基于時鐘頻漂檢驗的衛星導航欺騙識別算法
2016-01-27 08:35:25胡彥逢曹可勁邊少鋒
系統工程與電子技術 2015年7期
胡彥逢, 曹可勁, 邊少鋒, 李 豹, 葉 鑫
(海軍工程大學導航工程系, 湖北 武漢 430033)
?
基于時鐘頻漂檢驗的衛星導航欺騙識別算法
胡彥逢, 曹可勁, 邊少鋒, 李豹, 葉鑫
(海軍工程大學導航工程系, 湖北 武漢 430033)
摘要:通過分析欺騙信號對目標接收機時鐘頻漂的影響,建立被欺騙目標接收機在勻速圓周運動條件下的時鐘頻漂模型,將其與單位余弦函數進行圓相關,通過檢測歸一化相關值可以成功實現對欺騙干擾信號的檢測,同時有效避免了虛警的發生;通過對相關相位及相關峰值分析處理可以解算出欺騙信號的方位角及仰角,仿真表明對方位角和仰角的估計誤差在1°以內。該算法可行性較強,具有重要的理論價值和應用價值。
關鍵詞:衛星導航接收機;欺騙干擾檢測;時鐘頻漂;勻速圓周運動;方位識別
0引言
目前,衛星導航系統(global navigation satellite system, GNSS)的應用已經遍布社會的各個角落,給我們的生活提供了巨大的便利,社會對其具有很強的依賴性。由于GNSS易受干擾的特點使得其安全性受到巨大的威脅[1-4]。
干擾模式可以分為壓制干擾和欺騙干擾,而欺騙干擾相對與壓制干擾在隱蔽性等方面具有特有的優勢使其威脅性更大,必須采取抗欺騙措施進行有效應對。國內外針對欺騙與抗欺騙技術的研究起步較晚,目前抗欺騙措施包括信號加密[5-6]、信噪比跳變檢測[7]、慣導信息輔助檢測[8-9]、碼和載波一致性檢測[10]、多天線相位到達檢測[11]等方法,但大多是對欺騙的檢測鮮有涉及欺騙信號的反向定位算法[12]。
本文分析了欺騙信號對目標接收機時鐘頻漂影響,使接收機進行勻速圓周運動,將時鐘頻漂與單位余弦函數進行一個周期的圓相關,該算法可以實現對欺騙信號有效檢測的同時,確定欺騙所處的方位角和仰角,最后通過仿真驗證了結論的正確性。
1多普勒測速原理
原始多普勒頻移測速是一種相對精確的測速方法,在衛導航領域應用十分廣泛,衛星導航接收機終端一般也采用多普勒測速方法[13-14]。
目標接收機天線接收到衛星i信號的載波多普勒頻移fdi定義為
(1)

根據圖1所示衛星與目標接收機之間的相對運動可得
(2)

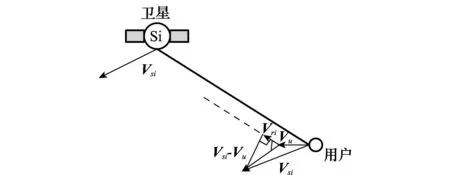
圖1 目標接收機與衛星之間相對運動
聯立式(1)和式(2),可得
(3)
