無人機捷聯慣性/全光自主組合導航系統研究
2015-11-26 06:19:57楊春雷
兵器裝備工程學報 2015年11期
楊春雷
(中國科學院長春光學精密機械與物理研究所,長春130033)
無人機捷聯慣性/全光自主組合導航系統研究
楊春雷
(中國科學院長春光學精密機械與物理研究所,長春130033)
針對無人機自主導航的應用需求,分析了星光敏感器和圖像視覺導航單元各自性能并進行組合,構建了全光導航系統;再在傳統組合導航基礎上,與捷聯慣導系統進行耦合,構建了捷聯慣性/全光自主組合導航系統,確保在常規狀態下可實現高精度導航;同時對無衛星定位系統支持狀態下的捷聯慣性/全光組合導航系統的導航定位能力進行了性能仿真測試;通過測試驗證了在非常規狀態下,無人機可獨立依靠捷聯慣性/全光導航系統實現自主導航,克服衛星導航系統失效等問題完成各項任務。
組合導航系統;無人機;自主;捷聯慣導;全光導航
現代化戰爭對于無人機性能的需求越來越高,傳統被動感知的組合導航過于依賴外部的地面和空中導航設備(GPS、BD等)而易受環境和敵方干擾,在未來信息戰爭中將處于劣勢地位[1]。隨著人工智能和信息技術的快速發展,為進一步提高無人機生存和自主作戰能力,需要無人機能夠更加獨立自主地感知環境并完成導航任務[2-3]。因此,近年來各國均在傳統組合導航基礎上繼續發展各類自主導航系統,特別是捷聯慣性/星光自主導航等系統以其出色的抗干擾性和自主智能性能而得到廣泛研究[4-6]。
而隨著計算機視覺、光學系統設計與攝像測量的交叉發展,在原有星光導航的基礎上,基于視覺信息的全光自主導航技術也成為一個新的研究熱點[7]。全光自主導航系統利用機載光電探測設備實時感知周邊環境信息,通過星敏感器進行觀測定位[8],再結合視覺導航技術與當前組合導航系統進行深耦合,實現全天候、高精度、高可靠自主飛行,且可以不依賴于地面和空中外部導航設備,在電子對抗和提高自主化程度方面具有較大優越性。
在綜合上述成果的基礎上,本文進一步研究了捷聯慣性/全光組合導航系統,使其在常規環境下與傳統組合導航進行耦合,確保高精度導航;在衛星導航系統失效的狀態下,依靠主動感知進行獨立自主導航,并對該導航效果進行了仿真分析。
1 全光組合導航
全光導航(all optic navigation system,AONS)一直被視為最優發展的導航技術之一。20世紀60年代出現了高精度的星體自動跟蹤設備,能在白天觀測三等星、夜晚觀測七等星,并帶有自動尋星、搜索和跟蹤等功能,其精度較高,能跟蹤多顆恒星,并對磁場不敏感,因而在80年代衛星定位技術成熟之前是最為常用的導航方式之一。但由于當時軟硬件技術的不成熟,該技術的發展受到了很大限制。隨著新世紀現代化信息戰爭的到來和圖像處理軟硬件技術的高速發展,星光導航系統由于其自主隱蔽等優勢又重新成為了導航發展的熱點,同時圖像處理技術也日趨成熟。本文在綜合分析研究星光導航的基礎上,通過引入雙目視覺定位導航系統,構建了可獲得高精度的全光導航系統,并與慣導系統相結合,實現自主導航功能。
1.1 星光導航
星光導航(celestial navigation system,CNS)是通過對星體的觀測數據來獲取載體的姿態和位置,相對于地球慣性坐標系(earth inertial coordinate,EIC),恒星運動緩慢,因此在地球慣性坐標系中恒星是視為靜止的。依據載體測量的星光矢量即可計算出飛行器相對于觀測星的角度,如圖1所示。

