基于多循環工況的混合動力汽車參數優化研究*
2016-04-12 02:05:23秦大同曾育平
汽車工程 2016年8期
詹 森,秦大同,曾育平
(重慶大學,機械傳動國家重點實驗室,重慶 400044)
2016145
基于多循環工況的混合動力汽車參數優化研究*
詹 森,秦大同,曾育平
(重慶大學,機械傳動國家重點實驗室,重慶 400044)
針對基于單一循環工況的混合動力汽車參數優化存在優化后的參數可能不適用于其它循環工況和整車的燃油經濟性未必能達到最優的問題,本文提出了基于多循環工況的混合動力汽車參數優化方法。以整車燃油消耗量最小化作為優化目標,以動力系統參數和控制策略相關參數為優化變量,建立基于遺傳算法和Matlab/Similink模塊的優化模型,分別進行基于單一循環工況和基于多循環工況的混合動力汽車的優化。結果表明,與基于單一循環工況的優化相比,在保證車輛動力性的前提下,基于多循環工況的優化結果,不僅可適用于多種行駛工況,而且能進一步提高整車的燃油經濟性。
混合動力汽車;參數優化;遺傳算法;多循環工況
前言
混合動力汽車的動力系統由多個動力源組成,通過控制策略實現需求功率在多個動力源之間的合理分配和動力系統各部件之間的協調控制,從而提高整車的燃油經濟性。混合動力汽車的參數優化是在滿足車輛動力性能和各部件性能約束的前提下,以整車的燃油經濟性或動力性為目標,同時優化動力系統參數和控制策略的相關參數[1-2]。
文獻[3]中以等效燃油消耗量和加速時間為優化目標,運用帶精英策略的非支配排序遺傳算法和iSIGHT優化軟件,選用NEDC工況對傳動系參數進行多目標優化。文獻[4]中利用權重系數變換法將多目標優化問題轉換為單目標優化問題,并以百公里燃油消耗量和排放性能為目標函數,通過UDDS工況對整車的動力系統參數和控制策略參數同時進行優化。文獻[5]中提出一種以動力系統功率最小化為目標、動力性能指標為約束條件的參數優化匹配方法,利用CYC_NurembergR36工況對混合動力汽車的動力系統參數進行優化。文獻[6]中以燃油消耗量和排放作為優化目標,以CYC-1015為優化仿真模型的輸入工況,通過帶精英策略的非支配排序遺傳算法對動力系統部件的參數和控制策略參數進行優化。目前研究主要是針對某種典型工況完成混合動力汽車參數優化,但在其它工況下,該方法所得到的優化參數可能不適用,整車燃油經濟性也不一定能達到最優。
為了解決上述問題,本文中提出基于多工況的混合動力汽車參數優化方法,并以某ISG混合動力汽車為例,將整車的燃油消耗量作為優化的目標函數,以動力性設計指標為約束條件,以動力系統參數和控制策略相關參數為優化對象,建立基于遺傳算法和Matlab/Similink模塊的優化仿真模型,運用仿真模型分別針對單一工況和多工況進行參數優化。結果表明:針對多工況進行優化所獲得的優化參數不僅可適用于多種工況,且可進一步提高整車的燃油經濟性。
1 整車動力系統及基本參數
