考慮耦合特性的CVT協同控制算法研究*
2016-04-11 10:57:53郝允志孫冬野林毓培
汽車工程 2016年11期
關鍵詞:實驗
郝允志,孫冬野,周 黔,林毓培
(1.西南大學,重慶市智能傳動與控制工程實驗室,重慶 400715; 2. 重慶大學,機械傳動國家重點實驗室,重慶 400030)
2016217
考慮耦合特性的CVT協同控制算法研究*
郝允志1,孫冬野2,周 黔1,林毓培2
(1.西南大學,重慶市智能傳動與控制工程實驗室,重慶 400715; 2. 重慶大學,機械傳動國家重點實驗室,重慶 400030)
根據CVT速比控制和夾緊力控制之間的耦合特性,在需要快速調節速比的瞬態工況,通過暫時適當增大夾緊力的方法來提高速比變化率。利用實驗獲得的穩態速比控制表和速比變化率經驗公式,采用開環-閉環復合控制模型設計了速比、速比變化率和夾緊力的協同控制算法。實驗結果表明,協同控制算法在保證夾緊力可靠性和各工況速比控制性能一致性的前提下,使速比調節時間縮短20%~40%。
無級變速器;速比;夾緊力;耦合特性;協同控制
前言
目前量產的無級變速器(continuously variable transmissions,CVT)主要采用主-從式液壓回路結構,速比控制與夾緊力控制之間具有耦合特性[1-3],為控制算法設計帶來困難。現有的控制方法將夾緊力和速比進行獨立控制或者解耦控制[4-5],其原因是為了簡化控制算法的設計或降低耦合特性的影響。
常規控制方法僅通過調節主動輪油缸壓力來控制速比,不能充分發揮液壓系統的工作潛力,利用耦合特性,協同控制速比和夾緊力可有效提高速比響應性能和夾緊力的可靠性[6-7]。協同控制方法已在一些新型CVT中得到應用,如日產新一代XTRONIC型 CVT,提高了30%的速比響應速度,但目前國內外在這方面的研究報道很少。本文中在耦合特性實驗研究的基礎上,設計速比和夾緊力協同控制算法,在保證夾緊力可靠性和各工況速比控制性能一致性的前提下,大幅提高了速比動態響應性能。
1 夾緊力與速比之間的耦合特性
耦合特性對速比控制的影響包括穩態速比和瞬態速比變化率兩個方面,這里直接采用臺架實驗的方式進行測試。實驗對象為富士重工C075型CVT,采用主-從式液壓回路結構,變速機構的速比變化范圍為0.442~2.432。傳動實驗臺的驅動和加載設備均采用變頻電機,可實現恒轉速和恒轉矩控制。常規速比和速比變化率特性實驗均需要測量主動輪壓力[8-10],而現有量產的CVT都沒有主動輪壓力傳感器,因此這里采用速比控制量(速比電磁閥的占空比控制量)代替,這與實車控制方法相同,測量結果可以直接用于控制算法的設計[4]。
1.1 夾緊力對穩態速比的影響
穩態速比取決于速比控制量(對應于主動輪壓力)和夾緊力(對應于從動輪壓力),測量不同夾緊力下穩態速比隨速比控制量的變化,繪制了穩態速比特性圖[4],如圖1所示。

圖1 穩態速比特性圖
穩態速比特性圖主要有兩個特點:① 從單條曲線的形狀看,具有明顯的非線性,當速比在1.0附近時,速比控制量的變化對速比的影響較小,當速比偏離1.0時,速比控制量的微小變化都會引起穩態速比的大幅變化,由于速比增大和速比減小過程存在速比控制量回滯,因此實際速比和速比控制量必然存在波動;② 從各條曲線的相對位置看,速比控制量的有效范圍僅為10%~15%,有效范圍隨夾緊力的增大而增大,并且向左移動,當速比控制量相同時,夾緊力越大則穩態速比越大。
1.2 夾緊力對速比變化率的影響
速比變化率主要取決于速比、速比控制量和夾緊力。圖2為不同夾緊力條件下,速比控制量在0和100%之間階躍變化時的速比變化過程實驗結果,主要有兩個特點:① 速比變化率隨夾緊力的增大而提高,例如夾緊力為3MPa時的速比變化時間比夾緊力為1MPa時縮短了約40%;② 速比增大時的速比變化率大于速比減小時的速比變化率,例如夾緊力為1MPa時,速比增大的時間比速比減小的時間縮短23%。
