GNSS導航信號常見畸變產生機理及對測距性能影響分析
2016-01-27 08:06:47賀成艷盧曉春
系統工程與電子技術 2015年7期
賀成艷, 郭 際, 盧曉春, 盧 鋆
(1. 中國科學院國家授時中心, 陜西 西安 710600; 2. 中國科學院精密導航定位與
定時重點實驗室, 陜西 西安 710600; 3. 北京跟蹤與通信技術研究所, 北京 100049)
?
GNSS導航信號常見畸變產生機理及對測距性能影響分析
賀成艷1,2, 郭際1,2, 盧曉春1,2, 盧鋆3
(1. 中國科學院國家授時中心, 陜西 西安 710600; 2. 中國科學院精密導航定位與
定時重點實驗室, 陜西 西安 710600; 3. 北京跟蹤與通信技術研究所, 北京 100049)
摘要:在全球衛星導航系統(global navigation satellite system,GNSS)導航信號的產生、發射、傳播和接收過程中各種環節的異常,都有可能對衛星信號質量產生影響。用戶接收到異常信號后,會在一定程度上影響其位置、速度、時間(position, velocity, time, PVT)性能。開展GNSS導航信號監測評估,可以在第一時間及時準確發現異常并快速告警,確保GNSS用戶,特別是民航、海事等涉及生命安全領域相關用戶的高效、可靠使用。然而,針對GNSS導航信號的各種異常的綜合監測評估,目前國內外尚無全面而系統的研究成果,因此無法進行實時或準實時的信號異常自動識別與分析。文中提出建立GNSS導航信號畸變模型庫的理念,針對GNSS導航信號的產生、發射、傳播和接收過程中各類信號異常,通過仿真分析和實測數據驗證,建立一套較完善的數學分析方法,研究GNSS導航信號各類常見畸變產生機理及特點,并在此基礎上,定性或定量地給出不同程度的信號畸變對信號質量評估以及對用戶定位的影響。本文的研究成果能夠為衛星系統故障自動識別與快速定位提供支撐材料。同時,還可為衛星星上信號產生方面的設計者提供參考,在信號設計和優化過程中提供依據。
關鍵詞:全球導航衛星系統; 導航信號; 畸變; 測距性能
0引言
導航信號是全球衛星導航系統(global navigation satellite system,GNSS)最核心的組成部分,導航信號質量的優劣,將直接反映GNSS定位、測速、授時性能和衛星有效載荷的工作狀態及電性能指標。開展GNSS導航信號監測評估,可以在第一時間及時準確發現異常并快速告警,確保GNSS用戶,特別是民航、海事等涉及生命安全領域用戶的高效、可靠使用。
在對信號監測過程中,根據公開文獻,比較有代表性的GNSS信號畸變或異常案例如下:
(1) 美國GPS PRN-19衛星于1989年10月21日成功發射,同年11月14日宣布正式運行。然而,在軌運行8個月之后,L1信號功率譜出現10 dB左右的載波泄漏及譜不對稱[1]。但是沒有人及時發現該問題,直到1993年3月,美國聯邦航空管理局利用差分導航實現輔助著陸時發現,C/A碼與P碼嚴重不同步,約有6 m的偏離,當SV19參與L1 C/A差分解算時,就會產生3~8 m的定位偏差。對GPS PRN-19衛星信號監測評估后,進行一系列修正,最終定位偏差降低至不到25 cm,RF譜中無載波泄漏和不對稱現象發生。
(2) GPS SVN49于2009年發射,發射不久即受廣泛關注:不僅因為第一次發射L5信號,更是因為利用德國宇航研究院的30 m信號監測評估系統發現,該衛星發射的信號中含有L1和L2多徑信號。這種信號異常在高仰角處更明顯,較高仰角處的信號星座圖出現畸變[2]。經問題分析排查,發現這種異常是由L5有效載荷連接部分的輔助天線接口處產生內在的L1/L2多徑信號所致。
(3) 歐盟利用德國宇航研究院30 m天線、奇爾波頓天文臺25 m天線等空間信號質量監測與評估設備,長期實時監測GIOVE-A與GIOVE-B試驗衛星信號。觀測期間曾第一時間發現E1 BOC(15,2.5)和E5 AltBOC(15,10)的功率譜不對稱,并分析了該現象對用戶的影響,為故障排查提供有價值的參考依據。
縱觀GNSS歷史,導航衛星信號曾出現過幾次信號異常,對用戶(尤其是高精度用戶)帶來了不同程度的影響,雖然最終經過信號質量分析,排查出故障原因并得到修正,但是,大多情況下只是就事論事,只針對發現的問題進行事后分析研究,目前國內外尚無體系性研究成果和專業性研究平臺,尚未形成導航信號實時異常自動識別與評估機制,中國科學院國家授時中心正在建設國內最大口徑的40 m信號質量監測評估系統,并聯合院內外相關領域優秀青年專家,充分利用國內外現有信號資源平臺,打造世界一流的專業性信號質量監測評估平臺,本文的研究成果可以為信號故障快速排查與定位提供有價值的參考依據。
建立GNSS導航信號畸變模型庫,能夠針對GNSS導航信號的產生過程、發射過程、傳播過程和接收過程,給出各種信號單一畸變和組合畸變數學分析模型,模擬并生成各類可能的畸變,給出各類單一或多種畸變組合時的異常信號特性,包括頻域功率譜特性、時域碼片波形特性(數字畸變和模擬畸變等)、眼圖特性、調制特性(星座圖、相位誤差和幅度誤差等)、相關特性(相關函數曲線的對稱性和平滑性、相關損耗等)等,并與標準信號比對,根據與理想信號的差異以及各類畸變的特性,分析畸變可能出現的原因及其惡化程度。
基于此,本文首先簡要介紹GNSS空間信號常見畸變及畸變產生機理,并給出導航信號各類常見畸變的特點,在此基礎上,進一步研究各種畸變對用戶可能帶來的影響。在文章的最后,給出實測導航信號頻譜畸變、波形畸變及其特點,并給出頻譜和波形畸變可能產生的原因及對用戶帶來的影響,為衛星系統故障快速排查提供有價值的參考依據。
1GNSS常見畸變及其產生機理研究
在衛星導航信號到達用戶定位解算軟件之前,信號從產生到接收的各個環節若出現異常,如有效載荷、空間大氣、多徑效應、電磁干擾、地面接收通道等,都有可能對衛星導航信號質量產生影響。實際接收到的衛星導航信號,有可能是其中某一個環節異常引起的畸變,也有可能是多種環節異常引起的畸變的組合。上述各環節單獨可能對導航信號產生的影響如圖1所示,其中,A表示頻譜畸變,B表示碼片波形畸變,C表示碼間串擾,D表示信號多徑,E表示環境電磁干擾,F表示相位噪聲。