本文中研究的混合動力系統如圖1所示。系統主要由發動機、ISG電機、濕式多片離合器C1、無級變速器CVT、電池組和主減速器等部件組成。整車控制器通過控制濕式多片離合器、ISG電機、CVT和發動機實現工作模式的切換;通過CAN總線實現與發動機控制器、電機控制器、電池管理系統和CVT控制器的通信,監測車輛的運行狀態,完成對ISG電機和發動機工作模式及轉矩轉速的控制。該混合動力汽車的部分基本參數如表1所示。
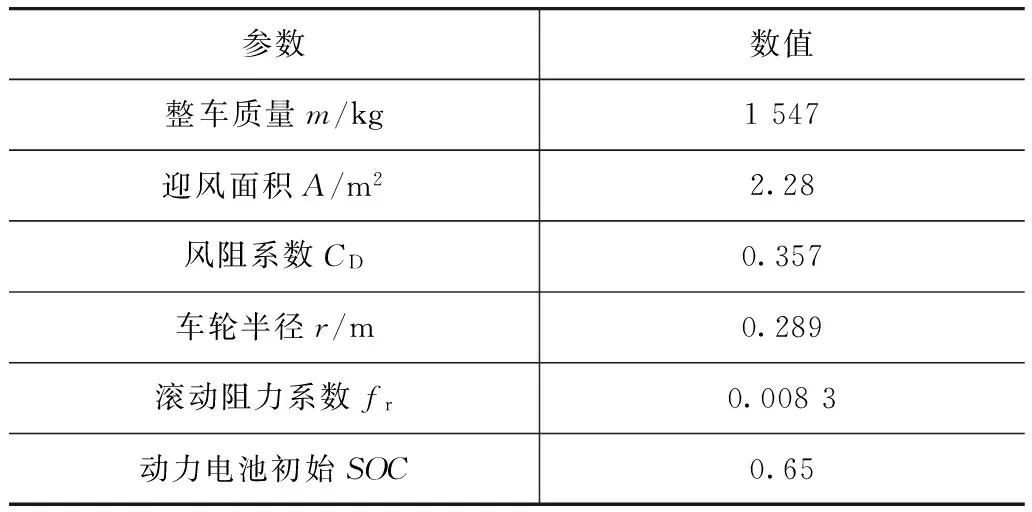
參數數值整車質量m/kg1547迎風面積A/m22.28風阻系數CD0.357車輪半徑r/m0.289滾動阻力系數fr0.0083動力電池初始SOC0.65
2 混合動力汽車參數優化設計
2.1 目標函數
本文中參數優化的目標:在滿足車輛動力性能和各部件性能約束的前提下,盡可能降低整車的燃油消耗量。因此,參數優化的目標函數f(x)為
(1)
式中:Fuel(x)為燃油消耗量;x為包含了動力系統參數和控制策略相關參數的向量;Ω為可能的解空間;hi(x)≤0為約束條件;N為約束條件的數量。
2.2 優化參數的選擇
混合動力汽車具有大量的設計參數,如果對所有的設計參數進行優化并不現實,因此只能選擇對車輛性能具有較大影響的動力系統參數和控制策略相關參數進行優化才符合實際[1]。
本文中以邏輯門限控制策略作為整車的控制策略。優化變量的選擇包括4個動力系統參數:發動機功率Pe、電機功率Pm、電池容量Qb和主傳動比I0,以及3個與控制策略相關的參數:純電動車速限制vmotor、發動機單獨工作上限系數ηmax和發動機單獨工作下限系數ηmin。vmotor限定了純電動模式切換到發動機單獨驅動和混合驅動模式的速度;設發動機轉矩效率最佳曲線為engine_best,需求轉矩在engine_best*(1+ηmax)和engine_best*(1-ηmin)之間時整車為發動機單獨驅動模式;需求轉矩在engine_best*(1+ηmax)以上時為聯合驅動模式;需求轉矩在engine_best*(1-ηmin)以下時為行車充電模式。最終選擇的7個優化參數如表2所示,其中優化參數的初始值為原型車對應的參數數值,優化參數的上下限是綜合考慮整車基本性能的要求、整車經濟成本和設計經驗的結果。
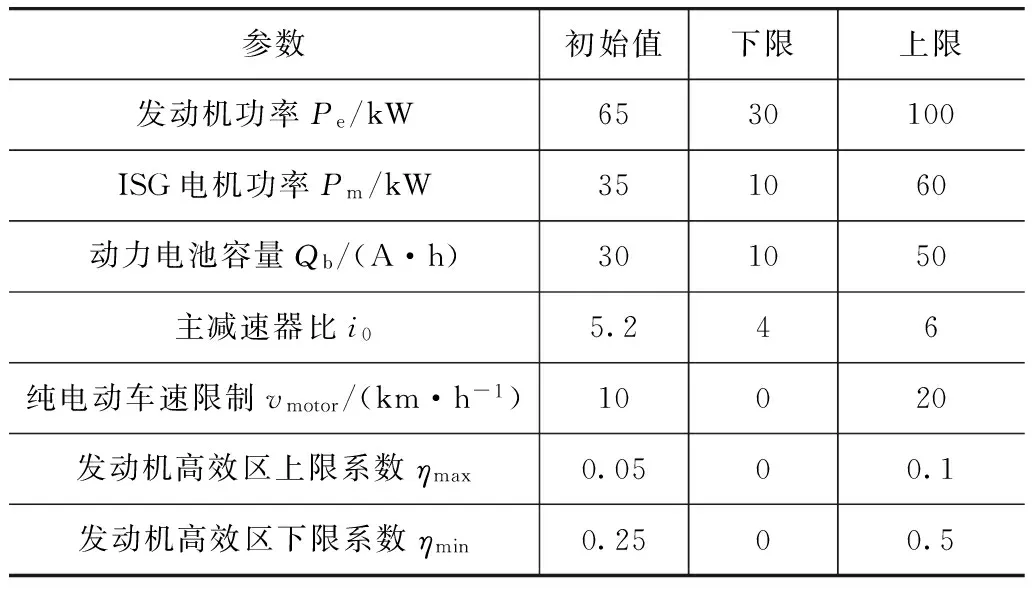
表2 優化參數
2.3 參數優化的約束條件
在進行混合動力汽車參數優化時,除了盡可能降低油耗外,還必須使汽車滿足動力性能的要求。本文中采用PGNV中對轎車性能所提出的動力性指標作為約束[7],如表3所示。
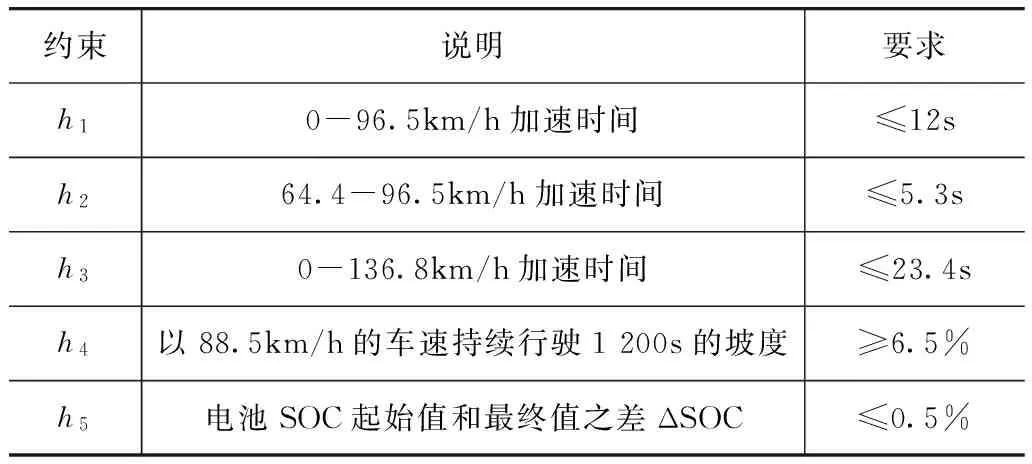
表3 約束條件
3 基于單一工況的混合動力汽車參數優化與結果分析
3.1 基于單一工況的混合動力汽車參數優化方法