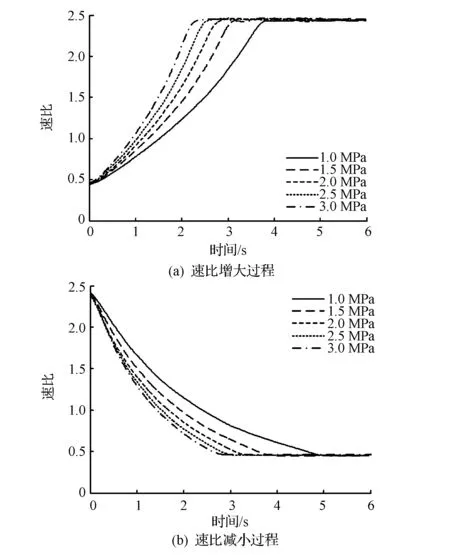
圖2 不同夾緊力下的速比變化過程
測試不同速比控制量和夾緊力下的速比變化過程,根據實驗結果整理出速比變化率經驗公式如式(1)所示,該式采用速比控制量代替常規速比變化率中的主動輪壓力信號[4, 8-10]。
(1)
式中:Ps為夾緊力;Dp為速比控制量;Kip為速比變化率比例系數;Kid為速比變化率偏移量。Kip和Kid由夾緊力和速比控制量決定。
在實際的速比控制中更關心最大速比變化率,因為計算速比變化率需要對速比進行差分運算,而差分運算對轉速測量誤差比較敏感,造成實時速比變化率的計算精度難以保證,因此直接對速比變化率進行閉環控制的精度較低。根據式(1)可知,速比增大和速比減小時的最大速比變化率分別為
(2)
(3)
實驗結果表明,Kip(Ps,1),Kid(Ps,1),Kip(Ps,0)和Kid(Ps,0)近似為Ps的線性函數,因此式(2)和式(3)可分別改寫為
(4)
(5)
根據實驗結果對式(4)和式(5)進行擬合,得到
0.0053Ps+0.207
(6)
0.0477Ps+0.187
(7)
2 考慮耦合特性的速比控制算法
2.1 常規速比控制算法存在的問題
(1)沒有充分利用耦合特性來提高控制性能。包括兩個方面:① 實驗表明,采用PID控制算法雖能實現目標速比的跟蹤控制,但速比控制量大幅波動,速比電磁閥動作頻繁,不利于電磁閥的壽命,因為常規控制算法只根據誤差來計算控制量,沒有考慮夾緊力、實際速比等對速比響應特性的影響,并且速比響應特性具有明顯的非線性特征,在本質上決定了其控制性能難以在各工況下均獲得滿意效果;② 新型量產CVT利用耦合特性對速比和夾緊力進行協調控制,顯著提高了速比響應性能,而常規控制方法僅通過調節主動輪油缸壓力來控制速比,沒有充分發揮液壓系統的工作能力[4,6]。
(2)沒有考慮耦合特性可能會造成的夾緊力可靠性問題。實驗表明,由于耦合特性,速比控制量的變化會造成夾緊力的波動,在低速重載工況下甚至會引起金屬帶打滑,降低控制性能和變速機構的可靠性,因此在速比控制中必須考慮耦合特性造成的夾緊力波動問題。
(3)速比和速比變化率的協同控制不足。速比變化率對車輛性能的影響包括兩個方面:① 從經濟性和動力性方面考慮,提高速比變化率能夠縮短速比調節時間,使發動機更好地沿最佳經濟線或最佳動力線等設定工作線運行;② 從舒適性方面考慮,希望限制速比變化率,防止造成車輛頓挫或前沖而影響舒適性,例如CVT車輛急加速過程中的動力疲軟問題[11-12]。
2.2 開環-閉環復合控制模型
為彌補常規控制算法的不足,利用實驗獲得的穩態速比控制表和速比變化率經驗公式,采用開環-閉環復合控制模型,設計了速比、速比變化率和夾緊力的協同控制算法。對于CVT速比控制這種存在非線性特性且具有實驗數據的被控對象,尤其適合采用復合控制算法,可使控制算法的設計流程化,且簡化控制算法的實驗調試過程。
開環-閉環復合控制模型主要有兩種,如圖3所示。開環控制器可以是實驗獲得的控制表或者經驗公式,其作用是使控制量快速接近最終控制量,減少調節時間。閉環控制器的作用是彌補控制表或者經驗公式的誤差,同時提高控制算法的動態響應。兩種模型的區別在于閉環控制器的位置,圖3(a)中,閉環控制器是修正開環控制器輸出的基本控制量。圖3(b)中,閉環控制器是先將目標值修正,再輸入開環控制器。

圖3 兩種開環-閉環復合控制模型
將被控對象的傳遞函數表示為
Gp(s)=fpsGpd(s)
(8)
