偏微分高程圖環境蟻群算法的三維路徑規劃
2016-01-27 08:06:23肖秦琨羅藝闖
系統工程與電子技術 2015年7期
肖秦琨, 王 弋, 羅藝闖
(西安工業大學電子信息工程學院, 陜西 西安 710021)
?
偏微分高程圖環境蟻群算法的三維路徑規劃
肖秦琨, 王弋, 羅藝闖
(西安工業大學電子信息工程學院, 陜西 西安 710021)
摘要:針對在三維空間路徑規劃中建模與避障問題,提出了一種新的在偏微分高程建模環境下蟻群算法的三維路徑規劃方法。首先,利用抽象建模和高程建模方法分別構建三維空間環境,并用偏微分對高程環境進行最優數據提取,在此基礎上利用高程數學建模方法進行三維空間重建,最終形成偏微分高程環境。其次,首次將種群對于環境的最佳適應度值作為目標函數評判蟻群尋找最優路徑的決策能力。最后,在不同的建模環境中應用蟻群算法進行路徑尋優,輸出最優路徑。通過對仿真結果和實驗數據分析,驗證了所提方法的有效性和正確性。
關鍵詞:偏微分高程建模建模; 蟻群算法; 抽象建模; 三維路徑規劃; 建模與避障
0引言
三維路徑規劃的建模方法和路徑規劃算法是機器人野外作業面臨的關鍵技術難題[1-3],針對這個問題,許多學者進行了深入的探索,并取得了一系列研究成果[4-5]。
為了解決機器人在三維空間環境中路徑規劃問題,一些研究者提出了高程建模思想[6-7]。核心理論是利用二維柵格先將三維空間環境數據離散化,再將三維空間環境數據所對應的2.5維地形高度信息存入每一個相對應二維柵格中,進而整個三維空間環境的地形特征將被存儲在各個區域中。文獻[8-9]通過對三維空間環境中較大曲率的地形信息數據點進行提取,并對連續多幅的三維空間場景進行掃描匹配,最終將多足機器人所在的三維空間環境用高程圖進行表示。文獻[10]在高程建模的三維空間環境中,提出了通過概率定位算法進行行星探測器的設計。文獻[11]將市區路面、陸島以及空間環境中的障礙物用高程圖進行表示,然后對其進行檢測。文獻[12]提出一種基于拓撲高程模型的三維環境建模方法,進行路徑規劃。
蟻群算法[13]是受螞蟻的集體覓食行為及在覓食過程中具有其獨特優勢的啟示,提出的一種模仿蟻群覓食過程的算法。通過實驗觀察發現,盡管個體螞蟻在覓食過程中的覓食行為比較簡單,但是蟻群卻能夠在實時復雜多變的外部環境中將其所具有的群體行為能力出色地發揮出來,它們不但能通過蟻群所具有的獨特的行為能力——將大于自身大小成十上百倍的食物安全完整地送回自己的巢穴,而且蟻群一旦在覓食途中遇到障礙物,蟻群便能夠很迅速地重新找到一條能夠到達目標點的最優路徑。
在通過對高程建模以及蟻群算法的研究基礎上,本文提出一種結合偏微分高程建模與蟻群算法的三維路徑規劃方法,該方法的優勢在于:①能夠將在抽象建模和高程建模方法中出現冗余的空間數據通過偏微分高程數學方法進行極值化處理,從而能夠對三維空間環境的主要信息進行更簡單明了地表述。②與抽象建模方法、高程建模方法相比,通過對蟻群適度值的計算并將所獲取的數據進行二次曲線擬合輸出,以此能夠顯示出在偏微分高程環境下,蟻群在進行路徑規劃過程中具有更強的目標決策能力,以及對外部環境的適應能力,并且輸出的路徑更為安全合理,避障效果更好。③通過計時函數對于時間資源消耗的計算,可以得出在偏微分高程建模方法下蟻群算法的所消耗的時間資源最少。
1三維空間抽象建模
在三維空間地圖中建立以左下角的頂點為坐標原點O,經度、緯度增加的方向分別為x軸、y軸,空間高度增加的方向為z軸的三維空間坐標系。在所建立的三維空間坐標系中取點O為坐標原點,ON為x軸所對應經度增加方向上的最大長度,OO′為y軸所對應緯度增加方向上的最大長度,OP為z軸所對應空間高度增加方向上的最大長度。最終,形成三維空間立方體區域OPMN-O′P′M′N′,即蟻群算法將要在該三維空間區域內進行路徑規劃[14]。
當三維空間路徑規劃區域構建起來之后,從所建立的三維空間區域OPMN-O′P′M′N′中,將該三維空間區域利用等分方法對三維空間路徑規劃時所需的搜索數據點進行提取。先將三維空間區域在經度增加方向(x軸延伸方向)的最大長度ON進行n等分,得到n+1個平面Πi(i=1,2,…,n),然后再將所形成的n+1個平面沿y軸延伸方向的最大長度OP進行m等分,然后沿z軸延伸方向最大長度OO′進行l等分,最后,利用抽象建模的數學方法,求解出里面的交點,如圖1所示。

