城市電動公交車制動能量回收控制策略研究*
2016-04-11 07:58:14朱文平孫宇航
汽車工程 2016年3期
郭 棟,朱文平,孫宇航,高 松,楊 坤,李 博
(山東理工大學(xué)交通與車輛工程學(xué)院,淄博 255049)
2016044
城市電動公交車制動能量回收控制策略研究*
郭 棟,朱文平,孫宇航,高 松,楊 坤,李 博
(山東理工大學(xué)交通與車輛工程學(xué)院,淄博 255049)
為有效提高城市電動公交車的制動能量回收率,以某一后輪驅(qū)動的12m城市電動公交車為對象,對簡單并聯(lián)控制策略進行改進,在后軸氣壓管路添加調(diào)壓閥以增加后輪電機制動的比例,進而提高制動能量回收率。在此基礎(chǔ)上,提出了新型并聯(lián)控制策略,并結(jié)合非線性規(guī)劃控制算法,運用Matlab/Simulink軟件進行仿真。結(jié)果表明,采用新型并聯(lián)控制策略時制動能量回收率最高可達28.4%,比采用簡單并聯(lián)控制策略時的回收率約高12個百分點。
電動公交車;制動能量回收;控制策略;非線性規(guī)劃;Matlab/Simulink
前言
目前汽車工業(yè)迅速發(fā)展,隨之帶來的環(huán)境污染和石油資源枯竭問題日益嚴(yán)重[1]。近年來,電動汽車得到迅速的發(fā)展和應(yīng)用,但是續(xù)駛里程短、動力性不足的瓶頸仍然沒能突破[2]。目前,比較成熟的解決辦法是運用制動能量回收技術(shù),對電動汽車制動過程中的能量通過電機進行回收,并運用到二次牽引,提高能量利用率,從而達到延長續(xù)駛里程和提高動力性的目的[3-4]。
制動能量的回收,需要綜合考慮車輛的動力學(xué)特性、電機的發(fā)電特性和動力電池組的充放電特性等因素[5-9]。迄今為止,我國對于電動汽車制動能量回收控制技術(shù)的研究集中于理論仿真驗證,尤其對于城市電動公交車的制動能量回收控制方面的研究剛剛起步。本文中從制動力分配的角度,以后輪驅(qū)動的12m城市電動公交車為例,基于簡單并聯(lián)控制策略的改進,提出了新型并聯(lián)控制策略,并通過建模仿真,驗證了其可行性和實用性。
1 城市電動公交車制動力分配
選擇12m城市電動公交車作為研究對象,忽略空氣阻力和滾動阻力的影響,受力分析如圖1所示。
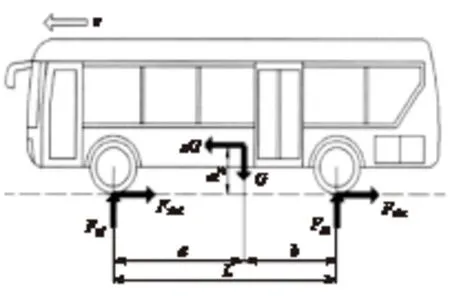
圖1 電動公交車制動受力分析圖
由受力分析可得
(1)
(2)
式中:Fzf和Fzr分別為制動時地面對前輪和后輪的法向反作用力;G為作用在整車上的重力;L為軸距;a和b分別為質(zhì)心與前、后軸的水平投影距離;hg為質(zhì)心高度;z為制動強度。
制動過程中,當(dāng)前后輪同時抱死時,可得
Fxbf+Fxbr=φG
(3)
Fxbf=φFzf
(4)
Fxbr=φFzr
(5)
式中:Fxbf和Fxbr分別為前、后輪地面制動力;φ為路面附著系數(shù)。
聯(lián)立式(3)~式(5)可得
(6)
由式(6)可得電動公交車前后輪制動器制動力的理想分配曲線,即I曲線。當(dāng)前后輪制動器制動力按照I曲線分配時,無論φ為何值,前后輪總是同時抱死,保證制動穩(wěn)定性和較高的路面附著系數(shù)利用率。
對于12m城市電動公交車而言,其前后輪制動器制動力的比值為定值。設(shè)定β為制動力分配系數(shù),則有
(7)