式中:fps為被控對象的穩態輸入輸出函數;Gpd(s)為被控對象的動態響應傳遞函數。
開環控制器fcs與被控對象的穩態輸入輸出函數fps為倒數關系,即
fcs=1/fps
(9)
進一步推導出兩種模型的傳遞函數分別為
(10)
(11)
式中:Y(s)為輸出量;R(s)為目標值;Gcd(s)為閉環控制器的傳遞函數。
比較式(10)和式(11),可以看出式(11)中沒有
fps,理論上已經抵消了被控對象的穩態非線性,所以圖3(b)所示模型的控制效果更好。
2.3 考慮耦合特性的協同控制算法設計
根據耦合特性對速比、速比變化率和夾緊力進行協同控制算法的作用是使速比、速比變化率和夾緊力的實際值更好地跟蹤目標值。目標速比、目標速比變化率根據經濟性、動力性、舒適性等控制策略來確定[1,11-12],這里不做論述。
協同控制算法框圖如圖4所示,輸入參數油泵轉速也是發動機轉速。輸出參數為實際測量的夾緊力和速比。夾緊力和速比控制均采用圖3(b)所示的開環-閉環復合控制模型。速比控制是協同控制的關鍵部分。下面重點對速比控制進行闡述。

圖4 速比、速比變化率和夾緊力控制方法框圖
協同控制算法通過增大夾緊力來提高速比變化率,有悖于降低夾緊力以提高傳動效率的常規夾緊力控制目標,因此主要適用于兩種情況:① 在急加速和急減速等瞬態工況,需要傳動比快速變化,此時不再以經濟性為優先目標,因此應增大夾緊力以提高速比動態響應性能;② 提高速比變化率能夠更快地調節發動機轉速以跟蹤最佳經濟性線或最佳動力性線,雖然因為夾緊力的增大而降低了CVT的效率,但是由于發動機的效率或功率提高,傳動系統的整體效率或功率并未下降,甚至有所提高[6]。
2.3.1 根據目標速比變化率修正目標夾緊力
根據1.2節的實驗結果,夾緊力對速比變化率影響顯著,夾緊力越大則速比變化率越大,因此確定目標夾緊力不僅要保證轉矩可靠傳遞,還要滿足目標速比變化率的需要。與此相對應,圖4中也有兩個目標夾緊力計算模塊:第一個是計算滿足轉矩傳動的夾緊力Ps_safe,這屬于常規目標夾緊力計算方法;第二個是計算滿足目標速比變化率要求的夾緊力Ps_dyn,需要考慮速比增大和速比減小兩種情況,當目標速比變化率為正時,根據式(6)可得滿足要求的最小夾緊力為
(12)

當目標速比變化率為負時,根據式(7)可得滿足要求的最小夾緊力為
(13)
取兩個模塊計算結果的較大值作為目標夾緊力Ps_tgt,即
Ps_tgt=max(Ps_safe,Ps_dyn)
(14)
夾緊力控制算法由夾緊力閉環控制算法和夾緊力開環控制表構成,其中閉環控制算法根據實驗獲得的夾緊力閥動態響應特性進行設計,開環控制表根據夾緊力閥的穩態特性進行設計,即穩態夾緊力與油泵轉速和夾緊力控制量的關系,具體設計方法見文獻[7]。
2.3.2 速比開環控制表和速比閉環控制算法
圖4中的速比控制算法采用開環-閉環復合控制算法,設計速比開環控制表和速比閉環控制算法兩個主要模塊。速比開環控制表由圖1所示的穩態速比特性表轉換而來,結果如圖5所示,根據目標速比和夾緊力查二維表得到速比控制量,基本消除穩態速比的非線性對控制性能的影響,有利于保證各工況控制性能的一致性。

圖5 速比開環控制表
速比閉環控制算法如圖6所示,以目標速比作為基本目標值,使控制量快速接近目標控制量,提高控制算法的初始響應速度,PID控制器根據速比誤差計算輸出值來修正目標值,提高控制精度,PID輸出限值根據速比閥的有效占空比控制范圍確定,本文中所述CVT的占空比控制范圍為15%~45%。

圖6 速比閉環控制算法框圖
2.3.3 目標速比和速比控制量的進一步修正
