GEO衛星軌道傾角漂移對天線指向的影響分析及調整策略
2015-12-31 11:57:00黃霄騰何偉平
上海航天 2015年4期
黃霄騰,賈 瀟,李 峰,何偉平
(北京空間信息中繼傳輸技術研究中心,北京 100094)
0 引言
一般的靜止衛星定點后,必須進行東西和南北方向位置保持,將其星下點經度和緯度控制在規定范圍內(±0.1°),以保證通信、衛星安全等需要。通常情況下,南北位置保持燃料消耗占整個衛星壽命期總燃料消耗的80%以上[1]。因此,在不影響使用前提下許多靜止軌道衛星在入軌初期及壽命后期采用傾斜軌道運行策略,盡可能減少南北位置保持控制次數,有效提高衛星壽命和可用度。
隨著軌道傾角增大,衛星星下點運動軌跡“8”字隨之增大,衛星與地面站之間的相對位置關系不斷變化[2-4]。這種位置關系變化將導致星地鏈路天線指向偏離地面站,引起天線增益損失,影響衛星與地面的通信質量。因衛星一般具備滾動、俯仰姿態長期或連續偏置能力,當衛星定點位置改變時可通過滾動、俯仰姿態偏置控制衛星天線波束范圍始終覆蓋地面站[5]。通常是在地面站出天線波束覆蓋范圍時,直接調整星地鏈路天線波束中心指向地面站,以達到覆蓋要求。當衛星傾角較大時,用該法會因調整次數變多而增加地面操作。本文根據天線增益特性和軌道傾角,給出了補償增益損失的姿態偏置策略。
1 星地鏈路天線指向
當僅考慮軌道傾角引起的經度偏差時,衛星漂移軌跡在當地地平面內隨時間變化滿足

式中:i為衛星軌道傾角;ωe為軌道角速度;Δλ,Δφ分別為衛星相對定點位置的經度和緯度偏差[1-2]。
正常情況下,星地鏈路天線固定指向地面站。隨著傾角的不斷增大,衛星星下點振蕩幅度也逐漸增大,天線指向也會隨之偏離地面站,如圖1所示。若指向偏差超過天線的半波束角,則無法正常實施星地測控、數傳。
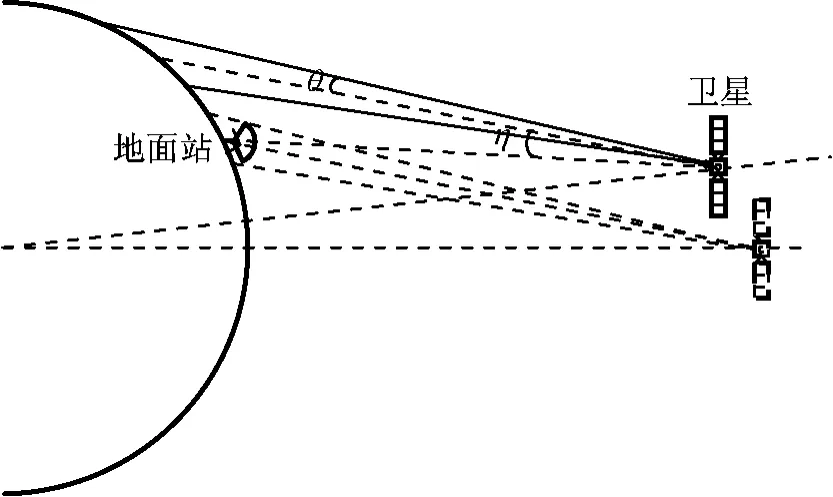
圖1 星地鏈路天線指向Fig.1 Antenna pointing of satellite-ground links
