基于模糊PID控制的碳纖維角聯(lián)織機(jī)送經(jīng)系統(tǒng)的紗線張力控制
2016-02-08 07:37:42劉國輝蔣秀明1薇1行超騎
紡織報(bào)告 2016年12期
劉國輝,蔣秀明1,,劉 薇1,*,行超騎
(1 天津市現(xiàn)代機(jī)電裝備技術(shù)重點(diǎn)實(shí)驗(yàn)室,天津 300387;2 天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300387)
基于模糊PID控制的碳纖維角聯(lián)織機(jī)送經(jīng)系統(tǒng)的紗線張力控制
劉國輝2,蔣秀明1,2,劉 薇1,2*,行超騎2
(1 天津市現(xiàn)代機(jī)電裝備技術(shù)重點(diǎn)實(shí)驗(yàn)室,天津 300387;2 天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300387)
張力控制時(shí)碳纖維角聯(lián)織機(jī)控制系統(tǒng)的核心,而作為織機(jī)五大機(jī)構(gòu)的送經(jīng)系統(tǒng),是織機(jī)張力控制的關(guān)鍵部分,為了彌補(bǔ)普通控制方法在張力控制中的不足,本文在建立了送經(jīng)系統(tǒng)的模型的基礎(chǔ)上,提出了一種基于模糊控制器的PID的控制策略。在MATLAB中通過對模糊PID與傳統(tǒng)PID控制的仿真對比表明,本文提出的模糊PID的控制方案與傳統(tǒng)PID相比具有超調(diào)量小,響應(yīng)迅速的優(yōu)點(diǎn),更適用于對碳纖維角聯(lián)織機(jī)張力的控制。
送經(jīng)系統(tǒng);張力控制;模糊PID;碳纖維角聯(lián)織機(jī);動(dòng)力學(xué)建模
0 引言
碳纖維角聯(lián)織機(jī)是一種用于織造碳纖維織物的新型織機(jī),碳纖維織物作為碳纖維復(fù)合材料的主要成分,其織物性能直接影響碳纖維復(fù)合材料的性能,而織物織造過程中的張力控制又直接決定織物質(zhì)量的優(yōu)劣,因此控制碳纖維紗線的張力具有重要的研究意義。
1 送經(jīng)系統(tǒng)
在碳纖維多層角聯(lián)織機(jī)中,送經(jīng)機(jī)構(gòu)的作用是為開口運(yùn)動(dòng)提供所需的經(jīng)紗,并保證紗線張力的恒定的存儲量,使紗線張力保持在上機(jī)張力允許的波動(dòng)范圍之內(nèi),從而降低碳纖維的磨損和斷紗的產(chǎn)生,送經(jīng)機(jī)構(gòu)作為織機(jī)的五大核心機(jī)構(gòu)之一,是控制紗線張力的重要環(huán)節(jié)。
碳纖維送經(jīng)系統(tǒng)是由送經(jīng)部件、張力部件和攏紗部件三大部件組成,紗線依次經(jīng)過送經(jīng)部件,張力部件和攏紗部件送往開口系統(tǒng)。
