基于提高抗擾性和跟隨性能的控制策略研究
2015-12-23 07:44:25周浩,徐學武,黃善忠
兵器裝備工程學報 2015年9期
【信息科學與控制工程】
基于提高抗擾性和跟隨性能的控制策略研究
周浩,徐學武,黃善忠
(海軍工程大學 兵器工程系,武漢430033)
摘要:以某艦載武器的位置隨動系統為研究對象,在分析原隨動系統的控制模型和仿真結果的基礎上,探討了通過加載轉速反饋、設計轉速調節器來重新構造系統控制模型以提高系統輸出響應特性,通過SIMULINK仿真驗證上述模型改造效果;為增強控制系統的抗擾性能,探討了應用變結構控制替代位置調節器來提高隨動系統的抑擾問題,通過對變結構控制器的結構設計和參數設置,獲得較好的控制效應;仿真試驗表明:融合多種控制模式的變結構控制是解決寬域偏差量的重要方法,而合理的結構設計又會使其成為抗干擾的有力工具。
關鍵詞:控制模型;調節器;變結構控制
收稿日期:2015-06-25
作者簡介:周浩(1971—),男,博士,副教授,主要從事武器系統與運用工程研究。
doi:10.11809/scbgxb2015.09.025
中圖分類號:TJ713
文章編號:1006-0707(2015)09-0097-05
本文引用格式:周浩,徐學武,黃善忠.基于提高抗擾性和跟隨性能的控制策略研究[J].四川兵工學報,2015(9):97-101.
Citation format:ZHOU Hao, XU Xue-wu, HUANG Shan-zhong.Control Strategy Study Based on Improving Perturbation Resistance and Tracking Performance of the Servo System[J].Journal of Sichuan Ordnance,2015(9):97-101.
Control Strategy Study Based on Improving Perturbation Resistance