圖1 導航信號常見畸變產生機理示意圖
頻譜畸變主要表現為載波泄漏、頻譜不對稱、雜散等現象:在模擬調制中,若正交調制器載波泄漏至輸出端,則會導致載波泄漏現象;若發射濾波器異常或發射機功放飽和,則可能引起頻譜不對稱現象;若星上發射機功放惡化或本振信號出現雜散,則會出現信號雜散。
引言中提到的美國GPS PRN19衛星的信號異常,則是由碼片波形畸變所致。文獻[3]提出了“2nd-order step”(2OS)模型,歸納分析3種可能的碼片畸變模型:數字畸變、模擬畸變和混合畸變[3]。這3種畸變類型將在第2.2節詳細介紹。
若系統傳輸特性不理想,如:信道、頻域均衡器、發射接收濾波器特性不良等,可能使相鄰碼元脈沖波形互相疊加,此現象稱為碼間串擾。
若發射天線接口不匹配或性能惡化、隔離器(或環形器)性能差、接收環境多徑效應,則可能產生星上的信號內多徑和地面多徑。主要表現在接收機碼形失真和相關峰不對稱。GPS SVN49衛星的畸變是由于發射天線接口不匹配帶來的星上多徑所致。
常見的干擾主要包括窄帶干擾、寬帶干擾及脈沖干擾等。干擾或噪聲都可看作獨立于有效信號的加性干擾,可通過相應算法最大程度上減小或消除,而碼間串擾屬乘性干擾,不可剔除。目前,干擾信號的識別與分離技術,是導航信號處理的一大熱點及難點。
系統內各種噪聲引起的輸出信號相位隨機起伏,稱為相位噪聲。相位噪聲主要由變頻器本振源或參考源純度不高所致。在時域上表現為“相位抖動”,也即輸出信號相位的隨機變化;在頻域上表現為“頻譜不純”,也即看到的不是一根譜線。常用單位赫茲的噪聲密度與信號總功率之比來衡量相位噪聲,單位為dBc/Hz。相位噪聲是評價頻率源頻譜純度的重要指標之一。