圖1 三維空間抽象建模空間圖與平面圖
通過以上步驟,立體的三維路徑規劃區域OPMN-O′P′M′N′就離散化為一個三維空間數據點的集合,而且每一個數據點都有兩個坐標與其相對應,即編號坐標q1(i,j,k) (i=0,1,…,n; j=0,1,…,m; k=0,1,…,l)和位置坐標q2(xi,yi,zi),其中,i,j,k分別為當該點當前所對應的劃分編號。蟻群算法將在通過抽象建模方法構建的三維空間環境中的這些空間數據點上進行路徑尋優,最終輸出一條從起點到目標點并且滿足某項最優路徑輸出指標的最優路徑。
為了方便解決在構建的三維空間進行路徑規劃,本文設定坐標軸原點為路徑規劃區域內的最低點0,并將該點作為對應的平面環境視為海平面高度,設定高度為600 m的平面為主要進行路徑規劃陸地平面;在z軸延伸方向上,將高度區域(0,2 km),以100 m為高度差進行等分;在(x,y)平面內,分別在x軸和y軸的延伸方向上,將平面區域(21 km,21 km)以1 km為距離差進行等分。首先通過抽象建模方法建立一個區域跨度為 21 km×21 km×2 km的三維空間不平坦路面環境的仿真圖。其次,在上述所建立的三維空間區域內,保持海平面高度和主要進行路徑規劃的陸地平面不變,將在x軸延伸方向上(5 km,9 km)平面范圍內,所對應的z軸延伸方向上的高度值設置為600 m;在y軸延伸方向上(3 km,19 km)平面范圍內,所對應的z軸延伸方向上的高度值設置為600 m,最終利用抽象建模方法構建一條三維空間平坦路面,如圖2、圖3所示。

圖2 抽象建模三維空間不平坦路面
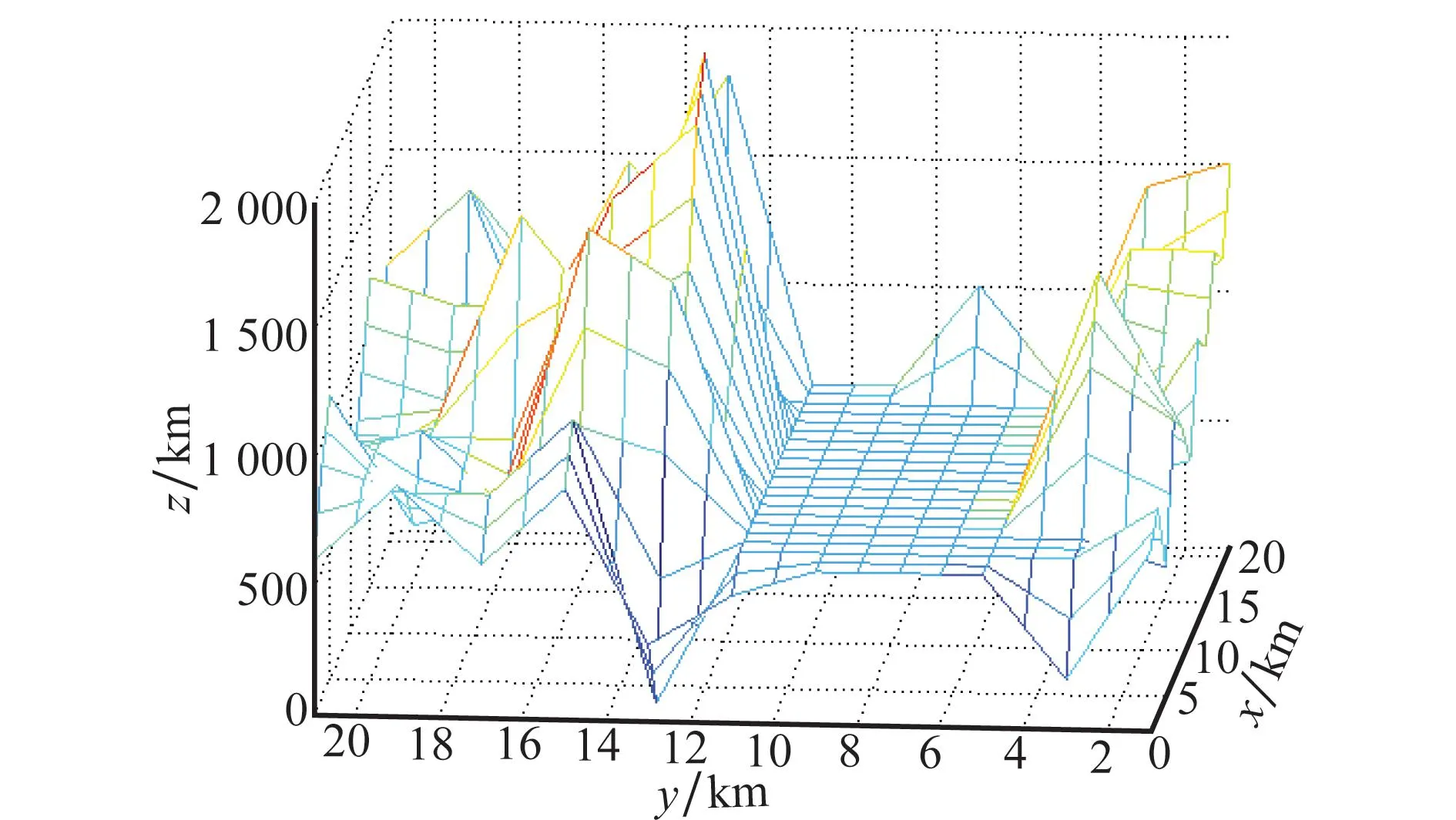
圖3 抽象建模三維空間平坦路面
2三維空間高程與偏微分高程建模
2.1三維空間高程建模
2.1.1場景柵格劃分