式中:Fuf和Fur為前、后輪制動器制動力;Fu為總制動器制動力。電動公交車的部分整車參數(shù)和β值如表1所示。
2 制動力分配策略選擇
通常情況下,電動汽車制動時,需采用傳統(tǒng)機械摩擦制動和電機制動相結(jié)合的復(fù)合制動模式。而傳統(tǒng)機械摩擦制動力和電機制動力的分配比例,對于制動效能和制動能量回收率具有重要影響[10-12]。
2.1 制動力分配策略選擇
目前相對成熟的制動力分配策略有串聯(lián)控制策略和并聯(lián)控制策略兩種[13-14]。常見的串聯(lián)制動控制策略包括:能量最大化控制策略,感覺最優(yōu)控制策略和模糊邏輯控制策略等。常見的并聯(lián)控制策略包括:簡單并聯(lián)控制策略和異步并聯(lián)控制策略。研究表明,并聯(lián)控制策略具備結(jié)構(gòu)簡單、成本低和制動穩(wěn)定性好等特點,便于大范圍推廣使用,雖然其制動能量回收率較低,但可通過對控制策略的優(yōu)化來提高。
基于典型制動力分配策略,結(jié)合電動公交車的理想制動力分配曲線(I曲線),建立能量回收率較高的新型并聯(lián)制動分配策略。本研究中城市電動公交車為后輪驅(qū)動,為提高制動能量回收率,需對后軸的傳統(tǒng)機械制動力進行限定,使電機盡可能多地參與制動。通過添加壓力調(diào)節(jié)閥控制后輪機械制動管路的壓力,使前后軸機械制動管路的壓力差為定值,且該定值所對應(yīng)的機械制動力數(shù)值剛好等于電機制動力的最大值,使電機最大限度進行制動,從而提高制動能量回收率。
在制動過程中,新型并聯(lián)制動分配策略分為兩種制動模式。
模式1 當(dāng)車輛制動強度較小時,分配給后輪的制動力小于電機所能提供的最大值,則后輪為純電機制動,前輪為傳統(tǒng)機械制動。前、后輪制動力分配盡可能接近β線。
模式2 當(dāng)車輛制動強度較大時,分配給后輪的制動力遠大于電機所能提供的最大值,其差值由后輪的傳統(tǒng)機械制動系統(tǒng)補償,后輪為電機制動和傳統(tǒng)機械制動共同作用,前輪為傳統(tǒng)機械制動。前、后輪制動力分配盡可能接近β線。
2.2 再生制動控制策略的選擇
基于新型并聯(lián)制動力分配策略,在保證制動穩(wěn)定性和安全性的前提下,提出以下幾點控制策略。
(1) 當(dāng)制動強度較小時(z≤0.1),前后輪制動力按照理想制動力分配曲線分配。后輪所需制動力全部由電機制動提供,前輪所需制動力由傳統(tǒng)機械制動提供。
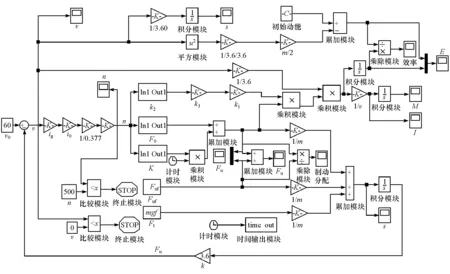
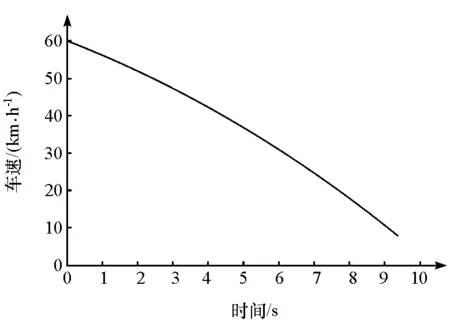
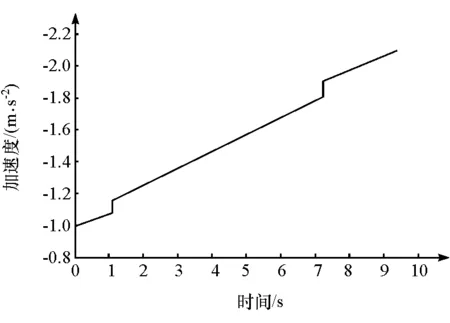
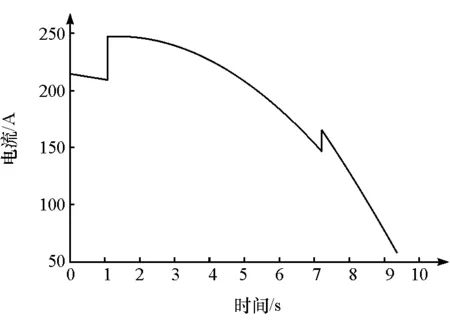
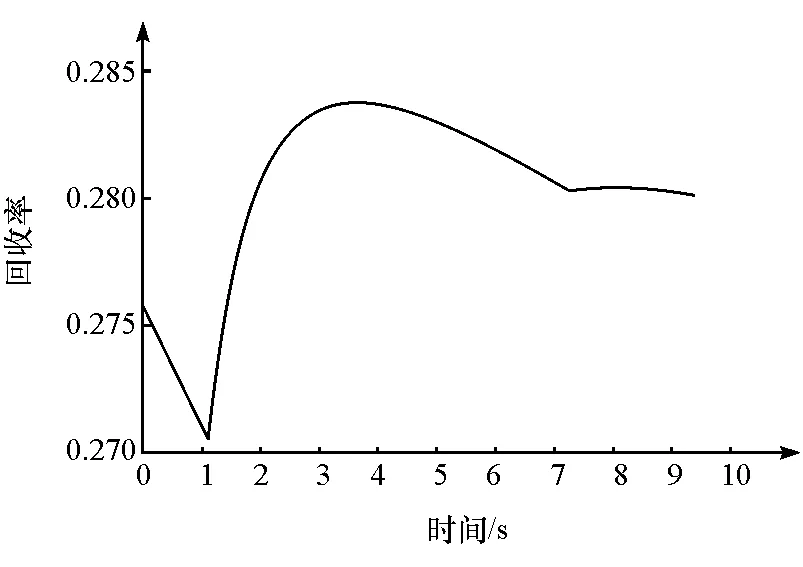
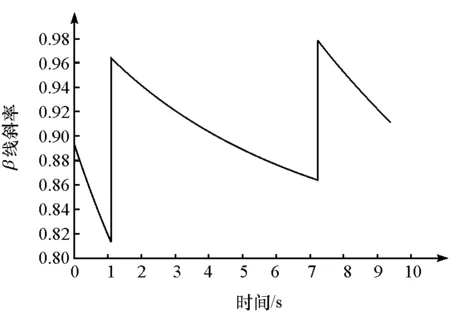
