預(yù)瞄跟隨駕駛員模型校正環(huán)節(jié)參數(shù)求解方法
2016-04-12 02:14:54陳永尚張立增
汽車(chē)工程 2016年8期
管 欣,陳永尚,賈 鑫,張立增,詹 軍
(吉林大學(xué),汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春 130022)
2016148
預(yù)瞄跟隨駕駛員模型校正環(huán)節(jié)參數(shù)求解方法
管 欣,陳永尚,賈 鑫,張立增,詹 軍
(吉林大學(xué),汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春 130022)
預(yù)瞄跟隨駕駛員模型中校正環(huán)節(jié)參數(shù)準(zhǔn)確與否直接影響位置控制的精度。由于該參數(shù)與速度的關(guān)系具有強(qiáng)非線性難以直接求出,且對(duì)于多自由度復(fù)雜車(chē)輛模型,簡(jiǎn)單的等效2自由度法難免帶來(lái)位置跟隨的誤差。本文提出一種任意車(chē)速下校正環(huán)節(jié)參數(shù)的求解方法。首先求解兩個(gè)特定車(chē)速下的相關(guān)參數(shù),進(jìn)一步推導(dǎo)出校正環(huán)節(jié)參數(shù)關(guān)于速度的關(guān)系表達(dá)式。在MATLAB/Simulink中對(duì)CarSim C級(jí)車(chē)進(jìn)行雙移線和蛇行仿真試驗(yàn)。結(jié)果表明,采用以所提出的求解方法求出的參數(shù)的駕駛員模型跟隨性較好,用于人-車(chē)閉環(huán)仿真有較高的精度。
車(chē)輛;駕駛員模型;校正環(huán)節(jié);參數(shù)求解
前言
駕駛員轉(zhuǎn)向控制模型的研究根據(jù)有無(wú)預(yù)瞄環(huán)節(jié),分為補(bǔ)償校正模型和預(yù)瞄跟隨模型[1-2]。預(yù)瞄跟隨模型考慮了駕駛員的前視作用,在人-車(chē)閉環(huán)系統(tǒng)評(píng)價(jià)和智能車(chē)輛控制領(lǐng)域應(yīng)用廣泛[3-5]。該模型包含7個(gè)物理參數(shù):神經(jīng)反應(yīng)延遲時(shí)間td、動(dòng)作慣性滯后時(shí)間Th、校正環(huán)節(jié)增益系數(shù)C0、微分校正系數(shù)TC、跟隨器3階參與系數(shù)a、預(yù)瞄時(shí)間Tp和方位預(yù)瞄作用系數(shù)λ。其中td和Th屬生理學(xué)范疇,不做討論。Tp,a和λ3個(gè)參數(shù)與駕駛員特性有關(guān),作者在文獻(xiàn)[6]中用誤差分析法對(duì)其求解。模型中校正環(huán)節(jié)是對(duì)最優(yōu)側(cè)向加速度進(jìn)行校正確定一個(gè)最優(yōu)預(yù)瞄轉(zhuǎn)向盤(pán)轉(zhuǎn)角,其參數(shù)準(zhǔn)確與否直接影響車(chē)輛側(cè)向位置控制的精度。因此,本文中主要研究校正環(huán)節(jié)相關(guān)參數(shù)C0和TC的確定方法。