本文中將遺傳算法同Matlab/Simulink相結合,建立了混合動力汽車參數優化仿真模型,以此實現針對混合動力汽車動力系統參數和控制策略相關參數的優化。基于單一工況的混合動力汽車參數優化方法流程如圖2所示,具體過程如下:
(1) 初始化待優化的動力系統參數和控制策略相關參數;
(2) 確定優化所針對的行駛工況;
(3) 將所獲得的待優化參數應用到混合動力汽車參數優化仿真模型中;
(4) 根據所選用的行駛工況,運行仿真模型計算出適應度函數的值;
(5) 如果適應度函數的值滿足終止條件,終止程序,得到最優參數;
(6) 若不滿足,應用遺傳算法進行選擇、保留精英、交叉、變異,產生新的種群,回到步驟(3)。
所采用的遺傳算法參數設置如表4所示。
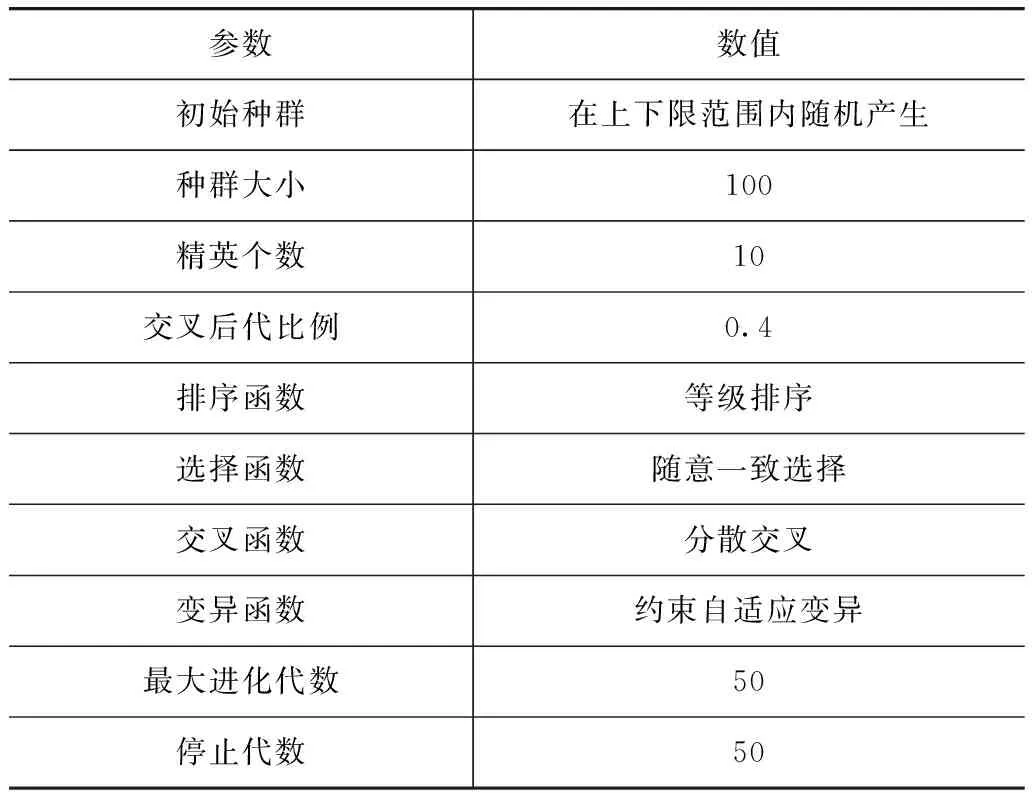
表4 遺傳算法參數設置
3.2 基于單一工況的混合動力汽車參數優化的結果分析
按照行駛工況數據反映的車輛行駛區域和交通狀況的不同,行駛工況可以分為擁堵工況、城市工況、郊區工況和高速工況[8]。
選用6種典型工況進行基于單一工況的混合動力汽車參數優化,用于比較不同工況下參數優化結果的差異。6種工況為NEDC(A1),NYCC(A2),UDDS(A3),CYC_WVUSUB(A4),HWFET(A5)和CQCYC(A6),如圖3所示。其中:NYCC為擁堵工況,主要在城市中心地帶,交通擁堵,汽車走走停停;UDDS為城市工況,與擁堵工況相比,車速有所提高,但依然存在走走停停;CYC_WVUSUB為郊區工況,主要是城市郊區或鄉村道路,車輛常以中速行駛;HWFET為高速路工況,車速高,駕駛平穩,有最低限制;NEDC作為輕型車排放油耗試驗工況,常用于汽車的設計之中;CQCYC是我國某城市的典型工況。
6種典型工況對應的優化結果如表5所示。由表可見,對于不同的行駛工況可以獲得不同的優化參數結果,而且優化參數結果之間存在較大的差異。
對于某一種工況,當車輛采用其它工況下所得的優化參數時,車輛運行完該工況后,電池SOC最終值可能是不同的,這種情況下不能直接通過油耗來判斷優化參數的優劣。但是可以通過某一種工況下得到的優化參數是否能讓整車在其它工況下依然滿足所設定的約束條件來判斷該優化參數的適用性。
以針對NEDC工況獲得的參數優化結果為例,將該結果應用于各個典型工況,通過比較電池SOC起始值和最終值之差ΔSOC是否小于等于0.5%(即約束條件h5)來判斷該優化參數結果在各個典型工況下的適用性,結果如圖4所示。
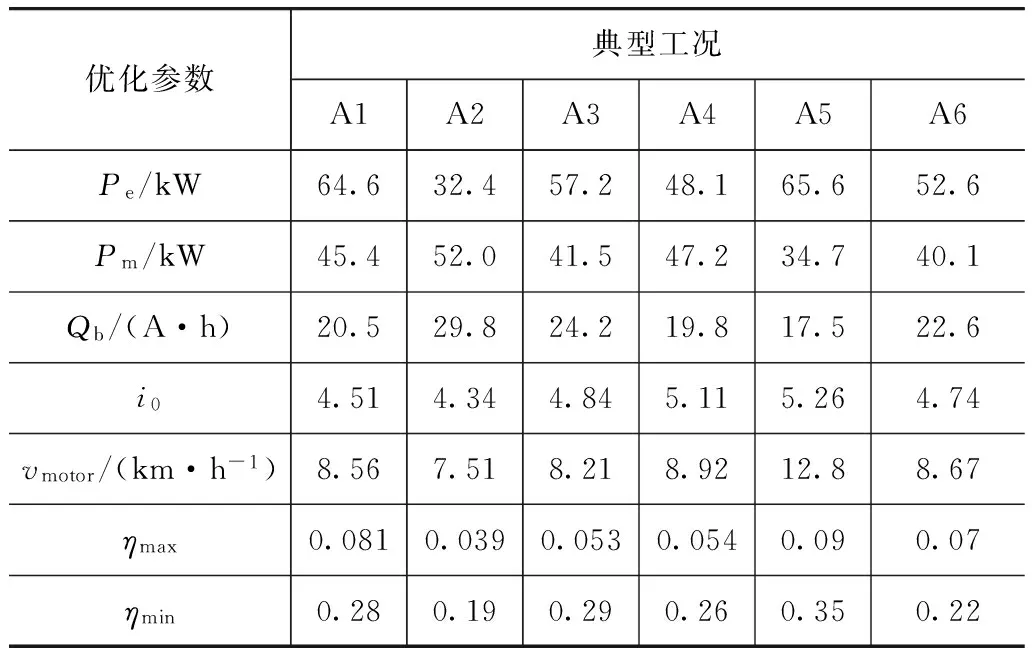
表5 不同典型工況下參數優化的結果
由圖4可見,6種典型工況下電池的最終SOC分別為0.647,0.653,0.648,0.604,0.620和0.633,與之對應的ΔSOC分別為0.47%,0.46%,0.31%,7.08%,4.6%和2.6%。所以針對NEDC工況的優化參數結果,在NEDC,NYCC和UDDS工況下能使整車滿足約束條件,而在CYC_WVUSUB,HWFET和CQCYC工況下整車不能滿足約束條件。