圖1 地球慣性系下星光矢量分量
進而可計算出飛行器的姿態角,從而實現載體定位,其在地球慣性系中的位置為

式(1)中:RA為恒星赤道經度,DE為赤道緯度。在飛行器載體坐標系中,星光矢量可以通過從地球慣性系到載體測量坐標系轉換矩陣來實現,即

根據上述式子及圖1所示的坐標系轉換間關系,從地球慣性坐標系到導航坐標系(選取地理坐標系)的坐標變換矩陣如式(3)所示
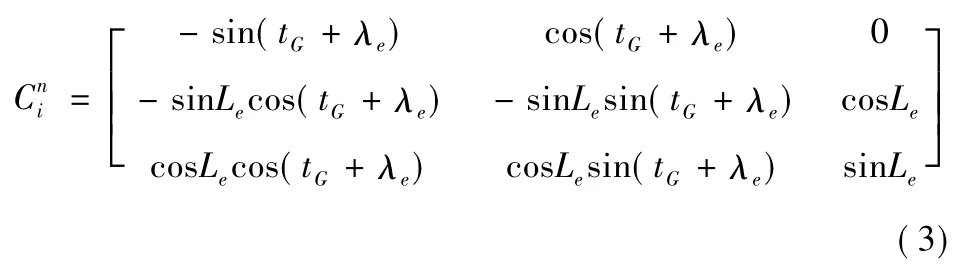
式(3)中:tG=tG0+ωiet;tG0是格林尼治時間角;λe0是格林尼治地理經度;λe為當前時刻的地理經度;Le是當前時刻的地理緯度;ωie是地球的自轉角速度,通常取72.921 15 μrad/s。
1.2 雙目視覺定位導航
雙目視覺定位導航系統是通過兩個相機通過特征提取,獲得同一目標并進行同步計算工作的,它不需要激光測距儀或其他測距裝置,根據三角測距原理[9]來測定距離的。取兩個圖像定位系統中的某一個的攝像機鏡頭中心為原點建立地面坐標系,坐標系的x軸上安裝另一個圖像定位系統,設兩個圖像定位系統的相機鏡頭中心的距離為s。兩個視覺定位系統分別獨立工作,將各自測得相對俯仰角和方位角進行綜合,并根據相機間軸距,計算目標相對于相機的位置。雙目視覺定位導航的空間定位原理如圖2所示。

圖2 雙目視覺導航定位原理圖
圖2中A點為定位特征所在的位置,o1o2=s,α1,α2,β1,β2可結合星光導航信息,從兩個視覺定位系統中通過圖像標定而直接獲取。結合圖2和標定算法,無人機雙目視覺定位算法其對應的求解過程如下

可得

從而可以得到導航參數

通過上述公式,即可計算出無人機的空間位置,再配合星光導航提供的信息即可實現無人機全光導航。
2 捷聯慣導/全光組合導航
雖然全光導航可在理論上完成自主導航任務,但其精度仍受天氣等影響,需要與捷聯慣導系統進行耦合,以提高精度和適應性。捷聯慣導/全光組合導航系統的基本原理,就是將已知星體相對于理想參考系的角度通過處理得到的計算值與實際星敏儀的測量值進行比較,取其差值作為組合導航系統誤差的觀測值,并以此對慣導系統進行修正,同時利用雙目視覺定位信息與姿態轉換矩陣進行耦合,進而提高導航的精度。本文捷聯慣導/全光組合導航系統使用星光導航系統的主要目的是利用星光信息測量平臺坐標系OXaYaZa相對于導航坐標系OXiYiZi的姿態失準角(φx,φy,φz),其作用相當于一個漂移很小的穩定陀螺,而使用雙目定位信息并與慣導進行耦合則可進一步提高獲取的位姿精度,該系統架構如圖3所示。
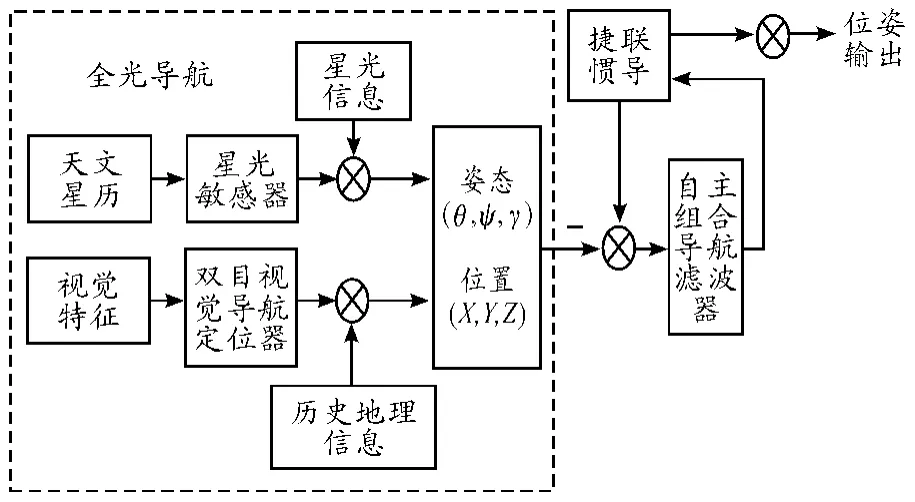
圖3 捷聯慣導/全光組合導航系統架構框圖
當飛行器所攜帶的全光導航系統在有效視場范圍內成功將導航星及定位特征點進行捕獲,并經星光及歷史信息圖像識別之后,即可通過定位算法獲取當前的導航星光矢量,該導航星光矢量特征可表示為

