基于ARM的智能探測機器人
2015-11-11 02:35:54王康欣李健祥鄭丹
新教育時代電子雜志(學生版) 2015年30期
關鍵詞:智能
王康欣 李健祥 鄭丹
(北方民族大學寧夏銀川750021)
基于ARM的智能探測機器人
王康欣李健祥鄭丹
(北方民族大學寧夏銀川750021)
本文實現了一款基于ARM(Cortex-M3)處理器的智能防火災尋路機器人及相關的硬件軟件為一體的設計方案,通過在小車上集成各種傳感器,利用ARM高性能,可兼容性的特點。
ARM智能機器人傳感器
引言
生活中經常會有意外事故發生,這些現場人們往往無法進入,或者在不了解內部的情況下進入會有危險,這些事故現場就成了最危險的救援現場,很多救援工作人員為此受傷甚至喪生,而且救援行動緩慢致使很多平民受害,鑒于救援的實時性和特殊性,我們研發了這款基于ARM的智能探測機器人。主要功能是:在事故救援現場參與救援,具體而言是由專業人員無線遙控控制,通過其上安裝的攝像頭拍攝現場畫面傳回實時畫面供救災人員進行分析,通過各種傳感器能夠檢測事故現場的溫度,濕度,氣體質量以確認是否符合救援人員生存環境,以避免由于不清楚狀況,貿然進入而造成的不必要傷亡,以此幫助救災人員進行救災,它與讓人來完成這件任務而言的好處在于能減少人員傷亡,成本低,行動不容易受限,能提供更精確的實時的數據,更精確化等等。[1]
本文實現了一款基于ARM(Cortex-M3)處理器的智能防火災尋路機器人及相關的硬件軟件為一體的設計方案。通過在小車上集成各種傳感器,利用ARM高性能,可兼容性的特點。可以實現在特定的黑白軌道上自動循跡,并且集成了各種傳感器,可實現實時將環境中的各種數據,如溫度,濕度,視頻等信息通過藍牙模塊及無線wifi模塊傳輸回電腦進行分析處理。[2]
一、總體設計
首先我們自己組裝一輛符合要求的小車,由于事故現場的特殊性,我們對材質,大小都有很高的要求,然后根據我們需要實現的功能去拓展外圍設備,包括電子攝像頭,溫度檢測器,濕度檢測器,氣體質量檢測器等等,外加遙控裝置,在模擬事故現場條件下實施各種作業,不斷調試以完成預期設計。做成一款能夠拍攝事故現場畫面,能夠檢測事故現場各種參數的智能小車,通過不斷地模擬,能夠參與到實際的事故現場幫助完成救援任務的智能機器人。[3]
小車整個系統由傳感器模塊,無線通訊模塊,電源/電機模塊,紅外避障模塊,攝像頭模塊/Wifi模塊,USB Hub模塊組成。[4]
二、整體設計
1.1傳感器模塊設計
紅外傳感器是小車循跡過程中的一個重要部分,通過與光敏電阻的配合使用。由于不同顏色對于光的反射程度不同,所以可以通過光敏電阻來進行循跡。由于是光線傳感器,再安裝時注意高度變化,使其保持在合適的位置。紅外傳感器的測距是80CM,也可通過調節繼電器來改變測距。
此外,小車前部還安裝了兩個紅外避障模塊,使機器人小車在循跡是可以躲避障礙物,增強在現實中的可用性。