因此基于單一工況的混合動力汽車參數優化存在一定的不足:一方面,針對不同的工況得到優化參數可能存在差異,這種差異導致參數優化時如果選擇的工況不同,最終的整車燃油經濟性也可能存在差異;另一方面,某工況下的優化參數結果應用在其它工況下時,整車不一定能滿足所設定的約束條件,當車輛無法滿足所設定的約束條件時,會對整車的經濟性或者動力性產生不利的影響。
4 基于多工況的混合動力汽車參數優化與結果分析
4.1 基于多工況的混合動力汽車參數優化方法
基于多工況的混合動力汽車參數優化方法的重點問題在于不僅需要整車在多種工況下都滿足所設定的約束條件,而且整車在運行完各個工況后的燃油經濟性要到達最優。因此需要在基于單一工況的混合動力汽車參數優化的基礎上,通過構建復合工況和改變約束條件的應用方法,實現針對多工況的參數優化。
(1) 復合工況的構建
復合工況是由多個典型工況拼接而成,以復合工況W1為例,該工況是由NEDC,CQCYC,NYCC,UDDS,CYC_WVUSUB和HWFET工況拼接而成,如圖5所示。
(2) 改變約束條件的應用方法
如果采用針對單一工況的約束條件應用方法,那么只是簡單地將多個工況進行拼接,拼接后的工況還是可以看作為一種單一工況,這樣最終參數優化依然是針對單一工況進行的,因此需要根據復合工況的特點改變約束條件的應用方法。本文中的約束條件共5個,其中約束條件h1,h2,h3和h4不受行駛工況的影響,只有約束條件h5會受到行駛工況的影響。因此多工況參數優化的約束條件應用方法是:參數優化的結果能使車輛滿足約束條件h1,h2,h3和h4;要求車輛在運行完每個拼接工況后,電池的SOC和運行該拼接工況前的電池SOC差值ΔSOC小于等于0.5%(即約束條件h5),以復合工況W1為例,需要電池的SOC運行完NEDC,CQCYC,NYCC,UDDS,CYC_WVUSUB和HWFET工況前后的差值ΔSOC均小于等于0.5%,即電池SOC在0和1 185s,1 186和2 720s,2 721和3 319s,3 320和4 689s,4 690和6 354s,6 355和7 120s時的差值ΔSOC均小于等于0.5%。這樣才能保證優化參數在應用于構成復合工況W1的各個典型工況時不僅同樣滿足了約束條件,而且整車的燃油經濟性得到了進一步的優化。
4.2 仿真對比分析
6種典型工況一共能夠拼接出720種復合工況,為了簡化計算僅挑選起始拼接工況和最終拼接工況不相同的6種復合工況進行仿真分析。選用的6種復合工況分別為:
B1:(NEDC,CQCYC,NYCC,UDDS,CYC_WVUSUB,HWFET);
B2:(HWFET,CYC_WVUSUB,UDDS,NYCC,CQCYC,NEDC);
B3:(CQCYC,HWFET,NEDC,CYC_WVUSUB,UDDS,NYCC);