送經(jīng)部件是經(jīng)紗的起點(diǎn)位置,通過控制經(jīng)紗主軸的轉(zhuǎn)速來控制織機(jī)系統(tǒng)中由送經(jīng)機(jī)構(gòu)和卷曲機(jī)構(gòu)引起的經(jīng)紗張力中的低頻分量,送經(jīng)系統(tǒng)采用伺服電機(jī)加兩級減速的傳動(dòng)方案,第一級為行星齒輪減速器,第二級為蝸輪蝸桿減速箱,由渦輪帶動(dòng)送經(jīng)主軸傳動(dòng);
張力部件的張力擺輥是用來提供經(jīng)紗織造時(shí)的張力,并存儲因?yàn)殚_口運(yùn)動(dòng)和打緯運(yùn)動(dòng)過程中產(chǎn)生的張力變化的高頻分量,通過調(diào)整回?cái)[彈簧的長度,為使經(jīng)紗織造過程保持恒定的上機(jī)張力。
攏紗部件的主要作用是將送經(jīng)機(jī)構(gòu)送出的多層經(jīng)紗集中到一定的高度范圍內(nèi),方便出入主機(jī)。
2 送經(jīng)部件紗線退繞數(shù)學(xué)模型
為保證織機(jī)經(jīng)紗在織造過程中的張力恒定,經(jīng)紗主軸應(yīng)該完成一系列的紗線退繞動(dòng)作,為了在送經(jīng)過程中對經(jīng)軸退繞過程進(jìn)行有效的控制,需要對經(jīng)軸主軸退繞運(yùn)動(dòng)建立數(shù)學(xué)模型,送經(jīng)部件應(yīng)該保證經(jīng)軸以恒定的線速度送出經(jīng)紗,從而保證主軸從滿軸到空軸的整個(gè)退繞過程中的經(jīng)紗的張力恒定。
2.1 織軸經(jīng)紗的動(dòng)態(tài)轉(zhuǎn)動(dòng)慣量
在織機(jī)的織造過程中,經(jīng)軸的經(jīng)紗被不斷的送出,經(jīng)軸的半徑不斷減小,質(zhì)量也隨之減小,因此送經(jīng)系統(tǒng)是一個(gè)時(shí)變的,織軸的轉(zhuǎn)動(dòng)慣量為:
式中:ρ—經(jīng)紗的質(zhì)量密度(包括占積率);b—織軸卷繞寬度;r1—為經(jīng)軸的半徑(時(shí)變量);r0—空軸的半徑;
由上式可以看出,在整個(gè)織造過程中,由于r1的值始終在變化,因此織機(jī)的轉(zhuǎn)動(dòng)慣量也會隨之變化,r1等于:
上式中,δ為每層經(jīng)紗片的厚度;rm為織軸滿軸半徑;n為經(jīng)軸上經(jīng)紗退繞的層數(shù);Φ為經(jīng)軸的角位移;
3式代入2式:
將式4中的r12代入式1中可得:
經(jīng)紗的張力矩MT為:MT=iTR
式中i為減速比,T為張力,R為經(jīng)軸半徑;
2.2 經(jīng)軸受力分析
經(jīng)軸的受力情況如圖1所示:對軸心位置列運(yùn)動(dòng)方程為:
上式中:JZ為經(jīng)軸的轉(zhuǎn)動(dòng)慣量;CS為經(jīng)軸主軸的粘性摩擦系數(shù);ω為經(jīng)軸的角速度;i為電動(dòng)機(jī)主軸到送經(jīng)主軸的傳動(dòng)比;M0為電動(dòng)機(jī)的電磁轉(zhuǎn)矩;JD為電動(dòng)機(jī)的轉(zhuǎn)動(dòng)慣量;Jk為經(jīng)軸空軸時(shí)的轉(zhuǎn)動(dòng)慣量。