(1)根據目標速比變化率修正目標速比。圖4中有一個模塊為根據目標速比變化率計算目標速比限制值,作用是將目標速比變化率的控制轉換為對目標速比的修正。將實際夾緊力和速比帶入式(1)速比變化率經驗公式可計算出滿足目標速比變化率要求的速比控制量,根據該速比控制量和夾緊力值,查圖1所示的穩態速比特性圖得到穩態速比,并作為目標速比限制值,從而間接限制了速比變化率。
(2)根據速比控制量變化率限制表修正速比控制量。涉及圖4中的速比控制量變化率限制表和修正速比控制量兩個模塊。因為速比控制量的變化會引起夾緊力的波動,為保證夾緊力波動量在安全范圍內,在低速重載工況下需要對速比控制量的變化率進行限制[7]。速比控制量變化率限制表通過實驗獲得,該限值作為速比控制量的最大變化率,防止速比控制量的變化對夾緊力造成影響。
3 實驗
協同控制算法通過對速比變化率的控制將夾緊力控制和速比控制聯系在一起,是否通過提高夾緊力來提高速比響應性能是常規控制和協同控制的主要區別,因此下面分別對是否限制速比變化率兩種工況下的常規夾緊力控制+速比復合控制和完整的協同控制進行比較。
當目標速比變化率超過系統能實現的最大速比變化率時,就等效于不限制速比變化率,也是速比響應最快的工況。實驗條件:初始目標速比和實際速比均穩定在2.0,在1s時,目標速比下降為0.5,在5s時,目標速比階躍至2.0。實驗結果如圖7所示,協同控制算法能夠明顯提高速比控制性能,圖7(a)中,速比下降和上升的時間分別縮短38%和33%,速比調節過程比較平穩,沒有速比超調和振蕩現象,表明速比復合控制算法具有良好的控制性能。圖7(b)中,由于不限制速比變化率,兩種控制方法在目標速比階躍變化時的速比變化率就是兩種方法所能實現的最大速比變化率,分別約為1.3和1.8,協同控制方法使最大速比變化率提高約38%。由圖7(c)中可以看出,在速比調節過程中協同控制算法暫時增大夾緊力以提高速比變化率,在速比調節完成后恢復為常規夾緊力。由于不限制速比變化率,故在速比變化過程中采用最大夾緊力以盡可能提高速比變化率,夾緊力近似于階躍變化。增大夾緊力會增大油泵功率而降低CVT的傳動效率,時間約1.5s。根據CVT的傳動效率實驗結果,增大夾緊力造成的效率下降一般不超過5%。

圖7 不限制速比變化率時的實驗結果
從舒適性和可靠性方面考慮,在實際運行中一般需要對目標速比變化率進行限制。將目標速比變化率設定為1,結果如圖8所示。由圖可見,雖然限制了速比變化率,協同控制算法仍然使速比下降和上升的時間分別縮短31%和23%。在目標速比變化后的初始階段,常規夾緊力暫時可以滿足目標速比變化率的要求,此時協同控制算法也采用常規夾緊力。當常規夾緊力不能滿足目標速比變化率的要求時,則協同控制算法逐漸提高夾緊力,盡可能滿足目標速比變化率,當速比調節結束時再恢復為常規夾緊力。由于限制了速比變化率,控制算法根據目標速比變化率來計算合適的夾緊力,而不一定采用最大的夾緊力,如圖8(c)所示,當目標速比增大和減小時,夾緊力沒有發生階躍變化。

圖8 目標速比變化率=1時的實驗結果
4 結論
(1) 實驗研究了在夾緊力對穩態速比和瞬態速比變化率的影響,提出在需要快速調節速比的瞬態工況,利用耦合特性暫時增大夾緊力可有效縮短速比調節時間。
(2) 設計了速比、速比變化率和夾緊力的協同控制算法。結果表明,該算法在保證夾緊力可靠性和速比控制性能的前提下,使速比調節時間縮短20%~40%。
[1]MEULENSVD,IPERENRV,JAGERBD,etal.Avalidatedmodularmodelforhydraulicactuationinapushbeltcontinuouslyvariabletransmission[J].TransactionsoftheASME,JournalofDynamicSystems,MeasurementandControl, 2011, 133(7): 041004.
