基于滑油監(jiān)控信息的發(fā)動(dòng)機(jī)磨損狀態(tài)融合評(píng)估
2015-11-19 08:42:20張鵬飛李本威
航空發(fā)動(dòng)機(jī) 2015年4期
張鵬飛,李本威,韋 祥,胡 洋
(1.91046部隊(duì),山東萊陽(yáng)265200;2,3.海軍航空工程學(xué)院飛行器工程系2,研究生管理大隊(duì)3,山東煙臺(tái)264001;4.91934部隊(duì),浙江義烏322000)
0 引言
磨損是航空發(fā)動(dòng)機(jī)早期故障的主要原因,嚴(yán)重影響發(fā)動(dòng)機(jī)的可靠性。對(duì)磨損故障最為成熟的監(jiān)控手段是滑油分析。單一滑油分析方法的準(zhǔn)確率有限,容易漏報(bào)某類(lèi)故障,從而造成重大安全事故。各種滑油分析方法各有所長(zhǎng),因此,需基于多種滑油樣分析信息進(jìn)行融合診斷評(píng)估。目前已有大量學(xué)者對(duì)發(fā)動(dòng)機(jī)磨損故障的融合診斷方法進(jìn)行了研究。文獻(xiàn)[1-4]以光譜、鐵譜、理化性能等檢測(cè)結(jié)果為征兆信息,運(yùn)用融合方法對(duì)發(fā)動(dòng)機(jī)磨損故障進(jìn)行診斷,提高了診斷的精確度,但在具體操作時(shí)有較大局限性;文獻(xiàn)[5-8]僅利用光譜分析結(jié)果,基于D-S證據(jù)理論將磨損量和磨損率進(jìn)行融合,對(duì)發(fā)動(dòng)機(jī)磨損狀態(tài)進(jìn)行評(píng)估,忽視了光譜分析不能完全反映滑油中所有磨粒信息的事實(shí);文獻(xiàn)[9-10]針對(duì)光譜分析僅能對(duì)尺寸<10μm的磨粒進(jìn)行精確分析的弊端,引入了與之相補(bǔ)的自動(dòng)磨粒檢測(cè)技術(shù),并利用檢測(cè)得到的各元素磨粒數(shù)和磨粒個(gè)數(shù)對(duì)發(fā)動(dòng)機(jī)磨損狀態(tài)進(jìn)行融合診斷評(píng)估,效果較好,但忽略了磨損增長(zhǎng)率對(duì)評(píng)估發(fā)動(dòng)機(jī)狀態(tài)的重要性。
本文基于光譜分析和自動(dòng)磨粒檢測(cè)2種滑油樣分析的結(jié)果,針對(duì)現(xiàn)有評(píng)估算法的局限性,將模糊推理和證據(jù)理論結(jié)合,提出了1種新的信息融合評(píng)估算法,充分利用了滑油分析的檢測(cè)信息,并使各算法優(yōu)勢(shì)互補(bǔ),可得到較為理想的評(píng)估結(jié)果。
1 航空發(fā)動(dòng)機(jī)磨損狀態(tài)融合評(píng)估新方法
1.1 磨損狀態(tài)評(píng)估指標(biāo)確定
