一種基于單向輔助面滑模控制的無人機姿態(tài)控制器設(shè)計與仿真
2015-11-26 06:20:16呂海龍
兵器裝備工程學(xué)報 2015年11期
關(guān)鍵詞:設(shè)計
呂海龍
(南京航空航天大學(xué)自動化學(xué)院,南京210016)
一種基于單向輔助面滑模控制的無人機姿態(tài)控制器設(shè)計與仿真
呂海龍
(南京航空航天大學(xué)自動化學(xué)院,南京210016)
根據(jù)無人戰(zhàn)斗機機動飛行的仿真控制品質(zhì)要求,應(yīng)用了一種基于冪次趨近律單向輔助面滑模控制方法,用于解決無人機機動飛行狀態(tài)下的非線性控制問題;首先建立了無人機六自由度數(shù)學(xué)模型;然后構(gòu)建了控制系統(tǒng)的總體結(jié)構(gòu),并根據(jù)冪次趨近律單向輔助面滑模控制方法,設(shè)計了系統(tǒng)內(nèi)外回路的姿態(tài)控制器;最后進(jìn)行了仿真驗證。仿真結(jié)果表明所設(shè)計的控制器具有良好的控制效果,保證了無人機機動飛行過程中的安全性與穩(wěn)定性,且相對于常規(guī)滑模控制方法,具有更好的抗抖振能力。
無人戰(zhàn)斗機;飛行控制;滑膜控制;仿真
由于無人機在軍事和科學(xué)研究等領(lǐng)域的廣泛應(yīng)用,無人機研究已成為了一個比較熱門的問題[1]。為保證無人機能安全有效地完成任務(wù),需要解決的基本問題是無人機的控制。然而,由于無人機是一個復(fù)雜的多輸入多輸出系統(tǒng)[2],隨著現(xiàn)代無人機性能要求的提高,一些傳統(tǒng)的線性化控制方法已經(jīng)不能滿足要求。