設地面站星下點經度、緯度和高程為(λ,B,H),在地心慣性坐標系中的位置矢量
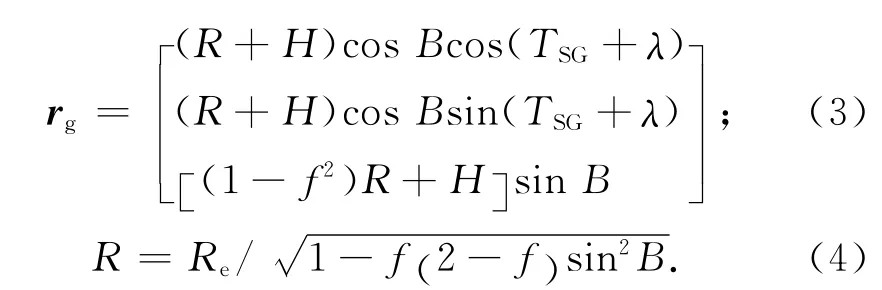
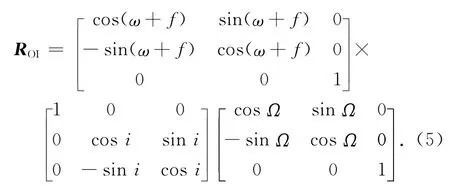
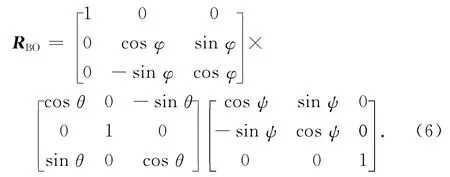
式中:TSG為時刻t格林尼治點恒星時(相對J2000春分點的時角);Re為地球赤道半徑;f為地球扁率。令衛星的位置速度矢量分別為r=[xyz];=[vxvyvz];軌道根數為(a,e,i,Ω,ω,f),分別為衛星軌道半長軸、偏心率、傾角、升交點赤經、近地點幅角和真近點角。則慣性坐標系至衛星軌道坐標系轉換矩陣
地球靜止軌道衛星三軸姿態角為滾動角φ,俯仰角θ,偏航角ψ,軌道系至衛星本體系轉換矩陣
則任意時刻t,衛星本體系中衛星指向地面站矢量

設星地鏈路天線在衛星本體系中安裝方向為
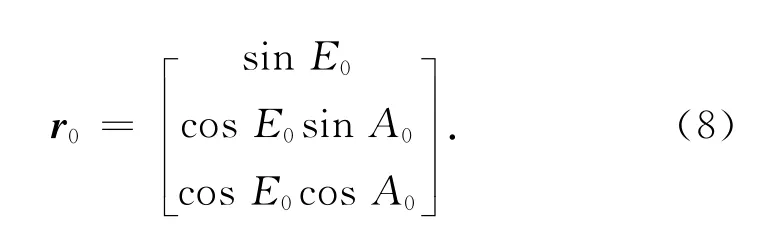
式中:A0為安裝方位角;E0為安裝俯仰角,如圖2所示。
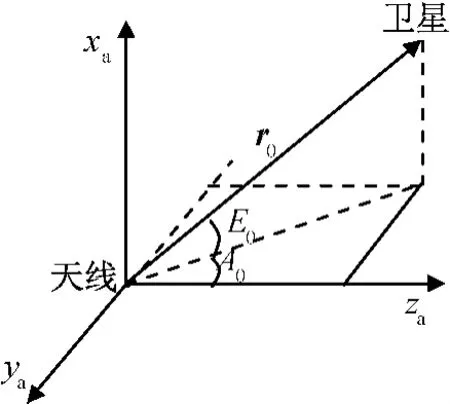
圖2 天線指向Fig.2 Antenna pointing

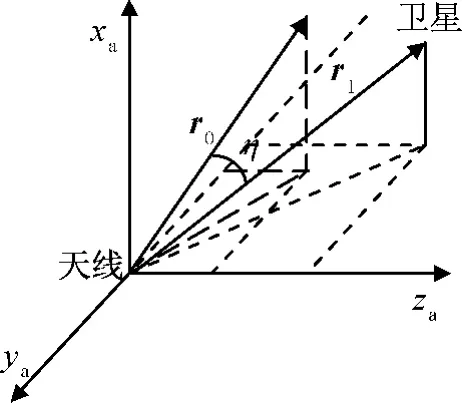
圖3 天線指向偏移Fig.3 Antenna pointing offset
由此產生的增益損耗

式中:θ1/2為半功率波束寬度;λ為天線工作波長;d為天線口面直徑。其中,Lθ<0dB。
某衛星的星地鏈路天線不同軌道傾角的天線指向變化如圖4所示。圖中:點虛線橢圓表示天線增益下降到一定數值后的波束覆蓋范圍,其余橢圓為天線的實際指向。由圖可知:當天線允許增益損失值(波束范圍)較大或軌道傾角較小,即虛線橢圓足夠包含橢圓時,軌道傾角的變化不會對星地鏈路造成影響,否則,1d內會對鏈路產生2次影響,須通過調整天線指向保證鏈路正常。