某型發(fā)動(dòng)機(jī)潤(rùn)滑系統(tǒng)的磨損部位主要有主軸軸承、離心通風(fēng)器和回油泵等,其中主軸軸承失效的故障率最高且危險(xiǎn)性最大。主軸軸承的失效模式主要有3種:磨損、疲勞剝落、斷裂。滑油光譜分析(spectrometricoilanalysis)可對(duì)尺寸小于10μm的磨粒進(jìn)行精確分析,對(duì)軸承漸進(jìn)型磨損或由發(fā)動(dòng)機(jī)裝配質(zhì)量引起的早期磨損的預(yù)報(bào)效果較好,但對(duì)后2種故障模式的預(yù)報(bào)效果較差。在該型發(fā)動(dòng)機(jī)實(shí)際故障統(tǒng)計(jì)中發(fā)現(xiàn):當(dāng)滑油中有大量大磨粒時(shí),軸承疲勞為最主要的失效模式[9]。因此,需引入大磨粒檢測(cè)技術(shù),Laser NetFines-C(LNF)自動(dòng)磨粒檢測(cè)儀可識(shí)別大于20μm的全部顆粒,按金屬磨損類(lèi)型進(jìn)行區(qū)分并加以計(jì)數(shù)。針對(duì)實(shí)際情形中軸承故障模式的復(fù)雜性,可選用滑油光譜分析和與之相補(bǔ)的大磨粒分析技術(shù),對(duì)發(fā)動(dòng)機(jī)主軸軸承磨損狀態(tài)進(jìn)行重點(diǎn)監(jiān)控并融合評(píng)估。
針對(duì)軸承磨損狀態(tài)評(píng)估,依據(jù)其主要材料成分,確定光譜分析中Fe、Cu為重要元素,監(jiān)控其磨損量和磨損率。依據(jù)失效模式,確定自動(dòng)磨粒檢測(cè)中監(jiān)控對(duì)象為切削磨粒、疲勞磨粒和嚴(yán)重滑動(dòng)磨粒,監(jiān)控各磨粒數(shù)和增長(zhǎng)率。發(fā)動(dòng)機(jī)其余重要部件(離心通風(fēng)器等)磨損狀態(tài)評(píng)估也可依此類(lèi)推。
1.2 磨損狀態(tài)融合評(píng)估模型
航空發(fā)動(dòng)機(jī)磨損狀態(tài)的融合評(píng)估流程如圖1所示。首先對(duì)滑油樣進(jìn)行光譜分析和自動(dòng)磨粒檢測(cè)分析,可基本獲取滑油樣中所有重要磨粒的信息;針對(duì)各監(jiān)控對(duì)象,將磨損量和磨損率進(jìn)行模糊推理,得到發(fā)動(dòng)機(jī)磨損狀態(tài)評(píng)估結(jié)果;在光譜分析和自動(dòng)磨粒檢測(cè)中,分別進(jìn)行Max運(yùn)算,得出各自最后的決策結(jié)果;針對(duì)2種滑油分析方法的評(píng)估結(jié)果,實(shí)施決策層的信息融合;基于粗糙集理論和專(zhuān)家經(jīng)驗(yàn),得到2種滑油分析方法的可靠程度,確保了2證據(jù)基本置信度分配的準(zhǔn)確性;最后,運(yùn)用D-S證據(jù)理論進(jìn)行融合診斷。以軸承磨損狀態(tài)評(píng)估為例,介紹其關(guān)鍵環(huán)節(jié)。
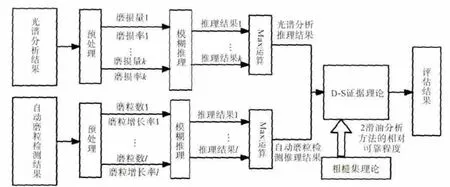
圖1 發(fā)動(dòng)機(jī)磨損狀態(tài)融合評(píng)估流程
1.3 模糊推理機(jī)的構(gòu)建
針對(duì)每個(gè)監(jiān)控對(duì)象,都需構(gòu)建1個(gè)模糊推理機(jī)來(lái)對(duì)其故障征兆進(jìn)行模糊推理。根據(jù)軸承磨損狀態(tài)評(píng)估確定的監(jiān)控對(duì)象,則應(yīng)構(gòu)建5個(gè)模糊推理機(jī)。以自動(dòng)磨粒檢測(cè)的切削磨粒為例,詳細(xì)介紹構(gòu)建模糊推理機(jī)的過(guò)程。