and Tracking Performance of the Servo System
ZHOU Hao, XU Xue-wu, HUANG Shan-zhong
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430030, China)
Abstract:This paper took a ship-borne weapons position servo system as the research object, based on the analysis of the original servo system control model and the results of simulation, it discusse design by loading speed feedback, speed regulator to reconstruct the system control model to improve the system output response characteristics, and using SIMULINK simulation to make the proves. In order to enhance anti-interference performance of the system, the article also explored the application of variable structure control alternative position controller. Based on the structure of the variable structure controller design and parameter setting, eventually we realized satisfactory control effect. Facts have proven that variable structure control by adopting the combination of a variety of control mode is an important way to solve the wide domain of the deviation value, and reasonable structure design can make it become a powerful tool for anti-interference.
Key words: control model; regulator; variable structure control
某艦載武器的位置隨動系統是典型的按角偏差控制的閉環控制系統,主要功能是對偏差信號進行采樣、轉換、變換和放大,為該裝備角度運行提供具體的控制規律。該系統的控制功能執行機構包括控制信號發送裝置、采樣角指令角比較器、信號轉換放大裝置、驅動電機等[1],最終將位置運動執行指令送達機械減速機構以完成裝備目標指向性運行。該系統既有方位隨動又有俯仰隨動,兩者的機械傳動鏈相互獨立,偏差角采樣機構、隨動控制板件也相互獨立,隨動控制系統的調轉運行機理也相同[1],因此在下列隨動控制模型涵蓋了方位隨動和俯仰隨動并取其一作具體分析。
1位置隨動控制模型及仿真
該武器系統中,完成位置調轉運行任務的隨動控制[2]系統結構框圖如圖1所示。對圖1所示的系統結構框圖中各個功能模塊的數學模型進行理論推導,將建立的微分方程通過拉普拉斯變換得到如圖2所示的位置隨動系統傳遞函數動態結構圖。
對于上述多環控制系統,其性能分析常通過Simulink 動態仿真實現,將系統中各功能模塊的具體參數代入動態結構,并利用Simulink 提供的仿真工具箱和模型庫建立系統動態仿真模型[3]如圖3所示。在輸入信號設置為單位階躍,系統的位置響應曲線(對指令信號的輸出)如圖4所示。