這里忽略測量誤差,只考慮時鐘頻漂因素,多普勒定速方程可以表示為
(4)

2欺騙識別算法
2.1欺騙信號對接收機時鐘頻漂影響
假設欺騙信號干擾源是從同一處發射出來,干擾源位置一般保持固定,通過發射欺騙信號可以使得目標接收機定的欺騙位置和欺騙速度,但由于目標接收機與欺騙干擾源之間的相對運動在各路衛星信號上施加了相同的多普勒頻移,這共同量不會疊加到接收機時鐘頻漂上,引起時鐘頻漂的變化,而變化規律與運動規律有關,如圖2所示。
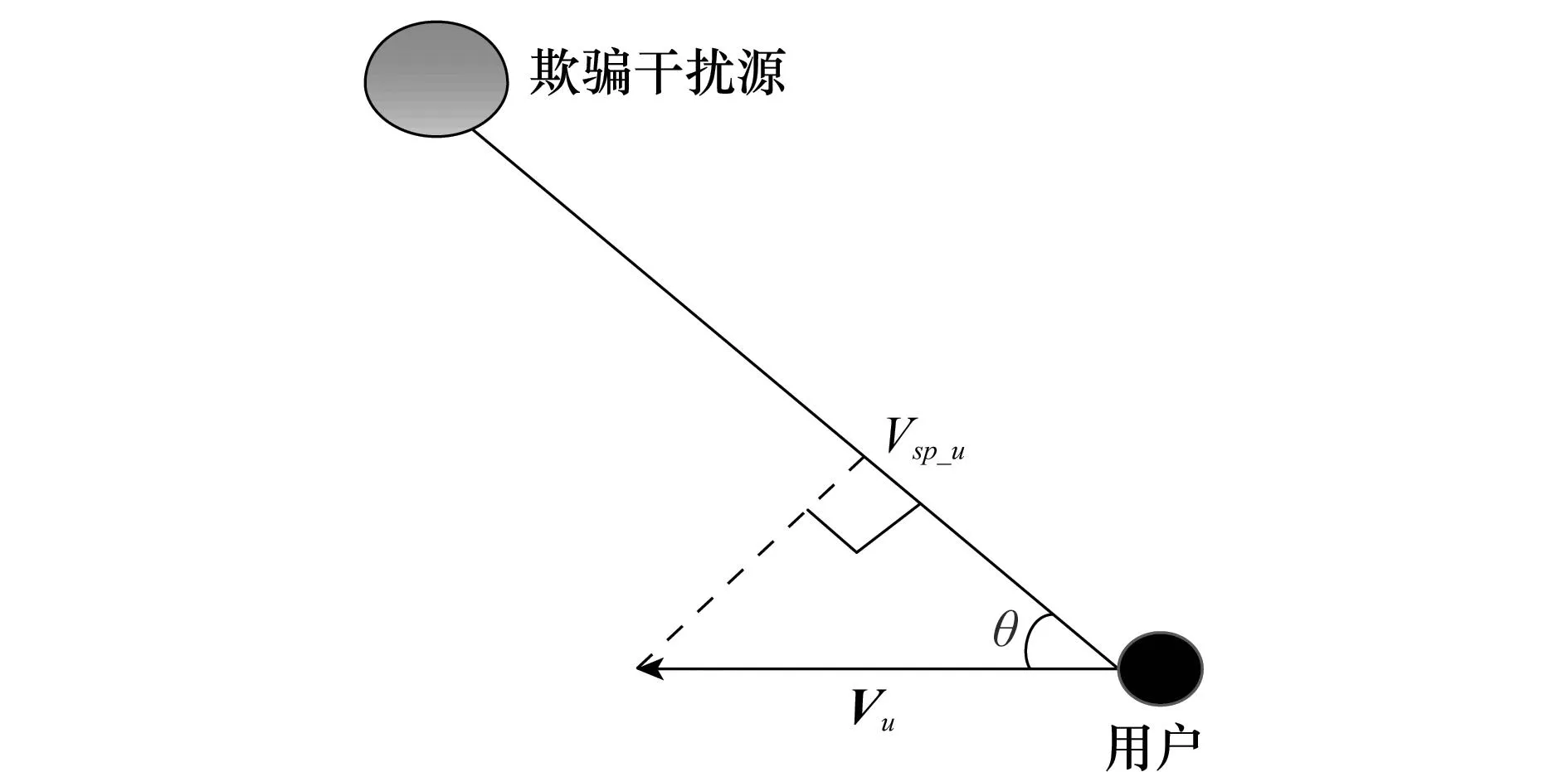
圖2 目標接收機與干擾源之間相對運動
(5)
式中,δfu表示接收機真實時鐘頻漂;θ表示目標接收機運動速度矢量和目標接收機與干擾源方向矢量的夾角;Vsp_u表示目標接收機速度矢量在目標接收機與干擾源方向矢量上的投影。
2.2勻速圓周運動模型
假設目標接收機以O點為中心R為半徑做水平勻速圓周運動,角速度為w。假設欺騙干擾源位于B點相對于A點的方位角為α,仰角為β,在圓周平面的投影點為B′,目標接收機運動速度為矢量為vu,干擾源位置不變,目標接收機位置A點不斷變化,如圖3所示。
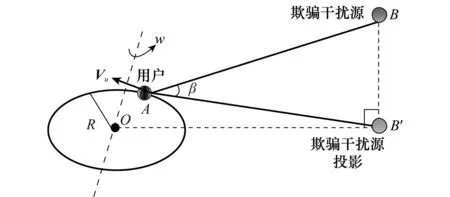
圖3 接收機勻速圓周運動
目標接收機速度矢量在AB矢量方向上的投影Vsp_u可表示為
(6)
又因為
AB=AB′+B′B
(7)
且B′B與水平圓周面垂直,綜合式(6)和式(7)可得
(8)
2.3時域圓相關算法
根據2.2節得到的結論可以得出新的投影模型如圖4所示。
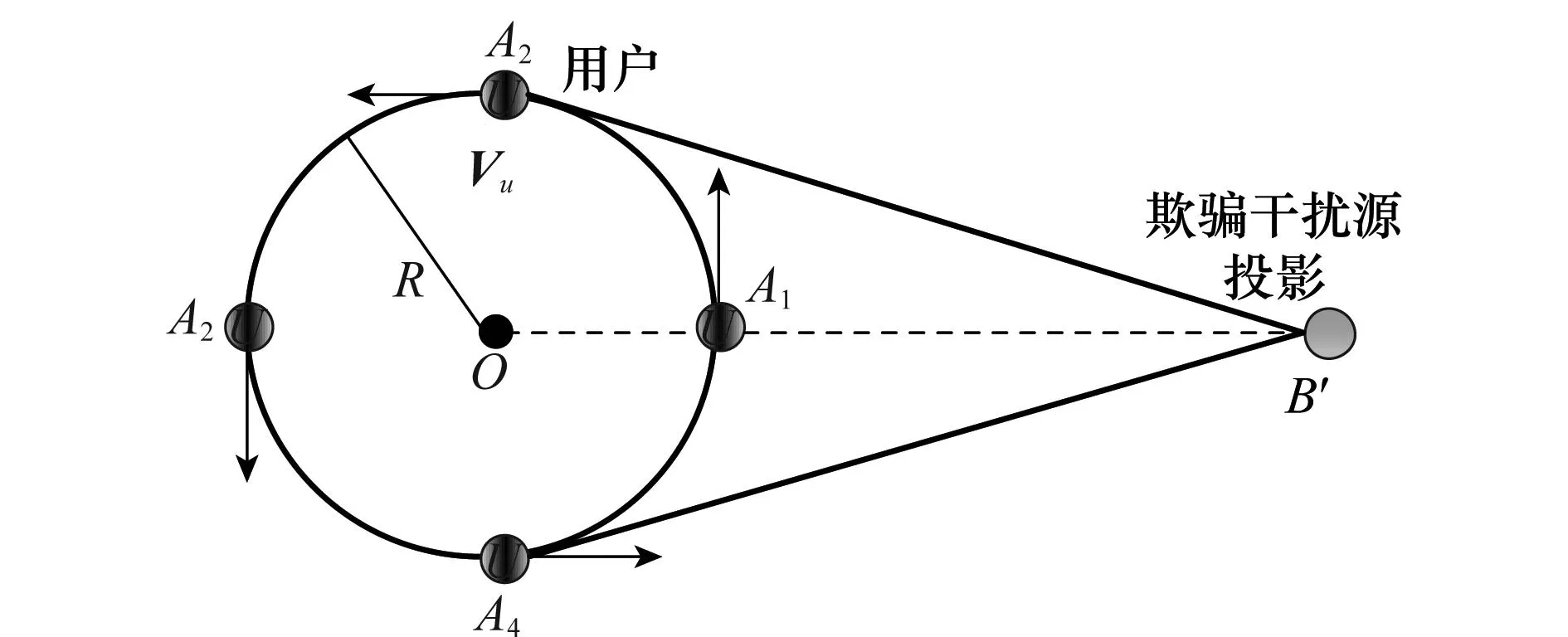
圖4 投影運動模型
當AB距離遠大于圓周運動半徑時,此時AB可以近似為固定值。Vsp_u最值出現在A2(最大正值)和A4(最小負值)處,零值出現在A1,A3處。A1,A2,A3,A4近似在圓周的四等分處。
變化趨勢分析:
(1)A1~A2:Vsp_u從零值逐漸減小到最小負值;
(2)A2~A3:Vsp_u從最小負值逐漸增大到零值;
(3)A3~A4:Vsp_u逐漸從零值逐漸增大到最大正值;
(4)A4~A1:Vsp_u從最大正值逐漸減小為零。
由此可以判定Vsp_u變化趨勢近似正/余弦,周期與目標接收機圓周運動周期相同。假設時鐘頻漂輸出值的采樣頻率為fs,則整個圓周采樣點數N為
(9)
為驗證時鐘頻漂的正弦變化特性,這里采用時域圓相關方法[15],接收機時鐘頻漂輸出采樣值與單位余弦函數進行相關。
(10)