GNSS導航系統的各種異常或畸變對信號質量及信號性能的影響如圖2所示。本文通過對接收信號相關參數或特性(包括功率譜、眼圖、星座圖、碼片波形、相關函數、偽距、載波相位、測距碼相干性等)的分析,可以評估接收GNSS信號是否存在畸變,為GNSS導航衛星下行信號質量評估結果的分析提供參照模型,為信號故障定位提供參考依據。信號畸變性能影響分析是為下一步實現信號畸變類型的自動識別做特征提取研究。
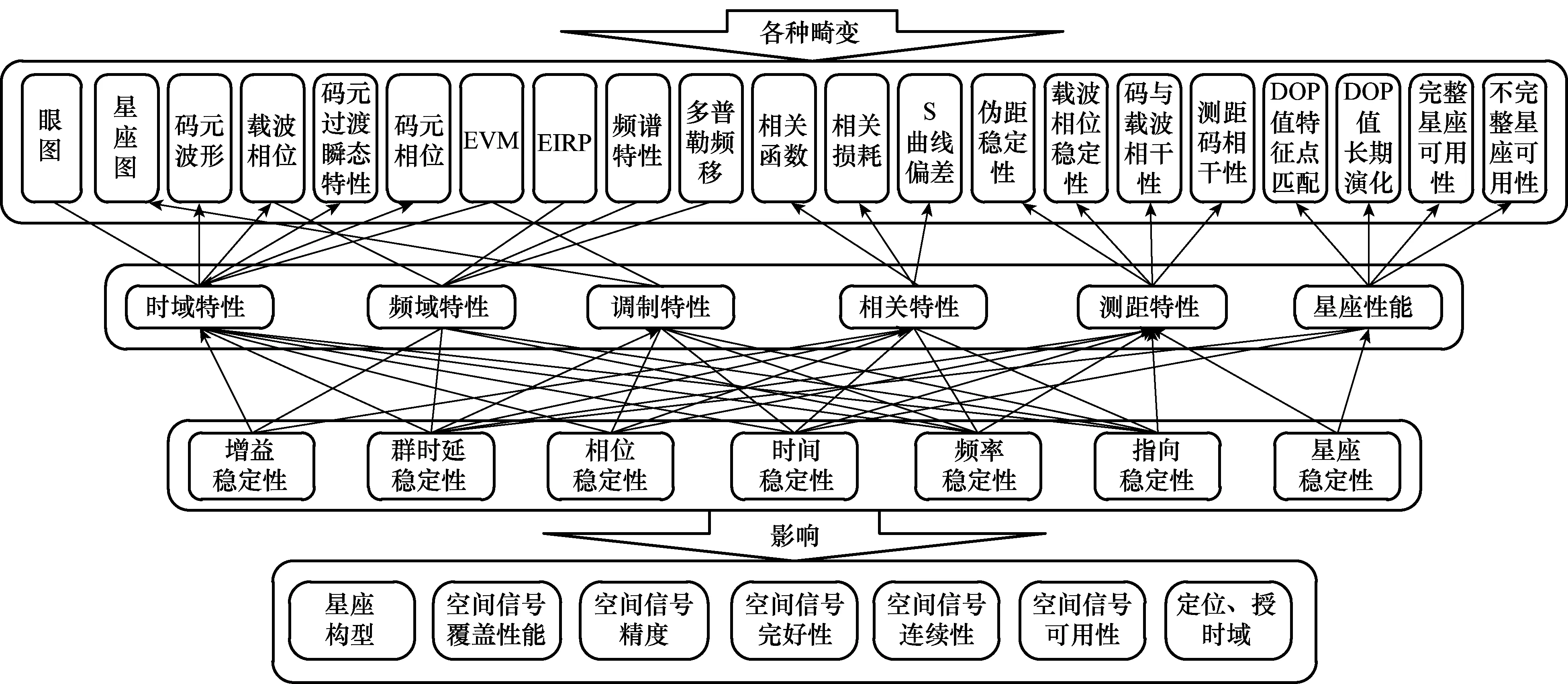
圖2 各種畸變對信號質量及信號性能影響分析
2GNSS常見畸變特性分析
2.1頻譜
頻譜畸變主要表現為以下3種情況:
(1) 頻譜不對稱:信號頻譜包絡的左右不對稱、頻譜擴展或壓縮等。以BPSK(10)調制信號為例,當出現頻譜不對稱畸變時,頻譜如圖3所示。
(2) 信號雜散:發射單載波時,信號帶內及帶外出現雜波;發射擴頻信號時,雜波疊加至有用信號頻譜包絡上。雜波的影響類似于干擾,在此不再詳述。
(3) 載波泄漏:信號載頻或諧波位置出現附加載波。帶有載波泄漏的信號經載波剝離后,其電平將發生平移,引入直流分量。圖4給出了載波泄漏時的信號功率譜。
2.2碼片波形
碼片波形畸變主要表現為以下3種情況[4]。
(1) 數字畸變:擴頻碼正負碼形寬度不一致,相關峰擴展和平移。主要產生于衛星信號生成單元的數字電路部分,獨立于模擬電路[5]。圖5展示了碼片下降沿有d=0.3Tc延時的波形及其相關峰曲線,Tc表示一個碼片周期。可以看出,數字畸變會帶來相關曲線的平移和中心頂峰處的平坦“死區”。