研究表明,C0和TC與汽車(chē)側(cè)向穩(wěn)態(tài)增益Gay和1階時(shí)間常數(shù)Ty1、T1有關(guān)[7]。對(duì)于復(fù)雜多自由度車(chē)輛模型或真實(shí)車(chē)輛,Gay、Ty1和T1很難直接計(jì)算。文獻(xiàn)[8]中給出通過(guò)轉(zhuǎn)向盤(pán)角階躍試驗(yàn)求出某一速度下汽車(chē)穩(wěn)態(tài)增益與1階時(shí)間常數(shù)的方法,但此方法只能針對(duì)某一特定速度。文獻(xiàn)[9]中從線性2自由度車(chē)輛模型中將車(chē)速分離,可以將某一車(chē)速下的傳遞函數(shù)外推到任意車(chē)速下,且在線性區(qū)內(nèi)有較高精度。但該方法要求在試驗(yàn)車(chē)速下辨識(shí)傳遞函數(shù)的全部系數(shù),工作量大且精度較低。文獻(xiàn)[10]中通過(guò)最小二乘法辨識(shí)Gay和TC,并且用三次樣條曲線擬合出其關(guān)于速度的表達(dá)式,但此方法工作量巨大,過(guò)程中出現(xiàn)誤差和錯(cuò)誤易導(dǎo)致控制效果變差。
為此,提出一種試驗(yàn)法求解任意車(chē)速預(yù)瞄跟隨駕駛員模型校正環(huán)節(jié)參數(shù),通過(guò)兩個(gè)標(biāo)定車(chē)速的轉(zhuǎn)向盤(pán)角階躍試驗(yàn)求出對(duì)應(yīng)車(chē)速下汽車(chē)側(cè)向穩(wěn)態(tài)增益與1階時(shí)間常數(shù),在此基礎(chǔ)上推導(dǎo)出任意車(chē)速下的校正環(huán)節(jié)的表達(dá)式。
1 預(yù)瞄跟隨駕駛員模型

人-車(chē)閉環(huán)系統(tǒng)的傳遞函數(shù)為
W(s)=P(s)·F(s)
(1)
(2)
(3)
式中:s為拉普拉斯算子;Tp為預(yù)瞄時(shí)間;P(s)為預(yù)瞄模塊;F(s)為跟隨模塊,包括預(yù)估環(huán)節(jié)B(s),決策環(huán)節(jié)D(s),校正環(huán)節(jié)C(s)和滯后環(huán)節(jié)h(s),以及被控車(chē)輛V(s)。
本文中主要討論校正環(huán)節(jié)C(s)參數(shù)的確定方法。對(duì)于校正環(huán)節(jié)C(s),文獻(xiàn)[7]中給出的微分形式的解析式為
C(s)=C0(1+TCs)
(4)
其中
(5)
式中:td,th為駕駛員反應(yīng)滯后時(shí)間,一般取0.2和0.1s[8]。
汽車(chē)的側(cè)向加速度對(duì)轉(zhuǎn)向盤(pán)轉(zhuǎn)角的傳遞函數(shù)可用下式描述[9]:
(6)
(7)
式中:Gay為汽車(chē)側(cè)向加速度穩(wěn)態(tài)增益;T1,T2,Ty1,Ty2等為常數(shù)。Gay,T1,Ty1為與汽車(chē)動(dòng)態(tài)響應(yīng)特性相關(guān)的參數(shù)。
2 校正環(huán)節(jié)參數(shù)求解方法
2.1 傳統(tǒng)等效2自由度求解方法
由式(5)可知校正環(huán)節(jié)受汽車(chē)的側(cè)向加速度穩(wěn)態(tài)增益Gay和側(cè)向加速度對(duì)轉(zhuǎn)向盤(pán)轉(zhuǎn)角響應(yīng)的1階時(shí)間常數(shù)T1,Ty1的影響。對(duì)于2自由度汽車(chē)模型,Gay,T1,Ty1等都可以由汽車(chē)前后輪的側(cè)偏剛度、汽車(chē)質(zhì)量、質(zhì)心到前后輪的距離與繞z軸轉(zhuǎn)動(dòng)慣量等來(lái)直接確定[11]。
(8)
式中:vx為當(dāng)前車(chē)速;isw為轉(zhuǎn)向系角傳動(dòng)比;L為整車(chē)軸距;K為穩(wěn)定性因數(shù);lf,lr分別為質(zhì)心到前軸、后軸的距離;kf,kr分別為前軸和后軸的側(cè)偏剛度;m為整車(chē)質(zhì)量。