1.2無線通訊模塊
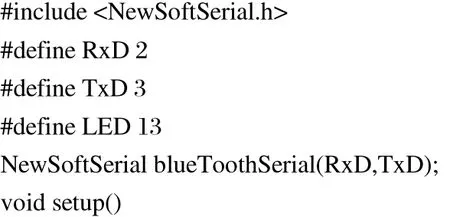
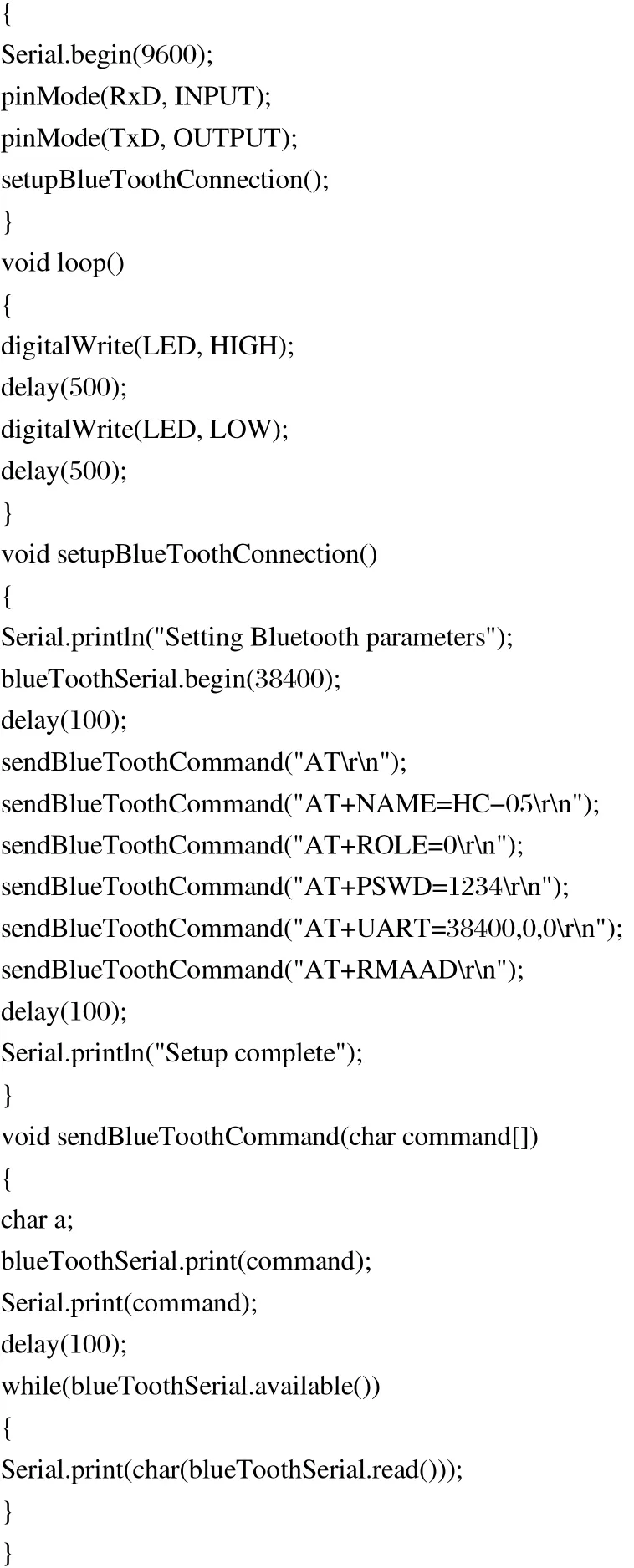
無線通訊模塊主要通過藍牙模塊以及無線wifi模塊來實現。使用的藍牙模塊是BlueTooth,這一模塊的藍牙為HC-05。
BlueTooth藍牙模塊上的5V,3.3V任意接到一個相應的電壓就可以接高電平,然后通過USB模塊連接到電腦。這樣就可以實現小車和上位機之間的通信。
藍牙模塊燒錄部分源碼如下:
無線wifi模塊通過在ARM上編寫的相關程序與上位機程序連接,同樣可以將溫度,濕度等信息傳回到上位機上的軟件。最后進行分析,從而得到相應監測地點的數據。
1.3攝像頭模塊
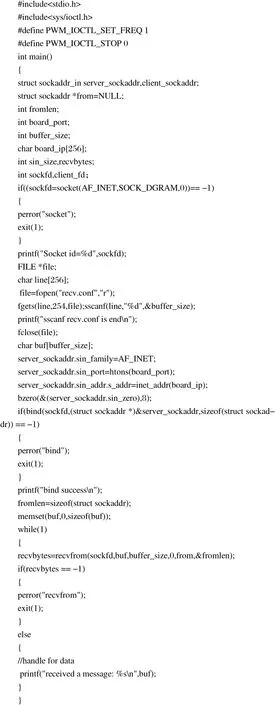
通過攝像頭模塊來采集視頻信息,通過藍牙模塊實時傳輸回視頻到上位機。操作者可實時看到小車傳回的信息,從而了解火災發生地點內部的結構以及人員傷亡狀況。圖像采集主要基于MC9812DG128單片機實現,總線速度20MHz,8KBRAM,256KBflash。
視頻監控系統控制部分源碼
三、軟件設計與實現
智能機器人的整體軟件系統都是通過C語言及少量的內嵌匯編語言來實現。編譯過程主要通過上位機以及ARM GCC編譯器來進行,也可通過makefile實現整個項目相關文件的編譯。程序的燒寫過程也極為簡單,可通過專用串口線進行燒寫,將程序下載到開發板中,啟動集成的各個模塊,就可進行開發和調試。
通過傳感器發回的信號和返回值,控制系統可通過輸出不同的占空比的pwm來控制轉速,從而實現各種復雜動作的行為。
四、結語
本文論及的基于ARM的智能機器人設計充分利用了Cortex-M3的優點,通過改善和利用處理速度,使機器人的性能變得更加穩定,同時利用紅外避障模塊以及循跡模塊,可以實現自動循跡以及避障的功能,自動識別路徑。通過在小車上集成各種濕度,溫度傳感器,攝像頭模塊,使得機器人在實際火災救援過程中具有實用性,功能也變得更加豐富和穩定。
[1]弓雷等.ARM嵌入式Linux系統開發詳解清華大學出版社
[2]弓雷等.Linux環境C語言程序設計清華大學出版社
[3]杜春雷等.ARM體系結構與編程清華大學出版社
[4]孫增圻.系統分析與控制清華大學出版社
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
- 新教育時代電子雜志(學生版)的其它文章
- 關于點、直線的對稱問題
- 例談小學數學簡便計算教學
- 基于相關空間法的自主導航算法研究
- 基于蒙特卡洛方法對油氣懸架參數的分析
- ——教研員下水課課例研究報告">"何必這樣教條?"以北師版五上"雞兔同籠"教學為例
——教研員下水課課例研究報告 - 基于虛擬網盤的英語學習系統