張力的變化量為:
式中,v2為紗線卷曲線速度;v1為紗線退繞線速度;Kf為紗線張力系數(shù);
根據(jù)式8繪制出紗線退繞的結(jié)構(gòu)如圖2所示:
由結(jié)構(gòu)圖看出,經(jīng)軸裝置的數(shù)學(xué)模型含有經(jīng)軸半徑立方項(xiàng)和4次方項(xiàng),由此可見環(huán)節(jié)具有非線性和參數(shù)時(shí)變性,經(jīng)軸半徑和轉(zhuǎn)動(dòng)慣量在送經(jīng)過程中均是時(shí)間的函數(shù),導(dǎo)致系統(tǒng)的模型中出現(xiàn)經(jīng)軸半徑的4次方項(xiàng)和經(jīng)軸半徑與轉(zhuǎn)動(dòng)慣量乘積項(xiàng),系統(tǒng)內(nèi)部機(jī)理較為復(fù)雜。
在處理非線性環(huán)節(jié)時(shí),通常在分析系統(tǒng)機(jī)理的基礎(chǔ)上進(jìn)行線性化處理,考慮到織機(jī)的織造速度相對較低,碳纖維紗線單層厚度非常小,因此,經(jīng)軸半徑在短時(shí)間內(nèi)變化非常小,近似認(rèn)為不變,相應(yīng)地經(jīng)軸半徑的導(dǎo)數(shù)為零,得到如圖3所示的經(jīng)軸系統(tǒng)簡化結(jié)構(gòu)圖。
根據(jù)圖3求出以經(jīng)軸張力為輸出量和以電機(jī)電磁轉(zhuǎn)矩為輸入量的經(jīng)軸系統(tǒng)傳遞函數(shù):
經(jīng)簡化處理后,經(jīng)軸裝置的傳遞函數(shù)為二階慣性環(huán)節(jié)。因此,可以進(jìn)行送經(jīng)軸的張力閉環(huán)控制算法的設(shè)計(jì)。
將經(jīng)軸尺寸參數(shù)和碳纖維性能參數(shù)帶入式(10),同時(shí)取經(jīng)軸半徑為0.5米,經(jīng)軸對象傳遞函數(shù)為:
式11就是在對系統(tǒng)進(jìn)行線性化之后獲得的二階系統(tǒng)傳遞函數(shù)。
3 經(jīng)紗張力控制方案
3.1 傳統(tǒng)PID控制
經(jīng)紗的張力控制,就是通過對經(jīng)紗張力的設(shè)置值與檢測值之間的比較,然后通過對控制經(jīng)軸的伺服電機(jī)的速度控制,達(dá)到為張力的控制:
PID控制器是一種線性調(diào)節(jié)器,它將設(shè)定的紗線張力與實(shí)際的輸出張力作對比,獲取張力偏差參數(shù)e(t),然后將偏差的比例、積分、微分通過線性組合構(gòu)成控制變量,對張力進(jìn)行控制,其控制原理為:
3.2 模糊參數(shù)自整定PID控制
模糊參數(shù)自整定PID控制器是以誤差e和誤差變化率ec作為輸入,利用模糊控制規(guī)則,將PID控制中的比例系數(shù)、積分系數(shù)和微分系數(shù)與e和ec之間建立模糊關(guān)系,然后,通過模糊控制器對e和ec的實(shí)時(shí)監(jiān)測,動(dòng)態(tài)的改變?nèi)齻€(gè)控制參數(shù),實(shí)現(xiàn)實(shí)時(shí)的動(dòng)態(tài)調(diào)整,其控制原理如圖:
模糊PID控制的核心思想就是利用系統(tǒng)的偏差和偏差變化率作為模糊控制器的輸出量,借助隸屬度函數(shù),并基于一定的模糊規(guī)則對系統(tǒng)中的PID控制器中的參數(shù)kp,ki,kd進(jìn)行實(shí)時(shí)的在線調(diào)整,從而對系統(tǒng)的動(dòng)態(tài)變化進(jìn)行有效的控制。
模糊控制器的輸入量為張力偏差e和張力偏差變化率ec,輸出變量U為ΔKp,ΔKI和ΔKD,因此是一個(gè)雙輸入,三輸出的模糊控制器。
輸入量e和ec以及三個(gè)輸出量:ΔKp,ΔKI和ΔKD的隸屬度函數(shù)采用三角形技術(shù)度函數(shù),將論域分為7個(gè)模糊集,分別為:NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),ZO(零),PS(正小),PM(正中)和PB(正大),根據(jù)模糊規(guī)則寫出輸入量與輸出量之間的49條模糊規(guī)則,其模糊規(guī)則表見表1。
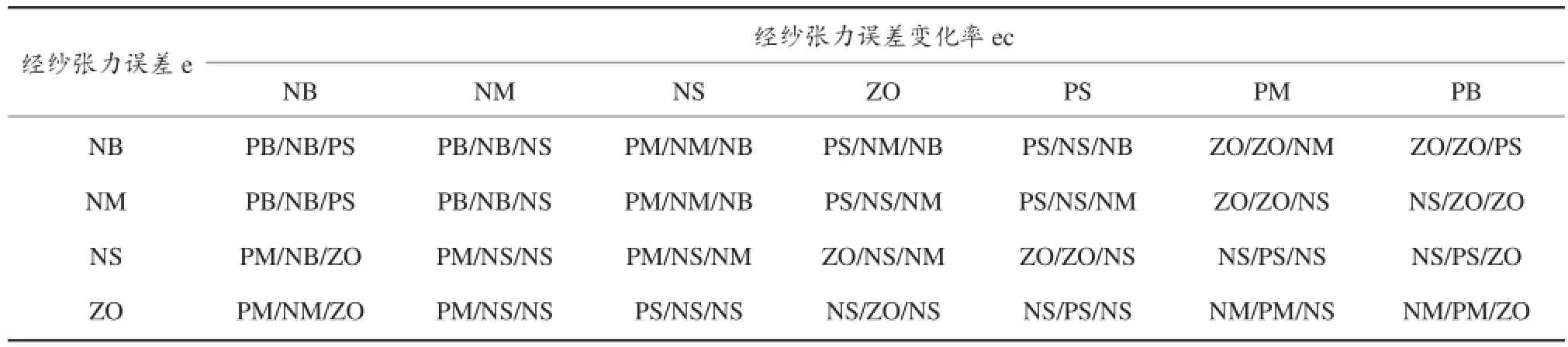
表1 ?Kp/?Ki/?Kd的模糊規(guī)則表

續(xù)表1
模糊控制的決策中的模糊交(and)采用min算子,模糊或(or)采用max算子,清晰化(defuzzification)采用centroid算法。
利用清晰化后的參數(shù)ΔKp,ΔKI和ΔKD對PID控制器的參數(shù)進(jìn)行修正,從而獲得修正后的Kp,KI和KD參數(shù)。
4 基于Simulink 仿真
借助matlab中的simulink仿真模塊,搭建出系統(tǒng)的仿真框圖,采用階躍信號作為輸入函數(shù),圖中的Fuzzy Logic Controller是通過FIS編輯器設(shè)置的模糊控制器,根據(jù)專家經(jīng)驗(yàn),設(shè)置Kp的初始值為12,KI的初始值為2,KD的初始值為0.5,調(diào)整參數(shù)a,b,c設(shè)置為1,0.2和0.05,同時(shí)對普通PID算法與模糊PID算法進(jìn)行仿真。
根據(jù)搭建的仿真框圖進(jìn)行仿真,仿真圖如下圖所示:
5 結(jié)論
從仿真結(jié)果可以表明,普通PID控制響應(yīng)速度雖然略快于模糊PID控制,但是模糊PID算法的超調(diào)量僅為20%,并且系統(tǒng)達(dá)到穩(wěn)定所需的時(shí)間僅為PID控制的50%,系統(tǒng)更加的穩(wěn)定并且控制張力更加的精確,較普通PID控制算法能夠更好地適應(yīng)對經(jīng)紗張力控制的要求。
[1] 鄭 華. 電子送經(jīng)卷取系統(tǒng)的研究與開發(fā)[D]. 上海:東華大學(xué),2012.
[2] 陳家新. 劍桿織機(jī)經(jīng)紗張力數(shù)學(xué)模型及仿真[J]. 上海:東華大學(xué)學(xué)報(bào),2012.