(2) 當(dāng)制動強度中等時(0.1 (3) 當(dāng)制動強度較大時(z>0.7),為緊急制動,防抱死制動控制系統(tǒng)ABS開始介入制動過程。為保證ABS正常工作和制動安全性,停止電機制動,前后輪制動力全部由傳統(tǒng)機械制動提供。 (4) 當(dāng)電池SOC>0.9時,為保護蓄電池的安全,停止電機制動,前后輪制動力全部由傳統(tǒng)機械制動提供。 (5) 當(dāng)電機的轉(zhuǎn)速過低時(一般低于500r/min),由于電機制動效果不明顯,取消電機制動,前后輪制動力全部由傳統(tǒng)機械制動提供。 運用Matlab/Simulink仿真軟件,采用后向仿真建模方法,基于非線性規(guī)劃的控制算法,對制動能量回收控制策略進行建模仿真。 3.1 非線性規(guī)劃模型控制算法 基于上述的再生制動控制策略,在滿足制動需求和穩(wěn)定性的前提下,需確定使回收能量達到最大值(用電流對時間的積分表示)的最佳制動力Fu: Fu=Fuf+Fur (8) 為保證制動過程中的車輛穩(wěn)定性,令前后輪制動力之比近似等于垂直載荷之比,可得 (9) (10) 在一般制動過程中,由于制動強度低,后輪制動力需求小于電機所能提供制動力的最大值,為提高制動能量回收率,后輪制動力Fur由電機制動提供,前輪制動力Fuf由機械制動提供。 為保證駕駛員感覺接近正常制動,令電機制動力隨時間呈線性變化,即 Fur=Fum=F0+Kt (11) 式中:Fum為電機制動力;F0為初始電機制動力;K為電機制動力增長系數(shù)。 同理,對于前輪機械制動力,也可令Fuf隨時間呈線性變化,即 Fuf=8000+1100t (12) 由上述分析可知,需確定F0和K值,為此,建立非線性規(guī)劃模型為 (13) 約束條件:8s≤t≤12s;|ab|≤2.5m/s2;K≥0 式中:t為制動時間;ab為制動加速度;v0為制動開始時的初始車速;v1為電機制動結(jié)束時的終止車速;I為再生制動時對蓄電池的充電電流。其中,I可由動力學(xué)模型求得: (14) 式中:k1為系統(tǒng)機械效率;k2為電機的發(fā)電效率;k3為蓄電池的充電效率;m為電動汽車總質(zhì)量;U為蓄電池電壓;Ff為滾動阻力。 通過查閱整車參數(shù),得到k1=0.9,k3=0.82;由于三相異步交流電機在不同轉(zhuǎn)速和轉(zhuǎn)矩下的效率不同,k2,F(xiàn)0和K取值具體分析如下。 3.2 再生制動控制模型的建立與仿真 由于城市電動公交車正常制動過程中,制動強度一般不高,研究選取3個制動過程:中輕度制動,前輪為機械制動,后輪為電機制動。 基于上述理論分析,運用Matlab/Simulink搭建再生制動控制模型進行仿真驗證。模型如圖2所示。 圖2 再生制動仿真模型 當(dāng)電動汽車以初始車速v0=60km/h開始制動時,由上述模型仿真,可以得到車速、制動加速度、蓄電池充電電流、制動能量回收率和β線斜率k隨時間t的變化曲線圖,如圖3~圖7所示。 圖3 車速-時間變化曲線 圖4 制動加速度-時間變化曲線 圖5 充電電流-時間變化曲線 圖6 能量回收率-時間變化曲線 圖7 β線斜率-時間變化曲線 由圖3~圖7仿真結(jié)果可得以下結(jié)論。 (1) 在制動過程中,電動汽車的車速下降比較平緩,沒有突變發(fā)生,符合制動穩(wěn)定性和安全性要求。 (3) 最大充電電流Imax=250A<400A,符合蓄電池的允許充電電流值。 (4) 制動過程回收的能量占制動過程消耗的總機械能的比例有所提升,制動能量回收率處在27.2%≤η≤28.4%,明顯高于簡單并聯(lián)控制策略η=15.4%,提高了控制系統(tǒng)能量的回收率。 (5) 制動過程中,β線斜率為0.81≤k≤0.97,平均值為k=0.89,根據(jù)理論計算可得k=0.82。因此,前后輪制動力分配實際β線貼近理論β線,前后輪制動力分配符合預(yù)期要求,能夠滿足車輛制動穩(wěn)定性和安全性需求。 