式(10)分為兩部分,一部分是接收機真實時鐘頻漂與單位余弦函數的相關值,另一部分是目標接收機運動產生的多普勒與正弦函數的相關值。接收機鐘差與余弦函數相關程度很低,一個周期圓相關值接近零,而接收機自身圓周運動產生的鐘漂接近正/余弦函數,與單位余弦函數進行一個周期圓相關,出現相關峰。相關峰大小與速率Vu、AB′及仰角β有關,Vu越大,β越小,相關峰值越大;而水平投影AB′長度,Vsp_u變化趨勢就越逼近正/余弦函數,與單位余弦函數的相關程度也就越大,相關峰值越大。
2.4欺騙檢測與位置鎖定
相關值z(n)的大小與N及Vu有關,為了檢測方便,這里將將式(10)進行歸一化得
(11)
由于接收機真實頻漂相關值很低,此時zo(n)的取值范圍近似為[-cos(β),cos(β)]。檢測門限λ(模值)可以根據實際情況進行設置,當檢測量超過范圍[-λ,λ]時,系統報警提示有欺騙存在,進而進入欺騙位置鎖定階段。
當歸一化相關值zo(n)為零時,n為Nzero,這里令目標接收機初始旋轉值為零方位角,則干擾源相對目標接收機的方位角α(弧度)為
(12)
由于在一個周期內Nzero有兩個零值,那么對應的α也就有兩種可能取值,而干擾源對應的方位角是zo(n)由負值-零-正值時的取值Nzero。
則仰角β為
(13)
由于反余弦函數關于x軸對稱,仰角的取值有正負兩種情況,這可以根據實際情況判斷欺騙干擾源的仰角(一般欺騙干擾源位置位于比較高的位置,仰角為正值,但當目標接收機位于很高的位置時,如高空飛行器,欺騙信號源仰角可能為負值)。
3仿真驗證
仿真條件:目標接收機速率Vu=1 m/s,逆時針繞圓心O做半徑為R=1 m的勻速圓周運動;欺騙干擾源相對目標接收機的位置方位角為5π/6,仰角π/3,距離L,采樣頻率fs=400 Hz,則旋轉一周采樣點數N=2 513。
3.1正/余弦函數逼近條件驗證
當L較大時(遠大于R),載波多普勒變化趨勢逼近正弦。當L=3 m,4 m,20 m,200 m時,觀察Vsp_u的變化趨勢,采樣長度2周期。
如圖5所示,隨著L的增大,Vsp_u變化趨勢逐漸逼近正弦,L=20 m和L=200 m的Vsp_u差異已經很小,這時候可以認為當L>20 m時(投影長度>10 m時)正弦變化。現實中欺騙干擾源距離目標接收機的水平距離(投影距離)在50 m以上,是符合正/余弦逼近條件的。
圖5 Vsp_u隨L的變化趨勢
3.2時域圓相關算法仿真
假設接收機自身時鐘頻漂為方差為0.5均值為0.1 m的高斯噪聲,則L=20 m時,考慮接收機自身時鐘頻漂影響時,接收欺騙信號得到的時鐘頻漂變化趨勢如圖6所示。
