純電動汽車電液復合回饋制動研究*
2016-04-12 02:05:24劉志強汪浩磊杜榮華楊中華
汽車工程 2016年8期
關鍵詞:分配
劉志強,汪浩磊,杜榮華,楊中華
(1. 長沙理工大學汽車與機械工程學院,長沙 410114; 2.長沙中成汽車零部件有限公司技術部, 長沙 410114)
2016150
純電動汽車電液復合回饋制動研究*
劉志強1,汪浩磊1,杜榮華1,楊中華2
(1. 長沙理工大學汽車與機械工程學院,長沙 410114; 2.長沙中成汽車零部件有限公司技術部, 長沙 410114)
通過對電動汽車制動能量回饋約束條件的分析,制定了一種基于制動能量回收最大化的電液復合制動力協調式控制策略。設計了以車速、制動強度、蓄電池SOC為輸入,回饋制動比例為輸出的電液復合制動力模糊分配控制器,建立了電液復合制動力分配模型,并進行了仿真分析。同時,設計了一種縮小比例的電液復合回饋制動模擬實驗臺,進行模擬實驗,通過仿真分析和模擬實驗,驗證了該策略的可行性。
電動汽車;電液復合回饋制動;模糊控制
前言
制動能量回饋技術是電動汽車電液復合制動領域最為重要的研究內容之一,目的是在確保車輛制動穩定基礎上,充分回收制動能量,以提高車輛能量經濟性。根據回饋制動和液壓制動的分配關系,制動能量回饋技術可分為疊加式和協調式[1]。
疊加式制動能量回饋系統不改變原有摩擦制動力,直接將電機回饋制動力疊加于摩擦制動力。該控制策略實施簡單,但其回饋效率低,制動感覺較差[2-4]。協調式制動能量回饋系統則是優先使用電機回饋制動力,同時協調控制液壓制動力,使液壓制動力和電機回饋制動力之和與總制動需求一致,因而回饋效率高,制動感覺好,但實施較為復雜[5-6]。協調式制動能量回饋系統憑借其回饋效率高、制動感覺良好和制動安全可靠等優勢而逐漸成為研究重點。
國內對協調式電液復合回饋制動力分配的研究多為仿真分析。如文獻[7]~文獻[11]中利用模糊控制對電液復合回饋制動力進行了分配,但有的未顧全到影響制動能量回饋的主要因素,有的未進行實驗驗證。本文中以模糊控制策略為基礎,設計了以蓄電池荷電狀態SOC、制動強度、車速為輸入,回饋制動比例為輸出的電液復合制動力分配模糊控制器,以制動能量最大化為目的,協調控制回饋制動和液壓制動,最后進行仿真和模擬實驗。
1 制動能量回饋約束條件
1.1 可利用的制動能量
集中驅動純電動汽車制動能量傳遞路徑如圖1所示。
電動汽車在制動過程中,動能經驅動輪傳遞到機械傳動裝置,再驅動電機(電動機轉變為發電機)發電,最后回饋到蓄能裝置。可利用的制動能量E可表示為
(1)
式中:η為機械傳動效率;K1為電機發電效率;K2為蓄電池的充電效率;m為汽車總質量;v0和v1分別為制動起始車速和終止車速;v為汽車瞬時速度;s為制動距離;Fi為坡道阻力;Ff為滾動阻力;Fw為空氣阻力;Fu為液壓制動力。
由式(1)可知,影響電動汽車制動能量回饋的因素有η,K1,K2,m,v和制動強度z。由于η和m不變,故影響制動能量回饋的主要因素為z,v,蓄電池SOC和電機再生制動特性。
1.2 安全制動范圍