但當(dāng)被控對(duì)象為多自由度汽車(chē)模型或者真實(shí)車(chē)輛時(shí),Gay,T1,Ty1很難直接求出,通常的方法將被控對(duì)象等效為一個(gè)2自由度車(chē)輛模型,計(jì)算出等效2自由度車(chē)輛模型的相關(guān)參數(shù)代入式(8)和式(5)中可求出C0和TC的值。
2.2 基于試驗(yàn)的參數(shù)求解方法
前面介紹了傳統(tǒng)的采用等效2自由度法求微分校正環(huán)節(jié)的參數(shù),由于汽車(chē)前后軸的側(cè)偏剛度受載荷轉(zhuǎn)移等的影響很難準(zhǔn)確求出,采用等效2自由度的方法難免會(huì)帶來(lái)位置跟隨誤差。下面介紹本文中提出的試驗(yàn)法準(zhǔn)確求解任意車(chē)速的校正環(huán)節(jié)參數(shù)的方法。
通過(guò)式(5)發(fā)現(xiàn)計(jì)算TC時(shí)只需計(jì)算T1-Ty1,無(wú)需計(jì)算出T1和Ty1的具體值。根據(jù)文獻(xiàn)[8]中由轉(zhuǎn)向盤(pán)階躍試驗(yàn)求單速度下多自由度車(chē)輛模型側(cè)向加速度穩(wěn)態(tài)增益和1階時(shí)間常數(shù)差。
(9)

根據(jù)文獻(xiàn)[11]中提出的方法整理出分離車(chē)速因素的側(cè)向動(dòng)力學(xué)傳遞函數(shù)。
(10)
其中
(11)
式中:vx為任意車(chē)速;vxt為試驗(yàn)車(chē)速;Gayt為試驗(yàn)車(chē)速下的側(cè)向加速度穩(wěn)態(tài)增益;Ty1t,Ty2t,T1t和T2t為試驗(yàn)車(chē)速下的傳遞函數(shù)各階系數(shù);isw為轉(zhuǎn)向系等效角傳動(dòng)比;s為拉普拉斯算子。
(12)
(13)
利用待定系數(shù)法,通過(guò)兩個(gè)不同車(chē)速vx1,vx2的轉(zhuǎn)向盤(pán)角階躍試驗(yàn)得到的兩個(gè)車(chē)速下Gay值,求得轉(zhuǎn)向系角傳動(dòng)比isw。
(14)
式中:Gay1,Gay2為在兩個(gè)標(biāo)定車(chē)速vx1和vx2的側(cè)向加速度穩(wěn)態(tài)增益值。
利用兩個(gè)不同車(chē)速下求得的T1-Ty1值可求得在車(chē)速vx1下的1階時(shí)間常數(shù)值。
(15)
式中:C1和C2分別為在兩個(gè)標(biāo)定車(chē)速vx1和vx2下的1階系數(shù)差T1-Ty1值。
將式(14)和式(15)代入式(12)和式(13)求得最終需要的任意車(chē)速下側(cè)向加速度穩(wěn)態(tài)增益Gay及1階系數(shù)T1,Ty1的表達(dá)式為
(16)
(17)
將式(16)和式(17)代入式(5)求得C0,TC關(guān)于速度的最終關(guān)系式為
(18)
3 仿真試驗(yàn)驗(yàn)證
選取CarSim中的C級(jí)樣車(chē),在Matlatb/Simulink環(huán)境下進(jìn)行仿真試驗(yàn)分析。
3.1 標(biāo)定速度確定
分別在20~140km/h每隔20km/h進(jìn)行60°轉(zhuǎn)向盤(pán)角階躍試驗(yàn),由式(9)得到Gay和T1-Ty1值見(jiàn)表1。分別取40與60km/h,40與120km/h,80與120km/h及60與100km/h 4組標(biāo)定車(chē)速,從表1中查得相應(yīng)的Gay和T1-Ty1值代入式(16)、式(17)得到每組車(chē)速下的計(jì)算值,與試驗(yàn)值的對(duì)比見(jiàn)圖2,不同標(biāo)定車(chē)速下相對(duì)誤差最大值見(jiàn)表2。
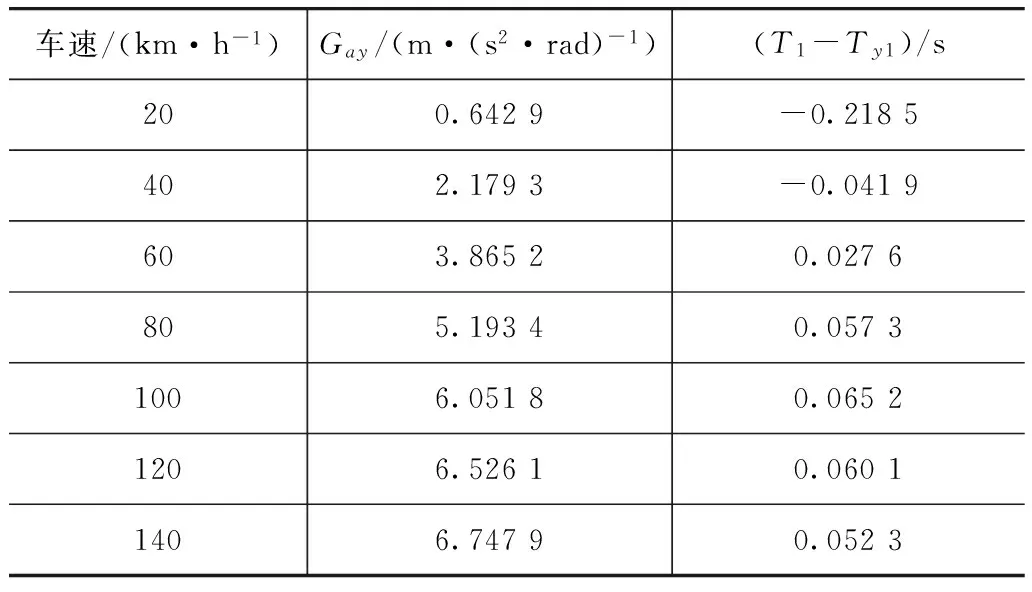