解決非線性問題的方法有很多,其中滑模控制是一種比較有效的方法[3]。但是傳統(tǒng)滑模控制器切換時存在嚴(yán)重的抖振現(xiàn)象,為抑制抖振,有學(xué)者提出了一種單向輔助面滑模控制方法[4]。為改善單向輔助面滑模控制收斂速度慢的缺點,有人提出了基于冪次趨近律的單向輔助面滑模控制[5]。目前該控制方法未應(yīng)用于無人機的控制領(lǐng)域。
本文將冪次趨近律單向輔助面滑模控制用于無人機的控制。首先基于無人機六自由度數(shù)學(xué)模型及冪次趨近律單向輔助面滑模控制方法,設(shè)計了內(nèi)外回路的姿態(tài)控制器;然后通過仿真驗證,結(jié)果表明該控制器對無人機有較好的控制效果,抗抖振效果比傳統(tǒng)滑模要好。
1 問題描述
1.1 無人機數(shù)學(xué)模型
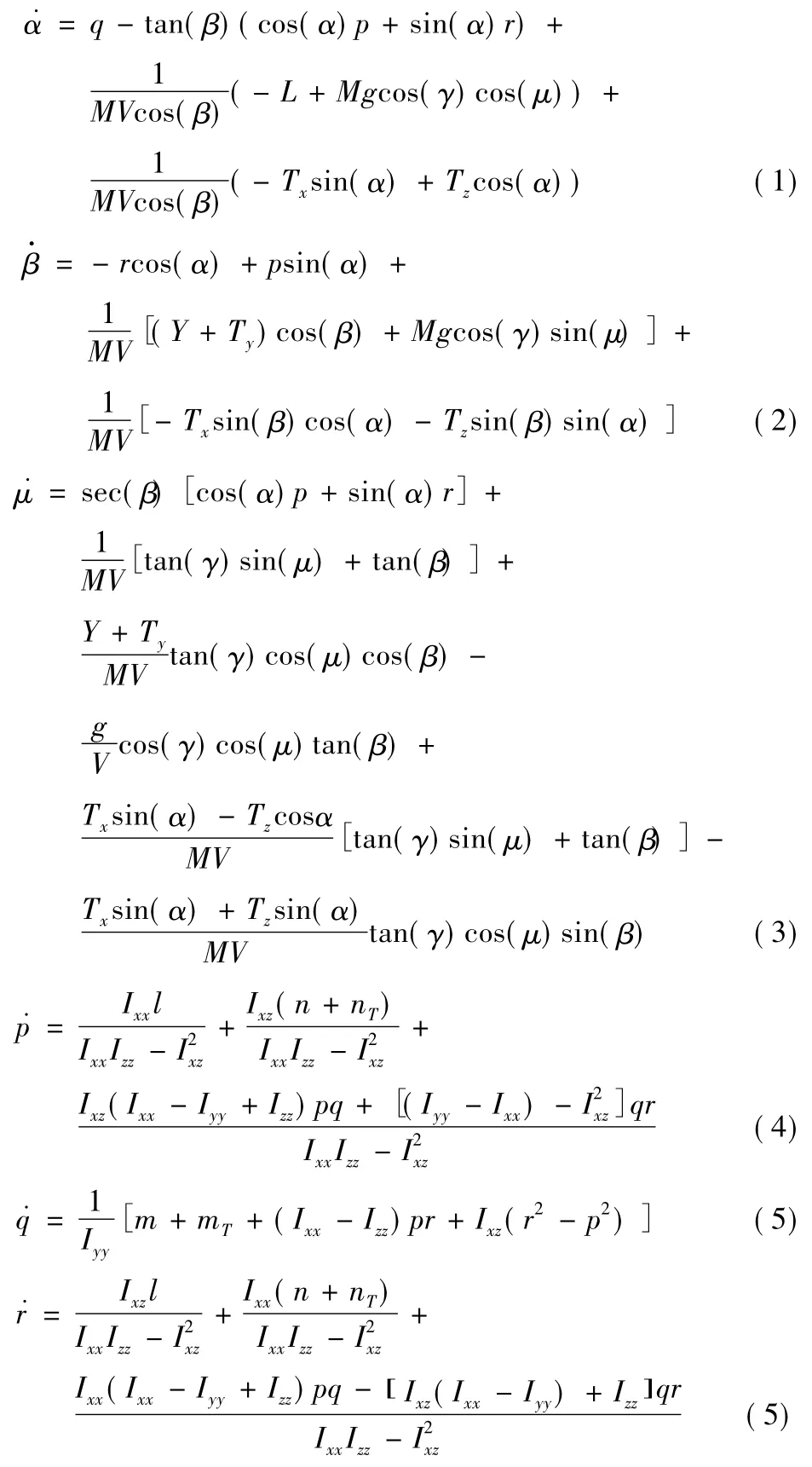
為設(shè)計姿態(tài)控制器,給出了無人機六自由度數(shù)學(xué)模型
1.2 機動飛行性能指標(biāo)
本文針對具有矢量推力的無人戰(zhàn)斗機,研究其在機動飛行狀態(tài)下的飛行性能與控制效果,最終控制目標(biāo):給出無人機動作指令,讓無人機跟蹤姿態(tài)指令信號。
依據(jù)飛行控制系統(tǒng)自動駕駛儀的基本性能指標(biāo)要求,具體姿態(tài)角、馬赫數(shù)、過載等參數(shù)給定信號的取值范圍如下:
1)縱向姿態(tài)。常規(guī)情況下,俯仰角θ在15±°范圍內(nèi),精度不低于0.5±°,而本例中為了驗證無人機大機動的飛行情況,俯仰角將接近到90附近,此時已經(jīng)到達(dá)常規(guī)控制律和一般最優(yōu)控制律性能發(fā)生質(zhì)變的邊界點。