通過對典型的制動力分配策略進行分析,基于簡單并聯(lián)控制策略的改進優(yōu)化,提出適合我國城市電動公交車的新型并聯(lián)控制策略。根據(jù)上述新型并聯(lián)控制策略,結(jié)合非線性規(guī)劃的控制算法,利用Matlab/Simulnk搭建模型進行仿真。 仿真結(jié)果表明,運用新型并聯(lián)控制策略,前后輪制動力分配接近β線,滿足制動安全性和穩(wěn)定性要求,制動能量回收率可達到28.4%,在簡單并聯(lián)控制策略的基礎(chǔ)上提升了約12個百分點,證明提出新型并聯(lián)控制策略的合理性和可行性。 [1] 陳清泉.可持續(xù)道路交通的挑戰(zhàn):電動汽車、混合動力汽車和燃料電池汽車的技術(shù)路線和產(chǎn)業(yè)化路線[J].機械制造與自動化,2009,38(2):8-11. [2] 曹秉剛,張偉偉,白志峰,等.電動汽車技術(shù)進展和發(fā)展趨勢[J].西安交通大學(xué)學(xué)報,2004,38(1):1-5. [3] 郭春林,甄子健,武力,等.電動汽車發(fā)展前景與關(guān)鍵因素分析[J].汽車工程,2012,34(9):852-858. [4] ZOU Z Y, CHEN R W, YANG X M, et al. Study on Braking Energy Regeneration System for City Bus[J]. International Journal of Plant Engineering and Management,2011,16(3):150-156. [5] 余志生.汽車?yán)碚揫M].北京:機械工業(yè)出版社,2009. [6] 彭金雷.純電動汽車整車控制策略研究[D].廣州:華南理工大學(xué),2013. [7] ZHANG J Z, LV C, QIU M Z, et al. Braking Energy Regeneration Control of a Fuel Cell Hybrid Electric Bus[J]. Energy Conversion and Management,2013,76:1117-1124. [8] 仇斌.電動城市公交車制動能量回收過程中的能量效率研究[D].北京:清華大學(xué),2011. [9] 張亞軍,楊盼盼.純電動汽車再生制動系統(tǒng)的建模與仿真[J].武漢理工大學(xué)學(xué)報,2010,32(15):90-94. [10] 孫大許,蘭鳳崇,陳吉清.基于I線制動力分配的四驅(qū)純電動汽車制動能量回收策略的研究[J].汽車工程,2013,35(12):1057-1061. [11] TIE S F, TAN C W. A Review of Energy Sources and Energy Management System in Electric Vehicles[J]. Renewable and Sustainable Energy Reviews,2013,20(4):82-102. [12] YAO M F, LIU H F, FENG X. The Development of Low-carbon Vehicles in China[J]. Energy Policy,2011,39(9):5457-5464. [13] 徐海東.電動汽車再生制動能量高效回收控制策略研究[D].