故障征兆的模糊推理包含4個(gè)步驟:模糊化、模糊規(guī)則建立、關(guān)系生成方法和推理合成算法的選取、反模糊化[11]。
1.3.1 模糊化
針對(duì)自動(dòng)磨粒檢測(cè)的切削磨粒,其故障征兆集為S={s1,s2},其中,s1為切削磨粒數(shù),s2為切削磨粒增長(zhǎng)率。發(fā)動(dòng)機(jī)軸承的磨損狀態(tài)集為Ω={ω1,ω2,ω3},ω1、ω2、ω3分別表示磨損狀態(tài)為正常、警告、異常。G={g(ω1),g(ω2),g(ω3)},向量G 表示3種磨損狀態(tài)發(fā)生的可能性。
對(duì)故障征兆進(jìn)行模糊化處理。某型發(fā)動(dòng)機(jī)在實(shí)際使用中,依據(jù)統(tǒng)計(jì)分析和實(shí)際使用經(jīng)驗(yàn),切削磨粒的警告值為10個(gè)/mL、異常值為30個(gè)/mL、增長(zhǎng)率異常值為6個(gè)/(mL·10h)。依據(jù)界限值,將si分為“小”、“中”、“大”3個(gè)類(lèi)別,并劃分其各自的模糊集合,建立相應(yīng)的隸屬度函數(shù)μj(s1)、μj(s2)(j=1,2,3),如圖2所示。本文選用梯形函數(shù)的隸屬度形式。
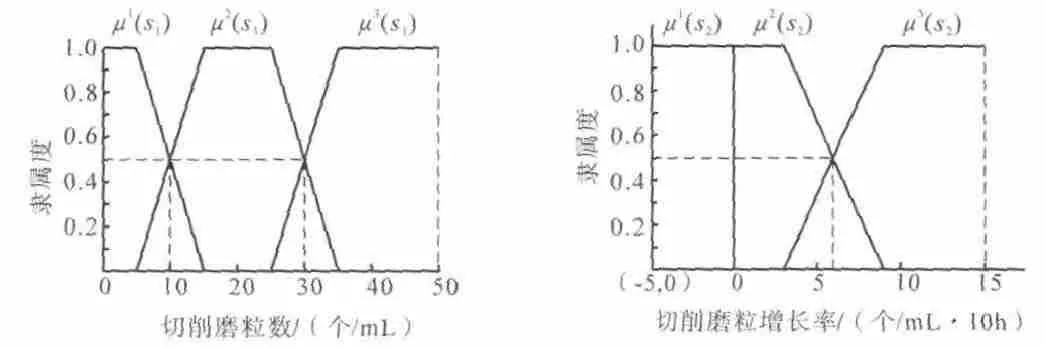
圖2 切削磨粒征兆信息隸屬度函數(shù)
依據(jù)經(jīng)驗(yàn)對(duì)輸出變量g(ωj)(j=1,2,3)進(jìn)行模糊化處理,將其分為“較小”、“一般”、“較大”3個(gè)類(lèi)別,并劃分其各自的模糊集合,建立相應(yīng)的隸屬度函數(shù)μ1(g(ωj))、μ2(g(ωj))、μ3(g(ωj))(j=1,2,3),如圖3所示。本文中選用梯形和三角函數(shù)的隸屬度形式。
1.3.2 建立模糊規(guī)則
模糊規(guī)則的建立一般需基于專(zhuān)家知識(shí)或大量的試驗(yàn)數(shù)據(jù),可表示為“if…then…”。基于發(fā)動(dòng)機(jī)領(lǐng)域知識(shí),針對(duì)s1和s22個(gè)故障征兆,建立磨損狀態(tài)評(píng)估規(guī)則庫(kù),評(píng)估規(guī)則見(jiàn)表1。
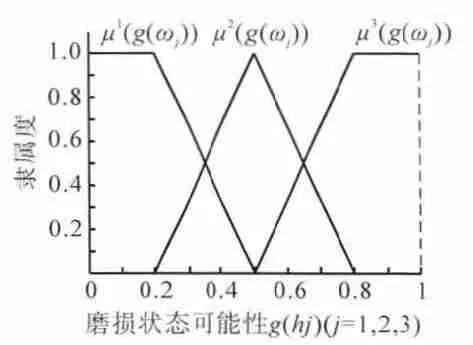
圖3 輸出變量隸屬度函數(shù)
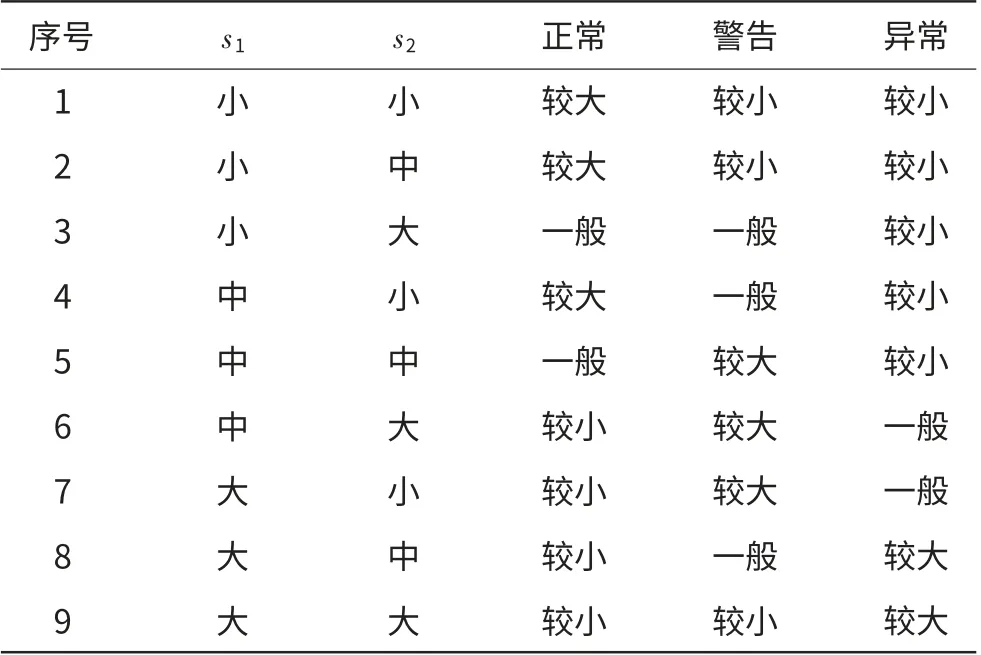
表1 發(fā)動(dòng)機(jī)磨損狀態(tài)評(píng)估規(guī)則
模糊推理需要選取適當(dāng)?shù)年P(guān)系生成方法和推理合成算法,本文采用Mamdani方法。反模糊化是模糊化的逆過(guò)程,將推理輸出的模糊值轉(zhuǎn)變?yōu)榇_定值的過(guò)程,此處采用重心法。各算法的具體計(jì)算過(guò)程詳見(jiàn)文獻(xiàn)[12-14]。
1.4 Max運(yùn)算