2)橫側(cè)向姿態(tài)。按照飛行控制系統(tǒng)原理,航向選擇范圍是360°。在改變航向的過程中建立滾轉(zhuǎn)角,轉(zhuǎn)彎角速度在飛行包線范圍內(nèi)以防止失速,滾轉(zhuǎn)角φ在90±°范圍內(nèi),精度不低于1±°。一般采用協(xié)調(diào)轉(zhuǎn)彎,當(dāng)穩(wěn)態(tài)滾轉(zhuǎn)角在60°左右時,側(cè)滑角誤差范圍應(yīng)小于2°,航向角ψ的精度不低于0.5±°。
3)高度與馬赫數(shù)。隨著高度的增加,飛機的各氣動導(dǎo)數(shù)均呈非線性變化的趨勢。此時要求高度控制精度誤差在0.1%以內(nèi),馬赫數(shù)保持控制器的精度為高于0.05。
2 控制器設(shè)計
2.1 控制原理
無人機運動方程的狀態(tài)量x=[p,q,r;α,β,μ;V,γ,χ;x,y,z]T共有12個狀態(tài)量,可以通過時標(biāo)分離法把這些狀態(tài)量分成如圖1所示的4個回路,然后運用冪次趨近律單向輔助面滑模控制方法設(shè)計控制器。
x1=[p,q,r]T為角速率回路狀態(tài)量,由于角速率狀態(tài)變量變化較快,所以由其構(gòu)成的回路也稱為快變量回路,狀態(tài)變量稱為快變量。
x2=[α,β,μ]T為姿態(tài)回路狀態(tài)量,由于這些狀態(tài)變量變化的較慢,所以由其構(gòu)成的回路也稱為較慢變量回路,狀態(tài)變量稱為較慢變量。
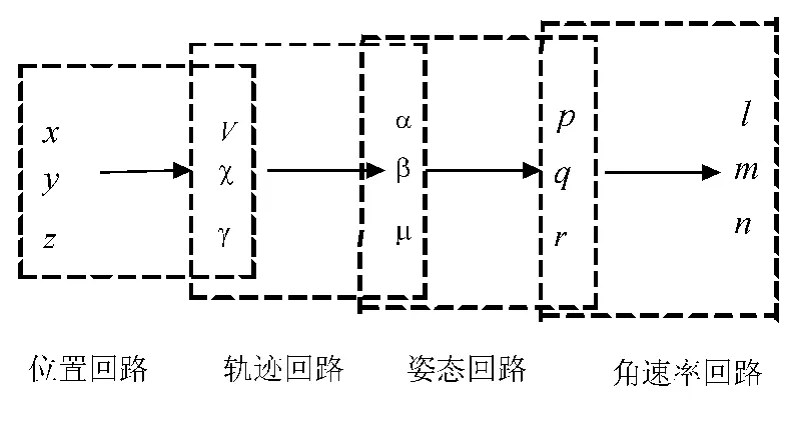
圖1 控制原理圖
x3=[V,γ,χ]T為軌跡回路狀態(tài)量,由于該變量變化的慢,所以該回路也稱為慢變量回路,狀態(tài)變量稱為慢變量。由于該狀態(tài)量的產(chǎn)生是由推力和相對于速度軸的姿態(tài)矢量產(chǎn)生的法向力和側(cè)向力經(jīng)一次積分后形成的,所以它比姿態(tài)矢量更慢。
x4=[x,y,z]T為無人機對地位置矢量,位置回路狀態(tài)量。
2.2 控制器設(shè)計