圖3 BPSK(10)頻譜不對稱現象示意圖

圖4 載波泄漏情況下信號功率譜
(2) 模擬畸變:基帶碼形抖動失真,相關峰曲線扭曲變形[6],如圖6所示。可以看出模擬畸變會使接收信號相關峰頂峰尖銳處展寬,對稱性變差,并且增益降低。若信噪比較低,則會降低接收機環路穩定性,引入較大的測距誤差。
(3) 混合畸變:數字畸變和模擬畸變同時存在,正負碼形寬度不一致且碼片波形抖動失真;相關峰扭曲擴展。GPS PRN-19事件,被認為就是這種混合畸變產生的結果[3]。圖7給出了混合畸變碼片波形和相關峰曲線。

圖5 數字畸變信號碼片波形和相關峰

圖6 模擬畸變信號碼片波形和相關峰

圖7 混合畸變信號碼片波形和相關峰
2.3碼間串擾
碼間串擾的表現形式:相鄰碼元的脈沖波形相互疊加,從而影響正常判決。對比圖8(a)和圖8(b)可知:眼圖張開的大小和跡線寬度反映碼間串擾的強弱。若多組線重疊性越好,眼圖張開越大,則碼間串擾越小,反之越大。

圖8 碼間串擾及噪聲情況下的眼圖
2.4多徑
多徑表現形式:接收碼形失真,相關峰曲線不對稱,多徑對碼形和相關峰影響如圖9所示。在多徑情況下,由于直達信號和多徑信號的幅度相位不同,信號間互相疊加,使得實際接收信號的幅度和相位發生畸變[7-8],帶來偽距測量誤差和載波相位測量誤差。

圖9 多徑對碼形和相關峰影響
2.5電磁干擾
常見干擾主要包括單頻干擾、窄帶干擾和寬帶干擾[9]。可以將載波泄漏可以看做是單頻干擾的特例[10-11]。一般地,若干擾帶寬小于有用信號帶寬的10%時,認為是窄帶干擾;若大于10%,則認為是寬帶干擾[12]。圖10給出實測導航信號受干擾影響情況。
2.6相位噪聲
相位噪聲會會影響信噪比,影響系統的抗干擾能力[13-14],導致接收信號碼片長短不一,眼圖上升下降邊緣模糊,相關損耗增大,造成接收機的捕獲、跟蹤等性能下降,從而影響信號測距性能[15]。

圖11 相位噪聲時的星座圖和相關曲線
2.7其他畸變
除了上述常見畸變外,還有AM-AM飽和失真、AM-PM失真、固定干擾/雜散等畸變形式,但由于這些畸變現象及影響表現基本上都可以歸結為前面討論畸變的某種或幾種的結合,因此本節不再詳述。
3GNSS常見畸變對測距性能的影響
前文已經介紹了GNSS導航信號常見畸變現象產生機理及特點,本節則進一步研究各種畸變分別對用戶可能帶來的測距誤差。由于篇幅原因,且目前發現的導航信號常見畸變為頻譜畸變和碼片波形畸變,在此重點介紹這兩種信號畸變對用戶測距影響。
3.1頻譜畸變影響
3.1.1載波泄漏影響分析
根據Betz給出的經典公式來計算測距誤差[16]:在理想情況下,考慮信號跟蹤誤差隨功率譜、接收帶寬、相關器間隔、跟蹤環帶寬、積分時間和載噪比等條件的變化,EMLP碼跟蹤誤差方差可表示為
(1)
假設干擾功率譜是白色的,單邊功率譜為N0;信號接收功率為Pc;接收機前端帶寬嚴格帶限,為βr;干擾信號等效雙邊帶功率譜密度為射頻干擾單邊功率譜密度的兩倍;有用信號復包絡s(t)的功率為射頻信號的兩倍,信號s(t)的功率為Ps(不考慮信道失真時),信道影響等效基帶傳遞函數為H(f);GS(f)為信號功率譜;w(t)為單位功率;T表示積分時間;Δ表示相關器步長,單位為s;BL環路帶寬,單位為Hz。
假設衛星信號到達地面功率約為-158 dBW,載噪比為43.5 dB/Hz。利用BDS GEO-1 B3信號進行仿真,信號帶寬為20.46 MHz,信噪比為-29.609 dB,則有用信號信噪比隨載波泄漏能量變化關系仿真結果如圖12(a)所示。

圖12 信噪比隨載波泄漏功率變化關系
為了進一步分析信噪比與接收機捕獲跟蹤性能的關系[17],圖12(b)給出在不同虛警概率情況下,捕獲概率隨信噪比的變化關系。其中參數設置分別為:積分時間0.002 s,碼速率10.23 MHz。
利用測距誤差公式(1),參數設置分別為:積分時間0.002 s,碼速率10.23 MHz,前端帶寬40.92 MHz,相關器間隔0.5 chip。圖13給出測距誤差隨信噪比變化關系曲線。