經(jīng)模糊推理,光譜分析各監(jiān)控對(duì)象所得到的發(fā)動(dòng)機(jī)軸承磨損狀態(tài)可能向量可表示為自動(dòng)磨粒檢測(cè)各監(jiān)控對(duì)象所得到的發(fā)動(dòng)機(jī)軸承磨損狀態(tài)可能向量可表示為進(jìn)行Max運(yùn)算,在2種滑油分析方法中,分別選取推理結(jié)果中異常磨損可能性最大的監(jiān)控對(duì)象,將該監(jiān)控對(duì)象的推理結(jié)果作為各自滑油分析方法最終的推理結(jié)果。即若則光譜分析融合結(jié)果為


1.5 推理結(jié)果的融合決策
運(yùn)用D-S證據(jù)理論進(jìn)行融合決策時(shí),一般包括4個(gè)重要步驟:識(shí)別框架的構(gòu)建、基本置信度分配、證據(jù)合成和證據(jù)決策。針對(duì)滑油監(jiān)控的融合診斷,具體設(shè)計(jì)如下。
1.5.1 識(shí)別框架的構(gòu)建
在證據(jù)理論中,一些完備的獨(dú)立元素組成的集合稱(chēng)為識(shí)別框架。在發(fā)動(dòng)機(jī)軸承的磨損狀態(tài)集Ω={ω1,ω2,ω3}中,各元素兩兩互斥、并窮盡了所有狀態(tài),可將其視為狀態(tài)評(píng)估的識(shí)別框架。
1.5.2 基本置信度分配
(1)相對(duì)重要度的求解
本文依據(jù)條件屬性的屬性重要度[15]來(lái)求解2種滑油分析方法的相對(duì)重要度。設(shè)一信息表達(dá)系統(tǒng)S=

則條件屬性C 的信息熵H(C)可定義為

式中:|U|為集合U 中的元素個(gè)數(shù)。
依據(jù)Shannon熵的概念,當(dāng)條件屬性C 已知時(shí),決策屬性D 的條件熵H(D/C)可定義為

H(D/C)可用來(lái)表示決策屬性D 對(duì)條件屬性C 的依賴(lài)度。
針對(duì)任一條件屬性at∈C,則刪除屬性at可得H(D/C-{at}),屬性at對(duì)決策系統(tǒng)影響的重要度可表示為

則對(duì)?ax、ay∈C,可定義其相對(duì)重要度

(2)歸一化處理
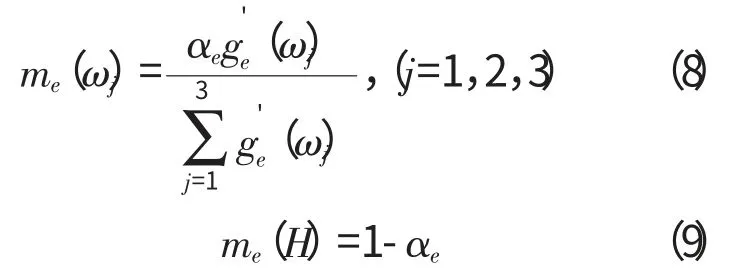
分別設(shè)2個(gè)證據(jù)體的基本置信度向量為me=(me(ω1),me(ω2),me(ω3),me(H),(e=1,2),則歸一化公式為
1.5.3 證據(jù)合成
基于Dempster規(guī)則,對(duì)基本置信度向量m1、m2進(jìn)行證據(jù)合成。合成后結(jié)果表示為m=(m(ω1),m(ω2),m(ω3),m(H)),則合成運(yùn)算為

1.5.4 證據(jù)決策
根據(jù)合成結(jié)果m,依據(jù)最大置信度的方法作出決策。設(shè)ω*?H,若 有m(ω*)=max(m(ω1),m(ω2),m(ω3),m(H)),則ω*即為評(píng)估的發(fā)動(dòng)機(jī)磨損狀態(tài)。
2 實(shí)例應(yīng)用
某型發(fā)動(dòng)機(jī)滑油分析數(shù)據(jù)見(jiàn)表2。
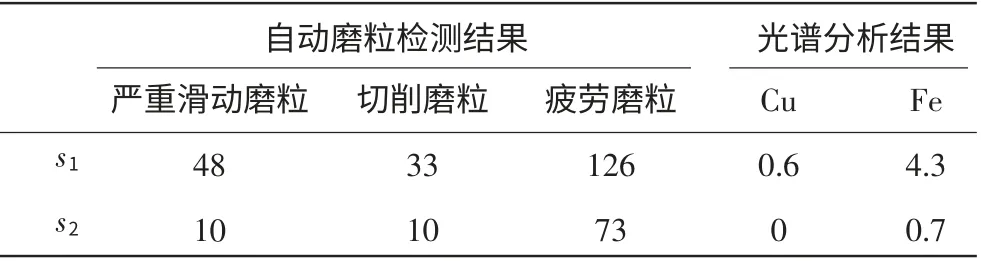
表2 某型發(fā)動(dòng)機(jī)滑油檢測(cè)結(jié)果
