基于國產DSP的步進頻率綜合寬帶處理
2016-01-10 08:15:08
雷達科學與技術 2016年4期
關鍵詞:信號
(中國電子科技集團公司第三十八研究所,安徽合肥230088)
0 引言
雷達系統發射大帶寬信號可以提高自身的距離分辨能力,雷達回波經脈沖壓縮處理使得目標上多個散射點距離上可分,即雷達可以獲知目標尺寸、散射點個數、散射點間相對強弱及位置分布等信息,大大提升了雷達的目標感知能力,因而雷達具備發射大帶寬信號能力具有重要意義。與大瞬時帶寬工作體制相比,步進頻率綜合寬帶工作體制需求的瞬時帶寬小,可以在窄帶發射機、接收機條件下工作,是一種易于工程實現的大帶寬信號形式,具有巨大的工程應用優勢。但步進頻率綜合寬帶工作體制存在距離-多普勒耦合現象[1-2],對運動目標綜合成像時必須先對其精確測速再作對應的速度補償處理,使得步進頻率綜合寬信號處理包含多個流程。子脈沖調頻使得子脈沖的波形設計更加靈活[1],因而本文主要討論線性調頻 步進頻率工作體制的信號處理流程。
1 算法原理分析
1.1 頻率步進高分辨距離成像原理
頻率步進綜合寬帶的基本原理是將B=N·d F的總信號帶寬,分在N個子脈沖中分時發射出去,經過信號處理后距離分辨能力與直接發射瞬時大帶寬信號的距離分辨率相同。順序步進時載頻按d F的頻率間隔在脈沖間跳變,即由f0步進到f0+(N-1)·d F,頻率步進脈沖串信號的數學表示如下:

式中,xp(t)為子脈沖基帶信號,ban d為信號帶寬,m為脈沖串內第m個子脈沖的標識,T為脈沖重復周期,f0為起始載頻,d F為脈間頻率步進量,N為脈沖串內子脈沖個數。信號綜合總帶寬B=(N-1)d F+ban d,根據波形設計準則,一般ban d>d F[1-2],因而B≈N·d F。回波信號經過混頻、解調及后續信號處理后距離分辨率與直接發射瞬時綜合帶寬B的距離分辨率相同,即達到了合成寬帶效果,實現了距離高分辨成像。
脈沖壓縮后大尺寸目標回波信號分布在子脈沖的相鄰若干距離單元內,需要拼接每個距離單元的綜合成像結果得到大尺寸目標的完整高分辨距離像。為保證子脈沖單個距離單元的目標綜合成像結果不發生混疊,要求子脈沖距離單元大小小于步進頻率不模糊距離大小范圍,此時綜合成像結果中存在冗余部分,需要從中提取有效數據段進行拼接處理[1]。
1.2 運動目標影響
當目標運動時,假設目標作勻速運動,徑向速度為v,距離延時得到解調后的步進頻率回波數據如下:

式中,m為第m個子脈沖的標號。公式第二行的一次項使得綜合成像結果發生偏移,二次項使得綜合成像結果產生波形畸變、失真[3-4]。偏移距離為

運動目標綜合成像結果的位置較其真實位置發生偏移,而距離像拼接時要求目標在綜合成像結果中的位置與目標真實位置一致,否則距離像拼接時將發生錯誤,二次相位使得綜合成像結果失真,二者均會導致最終距離像拼接結果發生錯誤。為了消除目標運動速度對步進頻率綜合成像結果的影響,需要準確估計目標的運動速度,并構造式(2)中的一次相位、二次相位進行補償。
目標運動同樣對子脈沖產生距離走動影響[2]。一方面目標距離的變化使得多個子脈沖的脈壓結果出現距離走動現象;另一方面,由于各子脈沖載頻步進變化,運動目標的多普勒效應在各子脈沖中引起的距離偏移量不同。上述距離走動將影響最終成像結果的質量,需要依據目標速度初始估計值(一般由窄帶模式提供)完成多普勒校正和包絡對齊處理,然后再作步進頻測速處理。在測速后需要依據測速結果完成子脈沖的包絡再對齊操作,消除幀內子脈沖距離走動殘留量。
1.3 相位差分-IFFT測速算法
對目標徑向速度的估計方法可分為兩類:第一類是通過回波數據直接計算求取目標速度,如時域互相關法[3]、頻域互相關法[3]、正負調頻測速法[4]等;另一類是利用構造的評價函數在一定速度范圍搜索最大值/最小值獲得目標速度,如最小波形熵法、最小脈組誤差法[5]、最小脈組相位差分法[6]等,屬于速度搜索類。頻域互相關法測速精度高,但測速不模糊范圍小,不具有實用價值;時域互相關法測速不模糊范圍大,測速精度中等,具有較好的抗噪聲性能;速度搜索類算法的運算量大,測速精度與速度搜索步長有關,算法實時性較差。
依據兩幀回波的相位變化可以測量目標在此期間的距離走動量,即相位差分測距。目標勻速運動時兩幀步進頻率回波的多普勒效應一次、二次相位相同,兩幀回波數據共軛相乘即得到相鄰兩幀回波數據的相位差復指數信號。單散射點情況下該信號是單頻率信號,頻率與目標距離變化量對應,多散射點情況下該信號不是單頻率信號。但文獻[7]中已論證特定頻率的信號分量幅度最大,可通過IFFT實現相干積累,搜索IFFT結果模值最大值所在頻率并解算出速度估計值,稱為相位差分-IFFT測速算法,該算法屬于第一類算法。相位差分-IFFT測速算法是相干積累,具有很好的信噪比得益,抗噪聲性能良好。
相位差分-IFFT測速算法的數學表達如下:

式中,M為FFT/IFFT的點數。y′1,y′2分別對應前一幀、當前幀脈間頻率步進回波補零后的序列。兩幀頻率步進回波補零、共軛相乘再作IFFT運算得到Z,由Z模值最大值的位置解算出兩幀時間間隔內目標的距離走動量實現速度估計。由式(4)可知,在測速前是否作相位補償并不影響Z,即不影響測速結果。與文獻[3]中的時域互相關法相比,相位差分-IFFT測速算法省略了兩幀回波數據的成像運算,算法效率更高。
為了提高測速算法的抗噪聲性能與穩健性,需要綜合多個含目標距離單元的測速結果作為最終測速結果。含目標的距離單元與只含噪聲的距離單元相比,相鄰幀綜合像包絡具有較高的相似性,可由相關系數是否過門限確定包含目標的距離單元。
2 步進頻率綜合寬帶信號處理流程
綜上可知,步進頻率綜合寬帶信號處理主要包含以下步驟[1]:1)子脈沖壓縮(包含多普勒校正、包絡對齊);2)相位差分-IFFT測速;3)包絡再對齊;4)速度補償+綜合成像;5)距離像拼接。對應的處理流程圖如圖1所示。由于步進頻率綜合寬帶技術主要用于獲取目標細節信息,脈沖壓縮后在目標位置附近選取一定距離范圍內的若干距離單元數據進行后續處理即可,該距離范圍要大于目標可能的最大尺寸,保證在獲取目標完整高分辨距離像的同時大大減小整個信號處理流程的計算量。
3 系統設計與實現
3.1 系統硬件平臺
選用國產CPCI6-DSP-BW100信號處理板卡作為實時系統的硬件平臺方案,CPCI6-DSPBW100是中國電子科技集團公司第三十八研究所基于自主研制的“魂芯一號”(BWDSP100)高性能浮點DSP處理器構成的6U CPCI總線接口信號處理板板卡[8-9]。板上搭載4片DSP處理器和1片大規模FPGA,對外采用PCI總線和高速串行通信,在功能、性能上均可替代國外高端DSP處理器構成的信號處理板卡,板卡框圖如圖2所示。單個BWDSP100工作主頻為300MHz,每個BWDSP100有4個8 bit鏈路口,DSP片間采用Link口互連,每片DSP通過Link口連接到FPGA;FPGA與BWDSP100間Link口傳輸數據率為266MHz×8 bit,BWDSP100與BWDSP100間的Link口傳輸數據率為300MHz×8 bit,BWDSP100與BWDSP100間無共享總線,可通過Link口互連構成多片DSP分布式并行結構網絡,特別適合流水線處理。

