SAR-GMTI中擴(kuò)展目標(biāo)跟蹤
2015-11-26 06:20:15武江濤白森
兵器裝備工程學(xué)報 2015年11期
武江濤,白森
(中國空空導(dǎo)彈研究院,河南洛陽471000)
SAR-GMTI中擴(kuò)展目標(biāo)跟蹤
武江濤,白森
(中國空空導(dǎo)彈研究院,河南洛陽471000)
對地面運(yùn)動目標(biāo)進(jìn)行檢測時,目標(biāo)的運(yùn)動會導(dǎo)致目標(biāo)的擴(kuò)展,從而占據(jù)多個距離-方位單元。針對傳統(tǒng)目標(biāo)跟蹤方法跟蹤精度不高、甚至發(fā)散的情況,分析了目標(biāo)擴(kuò)展情況與目標(biāo)運(yùn)動狀態(tài)的關(guān)系,將擴(kuò)展信息加入到狀態(tài)方程中,提出了基于擴(kuò)展跟蹤波門的跟蹤方法,將波門建模為目標(biāo)擴(kuò)展信息的函數(shù),從而充分利用了目標(biāo)的擴(kuò)展信息,仿真結(jié)果表明,該算法能較好地跟蹤擴(kuò)展目標(biāo),并能有效地提高跟蹤精度。
擴(kuò)展目標(biāo);跟蹤波門;目標(biāo)狀態(tài)
在傳統(tǒng)跟蹤方法中,目標(biāo)假設(shè)為點目標(biāo),只占據(jù)一個分辨單元,但在現(xiàn)代跟蹤系統(tǒng)中,目標(biāo)會出現(xiàn)占據(jù)多個分辨單元的情況,稱該類目標(biāo)位擴(kuò)展目標(biāo)。例如,高分辨雷達(dá)中目標(biāo)尺寸較大、編隊目標(biāo)、長時間相干積累導(dǎo)致的距離走動以及參數(shù)不匹配導(dǎo)致散焦等都會導(dǎo)致目標(biāo)占據(jù)多個分辨單元。如果把目標(biāo)繼續(xù)作為點目標(biāo)處理,就會漏掉許多有用的特征信息,甚至?xí)?dǎo)致檢測漏報和跟蹤發(fā)散。
對于擴(kuò)展目標(biāo),國內(nèi)外已經(jīng)有許多研究成果。文獻(xiàn)[1]中針對平面運(yùn)動的艦船類目標(biāo),將目標(biāo)形狀建模為一個橢圓,將目標(biāo)長度信息加入到狀態(tài)向量中;文獻(xiàn)[2]中討論了擴(kuò)展目標(biāo)散射點的空間分布情況,采用多假設(shè)卡爾曼濾波器的方法實現(xiàn)擴(kuò)展目標(biāo)跟蹤;文獻(xiàn)[3]中提出了基于最大似然比的擴(kuò)展目標(biāo)跟蹤算法,研究了目標(biāo)發(fā)生旋轉(zhuǎn)時的跟蹤情況;文獻(xiàn)[4]中比較了點目標(biāo)和擴(kuò)展目標(biāo)的異同點,并采用檢測前跟蹤思想對擴(kuò)展目標(biāo)進(jìn)行了跟蹤檢測。
以上方法所針對的擴(kuò)展情況與目標(biāo)形狀,散射點分布有關(guān)而與目標(biāo)運(yùn)動狀態(tài)無關(guān)。本研究主要針對SAR-GMTI中由于相干積累時間較長且運(yùn)動目標(biāo)參數(shù)不匹配,從而引起距離走動及方位散焦,因而目標(biāo)的擴(kuò)展情況是與運(yùn)動狀態(tài)緊密聯(lián)系的。針對該種擴(kuò)展情況,在分析了目標(biāo)擴(kuò)展與運(yùn)動狀態(tài)關(guān)系后,首先,建立了基于擴(kuò)展信息的目標(biāo)狀態(tài)模型與量測模型,然后詳細(xì)闡述了本研究所提的擴(kuò)展跟蹤波門方法的原理及步驟,最后給出了仿真實驗及分析,驗證了所提方法的正確性。
1 目標(biāo)狀態(tài)與量測方程
1.1 狀態(tài)模型
考慮目標(biāo)在x-y平面內(nèi)勻速運(yùn)動,載機(jī)以速度v,高度h沿x軸飛行,定義目標(biāo)的狀態(tài)向量為,Wk,Lk分別表示k時刻距離向與方位向的擴(kuò)展長度,(xk,yk)分別是目標(biāo)中心的位置和速度。該系統(tǒng)的狀態(tài)方程描述為

其中,過程噪聲Vk是加性零均值白噪聲,方差為E[VkV'j]=Qkδkj。
可以看出,由于引入了擴(kuò)展信息,狀態(tài)方程是一個非線性的方程。非線性方程形式如下

