RBF神經網絡模型在遙感目標檢測中的應用
2015-12-07 05:21:14趙世季
艦船科學技術 2015年7期
趙世季
(上海民航職業(yè)技術學院 民航工程系,上海200232)
0 引 言
光學遙感成像是一種常見的成像方式,由于其形成的圖像直觀易懂,具有較高的分辨率,因此光學遙感圖像具備SAR圖像所沒有的優(yōu)勢。而近年來我國海上艦船目標規(guī)模不斷擴大,如功能越來越廣泛的海洋調查船[1]、各種形態(tài)的海軍戰(zhàn)艦[2]等都相繼涌現,對船舶的自動檢測有利于監(jiān)控特定海域的船舶交通、打擊非法走私行為等[3]。
本文的識別過程包括圖像分割、特征提取、識別分類3個步驟,主要針對6 種常見船舶的光學遙感圖像進行檢測,首先利用kmeans和區(qū)域生長法對圖像進行分割,然后提取灰度一致性矢量、距離直方圖2個特征,最后構建RBF神經網絡模型對這6種常見船舶目標的遙感圖像進行檢測。
1 光學遙感圖像預處理
在對圖像進行分割之前,先利用高斯濾波去除圖像噪聲,由于船舶的光學遙感圖像內容復雜,其中通常包括碼頭、陸地、海洋及船舶本身,另外圖像在成像過程中受海況、霧、光照等多種不可控因素影響,形成的圖像復雜多變,因此對于船舶的光學遙感圖像通常采用由粗到精的分割方式。
本文首先利用kmeans法對圖像進行粗分割,為確定聚類數,將整個圖像數據集視為一個偽熱力學系統(tǒng),當圖像被分割成k個類別時,稱圖像此時處于狀態(tài)k。設置分割的初始狀態(tài)為k = 1,在每個狀態(tài)k,利用傳統(tǒng)的kmeans 方法將圖像分割為k 類,并定義此時的圖像系統(tǒng)不穩(wěn)定度為:
式中:fi(x,y)為圖像第k個分割狀態(tài)下的第i個子區(qū)域的灰度值;avei為第k個分割狀態(tài)下的第i個子區(qū)域的平均灰度值。
由上面的定義可知,S 反映了圖像在每個分割狀態(tài)k 下的類內差異與類間差異的比值,S 越小,說明此時的分割狀態(tài)越穩(wěn)定。考慮到一般船舶的光學遙感圖像中最多有4 類不同的物體,即本文中k的最大取值為4,使得不穩(wěn)定度S 最小的k 值即為遙感圖像的最佳聚類數。
在用kmeans法對圖像粗分的基礎上,求取每個子區(qū)域的灰度平均值,將此平均值作為區(qū)域生長法的種子點,根據歐式距離比較種子及其周圍8 鄰域像素點是否相似,若相似則將鄰域像素點加入種子點所在區(qū)域,然后將新區(qū)域內的像素點作為種子點繼續(xù)判斷其鄰域像素,直至沒有任何滿足條件的鄰域像素,至此區(qū)域生長完畢。圖1 給出了2 幅遙感圖像的分割效果。
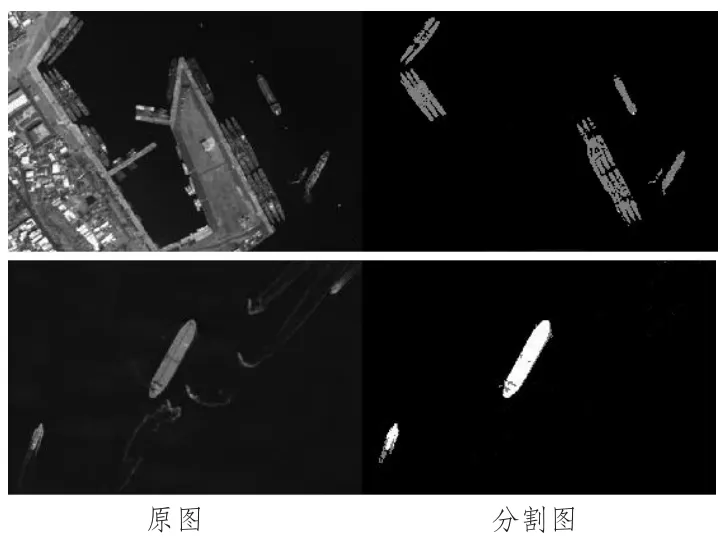
圖1 分割結果Fig.1 Segmentation result
2 特征描述子
特征提取是海上目標識別的關鍵部分。為有效識別目標類型,特征需滿足旋轉仿射不變性、運算量低等特點。本文用灰度一致性矢量、距離直方圖作為目標識別的特征。
2.1 灰度一致性矢量
灰度一致性矢量(GCVs)最為核心的問題就是對于連通域像素個數的統(tǒng)計。如圖2所示,深色數字2 屬于一個連通區(qū)域,該區(qū)域構成一個獨立的子區(qū)域,統(tǒng)計出此區(qū)域的像素點個數,即深色數字2的個數,連通域像素個數的統(tǒng)計實際是樹的前序遍歷問題。對其他所有連通域都采用如上方式統(tǒng)計其像素個數,然后以連通域索引為橫坐標建立連通域像素個數的直方圖。
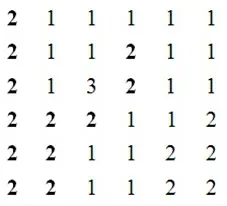
圖2 連通域Fig.2 Connected region
關于灰度一致性矢量的一致性閾值選擇問題,如人為設定某固定值,則有很大可能某個像素區(qū)間全被判為一致性區(qū)域,或者都為非一致性區(qū)域,因此本文定義閾值為:

式中:n為第i 類灰度的連通區(qū)域個數,Ni為連通區(qū)域i的所有像素個數,當某一連通域中的像素個數大于T 時,判為一致性區(qū)域,否則為非連通性區(qū)域。
2.2 距離直方圖
通常船舶目標的質心相對于目標邊界各像素點具有位移和旋轉不變性,據此可統(tǒng)計目標邊緣上的各像素點到船舶質心的距離,并將其繪制成直方圖,此直方圖又稱為距離直方圖。該統(tǒng)計特征不僅有效地描述了船舶目標的形狀輪廓,而且計算復雜度低。定義歸一化系數為:

據以上公式,船舶目標的質心坐標表示為:
船舶目標的邊緣像素點到質心的距離為:

據此可生成距離直方圖。為了使直方圖具有尺度和旋轉不變性,此處需將其歸一化,即將直方圖的每個柱除以整個直方圖的最大值,使其歸一化到0~1的范圍。圖3 給出了圖1 中第1 幅圖的距離直方圖。
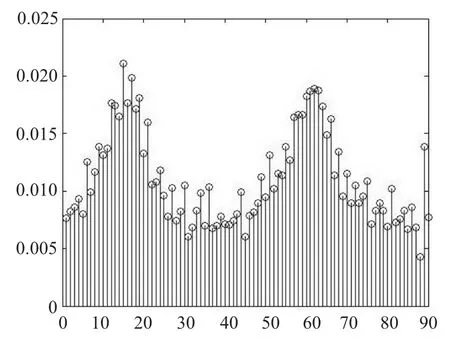
圖3 距離直方圖Fig.3 Distance histogram
3 RBF神經網絡模型
3.1 RBF 網絡結構
RBF 網(徑向基函數神經網絡)是一種前饋型神經網絡[4],通常網絡只有3 層。圖5為n個輸入節(jié)點,h個隱節(jié)點,m個輸出結點的n-h(huán)-m型結構RBF 網,網絡中x=(x1,x2,…,xn)T∈Rn為輸入矢量,Φi(* )為隱節(jié)點的激活函數,本文Φi(* )采用Gaussian 函數,RBF 網中的隱節(jié)點對輸入通常具有局部特性,即如果輸入離神經元的隱節(jié)點中心越遠,則該隱節(jié)點對該輸入的響應就越低,因此RBF 網的每個隱節(jié)點都具有一個數據中心ci,該ci決定了對于特定的輸入,將有若干個神經元被激活,W∈Rh×m為隱節(jié)點的權值矩陣,b0,…,bm為輸出節(jié)點偏置,y=[y1,…,ym]T為網絡輸出。圖4 給出了常見RBF 網的網絡結構。

圖4 RBF 網絡結構Fig.4 Network structure of RBF
3.2 聚類學習算法
聚類方法作為最常用的RBF 網學習算法,其一般做法是先用無監(jiān)督的kmeans 算法對輸入樣本進行聚類分析,從而確定各隱節(jié)點的數據中心ci,并依據相鄰數據中心間的歐式距離確定各隱節(jié)點的擴展常數δi,然后隱節(jié)點的輸出權值矩陣W和輸出節(jié)點的偏移系數b 便可用常規(guī)的梯度法進行訓練。
設訓練的迭代次數為k,c1(k),c2(k),…,ch(k)為隱節(jié)點的聚類中心,w1(k),w2(k),…,wh(k)為其對應的聚類子域,則kmeans 算法步驟如下:
1)令k = 1,初始聚類中心確定為從總樣本中隨機抽出的h個不同輸入樣本。
2)計算各輸入樣本到各隱節(jié)點聚類中心的歐式距離。
3)對于輸入樣本Xj,將其歸入與之距離最接近的中心點ci(k),即當滿足i(Xj)=-ci(k)‖,i = 1,2,…,h 時,Xj∈wi(k)。
4)利用新樣本計算新的隱節(jié)點聚類中心:

其中Ni為聚類子域wi(k)中的樣本總個數。
5)當ci(k +1)≠ci(k)時,則轉步驟2),否則轉步驟6)。
6)計算隱節(jié)點與其最相鄰的隱節(jié)點聚類中心的范式距離作為當前隱節(jié)點的擴展常數δi= Kdi,其中K 稱為重疊系數,即。
圖5 給出了6 種船舶圖像的部分輸入樣本經過上述kmeans 聚類后的結果,每種船舶類型10個樣本,隱節(jié)點個數h = 6,由聚類結果可以看出,得到的6個數據中心各不相同。
圖6 給出了訓練誤差隨訓練次數的變化情況,訓練和測試數據集都來自美國海軍研究院和美國海軍武器中心,學習率η 取固定值0.02,目標誤差0.01,初始權值和偏置均為(-0.1,0.1)之間的隨機數。

圖5 聚類結果Fig.5 Clustering result
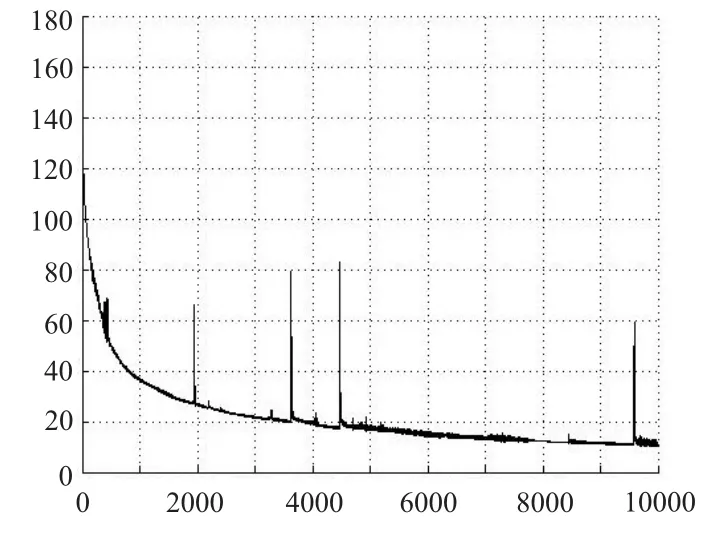
圖6 訓練誤差曲線Fig.6 Training error
為排除識別結果的偶然性,本文共進行5 組獨立重復試驗。表1 給出了各重復試驗下算法對每種船舶目標的檢測精度。由表可看出,構建的RBF 網絡模型對所有船舶的平均檢測精度大約為86%。

表1 分類精度Tab.1 Classification accuracy
4 結 語
本文利用RBF 網對6 種海上常見目標進行識別。結合kmeans和區(qū)域增長法對遙感圖像進行分割,然后提取了目標區(qū)域的灰度歸一化矢量和距離直方圖2個特征。最后利用聚類學習對RBF 網絡進行訓練,并用其對船舶進行檢測識別,準確率達到86%,有效實現了常見海船舶的檢測。
[1]陳練,蘇強,董亮,等.國內外海洋調查船發(fā)展對比分析[J].艦船科學技術,2014,36(1):2-7.CHEN Lian,SU Qiang,DONG Liang,et al.The development and comparative analysis of ocean survey ship[J].Ship Science and Technology,2014,36(1):2-7.
[2]熊正南,蔡開仕,武鳳德,等.21世紀美國戰(zhàn)略潛艇導航技術發(fā)展綜述[J].艦船科學技術,2002,24(3):30-37.XIONG Zheng-nan,CAI Kai-shi,WU Feng-de,et al.Review of submarine navigation technology of United States in 21st century[J].Ship Science and Technology,2002,24(3):30-327.
[3]BURGESS D W.Automatic ship detection in satellite multispectral imagery[J].Remote Sensing,1993,59(2):229-237.
[4]魏迎春,王金龍,馬明濤.基于RBF神經網絡的沉降槽泥層高度軟測量模型研究[J].中國儀器儀表,2010(1).WEI Ying-chun,WANG Jin-long,MA Ming-tao.Tank mud height measurement modeling based on RBF neural network[J].China Instrument,2010(1).
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
今日農業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52