表1 Gay和T1-Ty1在各車(chē)速下的試驗(yàn)值

標(biāo)定車(chē)速/(km·h-1)Gay最大相對(duì)誤差/%T1-Ty1最大相對(duì)誤差/%40-605.7529.240-1204.377.5580-12013.338.5260-1008.9213.03
由圖2可知,Gay和T1-Ty1值與速度整體具有很強(qiáng)的非線性關(guān)系,但是當(dāng)速度低于80km/h時(shí)Gay呈現(xiàn)較強(qiáng)的線性而T1-Ty1呈現(xiàn)很強(qiáng)的非線性,當(dāng)速度超過(guò)80km/h時(shí)Gay呈現(xiàn)較強(qiáng)的非線性而T1-Ty1呈現(xiàn)很強(qiáng)的線性。在標(biāo)定車(chē)速附近計(jì)算值與試驗(yàn)值間的誤差較小,當(dāng)標(biāo)定車(chē)速選擇40與60km/h時(shí)車(chē)速超過(guò)80km/h誤差較大,而當(dāng)標(biāo)定速度選80與120km/h時(shí),車(chē)速在20~40km/h時(shí)誤差較大。由表2可知,當(dāng)標(biāo)定車(chē)速選為40與120km/h時(shí)誤差最小,最大相對(duì)誤差分別為4.37%與7.55%。
因此,選取不同車(chē)速作為標(biāo)定車(chē)速求得的結(jié)果精度不同,當(dāng)兩個(gè)標(biāo)定車(chē)速一個(gè)在低速區(qū)、一個(gè)在高速區(qū)且跨度較大時(shí)計(jì)算結(jié)果更準(zhǔn)確。
3.2 雙移線工況仿真
以C級(jí)樣車(chē)為對(duì)象,在100km/h車(chē)速下進(jìn)行雙移線工況閉環(huán)仿真,首先采用等效2自由度車(chē)輛模型法計(jì)算Gay和T1-Ty1值。等效2自由度法計(jì)算時(shí)需要的車(chē)輛模型參數(shù)值見(jiàn)表3,駕駛員模型參數(shù)見(jiàn)表4。將表3和表4中的參數(shù)代入式(9)得Gay值為16.314 8m/(s2·rad),T1-Ty1值為0.031 6s,代入式(5)和式(6)得C0值0.061 3,TC值為0.331 6s。用得到的C0和TC代入PO預(yù)瞄駕駛員模型中的微分校正環(huán)節(jié)進(jìn)行閉環(huán)仿真得其仿真結(jié)果見(jiàn)圖3。由圖可知,等效2自由度法確定參數(shù)的行駛軌跡對(duì)預(yù)期軌跡的跟蹤誤差較大。當(dāng)采用傳統(tǒng)的等效2自由度方法求微分校正環(huán)節(jié)的參數(shù)時(shí),進(jìn)行100km/h雙移線工況閉環(huán)仿真,最大跟隨誤差為1.989m,最大轉(zhuǎn)向盤(pán)轉(zhuǎn)角為18.287°,最大側(cè)向加速度為0.105 9g。
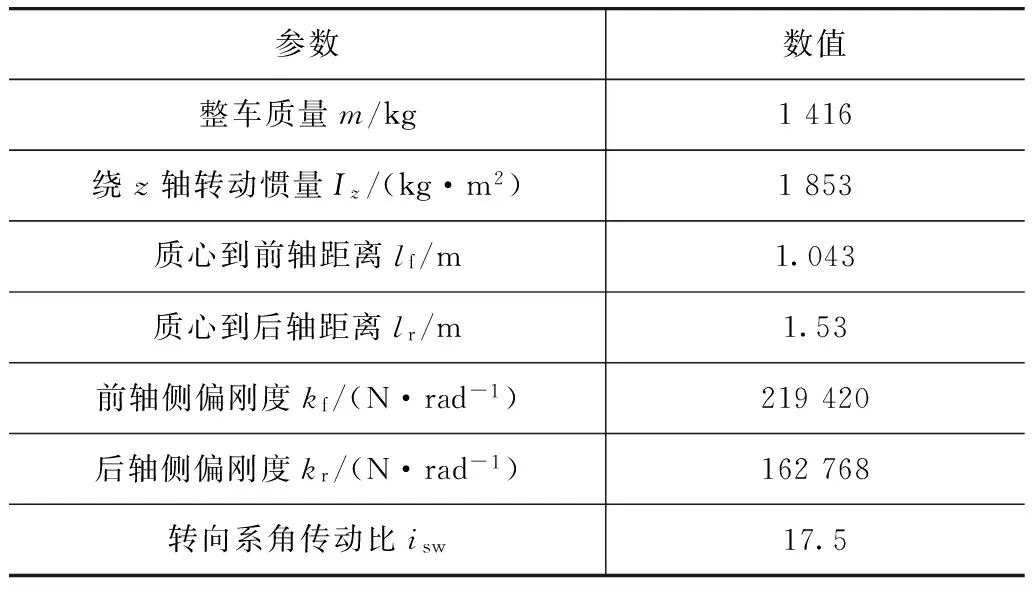
表3 等效2自由度車(chē)輛模型參數(shù)
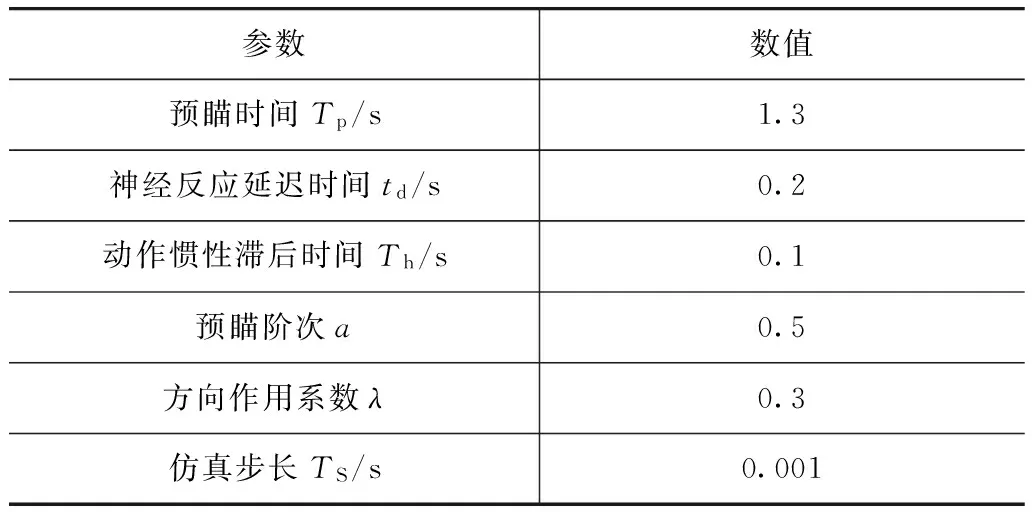
表4 駕駛員模型參數(shù)
同樣以C級(jí)樣車(chē)為對(duì)象,采用試驗(yàn)法獲得微分校正環(huán)節(jié)的參數(shù),進(jìn)行雙移線工況閉環(huán)仿真。由圖2可得,在100km/h車(chē)速下的Gay為5.881m/(s2·rad),(T1-Ty1)為0.059s,求得C0值為0.168 7,TC值為0.359 5s,進(jìn)行雙移線工況閉環(huán)仿真,結(jié)果見(jiàn)圖4。由圖可知,采用試驗(yàn)法求得的微分校正環(huán)節(jié)參數(shù),最大跟隨誤差為0.338 41m,最大轉(zhuǎn)向盤(pán)轉(zhuǎn)角為12.808 5°,最大側(cè)向加速度為0.089 4g。