濟南:山東大學(xué),2007. [14] LIAN Y F, TIAN Y T, HU L L, et al. A New Braking Force Distribution Strategy for Electric Vehicle Based on Regenerative Braking Strength Continuity[J]. Journal of Central South University,2013,20(12):3481-3489. A Research on Braking Energy Recovery Control Strategy for Electric City Bus Guo Dong, Zhu Wenping, Sun Yuhang, Gao Song, Yang Kun & Li Bo SchoolofTransportationandVehicleEngineering,ShandongUniversityofTechnology,Zibo255049 In order to improve the braking energy recovery rate of electric city buses, a rear-wheel drive 12-meter electric city bus is taken as the object of study and some modifications are made on simple parallel control strategy, including adding a pressure regulating valve in rear axle brake pipeline to increase the proportion of rear wheel motor braking, and hence increase braking energy recovery rate. Then on this basis, a novel parallel control strategy is proposed, and combined with nonlinear programming control algorithm, a simulation is conducted using Matlab/Simulink software. The results show that with the novel parallel control strategy, the braking energy recovery rate can reach up to 28.4%, a 12 percentage point higher than that with simple parallel control strategy. electric bus; braking energy recovery; control strategy; nonlinear programming; Matlab/Simulink *國家863計劃項目(2012AA110305)和山東省自然科學(xué)基金(ZR2014EL036,ZR2015PE020)資助。 原稿收到日期為2014年11月4日,修改稿收到日期為2014年12月30日。3 控制策略的建模與仿真




4 結(jié)論
猜你喜歡
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