假設設定xy平面內所有通過激光采集的數據點的分布服從相互獨立的正態分布f(x,y)~(μ,σ2):
(1)

(2)
式中,xc,yc是所采集空間區域內激光數據點的期望值。那么通過某一激光數據點ri對與其相應的柵格Cij的影響程度的計算,則將該激光數據點標定為該柵格內與之相對應的第h個數據點。最后通過大量的參數賦值運算,可以計算出每一組通過激光采集到的數據點ri={r1,r2,…,rn}對與其相對應的柵格影響度μh={μ1,μ2,…,μn}。將影響程度大于閾值μthreshold的點存入柵格中,便完成了將三維空間激光數據點存入與之相對應的柵格的過程。通過對激光點ri所在柵格cij中對應的μ進行規一化處理,可知柵格的高度值由柵格中所有激光點高度的加權平均得出,即
(3)
2.1.2可行區域劃分
根據柵格內激光數據點在高度方向上的分布情況,可以計算每個柵格Cij的平均高度:
(4)
從而可以通過計算每兩個柵格之間的高度差,以此來獲得在某一激光數據采集區域內道路的平坦程度并判斷這一區域是否可行。判斷某一區域是否可行,柵格間的高度差需滿足公式:
(5)
式中,Hij為柵格Cij所在區域的平均高度;Hthresh為根據無人地面自主戰車自身情況所設定的閾值。此過程不對鄰域空閑柵格進行計算。
根據以上公式,利用高程建模方法形成如圖4所示的高程環境。
圖4 高程建模環境圖
2.2三維空間偏微分高程建模
由式(2)和式(3)可以獲取某一時間點在高程建模環境內通過激光采集的空間點數據,然后通過偏導求極值的數學計算,利用偏微分高程數學方法進行空間數據采集,以獲取最優數據,計算過程如下:
(6)
(7)
--------------------式中
則可以根據極值公式,求得最優解進而可以求出最優的數據集合。偏微分高程建模環境的可行區域劃分根據柵格內激光點在高度方向上的分布情況,可以計算每個柵格Cij的平均高度:
(8)
從而可以通過計算每兩個柵格之間的高度差,以此來獲得在某一激光數據采集區域內道路的平坦程度并判斷這一區域是否可行。判斷某一區域是否可行,柵格間的高度差需滿足公式:
(9)
式中,Hij為柵格Cij所在區域的平均高度;Hthresh為根據機器人自身情況所設定的閾值。此過程不對鄰域空閑柵格進行計算。
根據以上公式,利用偏微分高程圖建模方法形成如圖5所示的偏微分高程圖環境。
3蟻群算法的三維空間路徑規劃
在上述3種不同的建模方法所建立的三維空間環境中,應用蟻群算法進行路徑規劃。
步驟 1蟻群通過啟發函數來計算到達下一個搜索點的概率,并判斷該點是否可行。啟發函數為
(10)
式中,D(i,j,k)w1為螞蟻移動的兩個搜索點之間距離,促使其選擇與當前所在節點距離較近的搜索點;S(i,j,k)w2為安全因子,當搜索節點無法到達時,該值為0,促使其選擇可以達到的搜索點;Q(i,j,k)w3為下一點到終點的距離長度,促使其選擇到目標點距離更近的點;w1、w2、w3為系數,代表上述各因素的重要程度。