圖13 測距誤差與信噪比關系
由圖12和圖13可以看出,若接收信號頻譜載頻位置載波泄漏功率為0~15 dB,則對接收信號捕獲概率和跟蹤誤差影響甚微,基本不會對用戶帶來多大的影響。
3.1.2譜不對稱影響分析
根據頻譜不對稱產生機理公式[18-19],有
A=10·lg10(1-2α)
(2)
式中,α為峰峰衰減因子。圖14給出了分別利用BDS GEO-1 B3的偽隨機噪聲(pseudo random noise, PRN)碼和Galileo GIOVE-B E5的PRN碼,分析了不同參數A對信號功率損耗影響。其中圖14(a)為BDS結果,積分時間0.001 s,圖14(b)為Galileo結果,積分時間0.004 s。碼率10.23 MHz,前端帶寬40.92 MHz,相關器間隔0.5 chip。

圖14 不同衰減對功率損耗的影響
下面我們利用測距誤差公式(1),分析譜不對稱帶來的BDS GEO-1 B3 PRN碼的測距誤差。取積分時間0.002 s,碼率10.23 MHz,前端帶寬40.92 MHz,相關器間隔0.5 chip,仿真理想功率譜和不對稱功率譜(不對稱度為2 dB)在不同信噪比條件下的跟蹤誤差,如圖15所示。

圖15 理想譜和畸變譜的跟蹤誤差比較
經過仿真分析發現,當信噪比大于-35 dB時,由高頻端功率譜線高于低頻端功率譜線0.4~2 dB產生的不對稱帶來的測距誤差增量不高于0.002 5 m。
3.2碼片波形畸變影響
假設超前減滯后鑒相器的相關器間隔為d,則鑒相器的跟蹤誤差τ可由式(3)來計算[20]:
(3)
式中,Rdistortion表示含有畸變的測距碼相關函數。
圖16是以BDS GEO-3 B1I測距碼為例,不同數字畸變(提前0~0.3 chip)和不同相關器間隔情況下的鎖定點偏差仿真分析結果。結果表明,數字畸變越大,則帶來的鎖定點偏差越大。

圖16 不同數字畸變鎖定點偏差分析結果
假設數字畸變提前146.6 ns,也即0.3 chip,則不同相關器間隔下(間隔從0~1個碼片)的S曲線及鎖定點偏差如圖17所示。圖中鎖定點偏差為負,表示相關峰向左偏移。可以看出,從0.2 chip之后鎖定點偏差基本不變,這說明在相關曲線頂峰處有平坦區,但相關曲線對稱性較好。

