一種自適應目標機動的αβγ濾波算法
2015-11-24 01:57:18張瑞謝敏雷瑛
大眾科技 2015年11期
張 瑞 謝 敏 雷 瑛
(西安電子工程研究所,陜西 西安 710100)
一種自適應目標機動的αβγ濾波算法
張 瑞 謝 敏 雷 瑛
(西安電子工程研究所,陜西 西安 710100)
針對傳統的α-β-γ濾波算法在跟蹤機動目標時性能下降的問題,文章提出一種自適應目標機動的α-β-γ濾波算法。該算法是基于多模型混合估計的思想,用殘差構建模型失配度,進而迭代更新模型概率,使跟蹤濾波器自適應地調節,達到更好的跟蹤效果。仿真結果表明,與傳統α-β-γ濾波算法相比,對于機動性較強的目標,該算法具有更好的跟蹤性能。
α-β-γ濾波;機動目標跟蹤;多模型混合估計
隨著自動化技術和人工智能技術的不斷發展,越來越多的無人飛行器,智能導彈和智能炮彈將出現在戰場中。以美軍的X-47B無人戰斗機為代表的先進無人機,擺脫了駕駛員生理承受力和反應力的限制,可以做到高速、高機動性。同時,計算機硬件設備性能的不斷提升支持著控制算法和軟件的不斷發展,可以預見未來的無人飛行器,智能導彈和智能炮彈將是具有復雜運動狀態的高機動目標。
所謂目標機動,是指目標的加速度的方向和幅度在短時間內出現急劇地變化,表現為急轉彎、急加速和急減速。針對目標的機動,傳統的α-β、α-β-γ和卡爾曼濾波算法均出現了性能下降,因此需要對適應高機動目標的跟蹤濾波算法進行研究。α-β和α-β-γ濾波算法由于增益計算量小,且可以離線計算,在工程中得到廣泛應用。但是由于增益固定,傳統的α-β和α-β-γ濾波算法對于機動目標的跟蹤性能下降明顯。本文提出一種基于多模型混合估計的自適應α-β-γ濾波算法,有效提高了對于機動目標的跟蹤性能。
1 α-β-γ濾波算法
α-β-γ濾波器實質上是運動方程為勻加速的卡爾曼濾波器的穩態解形式[1]。假設目標做勻加速直線運動,此時狀態向量為

其中,x1,x2,x3分別代表目標的位置、速度、加速度。
則系統的狀態方程為

噪聲w(k-1)為均值為0,協方差陣為Q的正態噪聲。量測方程為

則相應的卡爾曼濾波公式為

當卡爾曼濾波遞推足夠多步后,增益向量()H k將趨于常數向量H,即得到濾波公式

根據α-β-γ濾波與卡爾曼濾波的關系,如果卡爾曼濾波穩定后,預測協方差陣為
則α-β-γ濾波器的增益滿足

其中,R為量測噪聲的方差
由此可見,α-β-γ濾波對應著相應卡爾曼濾波的穩態解,增益系數不隨迭代改變,計算量小。但是傳統的α-βγ濾波器增益無法隨著目標的運動模型的改變而改變,固定的增益無法適應機動目標的跟蹤。
2 自適應多模型α-β-γ濾波算法
目前得到廣泛應用的目標跟蹤算法是卡爾曼濾波算法、α-β和α-β-γ濾波算法,但均在跟蹤機動目標時存在不足。對于卡爾曼濾波,當系統達到穩態時,其預測協方差將趨于極小值,使得濾波器的增益也趨于極小值,此時若狀態發生突變,殘差增大,預測協方差和濾波器的增益不能隨殘差同步改變[2]。而對于α-β和α-β-γ濾波算法,增益為常量,不隨殘差改變。因此,不具有對機動目標良好的跟蹤能力。針對這個問題,C.B.Chang和R.H.Whiting等人將可調白噪聲模型的思想應用于機動目標跟蹤。這種方法通過觀測目標濾波殘差的變化來判斷機動的產生與結束,并對濾波器進行相應的調整。但這種方法需要先人為設定門限,不同的門限對應不同的跟蹤性能。同時,該算法只適用于卡爾曼濾波,無法優化α-β和α-β-γ濾波算法。
在使用基于單模型的濾波算法進行機動目標跟蹤時,濾波模型需要先驗設定,但是先驗濾波模型不能較好地匹配目標的機動,因此其跟蹤效果往往不好,特別是當前目標機動能力日益增強,目標運動模式的結構、參數變化起伏很大,導致單模型算法很難及時準確地辨識機動參數,從而造成模型的不準確,而導致算法的性能下降[3]。為了適應目標機動,根據目標機動時殘差增大的特點,本文提出一種自適應多模型α-β-γ濾波算法:
2.1先驗濾波模型的確定
已知k時刻的殘差為

當目標非機動且濾波收斂時,根據α-β-γ濾波與卡爾曼濾波的關系,可知殘差的方差為

即, ()e k服從均值為0,方差為 11+PR的正態分布[3]。當目標機動時,殘差 ()e k為非平穩隨機過程,并且幅度急劇增大。
α-β-γ跟蹤濾波器的收斂速度和精度取決于增益系數α、β、γ的選取。在選取增益系數時,必須折中考慮噪聲特性與動態性能之間的平衡[1]。研究表明,最優增益系數應滿足如下關系[4]:

其中,ξ為平滑系數,也是系統特征方程的三重正實根。所以,在最優的情況下,可以利用平滑系數ξ來確定α、β、γ的值。不同的平滑系數ξ,決定了不同的濾波模型。由式(12)和式(15)可得