車輛安全制動范圍由以下幾條曲線構成[12-14]。
(1)I曲線:理想的前后輪制動力分配曲線。
(2)f曲線:前輪抱死、后輪不抱死時,前、后輪制動力分配曲線。
(3)M曲線:根據ECE R13-H制動法規,前輪抱死時,為保持車輛穩定和制動效率,后輪必須具有一定的制動力。后輪的最小地面制動力與前輪地面制動力的關系曲線稱為M曲線。
車輛安全制動范圍可用圖2中閉合曲面0ABC0表示。
1.3 電機回饋制動特性
無刷直流電機在發電狀態下的特性與其在驅動狀態下的特性基本一樣。當電機轉速高于額定轉速時以額定功率制動;當電機轉速低于額定轉速時,以額定轉矩制動,其表達式[15]為
(2)
式中:T為制動轉矩;Tn為電機額定轉矩;nN為額定轉速;Pn為電機額定功率;n為電機轉速。
車輛制動時,當電機轉速低于某一臨界速度nH時,電樞反電勢過低致使再生制動效果迅速減低;當電機下降至另一臨界速度nL時,再生制動消失[16]。于是修正后的電機再生制動轉矩為
Tr=φ(n)T
(3)
(4)
式中φ(n)為修正系數,其值與電機轉速有關。
由此可得Tr傳遞到驅動輪邊的制動力Fr為
(5)
式中:ig為電動汽車主減速器傳動比;i0為電動汽車變速器傳動比;r為車輪半徑。
2 電液復合制動力模糊分配
車輛需求制動力取決于制動強度,根據制動強度的不同,電液制動力分配原則[17]為:當z<0.1時,僅電機制動(前驅動輪);當0.1≤z≤0.7時,前輪(驅動輪)采用電液復合制動,后輪施加相應的液壓制動;當z>0.7時,再生制動系統停止工作,前、后輪均施加液壓制動,以保證制動安全。
2.1 電液復合制動力模糊分配總體結構
本文中所設計的電液復合制動力模糊分配總體結構如圖3所示,模糊控制器的輸入為z,v和蓄電池SOC,經過模糊控制得到再生制動分配比例Kr(定義為前軸回饋制動力與前軸需求總制動力之比),進而得到前輪再生制動力;實際電液制動力分配模塊的功能是比較電機再生制動能力與前輪再生制動力的大小,并取其小者作為前輪再生制動力控制點同時協調前輪液壓制動力。
2.2 模糊控制器的設計
(1)隸屬度函數
規定電液復合制動力模糊控制器的輸入量模糊子集分別為:E(v)={L,M,H},范圍為0~100km/h;E(SOC)={L,M,H},范圍為0~1;E(z)={L,M,H},范圍為0~1;輸出量再生制動比例系數的模糊子集為:E(Kr)={L,M,H},范圍為0~1,根據相關理論與經驗和仿真分析,設計出v,z,蓄電池SOC和Kr的隸屬度函數,如圖4所示。
(2)模糊規則
在制定電液復合制動力模糊規則時,既要保證車輛的安全性和舒適性,又要最大限度地回收制動能量,根據實際經驗和仿真,總結出的模糊規則見表1。
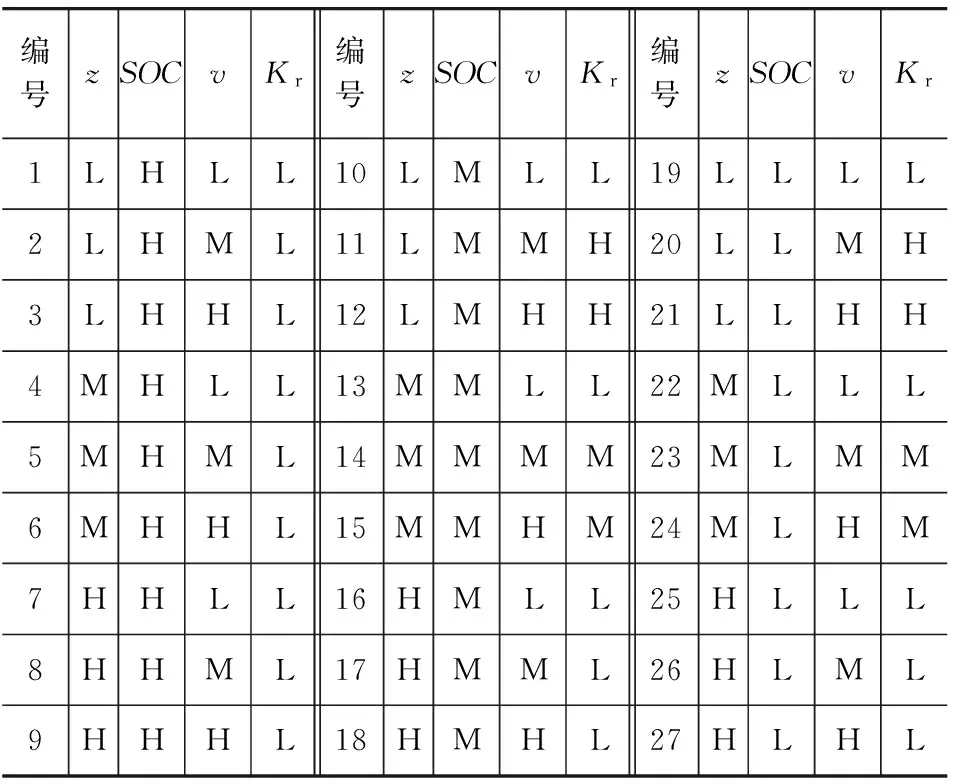
表1 電液復合制動力模糊規則表
(3) 輸出量的清晰化
由于模糊規則表輸出的控制量是一個模糊量,而實際的控制量應為確定量,故應進行輸出量的清晰化。對任意采樣時刻的輸入量,由圖4確定隸屬度,根據表1進行模糊集運算得到規則的隸屬度(用βi表示),再根據此隸屬度計算對應規則的輸出kri,然后采用加權平均法進行輸出量的清晰化[18],求得任意采樣時刻電機再生制動所占的比例為