B4:(UDDS,NEDC,NYCC,CQCYC,HWFET,CYC_WVUSUB);
B5:(CYC_WVUSUB,HWFET,NYCC,CQCYC,NEDC,UDDS);
B6:(NYCC,UDDS,CYC_WVUSUB,NEDC,HWFET,CQCYC)。
通過選用的6種復合工況對混合動力汽車的動力系統參數和控制策略相關參數進行優化,優化的結果如表6所示。由表可見,通過6種復合工況所得到的優化參數結果在數值上很接近,而這種細微的不同源于遺傳算法本身。取平均值作為最終的優化參數結果,因此得到基于多工況混合動力汽車的參數優化結果:Pe=43.4kW,Pm=36.7kW,Qb=20.5A·h,i0=5.28,vmotor=9.40km/h,ηmax=0.080,ηmin=0.25。
當混合動力汽車的動力系統參數和控制策略相關參數采用復合工況下所得到的優化參數時,各個典型工況對應的電池SOC變化如圖6所示。由圖可見,各個典型工況下的電池SOC變化均能滿足所設的約束條件h5,這反映了基于多工況的混合動力汽車參數優化結果具有更強的適用性。
對于混合動力汽車,針對同一行駛工況和相同的電池SOC初始值,應用不同的動力系統參數和控制策略相關參數,可能得到不同的電池SOC最終值。由于電池的SOC可以轉化為等效燃油消耗量,所以當電池SOC最終值之間的差異較大時,通常情況下不能直接通過油耗來衡量不同優化參數的優劣。只有當電池SOC最終值之間差值轉化來的等效燃油消耗量相對于運行完某個工況后整車所消耗的燃油很小時,才能直接通過油耗衡量不同參數優化結果的優劣。因此需選擇一個行駛距離長、耗油量大的工況作為仿真的測試工況,以此忽略電池SOC最終值差異所帶來的等效燃油消耗量的影響。
本文中將ADVISOR的43種循環工況和實車采集的行駛工況進行拼接,構建一個距離為590km的循環工況Long_CYC,將5個連續重復的Long_CYC工況作為仿真采用的測試工況,Long_CYC工況如圖7所示。
通過仿真比較針對典型工況以及復合工況所得到的優化參數對整車燃油消耗量的影響,所得的對比結果如圖8所示。由圖可見,復合工況、CQCCQ,NEDC,NYCC,UDDS,CYC_SUB和HWFET在運行完測試工況后的油耗分別為102.96,107.97,108.56,110.63,112.10,114.46和119.48L,對應的百公里油耗分別為3.49,3.66,3.68,3.75,3.80,3.88和4.05L。因此采用復合工況進行參數優化結果的百公里油耗比采用6種單一的典型工況優化結果分別降低4.64%,5.16%,6.93%,8.16%,10.5%和14.81%,這反映了采用復合工況得到的優化參數相對于采用單一工況所得的優化參數在提高整車燃油經濟性上具有一定的優勢。
5 結論
(1) 應用遺傳算法和Matlab/Simulink結合搭建的參數優化仿真模型,獲得了多個單一工況所對應的優化參數結果,經比較分析驗證了基于單一工況的混合動力汽車參數優化結果存在可能不適用于其它工況和未必能使整車燃油經濟性達到最優的問題。