理論星光矢量觀測值為

理論值ps與實際觀測值rs之間的偏差為:

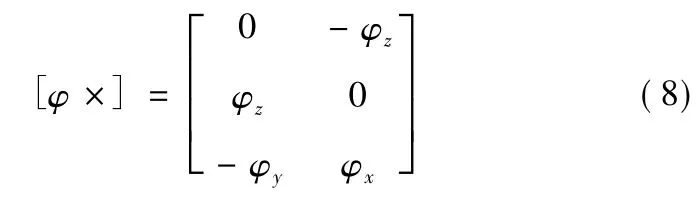
依據實際觀測矢量與理論矢量之差,可以推導出姿態失準角φ,其中,[rn×]是由rn的分量所構成的反對稱矩陣。在坐標轉換矩陣中,n'代表計算得到的平臺坐標系,與由真實姿態角得到的姿態轉換矩陣(即捷聯矩陣)之間存在偏差,n系與n'系的轉換關系由得到。
再將組合導航濾波器的狀態向量經過Kalman濾波處理,并考慮星敏儀安裝矩陣即可實現捷聯慣導與全光導航的組合。
3 仿真測試
根據無人機自主導航的需求,在無衛星定位系統的基礎上,設置相應的仿真初始條件,隨機設置對應的初始姿態角誤差Δθ(0),Δψ(0),Δγ(0)在[-1'~1']范圍內;隨機設置對應的初始位置誤差ΔX(0),ΔY(0),ΔZ(0)在[-10 m~10 m]范圍內,并結合規劃航跡和視景仿真系統選取一條按周期機動變化的載體模擬運動軌跡對本文捷聯慣性/全光導航系統進行仿真測試,結果如圖4、圖5所示。