依據(jù)本文所建模糊推理機(jī),經(jīng)模糊推理、Max運(yùn)算后,所得結(jié)果見(jiàn)表3。從表中可知,分別由單一滑油分析方法的檢測(cè)結(jié)果得到的評(píng)估結(jié)果相互間沖突較大,嚴(yán)重影響了狀態(tài)評(píng)估的最終決策。為此,需按模型進(jìn)行決策層的信息融合。
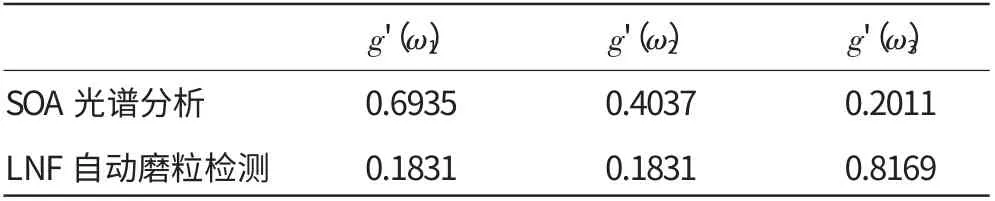
表3 磨損狀態(tài)可能性的模糊推理結(jié)果
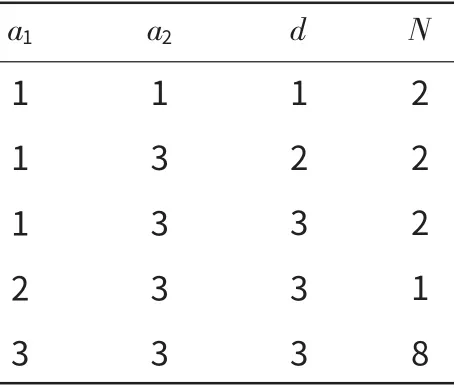
表4 某型發(fā)動(dòng)機(jī)磨損狀態(tài)評(píng)估決策
為求取2種滑油分析方法的可靠程度,選取15組發(fā)動(dòng)機(jī)滑油分析原始數(shù)據(jù)[9],分別依據(jù)單一滑油分析數(shù)據(jù)進(jìn)行模糊推理,得到發(fā)動(dòng)機(jī)的磨損狀態(tài),屬性值“1”、“2”、“3”分別表示單一滑油分析手段評(píng)估結(jié)果為“正常狀態(tài)”、“警告狀態(tài)”、“異常狀態(tài)”。條件屬性a1、a2分別表示光譜分析、自動(dòng)磨粒檢測(cè)的評(píng)估結(jié)果,決策屬性d 表示發(fā)動(dòng)機(jī)的實(shí)際磨損狀態(tài)。其評(píng)估決策見(jiàn)表4。其中N 表示具有相同屬性值的對(duì)象數(shù)量。
表4中的條件屬性集C={a1,a2},則各等價(jià)關(guān)系在論域U 下的等價(jià)類(lèi)為
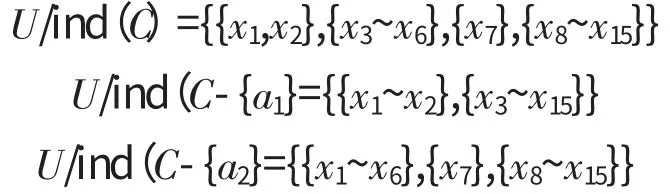
依據(jù)式(4)、(5)可得
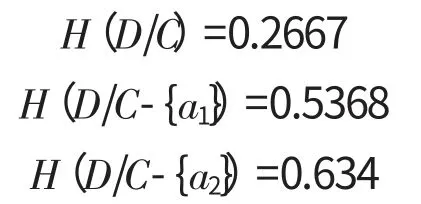
則屬性a1對(duì)決策系統(tǒng)的重要度

屬性a2對(duì)決策系統(tǒng)的重要度

可得2屬性的相對(duì)重要度

依據(jù)專(zhuān)家經(jīng)驗(yàn),給出光譜分析的可靠程度α1=0.7,則α2=α1Q21=0.7×1.36=0.952。
對(duì)表3中的推理結(jié)果依據(jù)式(8)、(9)進(jìn)行歸一化處理,得各磨損狀態(tài)下的基本置信度,見(jiàn)表5。
基于Dempster規(guī)則,對(duì)表5進(jìn)行數(shù)據(jù)融合,得m=(0.2382,0.1762,0.5563,0.0293),分析可知該發(fā)動(dòng)機(jī)的磨損狀態(tài)應(yīng)為ω3(異常磨損狀態(tài))。對(duì)該發(fā)動(dòng)機(jī)分解發(fā)現(xiàn),其主軸軸承發(fā)生嚴(yán)重疲勞磨損,驗(yàn)證了本文方法的有效性。

表5 各磨損狀態(tài)下的基本置信度
3 結(jié)束語(yǔ)
本文提出1種新的發(fā)動(dòng)機(jī)磨損狀態(tài)融合評(píng)估方法,有效融合了光譜分析和自動(dòng)磨粒檢測(cè)的結(jié)果,提高了評(píng)估結(jié)果的準(zhǔn)確性。實(shí)例驗(yàn)證表明,該方法能夠準(zhǔn)確地評(píng)估出發(fā)動(dòng)機(jī)的實(shí)際磨損狀態(tài),可為相關(guān)人員進(jìn)行維修維護(hù)提供決策支持。