同樣,對(duì)速度60~120km/h間每隔10km/h分別采用等效2自由度法和試驗(yàn)法獲得參數(shù)后進(jìn)行雙移線工況仿真。限于篇幅的原因,在此取兩種方法進(jìn)行雙移線工況仿真的最大跟隨誤差值,見(jiàn)圖5。
由圖5可知,兩種方法進(jìn)行雙移線工況仿真,采用試驗(yàn)法跟隨誤差較小,均在0.5m以下,而采用等效2自由度誤差則較大。采用試驗(yàn)法求得微分校正環(huán)節(jié)參數(shù)進(jìn)行仿真,其跟隨性能有很大的改善,主要原因是采用等效2自由度法計(jì)算時(shí),前軸和后軸的側(cè)偏剛度與載荷及載荷轉(zhuǎn)移等有關(guān),但不是一個(gè)定值,導(dǎo)致求得的Gay和T1-Ty1與真實(shí)值相差較大。而采用試驗(yàn)法可以準(zhǔn)確計(jì)算出這兩個(gè)參數(shù)的值,進(jìn)而準(zhǔn)確求得微分校正環(huán)節(jié)的參數(shù)。
3.3 蛇行工況仿真
以C級(jí)樣車(chē)為仿真對(duì)象,在60km/h車(chē)速下進(jìn)行蛇行工況閉環(huán)仿真。
采用等效2自由度法求得在60km/h時(shí)Gay為3.734m/(s2·rad),(T1-Ty1)為0.025 04s。進(jìn)一步求得C0值為0.165 2,TC值為0.261 6s,仿真結(jié)果見(jiàn)圖6。駕駛員其他參數(shù)見(jiàn)表4。在采用試驗(yàn)法下求得的Gay為3.734m/(s2·rad),(T1-Ty1)為0.025 04s,得到C0值為0.258 7,TC值為0.327 6s。仿真結(jié)果如圖7所示。
對(duì)速度60~120km/h間每隔10km/h分別采用等效2自由度法和試驗(yàn)法獲得參數(shù)后進(jìn)行蛇行工況仿真,取兩種方法進(jìn)行雙移線工況仿真的最大跟隨誤差值如圖8所示。
由圖6可知,當(dāng)采用傳統(tǒng)的等效2自由度的方法求微分校正環(huán)節(jié)的參數(shù)時(shí),進(jìn)行60km/h蛇行工況閉環(huán)仿真,最大跟隨誤差為0.808 6m,最大轉(zhuǎn)向盤(pán)轉(zhuǎn)角為36.411 9°,最大側(cè)向加速度為0.255 9g,系統(tǒng)對(duì)路徑的跟隨具有很大的跟隨誤差。由圖7可知,采用試驗(yàn)法求得參數(shù)進(jìn)行蛇行工況仿真,最大跟隨誤差為0.106 18m,轉(zhuǎn)向盤(pán)轉(zhuǎn)角最大值為52.356 4°,最大側(cè)向加速度為0.365 62g。由圖8可知,不同車(chē)速下采用試驗(yàn)法確定校正環(huán)節(jié)參數(shù)進(jìn)行蛇行工況仿真,其跟隨誤差都要小于采用等效2自由度法,采用試驗(yàn)法進(jìn)行蛇行工況仿真其跟隨誤差均在0.5m以下。人-車(chē)閉環(huán)仿真系統(tǒng)對(duì)蛇行工況的跟隨性有顯著的提高,能很好地完成蛇行工況。
4 結(jié)論
針對(duì)預(yù)瞄駕駛員模型中校正環(huán)節(jié)參數(shù)與速度具有很強(qiáng)的非線性難以直接求解的難點(diǎn),當(dāng)被控對(duì)象為多自由度車(chē)輛模型或真實(shí)車(chē)輛時(shí)很難直接給出其具體表達(dá)式等特點(diǎn),提出一種基于試驗(yàn)數(shù)據(jù)求預(yù)瞄駕駛員模型校正環(huán)節(jié)參數(shù)的方法。在兩個(gè)標(biāo)定車(chē)速下進(jìn)行轉(zhuǎn)向盤(pán)角階躍試驗(yàn)求得在這兩個(gè)標(biāo)定車(chē)速下的相關(guān)參數(shù),快速外推所需參數(shù)與速度的關(guān)系,計(jì)算出各參數(shù)在不同車(chē)速下的準(zhǔn)確值,通過(guò)試驗(yàn)分析可得到如下結(jié)論。