圖6 真實/欺騙時鐘頻漂變化趨勢
目標接收機勻速圓周運動引起的時鐘頻漂值疊加到真實時鐘頻漂值上,會出現很多毛刺,很難直接判斷準確相位值。
觀察真實信號時的接收機時鐘頻漂與單位余弦函數的一個周期內的圓相關輸出和被欺騙條件下接收機時鐘頻漂與單位余弦函數的一個周期內的圓相關輸出變化情況,欺騙檢測門限λ設置為0.1,即相關輸出超過范圍[-1,1]時提示存在欺騙干擾。
由圖7可知,真實信號時鐘頻漂圓相關值一直處于較低的水平(遠低于門限0.1 m),而欺騙信號時鐘頻漂圓相關輸出絕大部分超過門限,可以檢測出來。
圖7 欺騙圓相關檢測
zo(n)由負值過渡到正值的臨界點Nzero=215,可得欺騙信號方位角α≈329.2°,圓相關輸出最大值|zo(n)|max≈0.502 5,則仰角β≈±59.9°,方位角誤差為0.8°,仰角誤差為0.1°。
4結論
本文分析總結了欺騙信號引起的接收機解算的時鐘頻漂變化規律,建立勻速圓周運動時鐘頻漂正/余弦函數逼近模型,通過歸一化圓相關進行相關檢驗,可以實現對欺騙信號的有效識別,且有效避免了虛警的發生,此外根據相關相位和相關峰值信息可以實現對欺騙信號源相對目標接收機的仰角和方位角進行準確的估計,估計誤差控制在1°以內。本文欺騙檢測以及方位角、仰角識別的抗欺騙方法模型簡單,可行性強,具有重要的理論價值和實際應用價值。
參考文獻:
[1] Volpe J A. Vulnerability assessment of the transportation infrastructure relying on the global positioning system[R]. Washington: National Transportation Systems Center, 2001.
[2] Humphreys T E, Ledvina B M, Psiaki M L, et al. Assessing the spoofing threat: development of a portable GPS civilian spoofer[C]∥Proc.oftheInstituteofNavigationGNSSInternationalTechnicalMeetingoftheSatelliteDivision,2008:55-56.
[3] Wesson K, Shepard D, Humphreys T. Straight talk on anti-spoofing: securing the future of PNT[J].GPSWorld,2012,23(1):32-34.