圖17 數字畸變情況下的S曲線及鎖定點偏差
假設只有模擬畸變,相關器間隔為0.5 chip,則不同衰減因子和不同衰減振蕩頻率情況下,鎖定點偏差如圖18所示。分析結果表明,σ和fd的值越大,則帶來的鎖定點偏差越小。當fd=17 MHz,σ=8.8時,鎖定點偏差僅為0.067 m。
圖19給出的是當參數分別為fd=6 MHz,σ=3.8時,不同相關器間隔下(間隔從0~1個碼片)的S曲線及鎖定點偏差。若存在混合畸變:相關器間隔為0.5 chip,數字畸變延遲0.3 chip,則不同衰減因子和不同衰減振蕩頻率情況下,鎖定點偏差如圖20所示。
若數字畸變提前0.3 chip,模擬畸變參數分別為fd=6 MHz,σ=3.8時,不同相關器間隔下的S曲線及鎖定點偏差如圖21所示。可以看出,當相關器間隔0.5 chip時,帶來的測距誤差約為10 m。
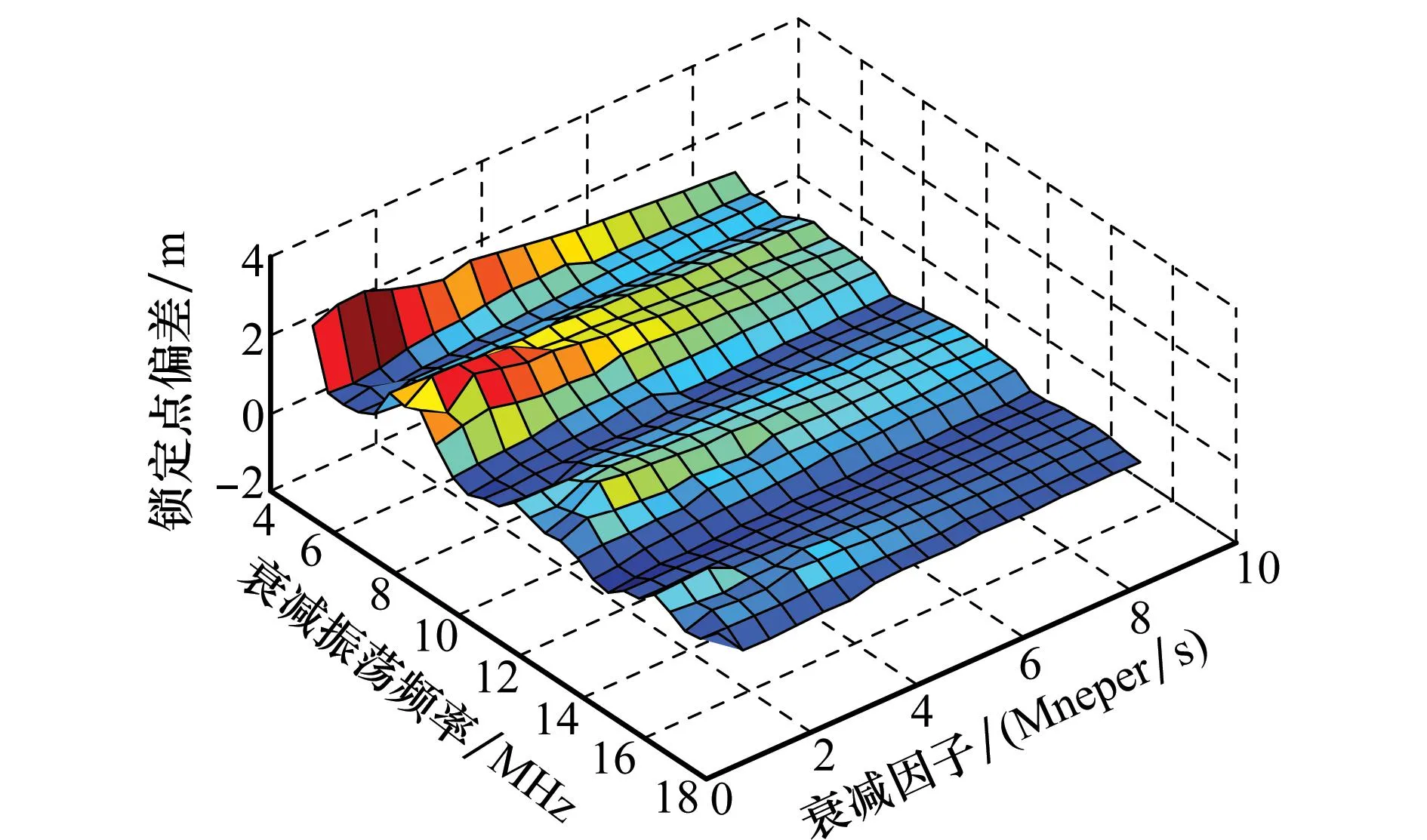
圖18 不同衰減因子和不同振蕩頻率時的鎖定點偏差

圖19 模擬畸變情況下的S曲線及鎖定點偏差 圖20 數模混合畸變鎖定點偏差分析結果

圖21 混合畸變情況下的S曲線及鎖定點偏差
4實測GNSS信號畸變現象分析
4.1頻譜畸變實測結果
利用中國科學院國家授時中心的7.3 m天線空間信號質量監測評估系統,將Agilent頻譜分析儀E4440A的相關參數分別設置為:SPAN:40 MHz;VBW:1kHz;RBW:1kHz。2012年4月份監測到北斗衛星GEO-3衛星B3頻點空間信號的頻譜如圖22所示。可以看出,在BDS GEO-3 B3信號中心頻點及第一諧波處有高于信號正常功率譜包絡的能量。經研究分析,存在載波泄漏現象。這很可能是由于正交調制器載波泄漏至輸出端所致。

圖22 衛星信號1 kHz帶寬頻譜監測結果
為此連續觀察該星B3頻點信號功率譜,圖23為衛星信號1kHz帶寬連續7天的頻譜監測色溫圖,橫縱坐標分別表示頻率和時間。分析結果表明:黃色中間的紅色曲線說明有高出信號正常功率的能量存在。而中心頻點以天為單位來回漂移則說明存在多普勒。

圖23 衛星信號1 kHz帶寬頻譜色溫圖
從圖22和圖23中可以看出,載波泄漏能量只有約5 dB。根據3.1.1節研究結果可知,此種程度的載波泄漏對用戶影響甚微,基本可以忽略不計。
4.2碼片波形畸變實測結果
實測GPS L5信號I/Q支路測距碼畸變情況如圖24所示。由于L5采用BPSK(10)調制,標準信號I/Q支路測距碼長度為1/10.23e6 Hz=97.751 7 ns,而圖中實測信號I/Q支路測距碼都有混合畸變,其中I支路正負極性碼片平均分別延遲5.5 ns和提前5.5 ns;Q支路正負極性碼片平均分別延遲3.9 ns和提前3.9 ns。經分析研究,認為這種數模混合畸變很可能是由于GPS衛星星上信號生成單元的數字電路部分異常,以及星上發射基帶濾波或射頻濾波異常所致。

