探討利用無人機影像測制1∶1萬3D產品
2016-03-08 05:13:23朱建華武利峰王歷明
甘肅科技 2016年2期
朱建華,李 磊,武 堅,武利峰,王歷明
(61243部隊,甘肅蘭州730020)
?
探討利用無人機影像測制1∶1萬3D產品
朱建華,李磊,武堅,武利峰,王歷明
(61243部隊,甘肅蘭州730020)
摘要::無人機具有機動性強、獲取數據快和可以低空飛行的特點,以甘肅某測區為例,介紹其影像數據生產1∶1 萬3D(DEM、DOM、DLG)產品的過程,探討了成果精度,并提出了改進建議。
關鍵詞:無人機;3D產品;成果精度
1 概述
無人飛行器低空遙感系統(Unmanned Aerial Vehicle Low Altitude Remote Sensing System,UAVRS)是以無人機為攝影平臺[1],以CCD相機(charge-coupled device camera)為影像數據獲取工具,飛行高度為2000m左右,能夠獲取高分辨率影像的航空攝影測量系統[2]。通常由飛行平臺、成像載體、地面監控、數據處理、綜合保障等部分組成[3],具有低成本、輕便靈活、無需專用機場支持等特點[4]。目前,利用UAVRS所獲得的高分辯率影像能夠取得多種地形圖產品[5]。本文就無人機數據后處理工序的生產與應用,談談對無人機影像作業的思考及建議。
2 試生產應用情況介紹
筆者單位在甘肅某機場進行了多次實飛作業,并對所獲取的影像進行了后續處理。成果為1∶1萬的3D(DEM、DOM、DLG)產品。現以測區試生產為例展開討論。
2.1測區概況及所獲取的影像數據
測區位于甘肅西部,地形由平地過度到山地,平均海拔1300m,平均高差約200m,區內以沙漠、戈壁為主,植被少,有少量建筑物。作業區域的地理情況適用無人機飛行,實飛過程中獲取影像數據為11條航線,288張影像。除小部分影像模糊,個別區域影像旁向重疊度低小于35%外,影像質量總體良好,符合1∶1萬地形圖成圖要求。
2.2攝影測量試生產情況
試生產采用吉威公司編寫的軟件DPS3.0(Digtal Photograppy System),按照攝影測量內外業作業流程,生成三種測繪產品,分別為數字正射影像圖(DOM)、數字高程模型(DEM)、數字線劃圖(DLG)[6-7]。作業總體流程具體如圖1所示。

圖1 無人機影像處理生產作業流程圖
2.3成果精度分析
此次作業利用GPS RTK技術野外實測26個像片控制點數據為基礎,進行區域測量控制平差解算。所取得的空中三角測量和3D產品的成果精度,見表1。
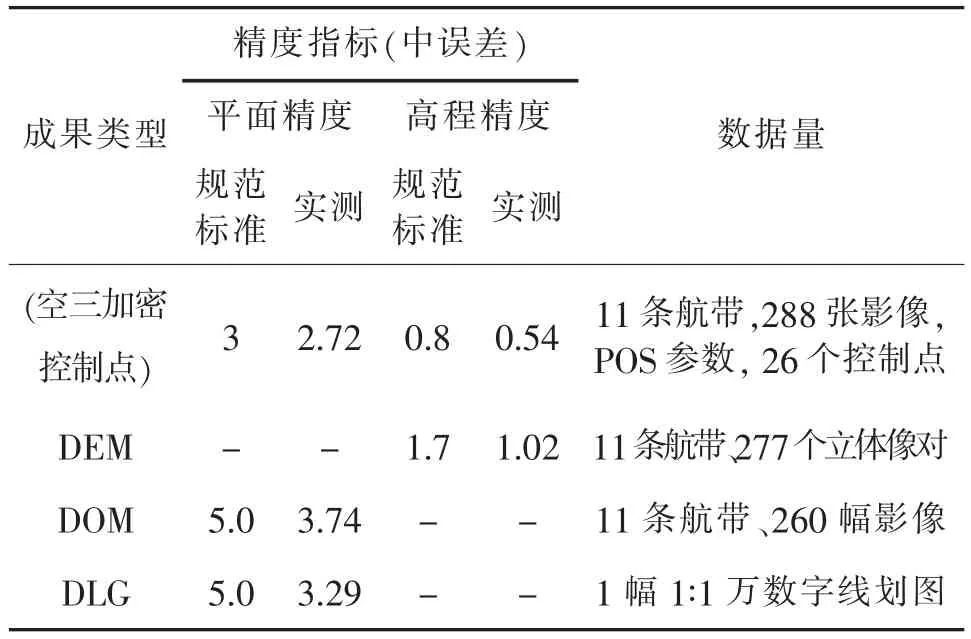
表1 成果精度統計表(單位:m)
根據表1成果精度分析,可以得出:該型無人機測繪系統可以滿足比例尺為1∶1萬測繪產品的生產。
2.4作業情況分析
1)影像前期檢查及處理。由于無人機在空中作業時,受氣流影響較大,造成原始影像變形較大,同時,鑒于無人機空中姿態的原因,個別影像出現模糊情況,給影像前期檢查及處理效率造成一定的困難,較常規航空數字影像處理效率低20%~30%。
2)空中三角測量。在進行空三加密時。利用26個控制點進行控制網平差解算,分為“初始構網、自由網平差、連接點精確匹配、自由網平差、刺點與控制網平差”等步驟。由于軟件采用由粗到細,由少到多,逐步精確的方式進行全自動連接點匹配,完成全自動匹配的連接點不僅數量多,而且分布均勻,有效保證了空三成果精度和穩定性,且該匹配技術對測區形狀、大小、影像質量要求較低。因此,所需的工時比傳統加密方式減少約一半的工作量。