[4] Lü H L, Zhai J Y, Wang W. The spoofing threat and anti-spoofing measurements analysis for satellite navigation receiver[C]∥Proc.ofthe4thChineseSatelliteNavigationConference, 2013.(呂紅麗,翟建勇,王偉. 衛導接收機欺騙干擾威脅和反欺騙措施分析[C]∥第四屆中國衛星導航學術年,2013.)
[5] Lo S, De Lorenzo D, Enge P, et al. Signal authentication: a secure civil GNSS for today[J].InsideGNSS,2009,4(5):30-39.
[6] Savasta S, Presti L L, Dovis F, et al. Trustworthiness GNSS signal validation by a time-frequency approach[C]∥Proc.ofthe22ndInternationalTechnicalMeetingoftheSatelliteDivisionoftheInstituteofNavigation, 2001: 66-75.
[7] Jafarnia Jahromi A, Broumandan A, Nielsen J, et al. GPS spoofer countermeasure effectiveness based on signal strength, noise power, and C/N0measurements[J].InternationalJournalofSatelliteCommunicationsandNetworking,2012,30(4):181-191.
[8] White N A, Maybeck P S, DeVilbiss S L. Detection of interference/jamming and spoofing in a DGPS-aided inertial system[J].IEEETrans.onAerospaceandElectronicSystems, 1998, 34(4): 1208-1217.