圖24 GPS L5 IQ支路測距碼數字畸變分析示意圖
5結論
為系統全面地分析信號異常及其對測距性能的影響,本文首先簡要介紹GNSS空間信號各類常見畸變,包括頻譜畸變、碼片波形畸變、碼間串擾、多徑、電磁干擾和相位噪聲的產生機理,分析每種常見信號畸變的特點,并在此基礎上,進一步研究信號畸變對測距性能影響。
由于篇幅原因,僅給出頻譜畸變和碼片波形畸變的影響及實測結果。研究結果表明:若載波泄漏功率小于15 dB,則對信號捕獲跟蹤影響甚微,當大于15 dB時,隨著泄漏功率的增大,將會降低接收機靈敏度,對信號的接收、捕獲、跟蹤和測距等造成嚴重影響,須采取相應措施抑制載波泄漏;在信噪比高于-35 dB時,頻譜不對稱小于2 dB,產生的信號測距誤差增量不高于0.002 5 m。但是隨著譜不對稱程度的增加,將會對信號性能產生影響;模擬畸變參數σ和fd的值越大,并且數字畸變越小,對測距性能影響越小,經多種監測手段、多種數據來源及多種分析方法的比較,對GPS衛星信號分析結果表明:GPS系統各衛星PRN碼的數字畸變都不是0;PRN-14碼的數字畸變最大,約4.5 ns;越老的衛星,數字畸變越小。若假設而只有某顆衛星數字畸變為10 ns, 其他各星都是理想的,則將會產生SPS(標準定位服務)測距誤差約1.6 m,對于差分用戶來說測距誤差大約6 cm。
由于目前北斗和GPS系統實測信號主要為二相相移鍵控(binary phase shift keying, BPSK)或正交相位偏移鍵控(quadrature phase shift keying, QPSK)調制方式,本文實測結果以QPSK調制為主進行分析。下一步將針對各類BOC信號,如BOC(1,1)、BOC(6,1)、BOC(10,5)、BOC(15,2.5)、AltBOC(15,10)等調制方式,詳細分析各類BOC新信號體制下的畸變類型及對測距性能影響。為新信號體制下衛星導航信號畸變的故障預警以及快速排查定位提供有力支撐材料。本文的研究成果可以幫助在進行信號質量評估時建立信號異常分析比對模板,能在檢測到信號異常的同時及時給出信號異常原因,為故障快速排查提供數據和支撐材料。
參考文獻:
[1] Edgar C, Czopek F, Barker L B. A cooperative anomaly resolution on PRN-19[C]∥Proc.oftheInstituteofNavigation, 1999: 2281-2284.
[2] Thoelert S, Erker S, Montenbruck O. GPS SVN49-L1 anomaly analysis based on measurements with a high gain antenna[C]∥Proc.oftheGNSSSignal, 2009: 192-198.
[3] Robert E P. Multicorrelator techniques for robust mitigation of threats to GPS signal quality[D].California: Department of Mechanical Engineering of Stanford University, 2001.
[4] Jakab A J. An approach to GPS satellite failure detection[C]∥Proc.oftheInstituteofNavigation, 1999: 1029-1038.
[5] Andrew J J. Quality monitoring Of GPS signals[D]. Alberta: University of Calgary, 2001.
[6] Robert E P. Nominal signal deformation: limits on GPS range accuracy[C]∥Proc.oftheInternationalSymposiumonGNSS, 2004:1980-1992.
[7] Robert E P, Akos D M, Enge P. Robust signal quality monitoring and detection of evil waveforms[C]∥Proc.oftheInstituteofNavigation, 2000:1180-1190.
[8] Ray J K, Cannon M E. Characterization of GPS carrier phase multipath[C]∥Proc.oftheInstituteofNavigationNationalTechnicalMeeting, 1999:243-252.
[9] Jakab A J, Townsend B R. Analysis of the multipath meter performance in the presence of anomalous satellite signals[C]∥Proc.oftheInstituteofNavigation, 2001:102-114.
[10] Yang Y X. Progress, contributions and challenges of Beidou satellite navigation system[J].ActaGeodaeticaetCartographicaSinica, 2012, 39(1):1-6.(楊元喜. 北斗衛星導航系統的進展、貢獻與挑戰[J].測繪學報,2011,39(1):1-6.)
[11] Tang Z P, Zhou H W, Hu X L, et al. Performance analysis of compass navigation signals[J].ScienceChinaG:Physics,Mechanics&Astronomy,2010,40(5):592-602.(唐祖平,周鴻偉,胡修林,等.Compass導航信號性能評估研究[J].中國科學:物理學理學天文學,2010,40(5):592-602.)
[12] Tan S S, Zhou B, Guo S T, et al. Signal design of China global satellite navigation system[J].ScienceChinaG:Physics,Mechanics&Astronomy,2010,40(5):514-519.(譚述森,周兵,郭盛桃,等.我國全球衛星導航信號設計研究[J].中國科學:物理學理學天文學,2010,40(5):514-519.)
[13] Misra P, Enge P.Globalpositioningsystem:signals,measurements,andperformance[M].Lincoln: Ganga Jamuna Press, 2012:1125-1134.
[14] Montenbruck O, Steigenberger P, Sch?nemann E, et al. Flight characterization of new generation satellite clocks[C]∥Proc.oftheInstituteofNavigation, 2012:529-538.
[15] Mallette L A, White J, Rochat P. Space qualified frequency sources (clocks) for current and future GNSS applications[C]∥Proc.ofthePositionLocationandNavigationSymposium,2010:903-908.
[16] Betz J W. Effect of narrowband interference on GPS code tracking accuracy[C]∥Proc.oftheInstituteofNavigationNationalTechnicalMeeting, 2000:894-906.
[17] Shao B, Liu J S, Zhao R B, et al. A user differential range error calculating algorithm based on the analytic method[J].ChineseJournalofAeronautics, 2013 24(6), 762-767.
[18] Thoelert S, Erker S, Furthner J, et al. Latest signal in space analysis of GPS IIF, COMPASS and QZSS[C]∥Proc.ofthe5thESAWorkshoponSatelliteNavigationTechnologies,2011:1209-1213.
[19] Niu F. Research of GNSS integrity enhancement theory and method[D].Zhengzhou:Information Engineering University,2008.
[20] Mi J. The monitoring methods, techniques, and application of GNSS completeness[D]. Wuhan: Wuhan University, 2011.
賀成艷(1986-),女,助理研究員,博士,主要研究方向為GNSS衛星導航信號處理技術、GNSS信號質量評估技術。
E-mail:hechengyan@ntsc.ac.cn
郭際(1955-),男,研究員,博士研究生導師,主要研究方向為天文測時、數據誤差分析、星表編制、國際地球自轉聯測、授時臺建設和現代化技術升級改造、導航系統建設。
E-mail:guoji@ntsc.ac.cn
盧曉春(1970-),女,研究員,博士研究生導師,博士,主要研究方向為精密時間信息傳輸與信息處理、無線電測距技術與定位導航。
E-mail:luxc@ntsc.ac.cn