根據(jù)冪次趨近律單向輔助面滑模控制器的設(shè)計方法,首先選擇切換面。
2.2.1 選擇切換面
定義:
{(x1,∫xi)|S1i(xi,∫xi)<0;S2i(xi,∫xi)<0;xi∈R;∫xi∈R}為第0i個空間,同理可以定義空間1i,…,3i。如圖2所示,i=1,…,n(n為系統(tǒng)維數(shù))。
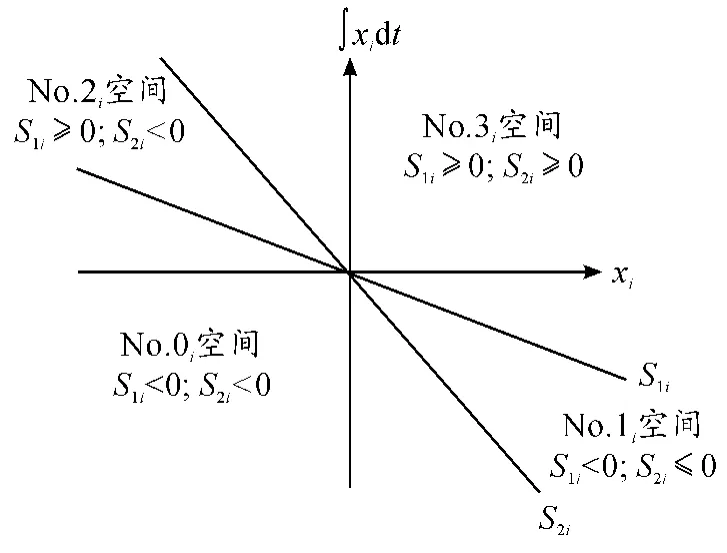
圖2 切換面示意圖
圖3中,S1i,S2i為切換面。表達(dá)式為
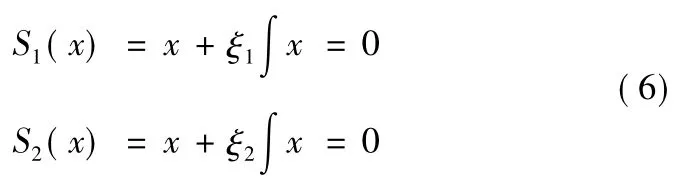
其中:ξ1=diag{ξ11,…,ξ1n};ξ2=diag{ξ21,…,ξ2n};S1(x)=[S11,…,S1n]T;S2(x)=[S21,…,S2n]T,的簡寫;ξ1i>0;ξ2i>0;ξ1i≠ξ2i。

圖3 單向輔助面示意圖

點PS1i+,PS1i-,PS2i+,PS2i-組成凸四邊形,線段PS1i+PS2i-,PS1i-PS2i-,PS1i+PS2i+,PS1i-PS2i+構(gòu)成單向輔助面H0i,H1i,H2i,H3i,單向輔助面方程如式(8)所示:

式(8)中:j∈{0,1,2,3};ωji1≠0;Mi>0,Mi是常數(shù)。

圖4 飛行控制律結(jié)構(gòu)

式(9)中,ωi1、ωi2為
當(dāng)前輔助面可記為

式(10)中:H=[H1,…,Hn]T;ω1=diag{ω11,…,ωn1};ω2= diag{ω12,…,ωn2};M=[M1,…,Mn]T。
2.2.2 控制器設(shè)計
針對快回路運動系統(tǒng)的3個通道,p,q,r分開設(shè)計控制律。首先對俯仰角速度p設(shè)計控制器如下:
1)選擇切換面:

其中xpd-p誤差指令:

其中,pc為指令信號,p為實際信號。選取ωp11=1,ωp12=2,ωp21=1,ωp22=1。