分析其響應曲線,系統輸出值在響應初期就作衰減震蕩,而且在響應過程中振蕩次數多、超調量大、穩定時間長。進一步分析后易知,位置環是系統角度運行的結構閉環,其內有一個電流環,即電流負反饋,電流環負反饋可以實現對執行電機中的電樞電流進行調節,并沒有對電動機的轉速實施內部調節,為了進一步改善位置隨動系統的動態品質,除了需要調節電動機的電樞電流外,還可以引入轉速負反饋。

圖1位置隨動系統結構框圖

圖2 位置隨動系統動態結構

圖3 位置隨動系統動態仿真模型
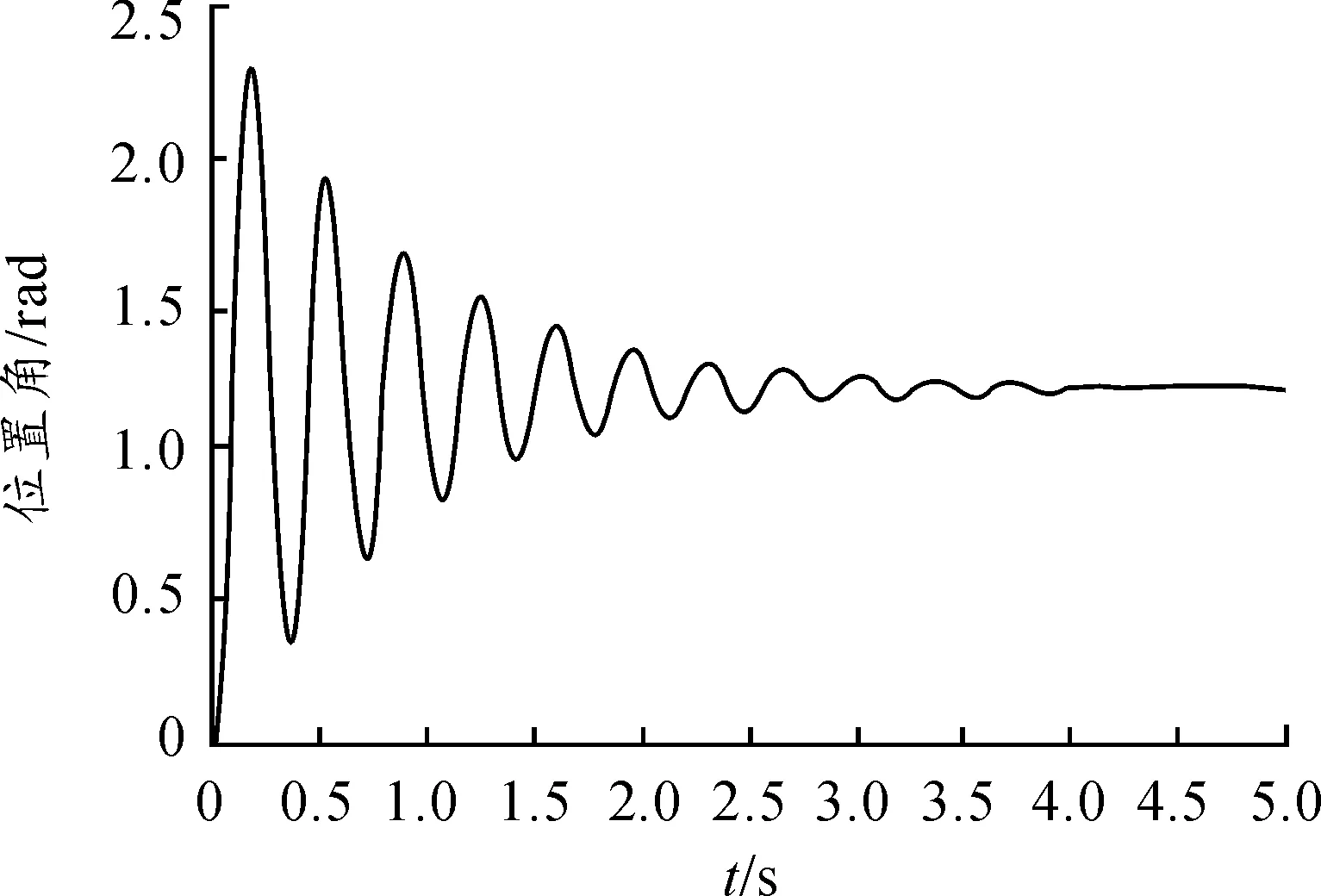
圖4 位置隨動系統階躍響應
2控制模型的改造及仿真
引入轉速負反饋的目的是從內部調節執行電機的轉速,這種改造后的系統就具備3個環,其結構框圖如圖5所示。圖5中的Kt為轉速反饋系數,Kt=0.01。于是重新建立位置隨動系統的動態仿真模型如圖6所示。輸入信號仍設為單位階躍,系統的位置響應曲線如圖7所示。
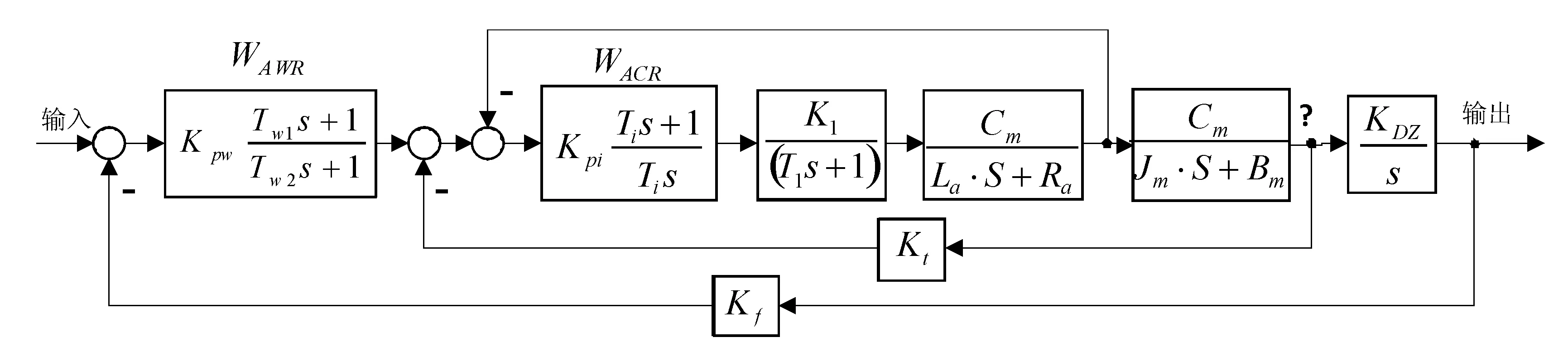
圖5 增設轉速環后系統結構框圖
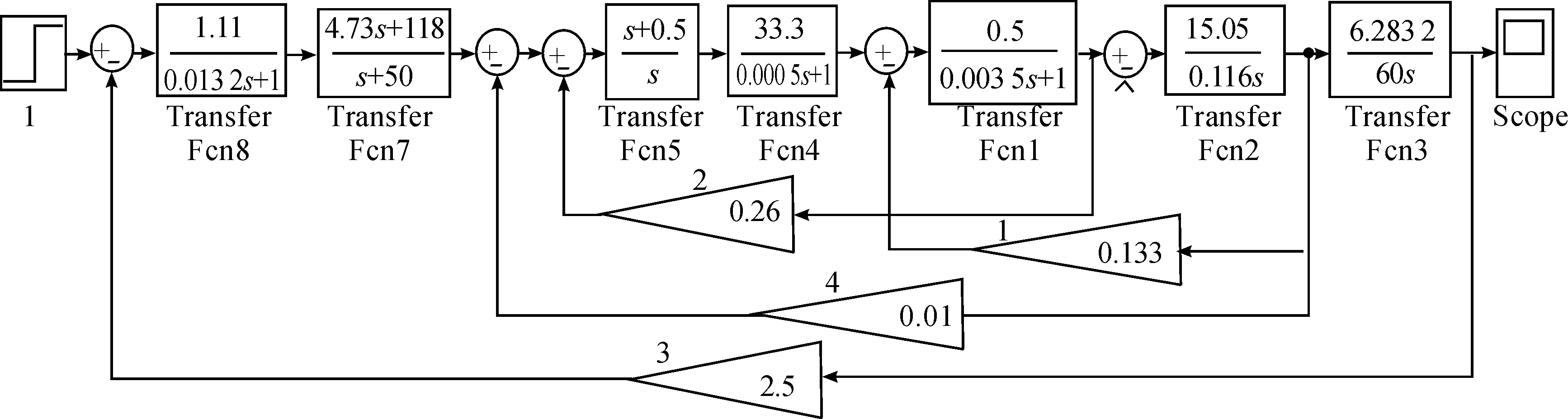
圖6 增設轉速環后系統動態仿真模型

圖7 增設轉速環后系統響應
分析其響應,增設轉速環后的系統在位置輸出響應上較原先的雙環系統有一定改善,但振蕩次數、超調量和穩定時間還未令人滿意。那么如何改進系統才能使閉環響應指標有進一步提高呢?現考慮在轉速負反饋的基礎上,加設轉速調節器,并對轉速調節器參數進行設計。基于上述考量,為實現系統快速響應,考慮將轉速調節器設置為經典的PI調節器[4],其傳遞函數為

將參數設置體現到控制系統動態仿真模型[5],如圖8所示。對設置了轉速調節器的三閉環控制系統進行仿真。其階躍響應如圖9所示。經過多次改造后的控制系統的位置響應,無論是響應速度還是穩定時間都能較好地滿足需求。具體表現為響應時間快,振蕩次數少,穩態誤差小。
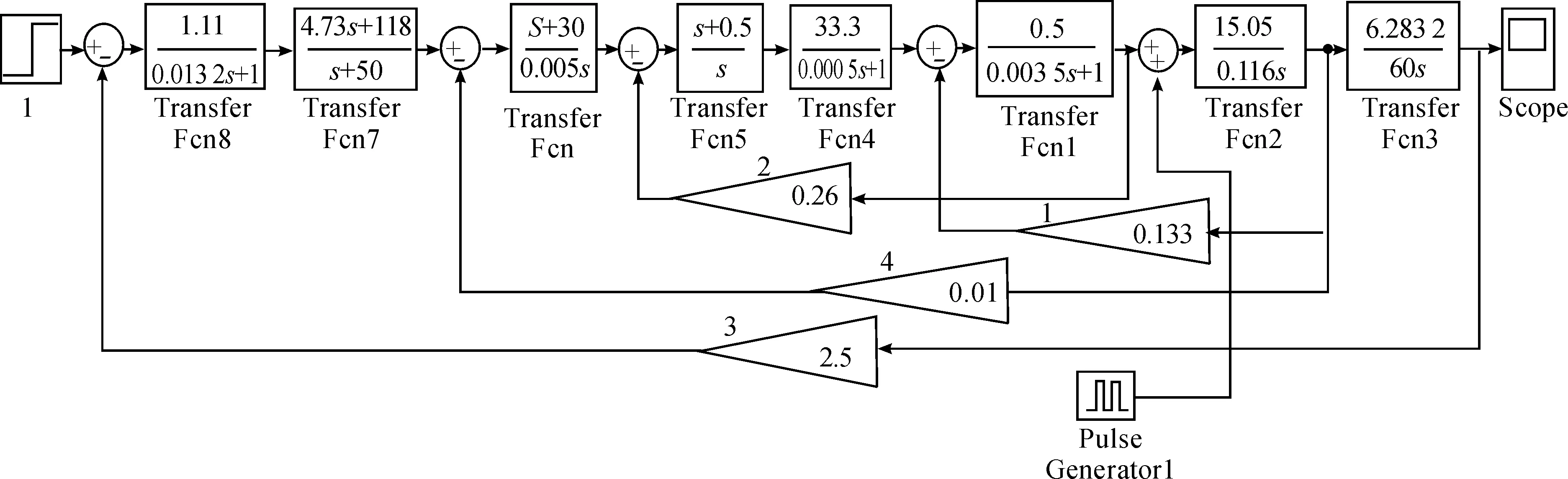