圖5 偏微分高程建模環境圖
螞蟻在平面Πi上的當前點pi選擇平面Πi+1上下一個點pi+1:
(11)
式中,τa+1,u,v為平面Πi+1上點p(i+1,u,v)的信息素值。
步驟 2信息素更新:蟻群算法將三維環境搜索空間的散點wi={w1,w2,…,wn}作為節點進行搜索。
信息素的更新包括局部更新和全局更新兩部分,局部更新能夠使螞蟻對未經過搜索的節點的搜索概率增加,以達到全局搜索的目的。局部信息素的更新會隨著螞蟻對搜索點搜索同時進行更新,信息素更新公式為
(12)
式中,τijk為點(i,j,k)上所帶的信息素值;ξ為信息素的衰減系數。
全局更新是指當螞蟻對一條路上所有數據點完成搜索以后,將所搜索路徑的長度設定為評價值,從該次蟻群所輸出的所有路徑中,選擇其中搜索路徑長度最短路徑,增加搜索路徑長度最短路徑上各搜索點的信息素值,信息素更新公式為
(13)
式中,length(m)為第m只螞蟻移動過的距離長度;ρ為信息素更新系數;K為常量系數。Δτijk為兩點之間留下的殘留信息素濃度。
當完成一次全局路徑規劃后,蟻群就會在路徑集合中選擇出一條最優路經。
步驟 3通過蟻群在不同建模環境適應度值的計算與提取輸出最優路徑。蟻群對三維空間各個路徑搜索點適應度值大小的選擇,體現了蟻群尋找最優路徑時的決策能力,適應度值越小,說明選擇該條路徑越合理。當蟻群經過每一個搜索點時,螞蟻會保存該搜索點所對應適應度值,蟻群對三維環境的適應度值計算公式為
(14)
式中,D(i,j)表示蟻群通過兩個搜索點時路徑的長度;H(i,j,k)為該搜索點所對應空間的高度值。
當蟻群算法在不同的建模環境下進行路徑規劃時并且經過若干次迭代后,輸出最優路徑(即最佳適應度值所對應的路徑)。適應度值越小,表明蟻群的決策能力越強,輸出的路徑越安全合理。
4實驗結果及數據分析
在Matlab環境下采用計時函數(計時函數可以定量計算完成制定程序所消耗的時間資源)計算出蟻群從相同起點到目標點在不同建模環境下所消耗的時間資源。通過對適應度值(適應度值越小,路徑規劃時的決策能力越強、避障效果更好,輸出的最優路徑更為合理)的計算,并將所有最佳適應度值提取利用最小二乘法曲線擬合的輸出,從曲線圖中可以體現出蟻群在最優路徑尋找過程中的決策能力和避障效果。
4.1三維路徑規劃步驟及仿真結果
在本次實驗中取不平坦路面環境,平坦路面環境,高程建模不平坦路面環境,高程建模平坦路面環境,偏微分高程建模不平坦路面環境和偏微分高程平坦路面等6種不同建模環境的起點為starty=10,starth=3;終點為endy=9,endh=3;蟻群算法的初始參數設置為:w1=3,w2=1,w3=2,K=120,空間離散點n=21,螞蟻移動步長m=1,螞蟻在(x,y)平面內進行一次尋優過程的最大縱向和橫向移動距離為2,迭代次數為100次。在不同的種群數量和信息素參數下進行試驗,①信息素ρ=0.9,種群數量PopNumber=10;②信息素ρ=0.7,種群數量PopNumber=10;③信息素ρ=0.5,種群數量PopNumber=10。
4.1.1仿真結果
圖6~圖11分別為在參數ρ=0.9,種群數量PopNumber=10時,抽象建模不平坦路面(見圖6)、抽象建模平坦路面(見圖7)、高程建模不平坦路面(見圖8)、高程建模平坦路面(見圖9)、偏微分高程建模不平坦路面(見圖10)、偏微分高程建模平坦路面(見圖11)中所輸出的最優路徑。