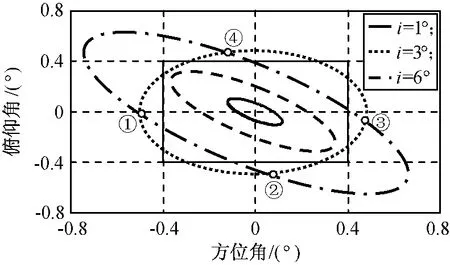
圖4 某衛星軌道傾角引起的天線指向變化Fig.4 Antenna pointing changing caused by orbit inclination of some satellite
2 姿態偏置策略
2.1 長期偏置策略
由圖4可知:24h內天線指向偏離2次超出波束覆蓋范圍。因此,可在天線指向出服務區(對應時刻②、④)時,調整衛星姿態使波束中心指向地面站;天線指向進入服務區(對應時刻①、③)時,將衛星姿態調整至正常狀態,即可保證星地鏈路正常。
某傾角6°衛星24h內星地鏈路天線偏離角如圖5所示。設天線指向偏離角大于0.45°時產生的增益損失影響不可忽略,達到此上限時有必要調整衛星姿態角使天線指向地面站。本文分別對方位和俯仰方向進行超限判斷,采用兩種長期偏置策略。
a)策略1 若方位(或俯仰)方向的指向偏差超出±0.4°范圍,則將滾動(或俯仰)姿態同方向偏置相應角度,如圖6所示,方位和俯仰方向均需進行姿態偏置4次。
b)策略2 設任意時刻方位、俯仰方向的指向偏差分別為 ΔA(t),ΔE(t),則滾動、俯仰方向姿態偏置角滿足
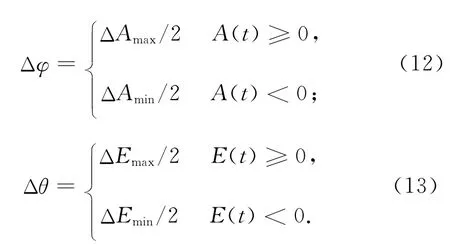
如圖7所示,方位和俯仰方向每日只需分別進行姿態偏置2次,指向角偏差明顯優于策略1。由式(12)、(13)可知:若最大值或最小值的絕對值大于2倍的波束寬度,則每日偏置次數還需增加。
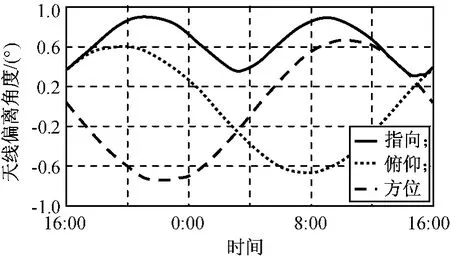
圖5 24h內星地鏈路天線偏離角Fig.5 Angle of deviation for antenna of satellite-ground links in 24h
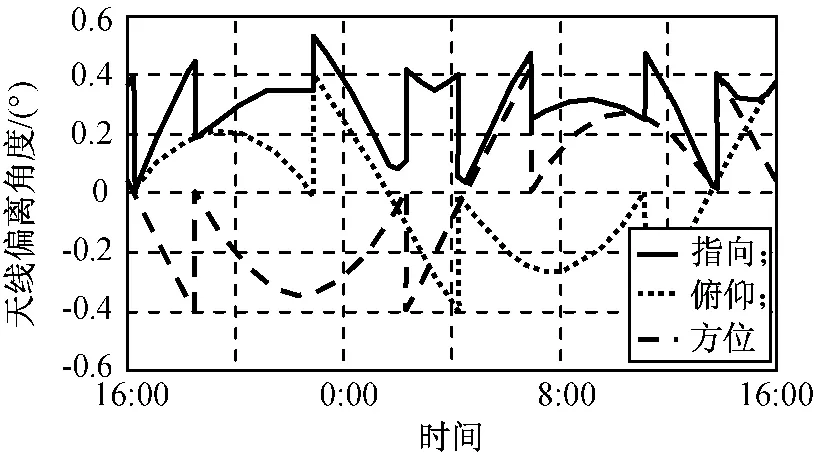
圖6 星地鏈路天線指向調整策略1Fig.6 Adjustment strategy 1of antenna pointing of satellite-ground links