圖1 步進頻率綜合寬帶信號處理流程

圖2 BW100板卡框圖
3.2 系統軟件設計
為了最優化軟件設計,將信號處理整體流程合理分配到多片DSP系統中的每一片中,使得各片上任務所需時間開銷相近,提高系統效率。CPCI6-DSP-BW100信號處理板卡共有4片DSP,需要將整個信號處理流程合理分配到4片上,構成基于任務劃分的流水線實時處理模式[10]。若步進頻率綜合寬帶信號處理一次完整流程所需時間大于兩幀回波數據到達時間間隔,但只要每片所需處理時間均小于兩幀回波數據到達時間間隔,則流水線處理時即可實時獲得運動目標的高分辨距離像數據,滿足實時處理要求。所需運算量最大的是子脈沖壓縮、多普勒校正、包絡對齊,其次是相位差分-IFFT測速和包絡再對齊,再次是速度補償、綜合成像,距離像拼接操作所需運算量最小,因而令DSP片0負責子脈沖壓縮、多普勒校正、包絡對齊操作,DSP片1負責相位差分-IFFT測速,DSP片2負責包絡再對齊,DSP片3負責速度補償、綜合成像以及距離像拼接操作,并行DSP工作流程如圖3所示。
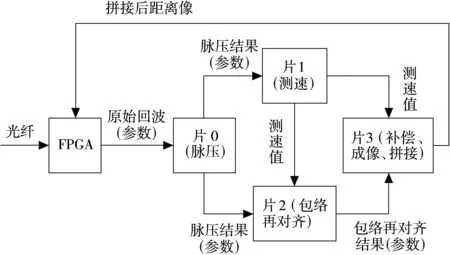
圖3 并行DSP工作流程
Link口數據傳輸采用DMA傳輸方式。FPGA通過Link口一次傳輸一個子脈沖的原始回波(一幀的工作參數單獨傳送或包含在一個脈沖回波數據內)到DSP片0;DSP片0收到一個子脈沖數據后,根據工作參數完成脈沖壓縮、多普勒校正、包絡對齊處理,處理完所有脈沖數據后將處理結果和工作參數通過兩個Link口發送到DSP片1和DSP片2;DSP片1接收完數據后,依據工作參數完成每個距離單元的測速操作,記錄測速值和相關系數,最后對相關系數過門限的距離單元的測速結果進行加權平均得到速度最終估計值,并將該值通過Link口送到DSP片2和DSP片3;DSP片2收到速度估計值后,依據工作參數完成子脈沖的包絡再對齊處理,并將工作參數和處理結果通過Link口發送到DSP片3;DSP片3接收到數據后,依據工作參數完成每個距離單元的速度補償、綜合成像運算,最后完成距離像拼接運算,DSP片3將一幀距離像拼接后,結果及必要參數由Link口送FPGA,以上過程流水進行時實時完成步進頻率綜合寬帶信號處理工作。
3.3 仿真結果與系統測試
設目標遠離雷達,徑向速度v=-1 300 m/s,目標上3個散射點的散射點強度相同,3個散射點分別位于距離29 998 m,30 002 m,30 005 m處。雷達發射波形參數如下:起始載頻f0=5 GHz,綜合寬帶為150MHz,子脈沖帶寬band=8MHz,脈沖寬度τ=0.131 58 ms,子脈沖采樣頻率fs=9.6MHz,步進頻率值為4MHz,一幀內的脈沖個數N=38,脈沖重復周期PRT=1 ms,相鄰兩幀間的時間間隔為57 ms,子脈沖脈壓前回波信噪比為-10 d B。目標速度初始估計值vest=-1 453 m/s。依據此速度初值對相鄰兩幀子脈沖脈壓結果進行多普勒校正和包絡對齊處理,結果如圖4所示。