圖6 抽象建模不平坦路面路徑規劃圖
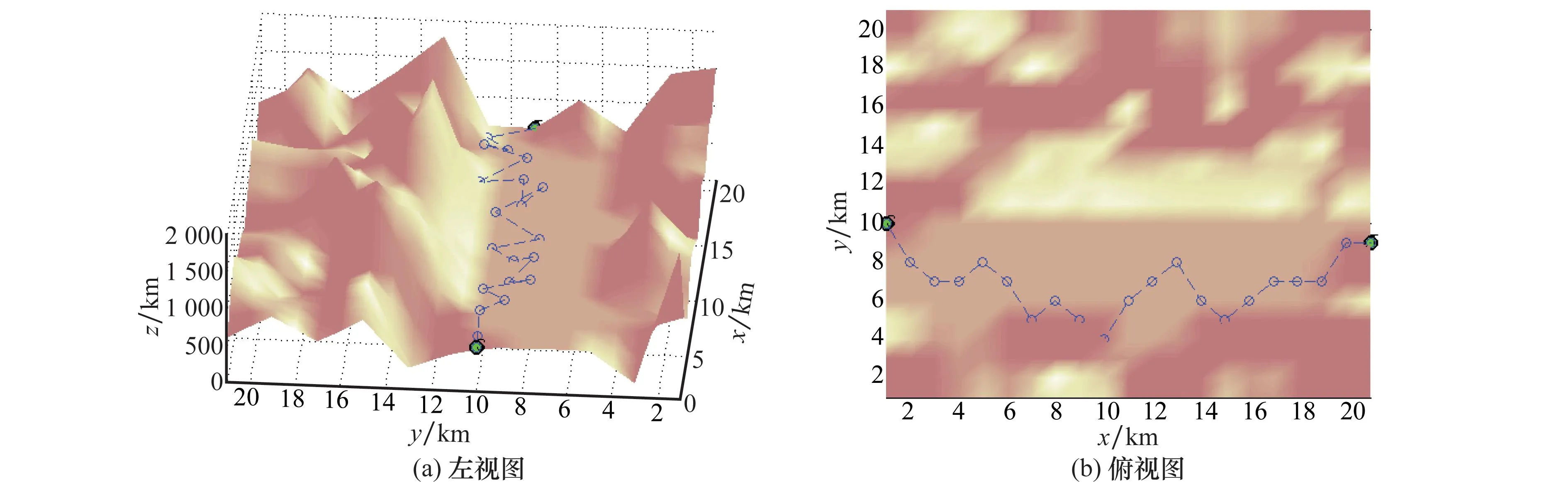
圖7 抽象建模環境平坦路面路徑規劃圖
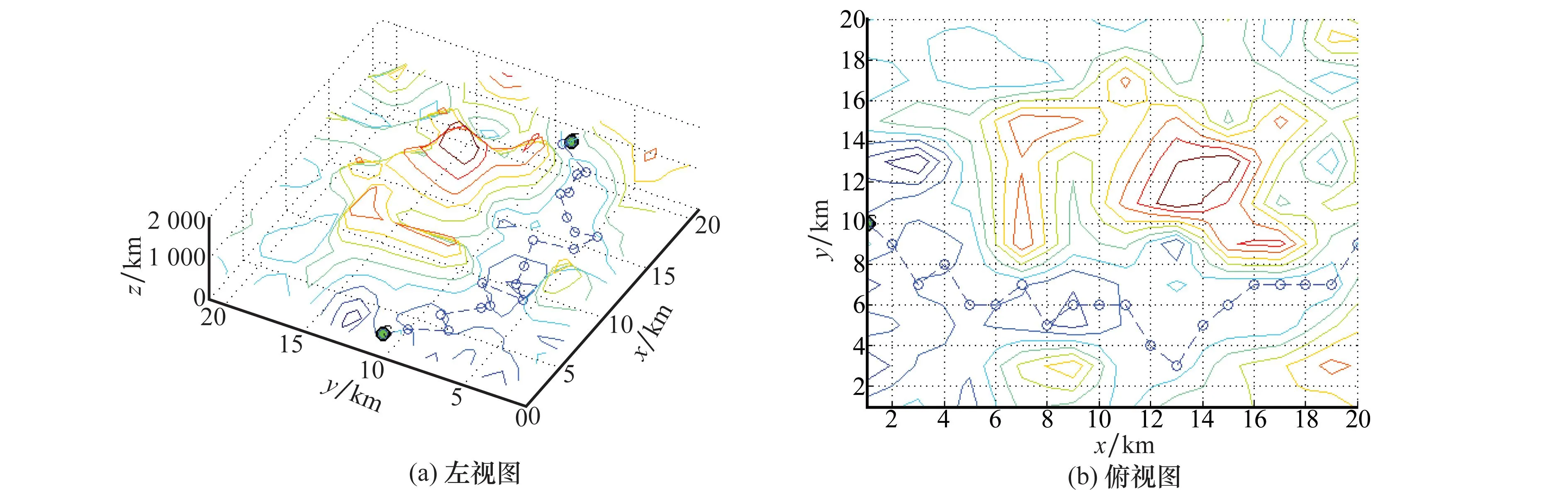
圖8 高程建模環境不平坦路面路徑規劃圖