3)數字正射影像和數字高程模型作業。數字高程模型采用“DEM預處理,自動DSM/DEM匹配,DEM合并”等步驟。數字正射影像采用“自動規劃,正射糾正,自動勻光勻色,鑲嵌線自動匹配,鑲嵌成圖”等步驟。從生產過程來看,與航空影像數據處理相比該軟件自動化程度較高,整體效率較高。
4)數字線劃圖作業。由于無人機所搭載的測量型相機像幅過小,為36mm×48mm,致使數據的采集效率低,進度慢。比有人航攝數據采集所需時間多3倍以上(在地貌,地物和作業員熟練情況大致相同時)。后續編輯、入庫、出圖所需工時基本一致。
3 提高無人機測繪系統軟硬件的建議
結合前期作業的實際情況和特點,認為在無人機影像數據在獲取與處理方面可以進行改進,以提高其應用效率和范圍。
1)提高相機像幅,減少像片數量。此型無人機搭載的相機像幅為36mm×48mm,在航高2500m航攝時,某地區100km2區域內需獲取300張左右影像,造成片像數量大,預處理工作量大,影像重疊度大,建議加大相機的像幅,以減少數片數量。
2)穩定無人機空中飛行姿態,確保影像重疊度達到作業標準。由于無人機體積小,抗氣流等能力弱,造成空中姿態變化大,在飛機平穩狀態下航帶間偏移量較大,容易產生航攝漏洞。同一條航帶高差最大80m,平均40m左右。同時兩條相鄰間航帶由于風速和風向的原因,造成影像航向、旁向重疊度不夠,利用常規作業軟件基本無法完成后續空三測量計算等作業。因此飛行作業前期的準備工作要充分、細致,將不利氣候條件影響降到最小。
3)提高無人機POS參數(定位定向參數)精度。現無人機所搭載的相機POS參數是利用GPS(全球定位系統)與IMU(慣性測量裝置)相結合的方式確定,由于IMU參數精度不高,造成定位參數誤差過大。在飛行穩定的情況下,成果影像最大平面誤差約為40m左右,平均誤差25m左右。飛機受氣象因素干擾時,會出現誤差過大,無法解算POS數據。建議采用精度高的POS系統。
4)提高空中數據傳輸速度以方便影像實時檢查。由于影像數據量過大,航拍數據不能實時傳輸下載至數據處理單元,有一定的時間延遲。造成不能實時人工檢查影像質量,不能及時發現航攝漏洞及其他影像質量問題,造成飛行成果生成滯后。建議加大數據傳輸流量與速率。
4 小結
對于無人機數據處理功能的拓展,主要是受無人機硬件技術上的不足所影響,難以在短期內解決。特別是無人機由于體積小,自重輕,空中抗干擾能力差這一先天不足對獲取影像造成的影響是前期無法解決的。這些都對后續處理提出了更高的要求。
參考文獻:
[1]張強.低空無人直升機航空攝影系統的設計與實現[D].鄭州:信息工程大學,2007.
[2]何敬.無人機影像制作大比例尺地形圖實驗分析[D].北京:測繪通報,2009(8):24-27.
[3]楊愛琳,孫汝岳,徐開明.基于固定翼無人機航攝影像獲取及應用探討.測繪與空間地理信息,2010,33(5):45-48.
[4]李金火,張其康,陳碧興.大比例尺航測成圖的航攝比例尺探討[J].地礦測繪,2002,18(2):28-29.
[5]湯國安.遙感數字圖像處理[M].北京:科學出版社,2004: 60-80.
[6]李德仁.攝影測量與遙感概論[M].武漢:測繪出版社, 2001:151-169.
[7] TOUTIN T,CHENIER R.GCP.Requirement For High-res olution Satellite Mapping[J].International Archives of Fho togrammetry.Remote Sensing and Spatial Information Sci ence,2004,35(3):836-839.
中圖分類號:P318.63
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21