圖4 子脈沖脈壓結果
由圖4可以看出,未進行包絡對齊處理時,運動目標相鄰兩幀多個子脈沖的脈壓結果包絡無法對齊,依據速度初值進行包絡對齊處理后包絡基本對齊。
圖5為相鄰兩幀回波的相位差分-IFFT結果的模值,解算出目標速度的估計值為vnew=-1 298.805 3 m/s,與目標的速度真實值接近。

圖5 相鄰兩幀回波的相位差分-IFFT結果
圖6為子脈沖中目標位置附近21個距離單元數據的距離像拼接結果,從圖中可以清晰地看到3個尖峰,3個尖峰的位置從左到右分別是29 998 m,30 002 m,30 005 m,3個尖峰的幅度大小基本一致,從左到右分別是228.8,228.8,218.1,3個尖峰的幅度差異由采樣損失造成。圖7給出了未作包絡再對齊處理時的距離像拼接結果,此時拼接結果中出現了嚴重的偽峰現象,拼接失敗,原因在于未作包絡再對齊處理時存在距離定標偏差且距離走動使得目標跨越多個距離單元,該結果說明了包絡再對齊處理在整個信號處理流程中的必要性。
系統測試時由FPGA實時產生對應的回波數據,DSP完成信號處理工作并將處理結果送FPGA后由FPGA發送到計算板卡上保存成數據文件。比對后發現基于國產DSP的步進頻率綜合寬帶信號處理實時系統的處理結果與Matlab處理結果一致,驗證了實時系統的功能正確性,并且滿足實時性設計要求。
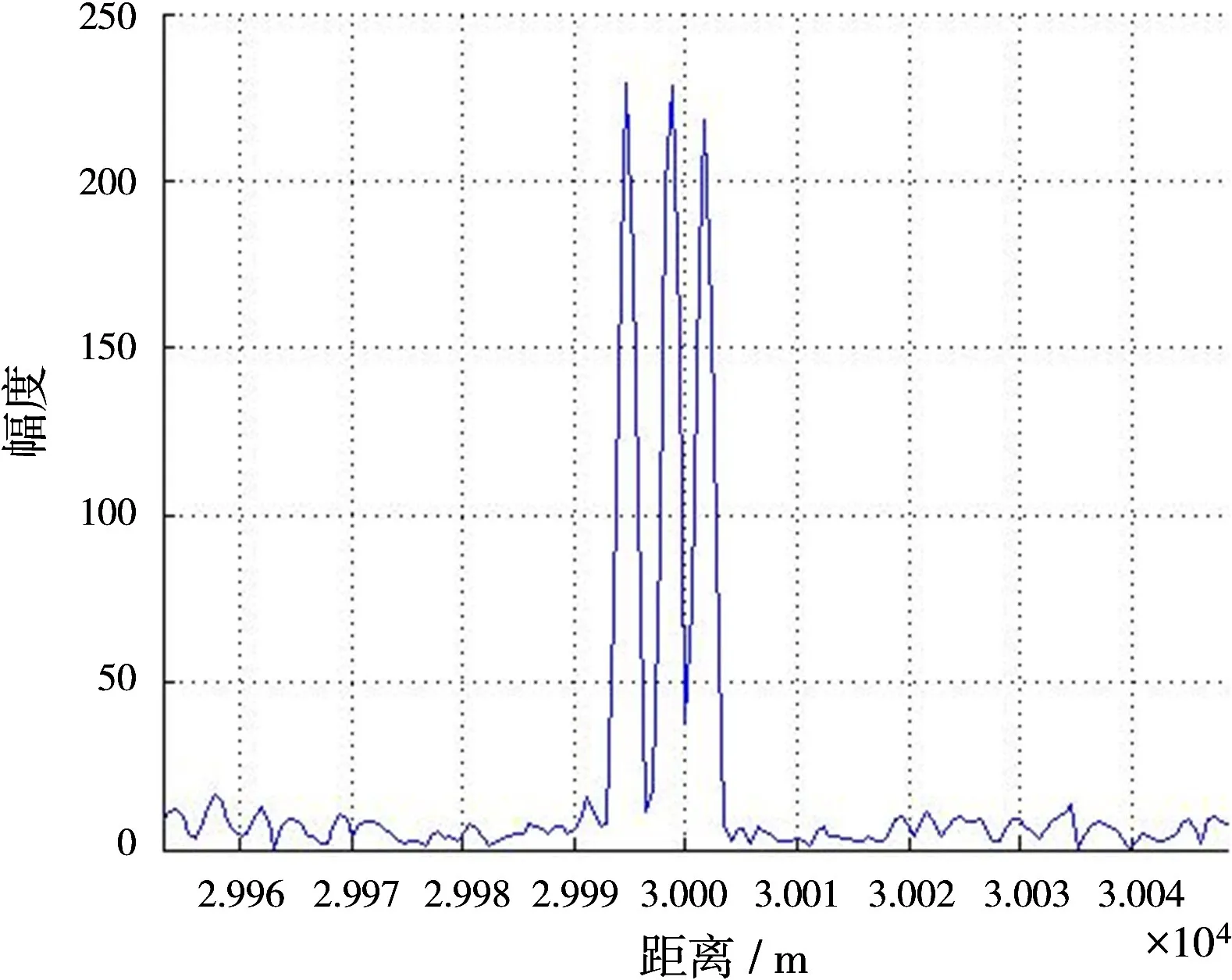
圖6 距離像拼接結果

