牽引供電故障跳閘智能分析系統的研究
2016-03-28 03:35:28陳進根上海鐵路局杭州供電段
上海鐵道增刊 2016年4期
陳進根 上海鐵路局杭州供電段
牽引供電故障跳閘智能分析系統的研究
陳進根 上海鐵路局杭州供電段
牽引供電系統是電氣化鐵路的重要組成部分,是電力機車、動車組動力來源的唯一途徑,接觸網是牽引供電系統中唯一沒有備用的關鍵供電設備,接觸網的運行安全尤為重要,一旦故障,將會嚴重影響運輸安全。對直接供電末端并聯和AT供電兩種方式下的故障測距及饋線保護現狀進行研究,闡述以饋線故障跳閘保護報文及測距報文經驗解析的優勢,提出牽引供電故障跳閘智能分析系統解決方案,為故障跳閘的分析提供幫助。
電氣化鐵路;故障跳閘;智能分析
1 引言
接觸網線路故障可分為永久故障和瞬時故障兩種類型,接觸網故障10%為永久性故障。瞬時故障通過一次重合閘可恢復供電,但需盡快找到故障點,消除影響牽引供電的安全穩定運行的隱患。若為永久性故障,需要迅速查明故障原因并及時排除,排除故障所用時間的長短,將直接影響到鐵路運輸安全與效益。時間越長,停電所造成的經濟損失越大。因此,獲知準確的故障位置、類型和方向,對線路的及時修復和供電的可靠性至關重要,對鐵路安全運輸和經濟運行起到了非常重要的作用。
對于直接供電末端并聯方式,目前綜自廠家都采用微機饋線保護裝置自帶的線性電抗法測距原理進行測距分析,線路理論單位電抗的準確性、不同區間的單位電抗差異性、全并聯線路解列前后互阻抗的影響,都對故障測距精度產生影響。
對于AT供電方式,綜自廠家一般采用吸上電流比測距原理進行測距分析。當線路發生故障時,AT所、分區所、變電所內的故障測距裝置同步采集線路吸上電流分部情況,并將數據送至變電所內故障測距裝置進行計算,給出故障類型、故障距離、公里標等相關信息。延線故障測距通道的好壞、GPS對時的精度、AT漏抗的影響,都對故障測距精度產生影響。
為此,本文以饋線故障跳閘保護報文及測距報文經驗解析方法為研究對象,提出牽引供電故障跳閘智能分析系統概論及解決方案,具有一定設計推廣和實際工程應用價值。
2 牽引供電系統幾種常見饋線保護動作判據和故障測距原理
2.1 電流速斷保護及過流保護
(1)電流速斷保護動作判據為:
①饋線電流大于速斷電流定值;
②持續時間大于速斷動作時間。
(2)過電流保護動作判據為:
①饋線電流大于電流定值;
②持續時間大于電流動作時間;
③二次諧波閉鎖元件未動作;
④當選擇低電壓啟動時還要求母線電壓低于啟動電壓。
2.2 阻抗保護(距離保護)
阻抗保護的動作判據:
①PT斷線閉鎖保護元件未動作;
②二次諧波閉鎖元件未動作;
③阻抗在相應的動作區內;
④時間延時大于阻抗時間定值。
2.3 高阻接地保護(電流增量保護)
牽引網發生高阻接地故障時,阻抗值比常規故障的阻抗值要高出數倍甚至數十倍,阻抗保護將不能正確動作。可利用機車負荷電流的變化量要小于故障電流的變化量的特性來實現保護的,電流增量保護一般也采用諧波抑制的方式來提高保護的躲負荷能力。

式中:I1q,I1h為故障前后兩時刻基波電流;

2.4 故障測距原理
鐵路故障測距裝置一般采用“線性電抗法原理”、“AT中性點吸上電流比原理”、“上下行電流比原理”和“吸饋電流比原理”進行故障測距。
AT中性點吸上電流比原理適用于單線、復線AT牽引供電系統的T-R,F-R,F-PW線路短路故障;上下行電流比原理適用于復線工況下的各種短路故障,但不適用于單線下的故障測距;單線單AT段模式下的故障測距可以采用吸饋電流比原理進行測距。
2.4.1 線性電抗法測距原理
根據接觸網線路電抗與線路長度成正比例關系 l=X