圖4 捷聯慣導/全光組合導航姿態誤差仿真測試結果
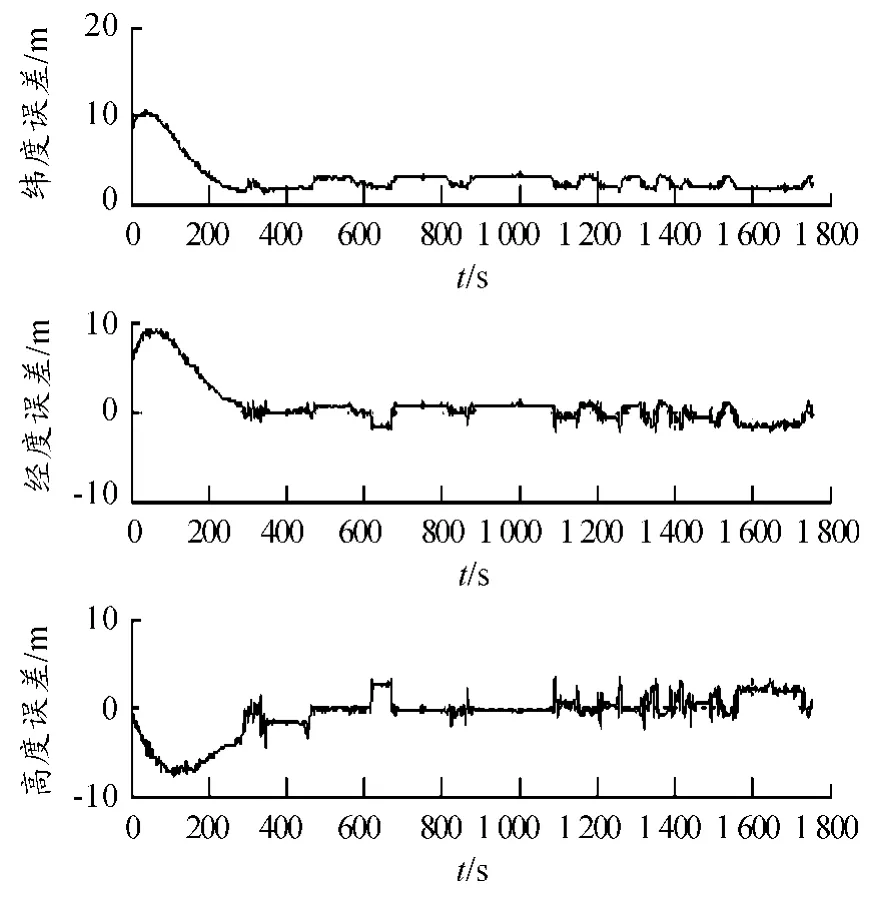
圖5 捷聯慣導/全光組合導航位置誤差仿真測試結果
由圖4、圖5可見,將所得姿態及位置估計曲線與理論軌跡進行對比,對應的姿態失準角穩態誤差一般在±0.3'左右,對應的位置穩態誤差在±5 m以內,且收斂速度較快,能夠滿足無人機自主導航系統的需求。
4 結論
本文首先分析了現代無人機對自主導航的發展以及需求;之后,在傳統星光導航的架構上,引入了雙目視覺感知定位系統,并將上述兩者進行組合,構建了全光組合導航系統;在此基礎上,分析了捷聯慣導的原理和特性,研究了捷聯慣導與全光導航的組合導航原理以及對應的系統狀態方程和觀測方程,并進行了系統推導和詳細分析;最后結合上述模型進行了仿真分析,測試了該自主導航的性能。通過分析仿真結果,證實捷聯慣導/全光組合導航系統可以較精確地獲取載體位置及姿態信息,同時由于其具備自主隱蔽性,因此在未來信息化戰爭中必然具有更大的適用范圍和使用優勢。
[1]Gul F,Fang Jiancheng.Alternate of GPS for ballistic vehicle navigation[C]//Proceedings of the 1st International Symposium on Systems and Control in Aerospace and Astronautics,2006:19-24.
[2]韓景壯,厲明,周凌.無人機視景仿真平臺設計與實現[J].計算機測量與控制,2014,22(5):1527-1529.
[3]王巖.一種星敏感器與捷聯慣導高精度安裝誤差標定方法[J].戰術導彈控制技術,2009,26(3):17-20.
[4]Farid Gul,Fang Jiancheng.En-route Alignment and Calibration of SINS by Celestial Observation and Distinctiveness of Free Fall Trajectory[C]//9th International Multi topic Conference,IEEE INMIC 2005.2005:l-6.
[5]陳海明,熊智,喬黎.天文-慣性組合導航技術在高空飛行器中的應用[J].傳感器與微系統,2008,27(9):4-6.
[6]趙長山,秦永元,夏家和.SINS/星敏感器組合導航方案研究[J].西北工業大學學報,2008,26(5):631-635.
[7]楊波,王躍鋼,徐洪濤.彈載慣性/衛星/星光高精度組合導航[J].中國慣性技術學報,2010,18(4):444-449.
[8]孫麗.激光捷聯慣導/星光/衛星容錯組合導航系統研究[D].西安:西北工業大學,2007.
[9]江晟,曲昭偉,胡宏宇.基于像素-角度映射的攝像機標定算法[J].哈爾濱工業大學學報,2012,44(8):130 -135.
[10]高娟,韓惠珍,白軍.SINS/GPS緊耦合與松耦合組合導航系統分析[J].四川兵工學報,2011,32(10):92-96.
(責任編輯周江川)
Research on SINS/AONS Autonomous Integrated Navigation System for UAV
YANG Chun-lei
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
According to the application requirements of autonomous navigation for UAV,all-optical navigation system(AONS)was constructed through the celestial navigation unit and image visual navigation unit.Then based on the traditional integrated navigation,the strap-down inertial navigation system(SINS)/ AONS autonomous integrated navigation system was carried out coupling with the SINS,which can provide the high precision navigation for UAV in the normal state.Meanwhile,the ability of SINS/ANOS integrated navigation system was tested by simulation and the navigation errors were analyzed in the state of the non-assistance of the satellite positioning system.The results show that in the abnormal situation,UAV can achieve autonomous navigation task depending on SINS/AONS integrated navigation system.And the precisions of position and attitude are accurate enough to overcome the loss problem of satellite navigation system.
integrated navigation system;UAV;autonomous;strap-down inertial navigation system;alloptical navigation system
楊春雷.無人機捷聯慣性/全光自主組合導航系統研究[J].四川兵工學報,2015(11):4-7.
format:YANG Chun-lei.Research on SINS/AONS Autonomous Integrated Navigation System for UAV[J].Journal of Sichuan Ordnance,2015(11):4-7.
TN967.2
A
1006-0707(2015)11-0004-04
10.11809/scbgxb2015.11.002
2015-07-10
中國科學院知識創新工程國防科技創新資金資助項目(YYYJ-1122)
楊春雷(1983—),男,博士,副研究員,主要從事無人機總體技術、無人機導航技術研究。