圖8 增設轉速調節器后系統動態仿真模型
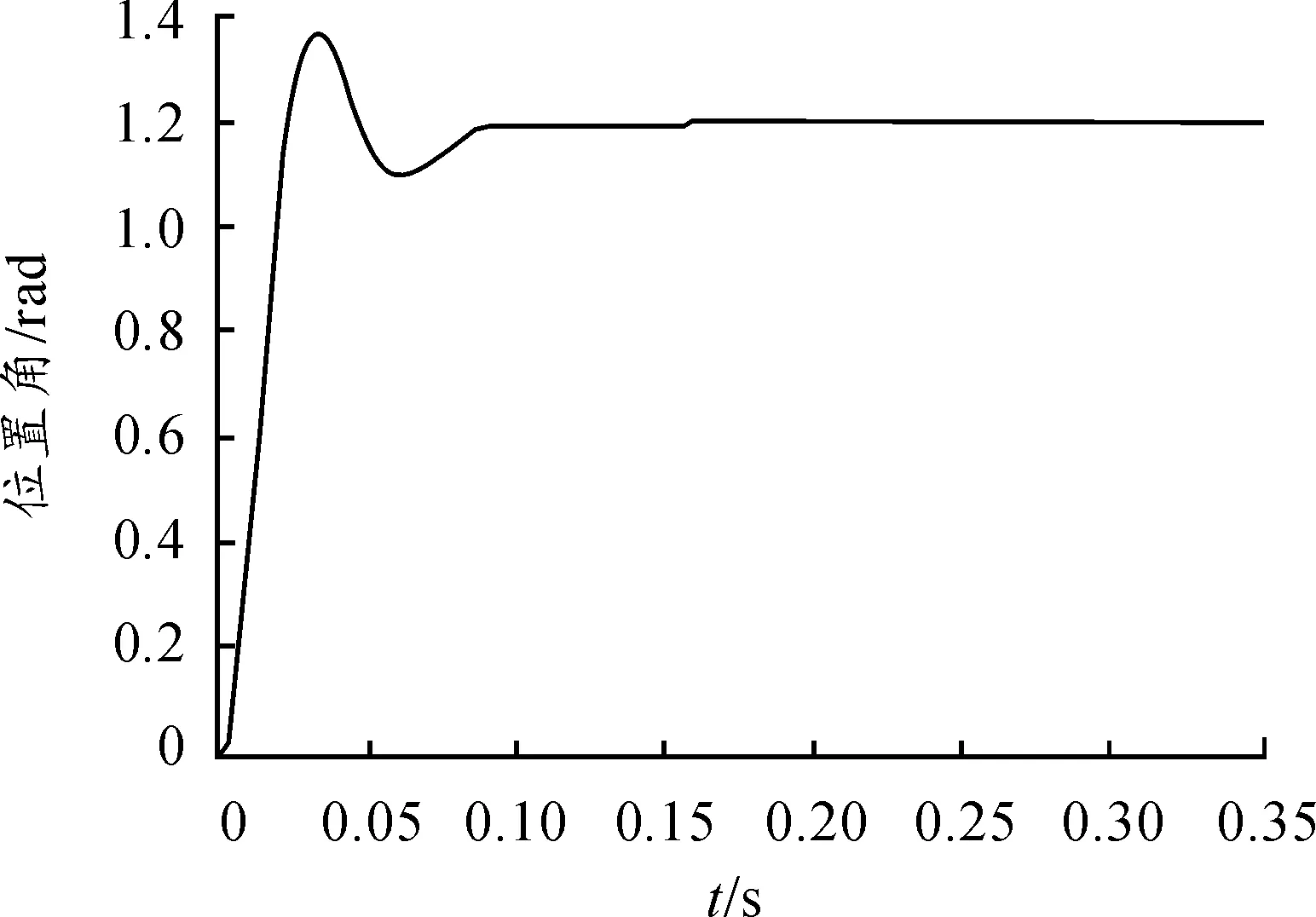
圖9 增設轉速環后系統位置響應
3基于提高系統抗擾性的變結構控制器運用
上文討論了系統在理想條件下的激勵響應,如果系統中存在干擾呢,輸出響應會發生何種變化,為此利用原位置隨動系統動態仿真模型做進一步仿真分析,仿真條件如下:激勵條件同前,t=0.15 s時電樞電流響應處施加一脈沖干擾,仿真時間0.35 s,其位置輸出響應如圖10所示。

圖10 脈沖干擾下的位置響應
不難發現,系統在受到脈沖干擾時,擾動量所引起的超調量和調節時間都還比較大。也就是在上述位置隨動系統中,除響應速度、超調量、穩態誤差之外的另一重要指標-抗擾性尚未滿足。為了解決這一問題,考慮使用變結構控制器替代位置調節器來實施位置調節控制。
變結構控制(variable structure control,VSC)是一種現代控制理論綜合方法,本質上屬于非線性控制。變結構控制系統能夠通過調整控制器結構的變化,改善系統的動態品質,使得系統調節精度高,響應速度快,具有較強的魯棒性。盡管結構變化可能給系統帶來額外的復雜性,但也使得系統性能保持高于一般固定結構控制所獲得的性能,突破了經典控制設計的性能限制,合理地解決了動態性能指標與靜態性能指標之間的平衡問題[6]。
考慮采用如圖11如示控制策略,圖11中變結構控制器的輸入為位置偏差信號,輸出為經過變結構處理過的控制量。

圖11 變結構控制

e(t)為t時刻位置偏差,a為最大加速度,ω(t)為t時刻速度。

4仿真測試與結果分析
采用上述變結構控制器替代位置調節器,即將飽和控制,開方控制,PID控制融合在一起。將變結構控制器控制偏差量設置為Ek=360mil,Es=36mil, a=250mil/s2;仿真條件:Simulink平臺,單位階躍激勵,t=0.15s時電樞電流響應處施加一脈沖干擾,仿真時間0.35s,位置調節器控制的隨動系統和變結構控制器控制的隨動系統在上述同一條件下的位置輸出響應如圖12所示。