該方法評(píng)估結(jié)果的準(zhǔn)確性對(duì)各征兆信息的邊界值有較強(qiáng)的依賴(lài)性,需不斷搜集該型發(fā)動(dòng)機(jī)在不同磨損狀態(tài)下的滑油分析數(shù)據(jù),對(duì)邊界值進(jìn)行更加準(zhǔn)確的定義,進(jìn)一步提高評(píng)估結(jié)果的準(zhǔn)確性。
[1]陳果.航空發(fā)動(dòng)機(jī)磨損故障的智能融合診斷[J].中國(guó)機(jī)械工程,2005,16(4):299-302,306.CHEN Guo.Intelligent fusion diagnosis of aeroengine wear faults[J].Chinese Journal of Mechanical Engineering,2005,16(4):299-302,306.(in Chinese)
[2]文振華,陳果.基于D-S證據(jù)理論的航空發(fā)動(dòng)機(jī)磨損故障智能融合診斷方法[J].機(jī)械科學(xué)與技術(shù),2005,24(9):1018-1021.WEN Zhenhua,CHEN Guo.An intelligent fusion technique for diagnosis of engine wear fault based on D-S evidence theory[J].Mechanical Science and Technology for Aerospace Engineering,2005,24(9):1018-1021.(in Chinese)
[3]陳果,左洪福,楊新.基于神經(jīng)網(wǎng)絡(luò)的多種油樣分析技術(shù)融合診斷[J].摩擦學(xué)學(xué)報(bào),2003,23(5):431-434.CHEN Guo,ZUO Hongfu,YANG Xin.Neural network-based fusion diagnosis using various oil analysis techniques[J].Tribology,2003,23(5):431-434.(in Chinese)
[4]陳果.基于神經(jīng)網(wǎng)絡(luò)和D-S證據(jù)理論的發(fā)動(dòng)機(jī)磨損故障融合診斷[J].航空動(dòng)力學(xué)報(bào),2005,20(2):303-308.CHEN Guo.Fusion diagnosis of engine wearing fault based on neural networks and D-S evidence theory[J].Journal of Aerospace Power,2005,20(2):303-308.(in Chinese)