圖9 高程建模環境平坦路面路徑規劃

圖10 偏微分高程建模環境不平坦路面路徑規劃圖

圖11 偏微分高程建模環境平坦路面路徑規劃
圖12~圖17分別為在參數ρ=0.7,種群數量PopNumber=10時,抽象建模不平坦路面(見圖12)、抽象建模平坦路面(見圖13)、高程建模不平坦路面(見圖14)、高程建模平坦路面(見圖15)、偏微分高程建模不平坦路面(見圖16)、偏微分高程建模平坦路面(見圖17)中所輸出的最優路徑。

圖12 抽象建模環境不平坦路面路徑規劃圖

圖13 抽象建模環境平坦路面路徑規劃圖

圖14 抽象建模環境不平坦路面路徑規劃圖

圖15 高程建模環境平坦路面路徑規劃圖

圖16 偏微分高程建模環境不平坦路面路徑規劃圖

圖17 偏微分高程建模環境平坦路面路徑規劃圖
圖18~圖23分別為在參數ρ=0.5,種群數量PopNumber=10時,抽象建模不平坦路面(見圖18)、抽象建模平坦路面(見圖19)、高程建模不平坦路面(見圖20)、高程建模平坦路面(見圖21)、偏微分高程建模不平坦路面(見圖22)、偏微分高程建模平坦路面(見圖23)中所輸出的最優路徑。

圖18 抽象建模環境不平坦路面路徑規劃圖
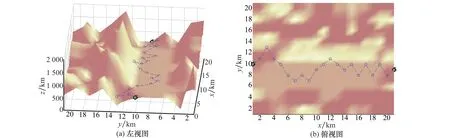
圖19 抽象建模環境平坦路面路徑規劃圖

圖20 高程建模環境不平坦路面路徑規劃圖

圖21 高程建模環境平坦路面路徑規劃圖
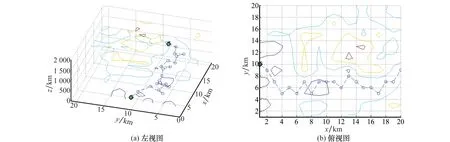
圖22 偏微分高程建模環境不平坦路面路徑規劃圖

圖23 偏微分高程建模環境平坦路面路徑規劃圖
4.1.2實驗數據
在6種不同的路面環境中進行路徑規劃時,將最佳適應度值作為目標函數,并利用時間函數計算在上述不同建模環境的路徑規劃下所消耗的時間資源,驗證了所提方法的有效性和可行性。實驗數據如圖24~圖26和表1所示。

圖24 種群適應曲線(ρ=0.9)

圖25 種群適應曲線(ρ=0.7)