圖12 不同控制器下系統對激勵和干擾的響應情況
通過仿真結果的比較知,使用變結構控制器替代原先的位置調節器可令被控系統的超調量σ%小,對干擾的抑制效果明顯。PID控制中的微分環節D值越大,閉環系統對輸出尖波的抑制作用越強,合理地選擇各參量,可最大程度上貼近理想的位置輸出響應。
5結束語
本文以位置隨動系統為研究對象,圍繞著增設轉速環和轉速調節器對系統響應改善這一論題展開論述,運用變結構控制器對原隨動系統進行模型改造,旨在增強系統的抗擾能力,在模型仿真計算的基礎上,驗證了變結構控制模型組建和參數調節的有效性,凸顯出基于變結構控制器運用模型在穩定性、響應速度和抗干擾能力等方面的優勢。
參考文獻:
[1]于存貴,李志剛.火箭發射系統分析[M].北京:國防工業出版社,2012.
[2]盧志剛,吳杰,吳潮.數字伺服控制系統與設計[M].北京:機械工業出版社,2007.
[3]黃永安,馬路,劉慧敏.MATLAB7.0/Simulink6.0 建模仿真開發與高級工程應用[M].北京:清華大學出版社,2005.
[4]陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2005.
[5]劉浩,韓晶.MATLABR2014a完全自學一點通[M].北京:電子工業出版社,2015.
[6]陳亮,江明,林園勝.基于PSO算法的PID控制器參數優化研究分析[J].重慶工商大學學報:自然科學版,2014,31(5):77-80.
[7]AdamyJ,FlemmingA.Softvariable-structurecontrols:asurvey[J].Automatica,2004,40(11):1821-1844.
[8]張彥斌,張寧.火炮控制系統及原理[M].北京:北京理工大學出版社,2009.
[9]董震,郭保全,吳霞,等.火炮發射精度優化問題分析[J].計算機仿真,2015(4):51-54.
(責任編輯楊繼森)