[5]瞿紅春,丁協(xié)賓.基于D-S證據(jù)理論的航空發(fā)動(dòng)機(jī)故障診斷[J].中國(guó)民航大學(xué)學(xué)報(bào),2011,29(4):4-7.QU Hongchun,DING Xiebin.Aeroengine fault diagnosis based on D-S evidential theory[J].Journal of Civil Aviation University of China,2011,29(4):4-7.(in Chinese)
[6]赫英,彭鴻博.D-S證據(jù)理論及其在滑油故障診斷中的應(yīng)用[J].中國(guó)民航學(xué)院學(xué)報(bào),2003,21(3):41-44.HE Ying,Peng Hongbo.D-S theory and application in fault diagnosis of aircraft engine oil system[J].Journal of Civil Aviation University of China,2003,21(3):41-44.(in Chinese)
[7]胡金海,謝壽生,駱廣琦,等.基于Dempster-Shafer證據(jù)理論的航空發(fā)動(dòng)機(jī)磨損狀況融合診斷 [J].機(jī)械科學(xué)與技術(shù),2008,27(3):343-346.HU Jinhai,XIE Shousheng,LUO Guangqi,et al.Fusion diagnosis of aeroengine wearing condition based on Dempster-Shafer proof theory[J].Mechanical Science and Technology for Aerospace Engineering,2008,27(3):343-346.(in Chinese)
[8]崔曉飛,張改虎,蔣科藝,等.基于光譜D-S證據(jù)融合的航空發(fā)動(dòng)機(jī)故障診斷技術(shù)[J].航空發(fā)動(dòng)機(jī),2009,35(1):37-39,56.CUI Xiaofei,ZHANG Gaihu,JIANG Keyi,et al.Fault diagnosis technology for aeroengine based on spectrum D-S evidence fusion[J].Aeroengine,2009,35(1):37-39,56.(in Chinese)
[9]陳立波,宋蘭琪,陳果.航空發(fā)動(dòng)機(jī)滑油綜合監(jiān)控中的磨損故障融合診斷研究[J].航空動(dòng)力學(xué)報(bào),2009,24(1):169-175.CHEN Libo,SONG Lanqi,CHEN Guo.Study on diagnosis techniques of wear faults in synthesized monitoring of aeroengine[J].Journal of Aerospace Power,2009,24(1):169-175.(in Chinese)
[10]陳果,陳立波,宋蘭琪.一種磨損故障融合診斷新方法及其應(yīng)用[J].機(jī)械科學(xué)與技術(shù),2009,28(9):1157-1161.CHEN Guo,CHEN Libo,SONG Lanqi.A new approach to fusion diagnosis of wear faults and its application[J].Mechanical Science and Technology for Aerospace Engineering,2009,28(9):1157-1161.(in Chinese)