網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150106.1159.003.html
Generation mechanisms of GNSS navigation signal distortions and
influence on ranging performance
HE Cheng-yan1,2, GUO Ji1,2, LU Xiao-chun1,2, LU Jun3
(1.NationalTimeServiceCenter,ChineseAcademyofSciences,Xi’an710600,China; 2.KeyLaboratoryof
PrecisionNavigationandTimingTechnology,ChineseAcademyofSciences,Xi’an710600,China;
3.BeijingInstituteofTrackingandTelecommunicationTechnology,Beijing100049,China)
Abstract:In the signal generation, emission, transmission and receiving processes of the global navigation satellite system (GNSS), due to some unpredictable anomalies or effects, there are various abnormalities that would affect GNSS signal quality. Consequently, those unpredictable anomalies and effects received by users would influence the position, velocity and time (PVT) performance of the GNSS. By monitoring and assessment of GNSS signal quality, it would be possible to detect signal distortions and warn the users as soon as possible, thus guaranteeing a safe and efficient use of the GNSS, especially for civil aviation and maritime affair users. However, for the monitoring and assessment of a variety of abnormal GNSS navigation signals, there are no comprehensive and systematic research results yet, and no real-time or quasi real-time automatic identification and mechanism for signal distortion analyzing at present. The idea of establishing a GNSS signal distortion mo-del is introduced. To detect GNSS signal distortions caused during the processes from signal generation to signal receiving, and to further analyze their impacts on the service performance of the GNSS, a relatively complete mathematical method is proposed through simulation and data verification. Besides, the generation mechanisms and characteristics of GNSS signal distortions are analyzed in detail, and based on that, the influences of GNSS signal distortions on signal quality assessment and user positioning are given both in qualitative and quantitative methods. The achievements in this paper could be used as a valuable technical reference for automatic identification and locating of GNSS satellite faults. In addition, it could also be a good reference for satellite signal gene-ration designers in signal designing and optimizing.
Keywords:global navigation satellite system (GNSS); navigation signal; distortion; ranging performance
作者簡介:
中圖分類號:TN 911.6
文獻標志碼:A
DOI:10.3969/j.issn.1001-506X.2015.07.22
基金項目:國家自然科學基金重點項目(11073022);中國科學院方向性資助項目(KJCX2-YW-T12);中科院西部博士專項資助項目(2013BS25);衛星導航與定位教育部重點實驗室(B類)開放基金資助課題
收稿日期:2014-05-19;修回日期:2014-10-30;網絡優先出版日期:2015-01-06。