切換面Sp1,Sp2將空間分為4個子空間,0空間為同時滿足Sp1<0,Sp2<0的子空間。1空間為同時滿足Sp1<0,Sp2≥0的子空間,2空間為同時滿足Sp1≥0,Sp2<0的子空間,3空間為同時滿足Sp1≥0,Sp2≥0的子空間。
2)設(shè)計單向輔助面。在切換面Sp1上選取點PS11-(2,-1),PS11+(-2,1),在切換面Sp2上選取點。
在0空間內(nèi),點PS11+(-2,1),所在的面定義為單向輔助面Hp0,在1空間內(nèi)點PS11-(2,-1),所在的面定義為單向輔助面Hp1,在2空間內(nèi)點,PS11-(2,-1)所在的面定義為單向輔助面Hp2,在3空間內(nèi)點PS11-(2,-1),所在的面定義為單向輔助面Hp3。
由此可得,單向輔助面方程為
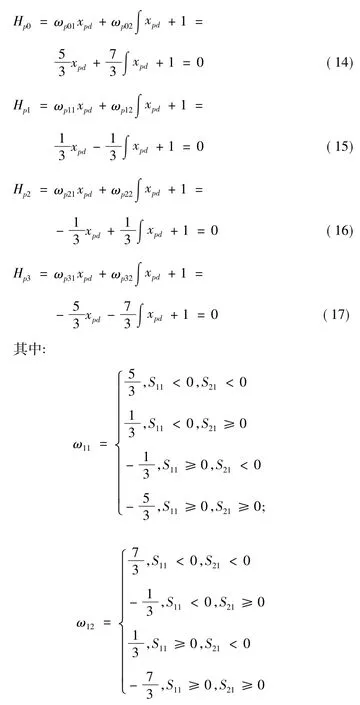
3)設(shè)計控制器。根據(jù)冪次趨近律單向輔助面滑模控制器u表達(dá)式如下:

其中:N=λ(M-H)α,u=[δaδeδrδyδz]T,,,ω1=[ωp1ωq1ωr1]T,ω2=[ωp2ωq2ωr2]T,,λ>0是可調(diào)參數(shù)。
同理可得到q、r、α、β、μ的單向輔助面分別為Hq、Hr、Hα、Hβ、Hμ,然后可分別求得控制器。
3 仿真結(jié)果及分析
仿真時根據(jù)1.1節(jié)無人機六自由度非線性微分方程采用文獻(xiàn)[7]參數(shù)設(shè)計了數(shù)值仿真環(huán)境。對無人機眼鏡蛇機動動作進(jìn)行了仿真驗證并將傳統(tǒng)滑模設(shè)計的控制器與冪次趨近律單向輔助面滑模控制器進(jìn)行對比,以驗證冪次趨近律單向輔助面滑模算法具的控制效果。