[11]張國(guó)良,曾靜.模糊控制及其MATLAB應(yīng)用[M].西安:西安交通大學(xué)出版社,2002:25-28.ZHANG Guoliang,ZENG Jing.Fuzzy control and its Matlab application[M].Xi’an:Xi’an Jiaotong University Press,2002:25-28.(in Chinese)
[12]王古常,成堅(jiān),鮑傳美,等.模糊推理和證據(jù)理論融合的航空發(fā)動(dòng)機(jī)故障診斷[J].航空動(dòng)力學(xué)報(bào),2011,26(9):2101-2106.WANG Guchang,CHENG Jian,BAO Chuanmei,et al.Diagnosis method of aeroengine fault based on fuzzy inference and evidence theory[J].Journal of Aerospace Power,2011,26(9):2101-2106.(in Chinese)
[13]張德豐,楊文茵.Matlab工程應(yīng)用仿真[M].北京:清華大學(xué)出版社,2012:184-222.ZHANG Defeng,YANG Wenyin.Matlab application engineering and simulation[M].Beijing:Tsinghua University Press,2012:184-222.(in Chinese)
[14]趙振宇,徐用懋.模糊理論和神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)與應(yīng)用[M].北京:清華大學(xué)出版社,1995:14-22.ZHAO Zhenyu,XU Yongmao.Introduction to fuzzy theory,neural networks and their application[M].Beijing:Tsinghua University Press,1995:14-22.(in Chinese)
[15]李冬,宋巖,馬力,等.基于粗糙集和支持向量數(shù)據(jù)描述的發(fā)動(dòng)機(jī)視情維修研究[J].燃?xì)廨啓C(jī)技術(shù),2013,26(1):46-50,58.LI Dong,SONG Yan,MA Li,et al.Research of engine condition-based maintenance based on rough set and support vector data description[J].Gas Turbine Technology,2013,26(1):46-50,58.(in Chinese)
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01