圖26 種群適應曲線(ρ=0.5)
4.2實驗數據分析
首先,通過表1實驗數據的對比,可以看出在信息素大小不同,蟻群數量相同的情況下,偏微分高程環境中進行路徑規劃是所消耗的時間資源要比在抽象建模和高程建模環境下少。并且實驗數據也可以得出信息素揮發程度的大小對于路徑規劃結果會產生重要的影響。通過對大量相關資料研究與分析,當ρ=0.5時,蟻群算法在二維平面環境下,找尋最優路徑時所消耗的時間最短。但通過對本文的實驗數據分析可知,當ρ=0.9時,蟻群算法在抽象建模環境中尋找到最優路徑耗時最短,而當ρ=0.7,蟻群算法在高程建模和偏微分高程建模環境下,尋找到最優路徑所用時間最少。綜上所述,在不同的建模方法所建立的三維環境中,信息素的大小會對蟻群算法的路徑規劃結果產生影響。
其次,通過圖24~26可知,種群的最佳適應度值所獲取的數據擬合曲線可知,當同種群數目、不同信息素大小時,在偏微分高程建模環境中,蟻群算法在尋找最優路徑過程中,種群的適應度值在經過若干次迭代后,所產生的適應度值最小即表明,在此過程中蟻群的適應能力最好,以及對于最優路徑選取的決策能力最強,從而使得蟻群輸出一條避障效果最好并且能夠安全到達目標點的路徑。

表1 相同種群數目、不同信息素濃度(PopNumber=10,ρ=0.9,0.7,0.5)情況下的時間資源的消耗
然而,在實驗過程中發現,在偏微分高程建模環境和高程建模環境中,蟻群在不平坦路面進行路徑尋優時所用時間比相同建模環境中平坦路面進行路徑尋優時所用的時間少。該實驗結果與當初預想的實驗結果和在抽象建模環境中不平坦路面和平坦路面所得出的實驗結果完全相反。后大量實驗對該結果進行驗證,得出此結果并不只是偶然在某一個信息素或者蟻群數量的一次路徑規劃過程中在才產生的,而是在整個建模環境中。由此可以得出一個結論:不同的建模方法或方式會對信息素的揮發程度產生影響,而信息素的揮發程度會對蟻群算法最后的尋優結果產生影響。
綜上所述,在偏微分高程建模方法下構建的三維空間場景相比于高程建模和抽象建模方法構建的三維空間場景所利用的存儲空間量小,所表達的空間環境信息更明了。所以,蟻群在尋找目標點時對環境的適應能力、目標點的決策能力更好,并且所消耗的時間更少。因此,蟻群在偏微分高程建模環境中進行三維路徑規劃時所輸出的路徑最優及避障效果更好,從而驗證了所提方法的有效性。
5結論
本文重點對三維空間環境建模和在三維空間環境建模基礎上蟻群算法的路徑規劃問題進行了研究。本文提出一種新的偏微分高程建模環境下蟻群算法的三維路徑規劃方法,該方法解決了以下問題:①將在抽象建模和高程建模方法中出現冗余的空間數據,通過對空間數據采集過程中信息數據進行偏微分的極值化處理,獲得最優空間信息數據,從而對三維空間環境的主要信息進行簡單明了的表達。②提高了蟻群在路徑規劃過程中對于環境的適應能力、尋找最優目標點的決策能力,并且在整個路徑規劃中,輸出了更為安全合理并且避障效果更好的路徑。③減少了蟻群算法在路徑規劃過程中所需要時間資源的消耗。
通過在Matlab環境下的仿真實驗的結果和數據分析,驗證了在偏微分高程建模環境下,蟻群在進行三維空間的路徑規劃時,具有更好的環境適應、決策尋優的能力,并且需要消耗的時間資源更少。此外蟻群所輸出的路徑更為安全合理,避障效果更好。
在實驗過程中發現,在復雜的完全未知的環境進行路徑規劃時,蟻群的可視點的數目,直接對其能否進行路徑規劃產生決定性的影響,所以下一步工作,將重點對蟻群算法在復雜的、完全未知的三維空間道路環境中的可視點數量與可視區域進行研究,從而完善蟻群算法在更為復雜的信息完全未知三維空間環境中進行路徑規劃研究。
參考文獻:
[1] Zhou B, Dai X Z, Han J D. Real-time 3D outdoor environment modeling for mobile robot with a laser scanner[J].Robot, 2012, 34(3):321-328.(周波,戴先中,韓建達.基于激光掃描的移動機器人3D室外環境實時建模[J].機器人,2012,34(3):321-328.)
[2] Xu A Q, Chatavut. Optimal complete terrain coverage using an unmanned aerial vehicle[C]∥Proc.oftheIEEEInternationalConferenceonRoboticsandAutomation,2011:2513-2519.
[3]Nationalresearchcouncilofthenationalacademies.Technologydevelopmentforarmyunmannedgroundvehicle[M]. Fu M Y, Wang M L, trans.Beijing: National Defense Industry Press,2008.(軍用無人地面車輛技術的發展[M].付夢印,王美玲,譯.北京:國防工業出版社,2008.)
[4] Lartigue C, Quinsat Y, Mehdi-Souzani C.Voxel-based path planning for 3D scanning of mechanical parts[J].Computer-AidedDesignandApplications,2014,11(2):220-227.
[5] Olivieri P, Birglen L, Maldague X, et al. Coverage path planning for eddy current inspection on complex aeronautical parts[J].RoboticsandComputer-IntegratedManufacturing,2014,30(3):305-314.
[6] Ye C.Borenstein J.A novel filter for terrain mapping with laser rangefinders[J].IEEETrans.onRobtics,2004,20(5):913-921.
[7] Plagemann C,Mischke S,Prentice S,et al. A Bayesian regression approach to terrain mapping and an application to legged robot locomotion[J].JournalofFieldRobotics,2009,26(10):789-811.
[8] Olson C F. Probabilistic self-localization for mobile robots[J].IEEETrans.onRoboticsandAutomation, 2000,16(1):55-66.
[9] Oniga F, Nedevschi S. Processing dense stereo data using elevation maps: road surface, trafficisle and obstacle detection[J].IEEETrans.onVehicularTechnology,2010,59(3):1172-1182.
[10] Olson C F. Probabilistic self-localization for mobile robots[J].IEEETrans.onRoboticsandAutomation,2000,16(1):55-66.
[11] Oniga F, Nedevschi S. Processing dense stereo data using elevation maps: road surface, traffic isle and obstacle detection[J].IEEETrans.onVehicularTechnology,2010,59(3):1172-1182.
[12] Yan F, Zhuang Y, Bai M, et al. 3D outdoor environment modeling and path planning based on topology-elevation model[J].ActaAutomaticaSinica,2010,36 (11):1493-1501.(閆飛,莊嚴,白明,等.基于拓撲高程模型的室外三維環境建模與路徑規劃[J].自動化學報,2010,36(11):1493-1501.)
[13] Dorigo M, Maniezzo V, Colorni A. The ant system: optimization by a colony of cooperating agents[J].IEEETrans.onSystems,ManandCybernetics,PartB:Cybernetics,1996,26(1):29-41.
[14] Shi F, Wang H, Yu L, et al. 30samplesofMATLABintelligentalgorithm[M]. Beijing:Beihang University Press,2011:229-236.(史峰,王輝,郁磊,等.MATLAB 智能算法30個案例分析[M].北京:北京航空航天大學出版社,2011:229-236.)
肖秦琨(1974-),男,教授,博士,主要研究方向為動態貝葉斯網絡及多媒體信息檢索。
E-mail:xiaoqinkun10000@163.com
E-mail:wangyi860205@126.com
羅藝闖(1987-),男,碩士,主要研究方向為模式識別。
E-mail:luoyichuang@163.com