仿真的初始配平條件為:高度2 000 m,馬赫數(shù)0.35,油門開度85%,無人機處于定直平飛狀態(tài)。通過傳統(tǒng)滑模控制器和基于冪次趨近律的單向輔助面滑模控制器仿真圖(圖5~圖15)。

圖5 迎角仿真圖
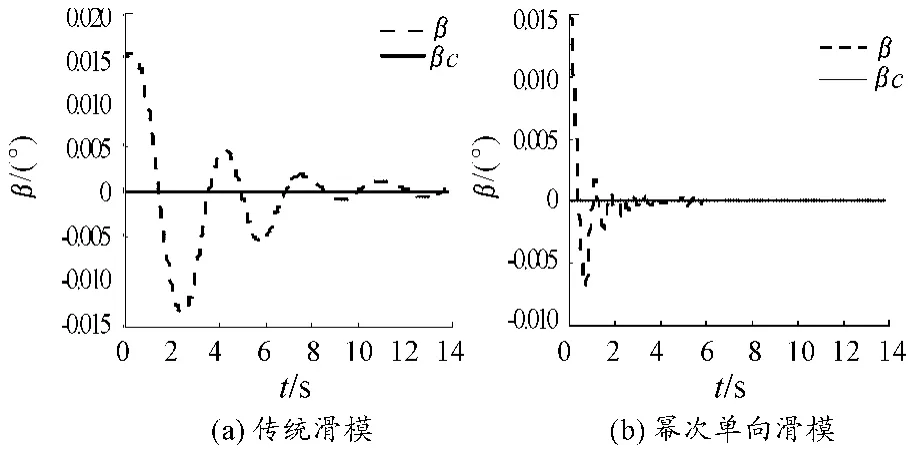
圖6 側(cè)滑角仿真圖

圖7 滾轉(zhuǎn)角仿真圖
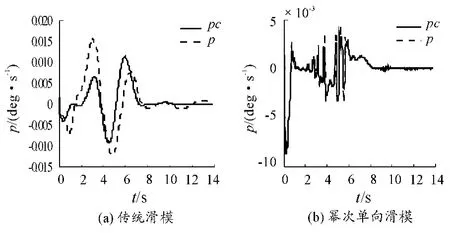
圖8 滾轉(zhuǎn)角速度仿真圖

圖9 俯仰角速度仿真圖
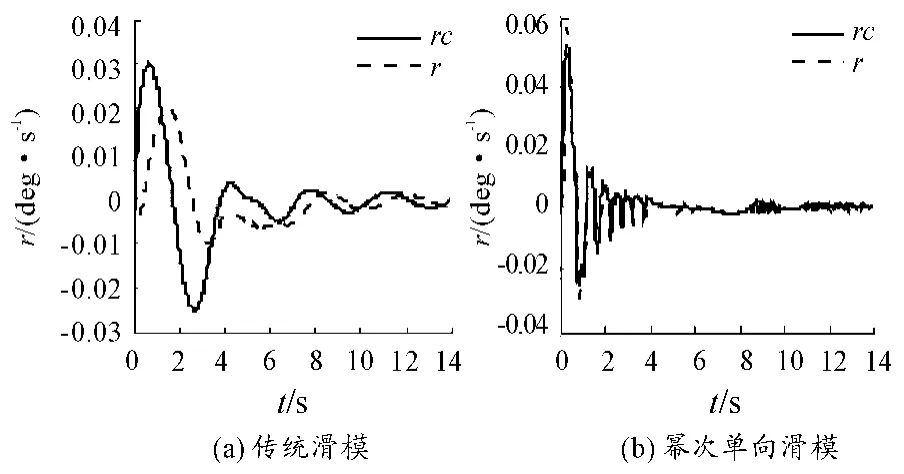
圖10 偏航角速度仿真圖
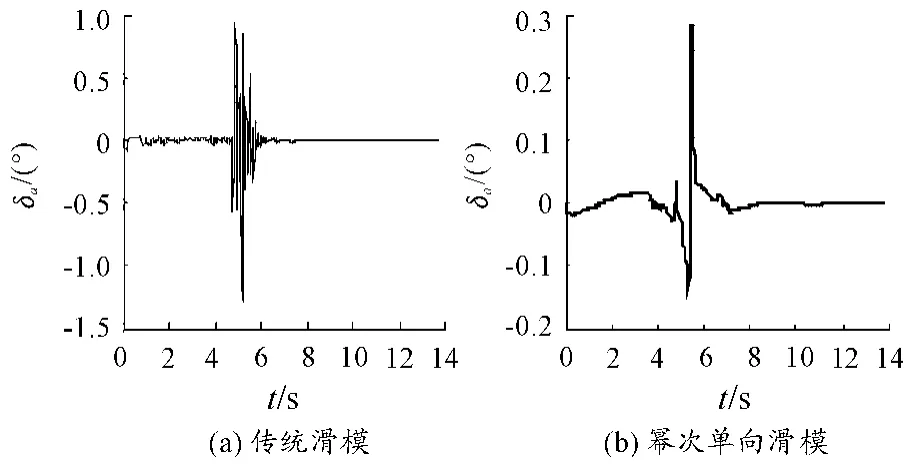
圖11 副翼偏角仿真圖
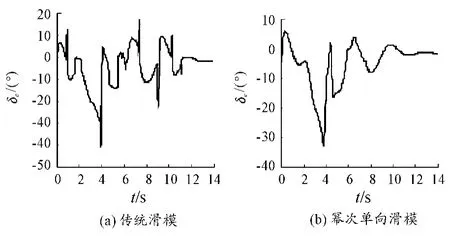
圖12 升降舵偏角仿真圖
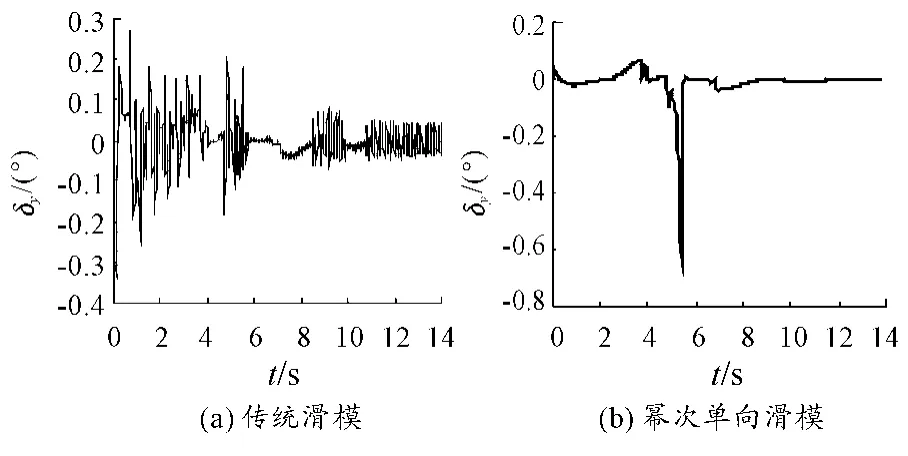
圖13 方向舵偏角仿真圖
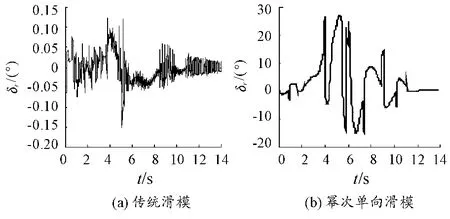
圖14 推力矢量側(cè)向偏角仿真圖
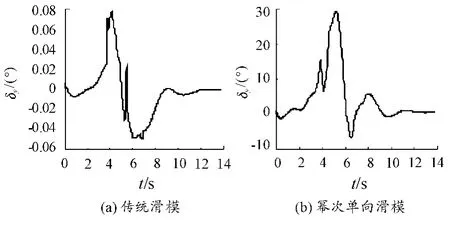
圖15 推力矢量縱向偏角仿真圖
仿真結(jié)果分析:
由圖5~圖10,姿態(tài)角和姿態(tài)角速度跟蹤仿真曲線可知,兩種控制器都可以較準(zhǔn)確、快速的跟蹤參考指令信號,由圖5迎角仿真曲線,可知,基于冪次趨近律的單向輔助面滑模能夠更準(zhǔn)確、快速的跟蹤上參考迎角指令。由圖6,側(cè)滑角仿真跟蹤曲線,可知,傳統(tǒng)滑模控制器側(cè)滑角曲線圖7(a),抖振比較明顯,收斂速度較慢,而基于冪次趨近律的單向輔助面滑模控制的側(cè)滑角曲線圖7(b),在0~2 s內(nèi)抖振較明顯,2~4 s略微有抖振,4 s以后能較快速的收斂。體現(xiàn)出基于冪次趨近律的單向輔助面滑模控制器良好的抗抖振性及快速收斂性。