X0
(X:測量電抗;X0:TF型單位電抗),如圖1所示。
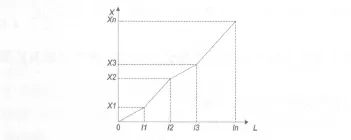
圖1 線路電抗與長度關系圖
2.4.2 上下行電流比測距原理(末端必須并聯,AT供電方式用在第一個AT臂)
當線路末端閉環運行時,采用“上下行電流比測距原理”,故障測距公式如下:
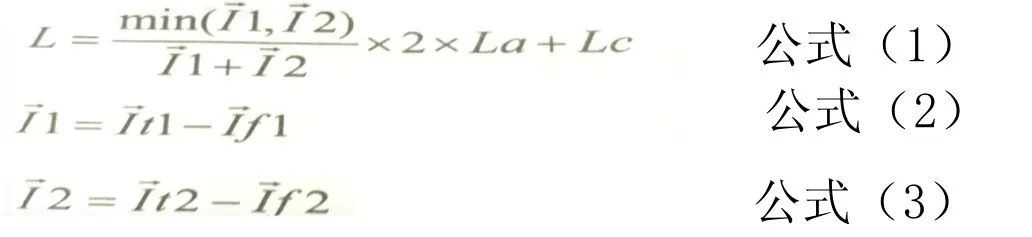
式中: 、 —上下行供電臂電流;La—供電臂長度;Lc—修正距離。
2.4.3 AT中性點吸上電流比原理(AT供電方式)
AT牽引供電系統由于線路短路阻抗值非線性,除T-F短路外其他都不能通過阻抗查表進行故障測距,在通常的TR、F-PW、F-R等短路故障條件下其各AT吸上電流與故障點有比例關系,且故障段AT吸上電流最大。
“AT中性點吸上電流比原理”如下,牽引網故障時見圖2。
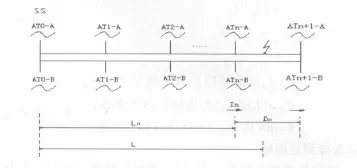
圖2 在第n個AT和第n+1個AT之間發生故障
測距公式

式中:L—故障點距變電所的距離;
Ln—變電所距第n個AT的距離;
Dn—第n個AT與第n+1個AT之間的距離;
In,In+1—分別為第n個AT與第n+1個AT中性點的吸上電流和;Qn,Qn+1—整定值,與鋼軌漏抗等相關;經驗值5~10;Kn,Kn+1—電流分布系數,范圍根據站場情況可調整。對標準區間線路K=1.0。
3 解決方案
本方案將國電南自、天津凱發等綜合自動化廠家故障調整報文導入智能分析系統后,通過系統分析,自動生成故障電流分布圖、故障類型、故障公里標、測距誤差、微機保護動作的準確性等信息,經檢修、運行部門豐富分析意見后提交業務歸口審核、確認并歸檔。智能分析系統實現了跳閘分析的快速化、流程化、標準化,降低了傳統數據分析的人工量及人為因素對分析結果的干擾。各級領導可以第一時間得知故障情況,啟動最佳應急指揮方案,提高了供電可靠性。系統架構見圖3。
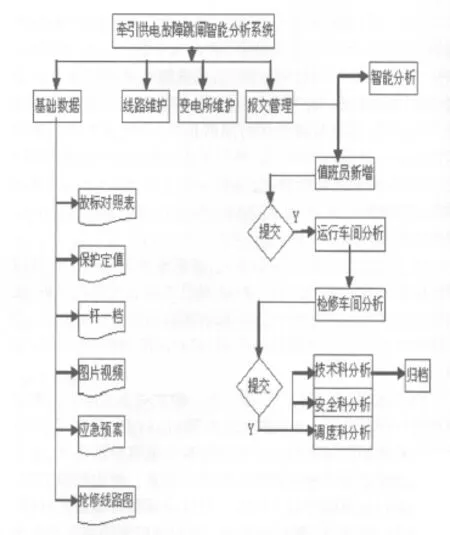
圖3 智能系統架構圖
3.1 故障報文解析
根據各個綜自廠家特點分別獲取饋線保護報文和故障測距報文,采用多種分析模板自動形成特定格式。
3.1.1 自動形成的保護報文格式(見圖4)
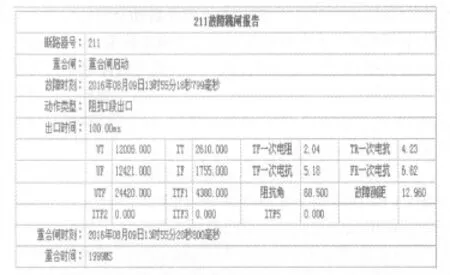
圖4 保護報文格式
3.1.2 自動形成的測距報文格式(見圖5)
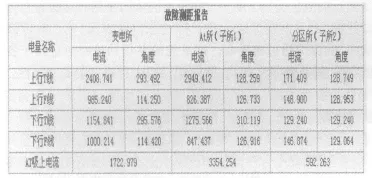
圖5 測距報文格式
從圖4、圖5,可以看出,經過系統的智能分析,將雜亂、無序、難讀的報文智能地解析成了可讀性高、簡單易懂的各類分析報告,并通過相關計算,得到了電流方向、故障點位置、故障點距離、實際距離、誤差等信息。
3.2 故障智能分析
3.2.1 保護動作的正確性分析
根據各種饋線保護報文的故障動作類型,按照對應故障判別依據與整定定值進行計算分析,如果滿足條件,則本次動作正確,否則屬于誤動,見圖6。
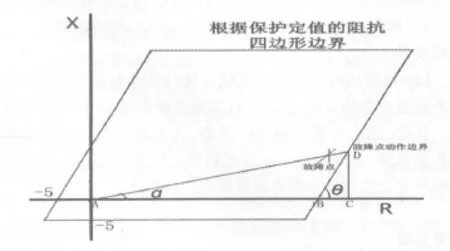
圖6 阻抗四邊形動作圖
(1)阻抗保護動作的正確性分析
AB之間的長度用LAB表示,同理BC之間的長度為LBC, CD之間的長度為LCD,AD之間的長度為LAD,則:

動作臨界邊界(臨界阻抗)LAD=LAC/COSα
Z=U/I