其中:T為時間間隔;l,g為擴(kuò)展信息隨運(yùn)動狀態(tài)的變化函數(shù)。由于引入的擴(kuò)展部分是由目標(biāo)運(yùn)動參數(shù)決定的,而目標(biāo)運(yùn)動狀態(tài)部分是線性變化的,因此可以采用卡爾曼濾波方法先計算運(yùn)動狀態(tài)部分,進(jìn)而由函數(shù)l,g求出擴(kuò)展部分。關(guān)于SAR-GMTI下運(yùn)動目標(biāo)散焦與距離走動的原理分析及推導(dǎo)在許多文獻(xiàn)中都有詳細(xì)的描述,這里直接采用文獻(xiàn)[5-6]中給出的結(jié)論,在不考慮加速度條件下的簡化結(jié)果如下:
距離走動

散焦

其中:ρa(bǔ)為方位向分辨率;λ為波長大小;R為雷達(dá)距目標(biāo)斜距

1.2 量測模型
這里考慮經(jīng)過CFAR處理前的量測值,采用文獻(xiàn)[7]中給定的模型,不同的是這里采用的是笛卡爾坐標(biāo)系,而不是極坐標(biāo),且要考慮方位向散焦引起的擴(kuò)展。量測值是距離-方位上的回波強(qiáng)度,距離、方位被分為Nr,Na個單元。距離和方位的分辨率分別為Δr,Δa。用來表示距離-方位上的分辨單元集合。對于距離向,由于目標(biāo)的擴(kuò)展,目標(biāo)回波所占據(jù)距離單元可以表示為

對于方位向,與距離向類似,由于目標(biāo)方位向擴(kuò)展,目標(biāo)回波所占據(jù)的方位單元可以表示為

這里假設(shè)每個單元的量測值相互獨(dú)立且服從瑞利分布。則對于第(i,j)個量測單元的幅度信息zk(i,j),i=1,…,Nr,j=1,…,Na,有以下結(jié)論:
當(dāng)目標(biāo)不存在于這個單元時,其統(tǒng)計分布滿足

當(dāng)目標(biāo)存在于這個單元時,其統(tǒng)計分布滿足

其中:λ反映了目標(biāo)的信噪比;而σ2反映了背景噪聲的強(qiáng)度。
2 點擴(kuò)展目標(biāo)跟蹤算法
在傳統(tǒng)單目標(biāo)跟蹤方法中,落入跟蹤波門的回波多于一個時,這些候選回波只有一個來自目標(biāo),其余均是由虛警或者雜波產(chǎn)生[8-10]。但是,在目標(biāo)量測值占據(jù)多個分辨單元時,落入波門的量測值可能均來自目標(biāo),這樣,必須對傳統(tǒng)的跟蹤波門改進(jìn)[10-14],本研究提出了擴(kuò)展跟蹤波門的概念,在設(shè)置跟蹤波門時,將跟蹤波門的大小設(shè)置為擴(kuò)展的函數(shù),即,即波門大小隨著目標(biāo)擴(kuò)展的情況變化而變化,而目標(biāo)的擴(kuò)展是跟隨目標(biāo)狀態(tài)變化的,從而落入波門內(nèi)的回波集合是與目標(biāo)運(yùn)動狀態(tài)相關(guān)的,該模型充分利用目標(biāo)的擴(kuò)展信息,進(jìn)而提高跟蹤的穩(wěn)定性。對落入擴(kuò)展跟蹤波門的回波進(jìn)行處理過程如下:假設(shè)Z(k)表示k時刻落入擴(kuò)展跟蹤波門的回波集合,可以表示為