圖8、圖9、圖10分別為傳統(tǒng)滑模和基于冪次趨近律的單向輔助面滑模控制器滾轉(zhuǎn)角速度p、俯仰角速度q、偏航角速度r仿真曲線,可知p、q、r均在迎角達(dá)到極大值時而達(dá)到極大值。之后,隨著迎角的減小而不斷減小。由此可知兩種控制算法下的仿真模型是正確的。由上述角速率仿真圖比較可知,基于冪次趨近律的單向輔助面滑模控制器跟蹤控制效果較好。
圖11、圖12、圖13、圖14、圖15分別為副翼偏角、升降舵偏角、方向舵偏角、推力矢量側(cè)向偏角、推力矢量縱向偏角,表明兩種控制方法的控制舵面均在合理偏轉(zhuǎn)范圍。由于眼鏡蛇機動為大迎角飛行機動,通過控制舵面響應(yīng)曲線可知,基于控制力矩的分配,隨著角度的增加,需要氣動舵面和推力矢量共同控制殲擊機超機動動作。其中,由圖12可知基于冪次趨近律的單向輔助面滑模控制下的升降舵曲線變化更平穩(wěn),抖振較小,而傳統(tǒng)滑模控制器的升降舵偏角曲線有明顯的抖振,由此亦可以證明冪次趨近律的單向輔助面滑模控制器抗抖振效果要優(yōu)于傳統(tǒng)滑模。
4 結(jié)束語
本文引入了基于冪次趨近律單向輔助面滑模控制算法用于無人戰(zhàn)斗機非線性控制,根據(jù)響應(yīng)時間將無人戰(zhàn)斗機的控制回路分為快回路和慢回路,分別由冪次趨近律單向輔助面滑模控制方法設(shè)計了控制器,通過仿真驗證發(fā)現(xiàn),該方法用于無人戰(zhàn)斗機控制有較好效果。雖然冪次趨近律單向輔助面滑模控制對抖振的抑制較傳統(tǒng)滑模要好,但也有一定的抖振,在實際的工程應(yīng)用中需要進(jìn)一步考慮系統(tǒng)抖振的抑制。
[1]龍威林.無人機的發(fā)展與應(yīng)用[J].產(chǎn)業(yè)與科技論壇,2014(8):15-21.