Z (2)速斷保護故障智能分析 只判斷一個條件:大于電流定值,則動作正確,否則為誤動。根據不同廠家需要換算一次電流值:電流I1=流互變比× I2 (3)過流保護故障智能分析 有低電壓閉鎖的同時判斷兩個條件:同時滿足大于電流定值和小于電壓定值。 根據不同廠家需要換算電流和電壓值:電流I1=流互變比×I2;電壓U1=壓互變比×U2。 (4)電流增量保護故障智能分析 如:高阻1段電流定值ΔIdz為650 A(流互變比假如為1 000,定值則為0.65),延時時間定值為2 s。 舉例1:負荷→故障。當饋線負荷電流一直為400 A,即高阻1段故障判斷中I1q0為400 A,則故障電流(假設不含諧波含量)要為400+650=1 050 A以上且持續2 s高阻1段保護才會動作。 舉例2:負荷→負荷。當饋線開始電流為0,即高阻1段故障判斷中I1q0為0 A,機車啟動電流綜合諧波含量K235達到20%,則 即在機車啟動電流綜合諧波含量K235達到20%時機車啟動電流要達到1 300 A且保持2 s高阻1段保護才會出口,即諧波含量越高則要求動作電流越大。 3.2.2 測距數據的正確性分析 根據故障測距數據,按照基爾霍夫節點電流定律:通過電路中任一節點或封閉網絡的電流的和為零,即任一節點流進電流等于流出電流,形成故障電流分布,見圖7。 如果因通道、裝置、GPS對時等原因,其中一個所的故障數據丟失,根據上述原理,也可以推導出整個供電臂的電流分布圖,并選擇相應測距算法進行計算,并在故障對照表內找到相應公里標和支柱號,見圖8。 圖8 故障公里標對照表 在現場找到實際故障點位置,并輸入對應公里標,則自動生成實際故障點公里數及相應誤差。按照歷年故障測距誤差,自動調正測距距離,為查找實際故障點提供更準確的數據。 3.3 快速查閱技術資料 根據故障點位置,自動連接“一桿一檔”資料及周遍照片圖或視頻等技術資料,連接應急處置預案及搶修線路圖,調取現場設備廠家信息及產品名稱及相關信息等資料,為應急處置提供相關信息。 電氣化鐵路牽引供電設備廠家多、設備結構復雜,對于掌握設備性能難度高,及時切除故障并啟動合理的應急供電預案更難實現。本文利用現有的綜自報文數據,通過局域網絡導入數據,智能分析數據,極大地提高了故障跳閘時對于故障點實際距離查找的準確性,從而可以啟動最佳應急供電預案,迅速切除故障,提高供電可靠性、減少故障時間,確保鐵路運輸安全。 為保證供電可靠性,減少故障影響,根據設備、線路的差異建立一套由基礎參數、視頻系統、故障信息、應急供電預案等組成的電氣化鐵路牽引供電故障跳閘智能分析系統勢在必行,該系統的應用不僅能全面掌握全線牽引供電設備運行狀況,了解設備性能,而且一旦出現故障、能及時掌握故障點的位置,自動傳輸故障點現象,并且自動模擬切除故障點,恢復運行的應急指揮方案。這樣不但能實時了解和掌握管轄設備狀況,而且能迅速啟動最佳的應急供電方案,縮小故障影響面,確保優質可靠供電。該系統的各項功能特點適用于各供電段,轉化前景廣闊,在鐵路同行業中具有一定的通用性。 [1]楊正理.電力系統繼電保護原理及應用.機械工業出版社,2010. [2]劉學軍.繼電保護原理.中國電力,2007. [3]中國鐵路總公司.鐵路技術管理規程*高速鐵路部分(32開).中國鐵道出版社,2014. [4]高仕斌,王偉.電力牽引AT供電網復故障及特殊運行方式下故障測距原理[J].電力自動化設備,1991. [5]陳鐵剛.牽引網故障測距算法的研究[J].中國鐵道出版社,1995. [6]WGB-65U微機故障測距裝置說明書[M].國電南京自動化股份有限公司,2015. 責任編輯:許耀元 來稿日期:2016-12-13
4 結論
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50