其中,nk是跟蹤波門內(nèi)的候選回波數(shù),將所有的候選回波作為目標(biāo)的回波集合,并計算目標(biāo)的質(zhì)心位置,計算方法為

3)對預(yù)測的狀態(tài)向量Xk+1,利用公式變換得到距離-方位平面內(nèi)的量測預(yù)測值;
4)利用第二步得到的擴(kuò)展信息,得到擴(kuò)展跟蹤波門γk+1=f(Wk+1,Lk+1),得到落入波門內(nèi)的量測集合;
6)更新目標(biāo)運(yùn)動方程及協(xié)方差矩陣,重復(fù)步驟2)~6)。
3 仿真結(jié)果及分析
雷達(dá)仿真參數(shù)如下:載頻為1 GHz,天線孔徑為10 m,帶寬為50 MHz,測距誤差為3 m,合成孔徑時間為1 s,重返時間為3 s,高度為5 000 m,觀測區(qū)域距離向為6 000~15 000 m,方位向為0~900 m,載機(jī)速度為80 m/s。
目標(biāo)運(yùn)動參數(shù)如下:目標(biāo)沿直線運(yùn)動,初始運(yùn)動狀態(tài)為(50,5,5 000,3),共仿真50個周期,圖1給出了在信噪比為21 dB,虛警率為10-4條件下,全部點跡原始數(shù)據(jù),圖2給出了第10個周期的原始點跡數(shù)據(jù)。可以看出目標(biāo)的擴(kuò)展隨著目標(biāo)運(yùn)動狀態(tài)的變化而變化的情況。
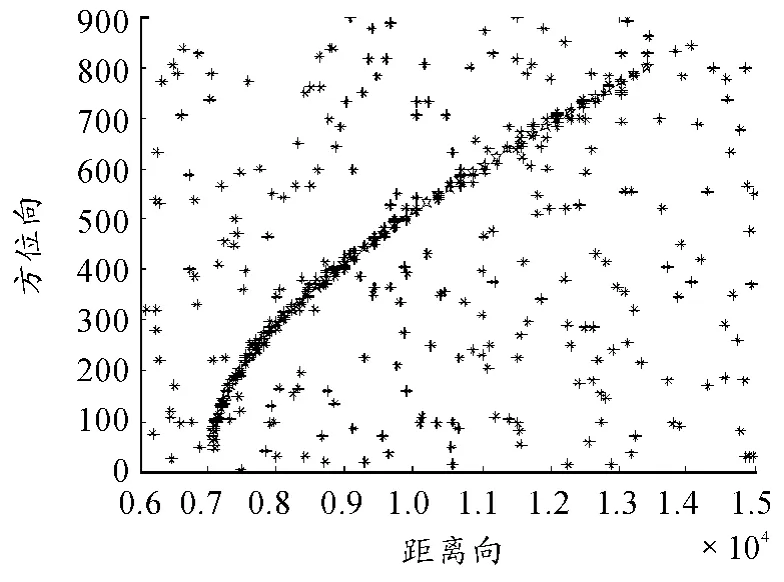
圖1 目標(biāo)全部50幀原始點跡

圖2 目標(biāo)第10幀原始點跡
為了對比本文方法與最近鄰域濾波及強(qiáng)近鄰域濾波跟蹤方法的優(yōu)劣,在信噪比為22dB,虛警率為10-4條件下進(jìn)行了50次蒙特卡洛實驗。圖3給出了某次蒙特卡洛實驗跟蹤結(jié)果對比圖,圖4給出了跟蹤誤差大小。可以看出,本研究提出的擴(kuò)展目標(biāo)跟蹤方法要優(yōu)于最近鄰域跟蹤方法及強(qiáng)近鄰域跟蹤方法,這是由于充分利用了目標(biāo)擴(kuò)展信息的結(jié)果。
最后分析了在信噪比變化下目標(biāo)穩(wěn)定跟蹤的概率大小,進(jìn)行了50次蒙特卡洛實驗,實驗統(tǒng)計了在不同信噪比下目標(biāo)跟丟的次數(shù),表1給出了跟蹤結(jié)果。可以看出,本文所提方法相比其他方法的穩(wěn)定跟蹤程度較高。
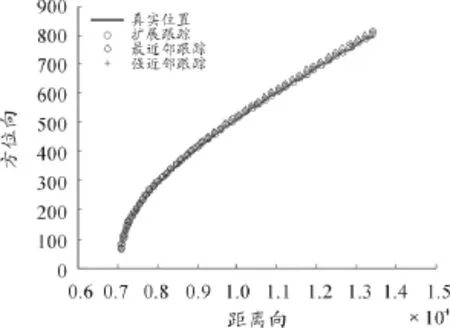
圖3 3種方法跟蹤結(jié)果對比