(6)
2.3 電液復合制動力分配模型
根據所設計的模糊控制策略,在MATLAB/ Simulink中搭建的電液復合制動力分配模型如圖5所示。該模型主要包括制動意圖辨識模塊、制動強度計算模塊、驅動軸制動力模塊、電液復合制動力模糊分配模塊、電機運動模塊和實際電液制動力分配模塊。
在車輛安全制動范圍內,電液復合制動力分配流程如下。
(1)駕駛員制動意圖辨識模塊根據制動踏板角速度以及位移判斷汽車的制動工況。
(2)由驅動軸制動力模塊計算出車輛驅動軸總制動力Fxb1。
(3)電液復合制動模糊控制的輸入量為蓄電池荷電狀態、制動強度和車速,輸出量是回饋制動分配比例,以確定驅動軸再生制動力Fz。
(4)由電機制動力模塊可得到電機傳遞到驅動軸的電機制動力Fre。
(5)根據制動力分配模塊,在車輛安全制動范圍內,以充分利用電機制動力為目標,當電機制動力滿足驅動軸再生制動力時,以回饋制動力為控制點;若電機制動力滿足不了汽車驅動軸再生制動力,以電機制動力為控制作用點,協調液壓制動力。
3 電液復合回饋制動仿真和模擬實驗
電液復合制動力模糊分配模型所模擬的前置前驅型電動汽車的參數:質量為640kg,質心高度為400mm,軸距為1 765m,質心至前軸距離為900mm,風阻系數為0.4,迎風面積為1.2m2,滾動阻力系數為0.009,車輪半徑為0.26 m,固定齒比變速器變速比為3,電機額定功率為18kW,額定轉矩為68N·m,最高轉速為4 000 r/min,額定轉速為2 500r/min;蓄電池為額定電壓12V、容量20A·h的4個鉛酸電池串聯。
考慮到實驗臺經濟性及安全性,實驗臺應用了縮比原理,縮比常數為6,磁粉制動器制動轉矩和電機制動轉矩分別模擬液壓制動和回饋制動,實驗臺控制系統基于LabVIEW開發,回饋能量由容量Cf為4.545F的超級電容組吸收,實物如圖6所示[19]。根據縮比原理,實驗臺所選擇的無刷直流電機的參數:額定功率為3kW,額定電壓為48V,額定轉矩為10.5N·m,額定轉速為2 500r/min,飛輪轉動慣量j=0.75kg·m2;用磁粉制動器制動轉矩和電機制動轉矩分別模擬液壓制動和回饋制動;實驗臺控制系統基于LabVIEW開發。
根據縮比模型的參數進行仿真,仿真的初始條件是:蓄電池初始SOC為0.5;制動初速度v0=50km/h,對應的電機目標角速度ω0=160rad/s;制動工況為10°/s勻速轉動制動踏板。仿真過程分為兩部分。第一部分為電液復合制動力模糊分配,仿真結果見圖7。
仿真的第二部分主要考察從電機發電到蓄能單元的整體效率。建立電機發電模型,采用電流滯環控制模擬電機制動轉矩,對電機的回饋制動過程進行仿真分析。當電機從靜止狀態運行至目標轉速時,開始制動。仿真結果如圖8所示。由圖可知,0.8s時,電機由驅動模式切換到回饋制動模式。電機制動轉矩隨轉速下降速率上升而增加,當轉速下降至400r/min左右時,電樞反電勢過低致使回饋制動效果下降;當轉速降低到40r/min左右時,回饋制動效果消失。