[2]SRIVASTAVAN,HAQUEI.Areviewonbeltandchaincontinuouslyvariabletransmissions(CVT):dynamicsandcontrol[J].MechanismandMachineTheory, 2009, 44: 19-41.
[3] 張樹培, 張友坤, 盧延輝. 金屬帶式無級變速器耦合現象及影響因素研究[J]. 機械傳動, 2014, 39(2): 30-34.
[4] 郝允志, 孫冬野, 林毓培, 等.CVT速比響應特性的實驗研究及其應用[J]. 汽車工程, 2014, 36(7): 879-884,861.
[5]MAMALAJ,JANTOSJ.ShiftspeedcontrolinCVTpowertrain[J].InternationalJournalofVehicleDesign, 2010, 54(1): 26-34.
[6] 郝允志, 孫冬野, 秦大同,等. 基于主動耦合干預的無級變速器速比控制[J]. 中國機械工程, 2012, 23(3): 315-319.
[7] 郝允志, 孫冬野, 林毓培. 無級變速器夾緊力控制方法的可靠性[J]. 中國機械工程, 2014, 25(12): 1687-1693.
[8] 胡建軍, 秦大同, 劉振軍. 金屬帶式無級變速傳動速比變化特性研究[J]. 汽車工程, 2003, 25(1): 25-29.
[9]GAUTHIERJP,MICHEAUP.AmodelbasedonexperimentaldataforhighspeedsteelbeltCVT[J].MechanismandMachineTheory, 2010, 45: 1733-1744.
[10]CARBONEG,MANGIALARDIL,BONSENB,etal.CVTdynamics:theoryandexperiments[J].MechanismandMachineTheory, 2007, 42: 409-428.
[11] 郝允志, 孫冬野, 秦大同,等. 瞬態工況下無級變速車輛的功率補償控制[J]. 湖南大學學報(自然科學版), 2011, 39(9): 44-49.
[12]CENTENOG,MORALESF,PEREZFB.Continuouslyvariabletransmissionwithaninertia-regulatingsystem[J].TransactionsoftheASME,JournalofMechanicalDesign, 2010, 132(5): 510-524.
A Study on CVT Cooperative Control Algorithm with Consideration of Coupling Characteristics
Hao Yunzhi1, Sun Dongye2, Zhou Qian1& Lin Yupei2
1.SouthwestUniversity,ChongqingEngineeringLaboratoryofIntelligentTransmissionandControl,Chongqing400715;2.ChongqingUniversity,StateKeyLaboratoryofMechanicalTransmission,Chongqing400030
According to the coupling characteristics between the speed ratio control and clamping-force control of a continuously variable transmission, the ratio changing rate is raised by temporarily increasing clamping-force under the transient conditions when rapidly adjusting ratio is required. Base on the control table of steady ratio and the empirical formulas of ratio changing rate, a cooperative control algorithm for speed ratio, ratio changing rate and clamping-force is worked out by using an open loop/closed loop compound control model. Experimental results show that with cooperative control algorithm, the ratio adjusting time is shortened by 20%~40% while ensuring the reliability of clamping force and the consistency of ratio control performance in different working conditions.
continuously variable transmission; speed ratio; clamping force; coupling characteristics; cooperative control
*中央高校基本科研業務費(XDJK2014B046和SWU112005)資助。
原稿收到日期為2015年8月28日,修改稿收到日期為2015年11月19日。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
