采集10s左右的數據,進行慣性系粗對準,獲得慣導初始姿態。
(2) 非線性對準
車輛開始行駛,利用CKF進行SINS/OD非線性對準,對準過程中存儲相關數據。車輛行駛一段時間后完成非線性對準。
(3) 非線性R-T-S平滑
將存儲的前向濾波數據非線性R-T-S平滑至初始時刻,進行姿態修正,獲得初始時刻的慣導姿態。
(4) 再次對準
基于存儲的慣導數據和里程計數據,進行SINS/OD線性對準至對準結束時刻。
3.2 實驗驗證
實驗室將某型光纖陀螺捷聯慣導系統安裝在某車輛上,使用車輛自身的里程計信號。光纖陀螺的零偏穩定性不超過0.02°/h,加速度計的偏值重復性小于5×10-5g。首先對SINS和OD的安裝偏差角、里程計標定系數進行初始標定。
車輛行駛過程中使用高精度BD2導航芯片進行實時速度、位置測量。由于車輛行駛過程中無法獲得準確姿態,姿態參考值由靜基座對準后轉SINS/BD2組合導航提供。
為了驗證非線性對準的有效性,對準初始時刻在參考姿態的姿態上設置失準角φ=[2°,2°,30°],對準時間900s。共進行了5組試驗,方位對準結果及位置誤差如表1~表3所示。表中:ψ1,λ1和L1為首次非線性對準的方位角、經度和緯度;ψ2,λ2和L2為再次線性對準的結果;ψ,λ和L為參考值。
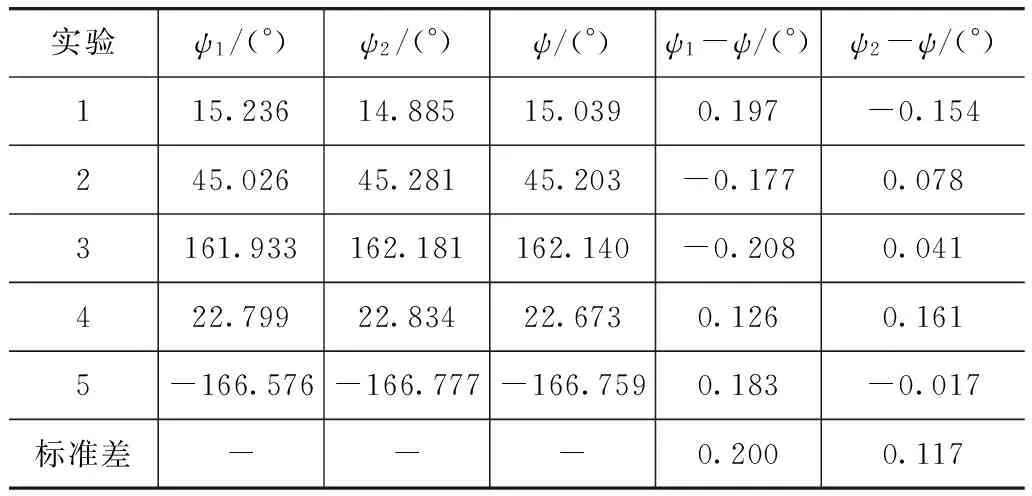
表1 方位對準結果

表2 對準結束時的經度誤差
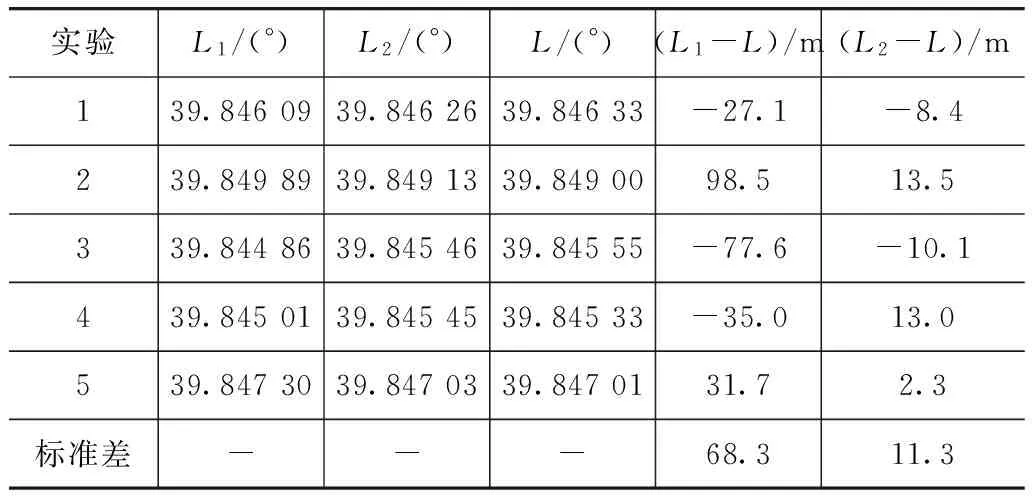
表3 對準結束時的緯度誤差
非線性對準結束后,方位精度0.200°,經度誤差121.7m,緯度誤差68.3m,方位角和位置誤差較大,其中位置誤差對后續組合導航影響更大。盡管如此,對準過程中能夠提供相當精度的位置導航,這是慣性系粗對準中較難做到的。經過R-T-S平滑和再次線性對準后,方位精度提高到0.117°,經度誤差8.5m,緯度誤差11.3m,對準精度和位置精度大幅提高。再次對準大大減小了后續SINS/OD組合導航的初始位置誤差和初始姿態誤差,從而提高組合導航的精度。
4 結論
為了同時實現SINS/OD動基座對準和位置導航,本文中設計了“非線性對準+非線性后向平滑+再次線性對準”的動基座對準方案。該方案非線性對準在對準結束時能使方位誤差為小角度,對準過程中能夠提供一定精度的位置導航,經過“平滑+再次對準”的離線操作能夠同時提高對準結束時刻的姿態和位置精度。
該對準方案為離線方案,實際應用中需使用實時方案,實時方案還需進一步研究。
[1] WU Yuanxin, WU Meiping, HU Xiaoping, et al. Self-calibration for land navigation using inertial sensors and odometer: observability analysis[C]. AIAA Conference of Guidance, Navigation and Control,2009:1-10.