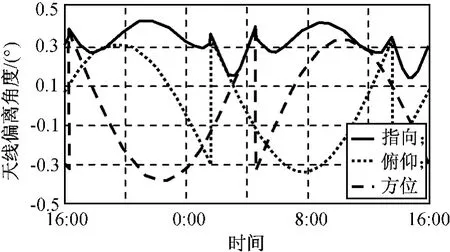
圖7 星地鏈路天線指向調整策略2Fig.7 Adjustment strategy 2of antenna pointing of satellite-ground links
2.2 連續偏置策略
以圖5中方位偏差角為例,令α為偏置控制門限,不考慮測量控制誤差時,α等于天線半波束角,此處取0.45°。當星地鏈路天線波束中心指向偏差角大于α時,計算姿態偏置角度、偏置角速度注入衛星,自主實施角速度偏置。僅考慮方位角姿態偏置,48h內姿態偏置量如圖8所示,能保證天線波束始終覆蓋地面站。傾角增大則需在不改變偏置周期前提下擴大姿態偏置幅度。圖中:兩虛線間為星地鏈路天線波束覆蓋區域。
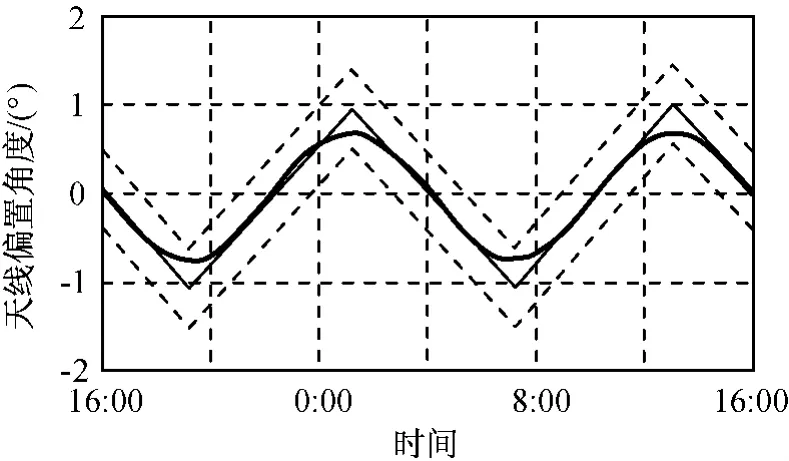
圖8 滾動角連續偏置Fig.8 Rolling angle offset
3 結束語
本文提出了姿態長期和連續偏置兩種策略,在保證星地鏈路天線波束范圍始終覆蓋地面站的同時,盡量減少姿態偏置次數,從而減少地面操作。
[1] GRISE A,DOUGLAS T.Maximization of satellite lifetime:Telesat Canada’s experience[R].AIAA,2006-5096.
[2] SID I,MARCEL J.Spacecraft dynamics and control[M].Cambridge:Cambridge University Press,1977.
[3] 章仁為.衛星軌道姿態動力學與控制[M].北京:北京航空航天大學出版社,1998.
[4] 呂振鐸,李鐵壽,劉良棟,等.航天器軌道動力學與控制[M].北京:中國宇航出版社,2002.
[5] SOOP E M.地球靜止軌道手冊[M].王正才,等(譯).北京:國防工業出版社,1999.