(1) 只需要進(jìn)行兩個(gè)特定速度下的角階躍試驗(yàn)便可快速求出任意車(chē)速下Gay,T1,Ty1的值,進(jìn)而求出預(yù)瞄跟隨駕駛員模型中的校正環(huán)節(jié)的表達(dá)式,無(wú)需獲得其他車(chē)輛參數(shù)。當(dāng)被控對(duì)象為復(fù)雜的多自由度車(chē)輛模型時(shí)仍能具有很高的精確度。
(2) 選取多組車(chē)速作為標(biāo)定車(chē)速進(jìn)行計(jì)算,結(jié)果表明,當(dāng)兩個(gè)標(biāo)定車(chē)速一個(gè)在低速區(qū)、一個(gè)在高速區(qū)且跨度較大時(shí)求得的表達(dá)式更準(zhǔn)確,計(jì)算結(jié)果更接近真實(shí)試驗(yàn)值。
(3)采用試驗(yàn)法得到的校正環(huán)節(jié)參數(shù)的預(yù)瞄跟隨駕駛員模型的人車(chē)閉環(huán)仿真結(jié)果表明,采用試驗(yàn)法求得的校正環(huán)節(jié)的駕駛員對(duì)路徑具有很好的跟隨特性,可以很大程度上改善跟隨誤差,更為準(zhǔn)確地用于人-車(chē)閉環(huán)仿真和智能車(chē)輛控制。
[1] GUO Konghui, GUAN Hsin. Modelling of driver vehicle directional control system[J]. Vehicle System Dynamics,1993,22(3):141-184.
[2] GUZZELLA Lino, SCIARRETTA Antonio. Vehicle propulsion system[M]. Springer Berlin Heidelberg,2007.
[3] CAO J, LU H, GUO K, et al. A driver modeling based on the preview-follower theory and the jerky dynamics[J]. Mathematical Problems in Engineering,2013(4):321-324.
[4] 白艷.汽車(chē)易駕駛性評(píng)價(jià)的隨機(jī)駕駛員模型[D].長(zhǎng)春:吉林大學(xué),2012.
[5] HUANG X C. Driver modeling and simulation based on improved preview follower algorithm[J]. Applied Mechanics & Materials,2013,321-324:847-851.
[6] 管欣,張立增,賈鑫.誤差分析法求解PO預(yù)瞄駕駛員模型參數(shù)[J].汽車(chē)工程,2014,36(2).
[7] 管欣.駕駛員方向控制模型及閉環(huán)駕駛員安全性預(yù)測(cè)方法的研究[D].長(zhǎng)春:吉林工業(yè)大學(xué),1992.
[8] 郭孔輝.汽車(chē)操縱動(dòng)力學(xué)原理[M].南京:江蘇科學(xué)技術(shù)出版社,2011.