[2] 朱立彬,王瑋.車輛導航系統中里程計標度因數的自標定[J].汽車工程,2013,35(5):472-476.
[3] 嚴恭敏,秦永元,衛育新,等.一種適用于SINS動基座初始對準的新算法[J].系統工程與電子技術,2009,31(3):634-637.
[4] 趙小明,趙帥,郭永剛,等.基于強跟蹤濾波的車載行進間對準[J].中國慣性技術學報,2015,23(2):141-144.
[5] 肖煊,王清哲,付夢印,等.里程計輔助陸用慣導行進間對準方法[J].中國慣性技術學報,2012,20(2):140-145.
[6] ARASARATNAM I, HAYKIN S. Cubature kalman filters[J]. IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[7] JIA B, XIN M, CHENG Y. High-degree cubature Kalman filter[J]. Automatica,2013,49:510-518.
[8] 嚴恭敏,嚴衛生,徐德民.逆向導航算法及其在捷聯羅經動基座初始對準中的應用[C].第27屆中國控制會議論文集,北京:北京航空航天大學出版社,2008:724-729.
[9] LI Wanli, WU Wenqi, WANG Jinling, et al. A novel backtracking navigation scheme for autonomous underwater vehicles[J]. Measurement,2014,47:496-504.
[10] 李京書,許江寧,何泓洋,等.嚴格逆向過程的羅經回溯對準方法[J].系統工程與電子技術,2014,36(2):348-353.
[11] GAO Wei, BEN Yueyang, ZHANG Xin, et al. Rapid fine strapdown INS alignment method under marine mooring condition[J]. IEEE Transactions on Aerospace and Electronic System,2011,47(4):2887-2896.
[12] GADSDEN S A, AL-SHABI M, ARASARATNAM I, et al. Combined cubature Kalman and smooth variable structure filtering: a robust nonlinear estimation strategy[J]. Signal Process,2014,96:290-299.
[13] JIA B, XIN M. Rauch-Tung-Striebel high-degree cubature Kalman smoother[C]. American Control Conference,2013:2472-2477.
[14] 嚴恭敏,嚴衛生,徐德民.基于歐拉平臺誤差角的SINS非線性誤差模型研究[J].西北工業大學學報,2009,27(4):511-516.
[15] WANG X X, PAN Q, LIANG Y, et al. Application of unscented transformation for nonlinear state smoothing[J]. Acta Automatica Sinica,2012,38(7):1107-1112.
[16] MA Yanhai, FANG Jiancheng, LI Jianli. Accurate estimation of lever arm in SINS/GPS integration by smoothing methods[J]. Measurement,2014,48:119-127.
Moving Base Alignment Scheme for On-board SINS/OD CombinationBased on CKF and R-T-S Smoothing
Huang Xiangyuan, Tang Xiaqing & Wu Meng
DepartmentofControlEngineering,AcademyofArmoredForceEngineering,Beijing100072
In order to improve the alignment accuracy and speed and the accuracy of position navigation of moving base in a strapdown inertial navigation system/odometer (SINS/OD) combination, a scheme of “nonlinear alignment by cubature Kalman filter (CKF) + nonlinear Rauch-Tung-Striebel (R-T-S) smoothing + linear realignment by Kalman filter” is proposed. Specifically, a nonlinear alignment is conducted by CKF first with a result of ordinary azimuth alignment accuracy and a relatively significant position error, then a nonlinear R-T-S smoothing is performed to obtain a high accuracy alignment result at initial moment with the nonlinear error model degenerated to linear model, and finally a linear realignment is carried out by Kalmann filter to obtain high accuracy azimuth alignment and position navigation. The scheme can obtain a high accuracy result without time-consuming coarse alignment, and the real vehicle test verifies the effectiveness of the scheme proposed.
strapdown inertial navigation system/odometer combination; cubature Kalman filter; nonlinear Rauch-Tung-Striebel smoothing; Kalman filter
*軍隊計劃項目資助。
原稿收到日期為2015年7月3日。