網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141209.0119.005.html
3D path planning of ant colony algorithm using partial
differential elevation modeling
XIAO Qin-kun, Wang Yi, LUO Yi-chuang
(DepartmentofElectronicsandInformationEngineering,Xi’anTechnologicalUniversity,Xi’an710021,China)
Abstract:A novel three-dimensional (3D) path planning method of the ant colony algorithm under the partial differential elevation modeling is proposed to tackle the problem of scene modeling and obstacle avoidance. Firstly, the 3D abstract scene and elevation scene are built by their modeling respectively, and then the optimal data is extracted from the elevation scene to construct partial differential scene by using the partial differential mathematical method. Furthermore, the best fitness value of the ant colony firstly treated as objective function is employed to display the decision-making capacity of the ant colony in the 3D path planning. Finally, the ant colony algorithm is combined with abstract scene, elevation scene or the partial differential elevation scene, and the best path planning is shown out in 3D scene. Experimental results and statistics analysis show the effectiveness and validity of the proposed algorithm.
Keywords:partial differential elevation modeling; ant colony algorithm; abstract modeling; three-dimensional (3D) path planning ; modeling and obstacle avoidance
通訊作者王弋(1986-),,男,碩士研究生,主要研究方向為無人戰車野外路徑規劃。
作者簡介:
中圖分類號:V 279
文獻標志碼:A
DOI:10.3969/j.issn.1001-506X.2015.07.14
基金項目:國家自然科學基金(61271362);陜西省自然科學基金(2012JM8028);陜西省教育廳專項科研基金(12JK0510,12JK0727);中省共建-跨平臺研究項目(ZXXM01)資助課題
收稿日期:2014-04-17;修回日期:2014-10-16;網絡優先出版日期:2014-12-09。