[9] Li S H, Liu Y, Zhang H S, et al. Inertial measurements aided GNSS spoofing detection technique[J].JournalofChineseInertialTechnology,2013,21(3):336-340.(李四海,劉洋,張會鎖,等.慣性信息輔助的衛星導航欺騙檢測技術[J].中國慣性技術學報,2013,21(3):336-340.)
[10] Jafarnia-Jahromi A, Lin T, Broumandan A, et al. Detection and mitigation of spoofing attacks on a vector based tracking GPS receiver[C]∥Proc.oftheInternationalTechnicalMe-etingoftheInstituteofNavigation, 2012:1-11.
[11] Montgomery P Y, Humphreys T E, Ledvina B M. Receiver-autonomous spoofing detection: experimental results of a multi-antenna receiver defense against a portable civil GPS spoofer[C]∥Proc.oftheInstituteofNavigationInternationalTechnicalMeeting, 2009.
[12] Huang L, Tang X M, Wang F X. Anti-spoofing techniques for GNSS receiver[J].GeomaticsandInformationScienceofWuhanUniversity, 2011, 36(11): 1344-1347.(黃龍, 唐小妹, 王飛雪. 衛星導航接收機抗欺騙干擾方法研究[J].武漢大學學報信息科學版, 2011, 36(11): 1344-1347.)
[13] Xie G.PrinciplesofGPSandreceiverdesign[M]. Beijing: Publishing House of Electronics Industry, 2009:120-122.(謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:120-122.)
[14] Zhang H S, Gao G G, Kou L, et al. Deceptive jamming technology of GPS based on the track induction method[J].JournalofProjectiles,Rockets,MissilesandGuidance, 2013,33(3):149-152.(張會鎖,高關根,寇磊,等.利用軌跡誘導的欺騙式GPS干擾技術研究[J].彈箭與制導學報,2013,33(3):149-152.)
[15] Hu G S.Digitalsignalprocessing:theory,algorithmsandimplementation[M].Beijing:Tsinghua University Press,2003:33-38.(胡廣書.數字信號處理:理論,算法與實現[M].北京:清華大學出版社,2003:33-38.)
胡彥逢(1990-),男,博士研究生,主要研究方向為衛星導航技術及應用。
E-mail:daohang_yanfeng@163.com
曹可勁(1978-),男,副教授,碩士研究生導師,博士,主要研究方向為衛星導航技術及應用。
E-mail:cao_kejin@163.com
邊少鋒(1961-),男,教授,博士研究生導師,博士,主要研究方向為地球重力場確定、精密定位技術和衛星導航技術及應用。
E-mail:sfbian@sina.com
李豹(1986-),男,講師,博士,主要研究方向為衛星導航技術及應用。
E-mail:oabeel@163.com
葉鑫(1990-),男,碩士研究生,主要研究方向為組合導航技術。
E-mail:yexinhandsome@qq.com

網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141209.0958.008.html
GNSS spoofing detection algorithm based on
clock frequency drift monitoring
HU Yan-feng, CAO Ke-jin, BIAN Shao-feng, LI Bao, YE Xin
(DepartmentofNavigationEngineering,NavalUniversityofEngineering,Wuhan430033,China)
Abstract:Through the analysis of the influence of deception signals on the target receiver clock frequency drift, a receiver clock frequency drift model is established in uniform circular motion when the target receiver is cheated. Then the correlation values between clock frequency drift and cosine function are calculated. By monitoring the normalized circle correlation values we can successfully detect deception jamming signals, and effectively prevent the occurrence of a false alarm at the same time. Through analyzing related peak phase and related processing calculated we can get the azimuth and elevation angles of disturbing source. Simulation results show that the azimuth and elevation angle estimation error is within 1°. This algorithm is very feasible, and has very important theoretical and practical values.
Keywords:satellite navigation receiver; deception detection; clock frequency drift; uniform circular motion; orientation identification
作者簡介:
中圖分類號:TN 914.42
文獻標志碼:A
DOI:10.3969/j.issn.1001-506X.2015.07.24
基金項目:國家自然科學基金(41274013)資助課題
收稿日期:2014-07-18;修回日期:2014-10-31;網絡優先出版日期:2014-12-09。