[3] 李賢喆, 江 兵, 王 強(qiáng), 李軒愷 . 模糊PID控制在輪式機(jī)器人直立系統(tǒng)中的應(yīng)用[J/OL].計(jì)算機(jī)技術(shù)與發(fā)展, 2016(9). http://www.cnki.net/kcms/detail/61.1450.tp. 20160823.1112.008.html.
[4] 李 濤.劍桿織機(jī)送經(jīng)卷曲運(yùn)動(dòng)的雙控法研究[J].測控技術(shù), 2015(34):67-70.
[5] 王 藩.經(jīng)紗張力的模糊參數(shù)自整定PID控制研究[J].浙江理工大學(xué)學(xué)報(bào),2009(26):165-168.
[6] 潘 亮.基于模糊PID主從式方法的多電機(jī)同步控制[J].微型機(jī)與應(yīng)用,2016(35):5-7.
[7] 吳飛青.基于模糊專家控制的織機(jī)經(jīng)紗恒張力控制研究[J].中國機(jī)械工程,2008(19):384-387.
[8] 馬小魚.模糊PID復(fù)合控制算法的有效改進(jìn)[J].現(xiàn)代電子技術(shù),2016(39):153-155.
[9] 楊小龍,涂鑫陽,馬自會.基于改進(jìn)模糊PID算法的空燃比控制策略研究[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版), 2015(42):34-39.
[10] 謝 宏,楊 鵬,陳海濱,等.遺傳優(yōu)化模糊PID融合算法的5自由度機(jī)械手控制[J].電子測量與儀器學(xué)報(bào),2015(29):21-30.
[11] 楊 璐,雷菊陽.基于MATLAB的參數(shù)整定模糊PID控制器的兩種設(shè)計(jì)方法[J].計(jì)算機(jī)測量與控制,2015, 23(4):1212-1214.
[12] LI C S, ELBULUK M. A robust sliding mode observer for permanent synchronous motor drives[C]. Proceedings of IEEE IECON'02. Piscataway, New Jersey: IEEE Press, 2002:1014-1019.
[13] CHU J B,HU Y W,HUANG W X, et al. An improved sliding mode observer for position sensorless vector control drive of PMSM[C]. Proceedings of IPEMC'09. Piscataway, New Jersey: IEEE Press,2009:1898-1902.
[14] JanabiSharifi F. Design of a Self- adaptive FuzzyTension Controller for Tandem Rolling Source[J] .IEEE Transactions on Industrial Electronics, 2005,52(5):1428O1438.
Yarn tension control of warp yarn feeding system of carbon fiber loom based on fuzzy PID control
LIU Guo-hui2, JIANG Xiu-ming1,2, LIU Wei1,2*, XING Chao-qi2
(1. Advanced Mechatronics Equipment Technology Tianjin Area Major Laboratory, Tianjin 300387, China;2. School of Mechanical Engineering,Tianjin Polytechnic University, Tianjin 300387, China)
Accurate control of the carbon fiber angle contact loom tension change law is tension control is the key, and it as a loom five bodies sent by the system and is a key part of the loom tension control, in order to make up the shortage of ordinary control methods in the tension control, this paper in the establishment of the send system model based on the proposed a control strategy of PID controller based on fuzzy. In MATLAB through the comparison of the simulation of fuzzy PID and traditional PID control, the results show that the fuzzy PID control has the advantages of small overshoot, quick response, more applicable to the control of tension.
delivery system;tension model;fuzzy PID;carbon fiber loom;dynamics modeling
TS103.2
A
投稿日期:2016-10-30
劉國輝(1991-),男,碩士研究生,研究方向:機(jī)械工程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
上海建材(2019年4期)2019-05-21 03:13:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
纖維復(fù)合材料(2018年4期)2018-04-28 08:45:28
纖維復(fù)合材料(2018年3期)2018-04-25 07:22:58
纖維復(fù)合材料(2018年4期)2018-02-18 19:02:51
纖維復(fù)合材料(2018年4期)2018-02-18 19:02:51