(2) 以基于單一工況的混合動力汽車參數優化方法為基礎,通過多個典型工況構建復合工況,再提出約束條件應用于復合工況的方法,從而實現了針對多工況的混合動力汽車參數優化。
(3) 仿真結果表明:基于多工況的混合動力汽車參數優化所得到的優化參數,不僅能夠適用于多種工況,而且能進一步提高整車的燃油經濟性。
[1] 吳光強,陳慧勇.基于遺傳算法的混合動力汽車參數多目標優化[J].汽車工程,2009,31(1):60-64.
[2] GAO Wenzhong, PORANDLA S K. Design optimization of a parallel hybrid electric powertrain[C]. IEEE Conference on Vehicle Power and Propulsion,2005:530 -535.
[3] 伊東安,諶文文,楊亞娟,等.基于遺傳算法的ISG混合動力汽車參數優化[J].汽車工程,2011,33(10):834-837.
[4] 王潤才,何仁,俞劍波,等.基于遺傳算法的插電式串聯混合動力汽車動力參數優化[J].中國機械工程,2013,24(18):2544-2549.
[5] 鄧文娟,謝冰,等.混合動力系統參數優化匹配研究[J].科學技術與工程,2009,9(21):6449-6452.
[6] FANG Lincun, QIN Shiyin, XU Gang, et al. Simultaneous optimization for hybrid electric vehicle parameters based on multi-objective genetic algorithms[J]. Energies,2011,4(3):532-544.
[7] 顏超,連志偉.基于遺傳算法的串聯混合動力汽車參數優化[J].北京汽車,2009(4):10-13.
[8] GURKAYNAK Y, KHALIGH A, EMADI A. Neural adaptive control minimization strategy for hybrid electric vehicles[C]. Processdings of ASME 2010 Dynamic Systems and Control Conference, Cambridge, USA,2010,DSCC2010-4211:1-7.
A Study on the Parameter Optimization of Hybrid ElectricVehicle Based on Multiple Driving Cycles
Zhan Sen, Qin Datong & Zeng Yuping
ChongqingUniversity,StateKeyLaboratoryofMechanicalTransmission,Chongqing400044
In view of the problem that with single driving cycle-based optimization, the optimized parameters of hybrid electric vehicle (HEV) may not suitable for other driving cycles and the fuel consumption of vehicle may not reach its optimum, a parameter optimization scheme for HEV based on multi-driving cycles is proposed in this paper. With minimizing vehicle fuel consumption as objective, four powertrain parameters and three control strategy parameters as optimization variables, an optimization model based on genetic algorithm and Matlab/Simulink module is established, and optimizations for HEV based on both single driving cycle and multi-driving cycles are conducted respectively. The results show that on the premise of ensuring the power performance of vehicle, the results of optimization based on multi-driving cycles can not only suite to various driving conditions but also further improve the fuel economy of vehicle, compared with that of single driving cycle-based optimization.
HEV; parameter optimization; genetic algorithm; multiple driving cycles
*“十二五”國家科技支撐計劃項目(2013BAG12B01)資助。
原稿收到日期為2015年5月26日,修改稿收到日期為2015年8月30日。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26