圖7 無包絡再對齊處理時的距離像拼接結果
4 結束語
本文以步進頻率綜合寬帶距離高分辨成像的需求為背景,介紹了步進頻率綜合寬帶的算法原理和完整信號處理流程,基于國產“魂芯一號”DSP芯片構成的高性能并行信號處理硬件平臺,對實時處理系統的軟件進行最優化設計,給出實時系統方案。文中驗證了步進頻率綜合寬帶實時信號處理系統的正確性、可靠性和實時性能。雷達裝備的發展趨勢是數字化、相控陣化、多功能化,步進頻率綜合寬帶信號處理的實時實現使得窄帶雷達裝備能夠以較低成本擁有距離高分辨能力。特別地,相控陣雷達若發射瞬時大帶寬信號來獲取距離高分辨能力將面臨寬帶數字波束形成等復雜問題,采用步進頻率體制時只涉及到窄帶波束形成,工程研制難度大大降低,因而具有重要的工程應用價值。
[1]毛二可,龍騰,韓月秋.頻率步進雷達數字信號處理[J].航空學報,2001,22(S):16-24.
[2]龍騰,毛二可,何佩琨.調頻步進雷達信號分析與處理[J].電子學報,1998,26(12):84-88.
[3]蔣楠稚,王毛路,李少洪,等.頻率步進脈沖距離高分辨一維成像速度補償分析[J].電子科學學刊,1999,21(5):665-670.
[4]劉宏偉,王俊,張守宏.運動目標環境下步進頻率信號的設計及處理[J].西安電子科技大學學報,1997,24(S):75-81.
[5]劉崢,張守宏.步進頻率雷達目標的運動參數估計[J].電子學報,2000,28(3):43-45.
[6]牛濤,陳衛東.脈沖步進頻率雷達的一種運動補償新方法[J].中國科學技術大學學報,2005,35(2):161-166.
[7]涂建華,石志廣,肖懷鐵.一種基于FFT和對稱性的目標運動補償新方法[J].雷達科學與技術,2009,7(1):65-70.TU Jianhua,SHI Zhiguang,XIAO Huaitie.A New Velocity Compensation Method of Moving Target Based on FFT and Symmetric Property[J].Radar Science and Technology,2009,7(1):65-70.(in Chinese)
[8]CETC38.BW100硬件用戶手冊[M].合肥:中國電子科技集團公司第三十八研究所,2011:1-222.
[9]CETC38.BW100軟件用戶手冊[M].合肥:中國電子科技集團公司第三十八研究所,2011:1-441.
[10]王瑞軍,邱兆坤,黎湘,等.基于并行DSP的實時ISAR成像系統設計[J].雷達科學與技術,2010,8(4):306-311.WANG Ruijun,QIU Zhaokun,LI Xiang,et al.Design of Real-Time ISAR Imaging System Based on Parallel DSP[J].Radar Science and Technology,2010,8(4):306-311.(in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