[9] BAI Yan, CROLLA D A, GUAN Hsin, et al. Linear vehicle model identification under different speed based on ARMA model[C]. SAE Paper 2012-01-0249.
[10] 唐林軍.駕駛員方向控制模型的控制校正環(huán)節(jié)的研究[D].長(zhǎng)春:吉林大學(xué),2008.
[11] MANNING W. Vehicle handling dynamics[M]. Butterworth-Heinemann/Elsevier,2009.
The Determination Method of Parameters in CorrectionLink of Preview-Follower Driver Model
Guan Xin, Chen Yongshang, Jia Xin, Zhang Lizeng & Zhan Jun
JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130022
The accuracies of parameters in correction link of preview-follower driver model directly affect the accuracy of position control, but these parameters are hard to determine directly due to their strong nonlinear relationship with vehicle speed. Besides, for multi-DOF complex vehicle model, the simplified equivalent 2-DOF method will inevitably bring about the position following error. In this paper, a solving method of the parameters in correction link for arbitrary speed is proposed. Firstly, the related parameters for two specific speeds are calculated. Then, the relationship expression between correction parameters and speed is derived. Finally double lane change and slalom simulation tests are conducted on CarSim C class car in MATLAB/Simulink environment. The results show that the driver model with the correction parameters solved by the method proposed has better path following performance and a higher accuracy when used in human-vehicle closed-loop simulation.
vehicle; driver model; correction link; parameter determination
原稿收到日期為2015年5月14日,修改稿收到日期為2015年8月5日。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車(chē)電器(2018年1期)2018-06-05 01:22:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03