圖4 3種方法誤差對比

表1 目標(biāo)跟丟次數(shù)隨信噪比的變化(在50次蒙特卡洛實驗下,swerling 0模型)
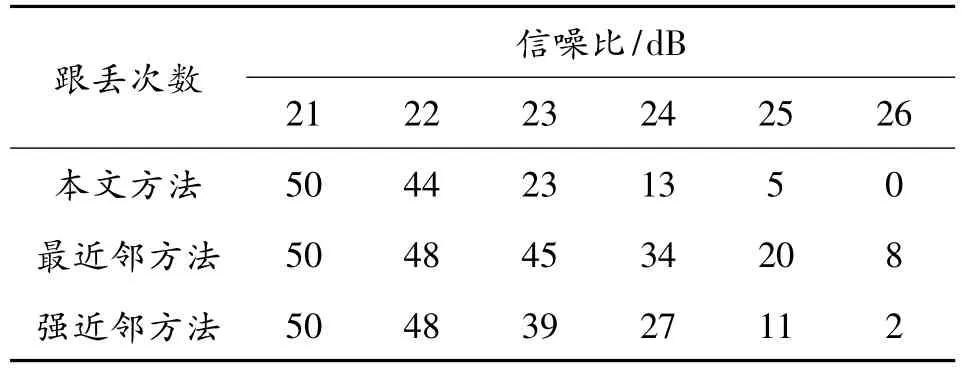
表2 目標(biāo)跟丟次數(shù)隨信噪比的變化(在50次蒙特卡洛實驗下,swerling 2模型)
4 結(jié)論
本研究對隨目標(biāo)運(yùn)動狀態(tài)變化的擴(kuò)展目標(biāo)進(jìn)行了分析,將擴(kuò)展信息加入到目標(biāo)狀態(tài)方程中,并提出了擴(kuò)展跟蹤波門的概念,利用隨目標(biāo)運(yùn)動狀態(tài)變化而變化的擴(kuò)展波門,可以充分利用目標(biāo)的擴(kuò)展信息,該方法解決了傳統(tǒng)跟蹤方法由于忽略目標(biāo)的擴(kuò)展信息,從而導(dǎo)致跟蹤精度不高且易跟蹤發(fā)散的問題,仿真表明,該方法能明顯提高跟蹤精度及跟蹤穩(wěn)定性。下一步工作將針對目標(biāo)存在距離、方位向加速度時,擴(kuò)展較嚴(yán)重時的情況進(jìn)行研究。
[1]Salmond D J,Parr MC.Track maintenance using measurements of target extent[J].IEE Proceedings-Radar,Sonar and Navigation,2003,150(6):389-395.
[2]Vermaak J,Ikoma N,Godsill S J.Sequential Monte Carlo framework for extended object tracking[J].IEEE Proc.Radar Sonar Navigation.,2005,152(5):353-363.
[3]Gilholm K,Salmond D.Spatial distribution model for tracking extended objects[J].IEEE Proc.-Radar Sonar Navigation,2005,152(5):364-371.
[4]TSOU Haiping,YAN T Y.The extended-image tracking technique based on the maximum likelihood estimation[R]. Jet Propulsion Laboratory California Institute of Technology,1999.
[5]Boers Y.A track before detect algorithm for tracking extended targets[J].Radar Sonar and Navigation,2006,153(4):345-351.
[6]RANEY R K.Synthetic Aperture Imaging Radar and Moving Targets[J].IEEE Trans on Aerospace and Electronic Sysems,1971,AES-7(3):499-505.
[7]李瑞英.合成孔徑雷達(dá)運(yùn)動目標(biāo)檢測與成像[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[8]保錚,刑孟道,王彤.雷達(dá)成像技術(shù)[M].北京:電子工業(yè)出版社,2005.
[9]丁鷺飛,耿富錄.雷達(dá)原理[M].西安:西安電子科技大學(xué)出版社,2002.
[10]于洪波,王國紅,王娜.基于粒子濾波的擴(kuò)展目標(biāo)檢測前跟蹤算法[J].電光與控制,2010,17(8):41-44.
[11]魏濤.SAR運(yùn)動目標(biāo)檢測與運(yùn)動參量估計方法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2009.
[12]武杰.SAR地面運(yùn)動目標(biāo)檢測方法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2008.
[13]李杰,向敬成,黃順吉.合成孔徑雷達(dá)慢運(yùn)動目標(biāo)成像處理的研究[J].電子科技大學(xué)學(xué)報,1995,24(2):119 -125.
[14]何友.雷達(dá)數(shù)據(jù)處理[M].北京:電子工業(yè)出版社,2006.
(責(zé)任編輯楊繼森)
Extended Target Tracking In SAR-GMTI
WU Jiang-tao,BAI Sen
(China Airborne Missile Academy,Luoyang 471000,China)
When detecting the target which is moving on the ground will leads to target extended,then the target will occupy multi range-azimuth units.Traditional target tracking method leads to low precision and divergence,and in order to solve this problem,we analyzed the relation between target extended and the moving state of the target,and added the extended information into the state equation,then put forward the method based on extended tracking gate,which model the gate into a function of target extended information and can use the target extended information sufficiently.The simulation result shows that the algorithm can tracking the target better and increase the tracking accuracy.
extended target;tracking gate;target state
武江濤,白森.SAR-GMTI中擴(kuò)展目標(biāo)跟蹤[J].四川兵工學(xué)報,2015(11):108-111.
format:WU Jiang-tao,BAI Sen.Extended Target Tracking In SAR-GMTI[J].Journal of Sichuan Ordnance,2015(11):108-111.
TN958.2
A
1006-0707(2015)11-0108-04
10.11809/scbgxb2015.11.029
2015-06-28
武江濤(1989—),男,碩士,助理工程師,主要從事目標(biāo)跟蹤研究。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