這說明,可以根據先驗參數R和 11P確定先驗平滑系數 1ξ。其中,R為量測噪聲方差, 11P為預測協方差陣的第一項,即目標位置的預測誤差的方差。由先驗設定確定的先驗平滑系數 1ξ代表著先驗α-β-γ濾波器模型。
2.2自適應多模型α-β-γ濾波算法原理
自適應多模型α-β-γ濾波算法的原理圖如圖1:

圖1 自適應多模型α-β-γ濾波算法的原理圖
多模型算法的關鍵是模型概率的計算。本文提出一種濾波模型失配度,用表示,計算公式為

式(19)也可以寫為

式(19)采用序貫式結構對各個時刻的殘差幅度加權地進行積累,得到濾波模型失配度。從中可以看出是迭代計算的,因此不需要存儲大量數據。為了增加新數據的權重, 1h通常取小于1的正數,作為衰減因子。

式(20)表示,濾波模型失配度越大,則濾波器的模型概率越小。在得到 k時刻的濾波器集合的模型概率后,就可以混合估計k時刻的濾波值

通過式(21)可以看出,算法自適應地控制了各個濾波器的權重,使得對目標跟蹤性能較好的濾波器權重加大,對目標跟蹤性能較差的濾波器權重減小。
2.3仿真分析
如果由先驗信息知道量測噪聲方差 R為 100m2,目標的跟蹤誤差的方差為 25m2,則由此計算得0.9283 =。進而計算得系數。如果采樣間隔設定為 T=0.5s,則初始濾波模型的增益向量為。
對目標的跟蹤一般都是多維上同時跟蹤濾波,只有每一維上跟蹤效果都好,整體的跟蹤效果才能好。本文仿真對一個運動目標在 X軸這一維上的跟蹤濾波。目標的起始點在10000m處,起始量測值為10020m,目標在X軸這一維上的運動狀態如表1所示:

表1 運動狀態
使用初始α-β-γ濾波器對目標的跟蹤濾波效果如圖 2所示,預測誤差幅度如圖3所示:

圖2 初始α-β-γ濾波器濾波效果
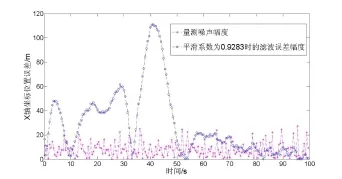
圖3 初始α-β-γ濾波器濾波誤差幅度
從圖2和圖3可以看出,在目標出現較強機動的時候,初始α-β-γ濾波器的預測誤差急劇增大。在目標機動最強的加速段1和加速段2上目標預測誤差達到最大,進入目標勻速直線運動段后,預測誤差逐漸減小,但減小速度較慢,到[70s,100s]段時預測誤差已經減小到低于量測噪聲了,才達到較好的跟蹤效果。

圖4 自適應多模型α-β-γ濾波的濾波效果

圖5 自適應多模型α-β-γ濾波的濾波誤差幅度
從圖4和圖5可以看出,自適應多模型α-β-γ濾波算法有效地改善了對較強機動目標的跟蹤性能。在目標非機動和機動時,算法的濾波誤差幅度總體上小于量測噪聲幅度,得到了較好的跟蹤效果。
3 結論
針對單模型α-β、α-β-γ和標準卡爾曼濾波算法對于機動目標跟蹤性能下降的問題,本文基于多模型混合估計思想,提出了一種自適應多模型α-β-γ濾波算法。仿真結果表明,該算法可以較好地適應目標的機動,對目標的跟蹤性能較好。但該算法需要多模型并行運算,計算量較大。同時,模型集合如何選取最優以及模型概率如何計算最優,這些問題仍需要進一步研究解決。
[1] 黃鶴,張會生,許家棟,等.一種改進的α-β-γ濾波跟蹤算法[J].西北工業大學學報,2008,26(2):146-151.
[2] 高增敏,王首勇,鄭作虎,等.一種適用于機動目標跟蹤的改進卡爾曼濾波算法[J].空軍雷達學院學報,2011,5(25): 339-342.
[3] 何友,修建娟,張晶煒,等.雷達數據處理及應用(第二版) [M].北京:電子工業出版社,2009:160-161.
[4] Tenne D. Optimal Design of α-β-γ Filters. Proceedings of the American Control Conference[J].Chicago IL USA, 2000,(6):4348-4352.
[5] Y.Bar-Shalom,T.E.Fortmann.Tracking and Data Association[M]. Academic Press,1988.
[6] 李從文.基于輸入估計的滑窗式目標機動檢測算法研究[D].南京:南京理工大學,2010.
Multiple model algorithm based on α-β-γ filter for tracking maneuvering targets
In consideration of the performance degradation of traditional α-β-γ filter in tracking maneuvering targets, a multiple model algorithm based on α-β-γ Filter is presented. It is based on the method of multiple model estimation, using the residual to update probabilities of models and adjust the filter adaptively. The simulation results show that compared with the traditionalα-β-γfilter, this algorithm has better tracking performance for maneuvering targets.
α-β-γ filter; tracking maneuvering targets; multiple model estimation
TP11
A
1008-1151(2015)11-0012-03
2015-10-11
張瑞(1990-),男,陜西榆林人,西安電子工程研究所碩士研究生,研究方向為雷達總體技術;謝敏(1991-),女,陜西西安人,西安電子工程研究所碩士研究生,研究方向為固態發射機技術;雷瑛(1982-),女,陜西西安人,西安電子工程研究所工程師,研究方向為雷達信息處理、實時控制技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36