設最終能夠回饋到蓄能單元的制動能量為Er,定義Er/E2為可回收制動能量利用率,由圖8轉換計算,在仿真工況下,可回收制動能量利用率為18.9%,并進一步得到有效能量回收率Er/E1為8.92%。
模擬實驗工況與仿真工況相同。但為較準確計算能量回收,采用超級電容組吸收回饋制動能量。超級電容組由單體容量100F、額定電壓2.7V的22個法拉電容串聯組成,容量為4.545F。吸收的回饋能量由下式計算:
(7)
式中:Cf超級電容組容量,U0,U1分別為電容組端電壓起止電壓。
圖9為模擬實驗臺實驗結果。圖中顯示的電壓信號與所測轉矩信號成正比,1V電壓代表的轉矩為10N·m,上面的曲線為實際回饋制動轉矩,下面的曲線為磁粉制動轉矩(模擬液壓制動轉矩);A和B分別為電機回饋制動起止時刻,C和D為磁粉制動起止時刻。
將圖9顯示的電壓信號轉換為對應的轉矩信號,與理論液壓制動轉矩和回饋制動轉矩的對比如圖10所示。由圖可見,實驗臺能夠很好地模擬電動汽車電液復合回饋制動過程。
電機回饋制動所產生的制動能量被超級電容組快速吸收,超級電容組兩端電壓的時間歷程曲線如圖11所示。

4 結論
(1)本文中分析了電動汽車制動能量回饋過程、安全制動范圍和電機回饋制動特性,確定了影響制動能量回饋的約束條件。
(2)基于制動能量最大化,設計了以蓄電池SOC、制動強度、車速為輸入,回饋制動比例為輸出的電液復合制動模糊控制策略,仿真結果表明該策略較好地實現了制動能量的回饋。
(3)將本文中提出的電液復合回饋制動控制策略應用于實驗臺,結果表明:采用該控制策略實驗臺能夠回收5.34%的制動能量,控制策略是有效的。實驗臺回收的制動能量與理論相比減少了3.58個百分點,主要與電機實際再生制動特性有關。
[1] 張俊智,呂辰,李禹橦. 電動汽車混合驅動與混合制動系統現狀及展望[J]. 汽車安全與節能學報,2014,5(3):209-223.
[2]YAMATOM.Eco-vehicleassessmentsystem(Eco-VAS):acomprehensiveenvironmentalimpactassessmentsystemfortheentiredevelopmentprocess[J].ToyotaTechnicalReview, 2005, 54(1): 80-85.
[3]ABADIASR,ABBAST,ALIUOG,etal.Electricvehiclecollaboration-ToyotamotorcorporationandTesla[J].IEEEVehTechMag, 2013, 8(4): 4-9.
[4]PRASSERS,JURASCHEKS,HOCKGEIGERE,etal.Bornelectric-conceptandinnovativeelectricdrivetrainofthenewBMWi3 [C].3rdAachenColloquiumChinaAutomobileandEngineTechnology, 2013.