[2]席慶彪,袁冬莉,閆建國.無人機橫側(cè)向飛行控制系統(tǒng)研究[J].飛行力學(xué),2004(4):71-75.
[3]郭艷艷,陳瀾,楊常偉.無人機著陸抗風(fēng)魯棒H∞控制器設(shè)計研究[J].計算機測量與控制,2010(2):67-72.
[4]陶洪峰,胡壽松.具有飽和死區(qū)非線性輸入的自適應(yīng)滑模跟蹤控制[J].信息與控制,2009,38(3):112-116.
[5]于媛媛,吳慶憲,姜長生.基于冪次趨近律的單向輔助面滑模控制[J].電光與控制,2014(4):49-54.
[6]魯可.無人戰(zhàn)斗機著艦飛行控制研究[D].南京:南京航空航天大學(xué),2013.
[7]任澤玉.先進(jìn)殲擊機超機動飛行運動建模與控制研究[D].南京:南京航空航天大學(xué),2013.
[8]Utkin VI.Sliding mode control design principles and applications to electric drives.IEEE Transactions on Industrial Electronics,1993
[9]張聰,田福禮,劉超,等.超機動飛機飛行控制及大迎角飛行品質(zhì)研究[J].航空工程進(jìn)展,2011(4):127-132.
[10]文傳源.現(xiàn)代飛行控制[M]北京:北京航空航天大學(xué)出版社,2004:243-247.
[11]張明廉.飛行控制系統(tǒng)[M].北京:航空工業(yè)出版社,1994.
[12]陳哨東,孫隆和.先進(jìn)無人戰(zhàn)斗機(UCAV)系統(tǒng)概念[J],火力與指揮控制,2003(6):74-79.
[13]Slotine J J,Sastry S S.Tracking control of nonlinear systems using sliding surfaces with application to robot manipulators[J].International Journal of Control,1983.
(責(zé)任編輯楊繼森)
Based on Sliding Mode Control with Unidirectional Auxiliary Surfaces of UAV Attitude Controller Design and Simulation
LYU Hai-long
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
According to the requirements of UCAV flight control quality,the application of a kind of unidirectional auxiliary plane sliding mode control based on the exponential reaching law method was used to solve nonlinear control under the state of UCAV maneuvering flight problems.UCAV was established by the six degrees of freedom mathematical model.Then the general structure of the control system was constructed,and according to the exponential reaching law one-way auxiliary plane sliding mode control method,we designed the system inside and outside loop attitude controller.Finally the simulation was verified. The simulation results show that the designed controller has good control effect,which ensures the security and stability in the process of UAV maneuvering flight,and has better ability to resist chattering compared to the conventional sliding mode control method.
UCAV;flight control;sliding mode control;simulation
呂海龍.一種基于單向輔助面滑模控制的無人機姿態(tài)控制器設(shè)計與仿真[J].四川兵工學(xué)報,2015(11):112-117.
format:LYU Hai-long.Based on Sliding Mode Control with Unidirectional Auxiliary Surfaces of UAV Attitude Controller Design and Simulation[J].Journal of Sichuan Ordnance,2015(11):112-117.
V249
A
1006-0707(2015)11-0112-06
10.11809/scbgxb2015.11.030
2015-04-15
呂海龍(1983—),男,碩士研究生,主要從事無人機飛行控制研究。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