[5]ZHANGJunzhi,KONGDecong,LVChen,etal.Optimizationofcontrolstrategyforregenerativebrakingofanelectrifiedbusequippedwithananti-lockbrakingsystem[J].ProcInstMechEngineers,PartD:JAutomobileEngineering, 2012, 226(4): 494-506.
[6]ZHANGJunzhi,LVChen,GOUJinfang,etal.Cooperativecontrolofregenerativebrakingandhydraulicbrakingofanelectrifiedpassengercar[J].ProcInstMechEngineers,PartD:JAutomobileEngineering, 2012, 226(10): 1289-1302.
[7] 張丹紅, 周加洋, 蘇義鑫. 基于模糊邏輯的HEV再生制動能量回收的研究[J]. 武漢理工大學報, 2011, 33(5): 717-720.
[8] 張亞軍, 楊盼盼. 純電動汽車再生制動系統的建模與仿真[J]. 武漢理工大學學報, 2010, 32(15): 90-94.
[9] 劉輝, 王偉達, 何嬌 等. 基于模糊控制的混合動力電動車再生制動系統的建模與仿真[J]. 汽車工程, 2012, 34(1):51-56.
[10] 杜冠磊, 馬向華. 基于模糊邏輯的混合動力汽車制動力動態控制策略研究[J]. 自動化技術與應用, 2013, 32(1): 17-20.
[11] 孫大許, 蘭鳳崇, 陳吉清. 基于I線制動力分配的四驅純電動汽車制動能量回收策略的研究[J]. 汽車工程, 2013, 35(12): 1057-1061.
[12] 劉志強, 過學迅. 純電動汽車電液復合再生制動控制[J].中南大學學報(自然科學版), 2011, 42(9):2687-2691.
[13] 余志生. 汽車理論[M]. 北京: 機械工業出版社, 2009.
[14] 石慶升,張承慧,崔納新. 一種新型的電動汽車再生制動力分配策略[J]. 電工技術學報, 2007, 22(2):125-130.
[15]EHSANIM,GAOYimin,GAYS.Characterizationofelectricmotordrivesfortractionapplications[C].IEEE,The29thAnnualConferenceoftheIEEE,2003,3:891-896.
[16] 王保華,張建武,羅永革. 并聯混合動力客車再生制動仿真研究[J].汽車工程,2005,27(6):648-651.
[17]GAOYimin,EHSANIM.ElectronicbrakingsystemofEVandHEV-integrationofregenerativebraking[J].AutomaticBrakingForceControlandABS,2001(1):2478-2481.
[18] 張健,王耀南,曹松波. 基于模糊邏輯的電動汽車制動能量回饋控制策略[J]. 工業控制計算機, 2005, 18(7): 59- 61.
[19] 汪浩磊.電動汽車機電復合回饋制動研究[D].長沙:長沙理工大學汽車與機械工程學院,2015:39-53.
A Research on Electro-Hydraulic Compound Regenerative Braking for Battery Electric Vehicle
Liu Zhiqiang1, Wang Haolei1, Du Ronghua1& Yang Zhonghua2
1.SchoolofAutomotiveandMechanicalEngineering,ChangshaUniversityofScienceandTechnology,Changsha410114;2.ChangshaZhongchengAutomotiveComponentsCo.,Ltd.,Changsha410114
Based on an analysis of the constraints on the braking energy recovery of electric vehicle, a coordinated control strategy for the braking force distribution of an electro-hydraulic-compound brake is formulated aiming at maximizing the braking energy recovered. A fuzzy controller for the braking force distribution of electro-hydraulic compound brake is designed with vehicle speed, braking intensity and battery SOC as inputs and the proportion of regenerative braking as output. Then a braking force distribution model for electro-hydraulic compound brake is established with a corresponding simulation conducted. Meanwhile a scaled down test bench is developed and an analogical test is performed. The results of simulation and test verify the feasibility of the strategy proposed.
EV; electro-hydraulic compound regenerative braking; fuzzy control
*國家自然科學基金(11572055)、交通運輸部基礎應用研究項目 (2013319825090)和長沙市科技局項目(K1301006-11)資助。
原稿收到日期為2015年1月31日,修改稿收到日期為2016年4月18日。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40