考慮開槽和高次諧波的永磁同步電機解析模型*
2015-11-03 04:00:18馬琮淦左曙光
振動、測試與診斷 2015年2期
馬琮淦, 左曙光, 孟 姝, 孫 慶
(同濟大學新能源汽車工程中心 上海,201804)
?
考慮開槽和高次諧波的永磁同步電機解析模型*
馬琮淦, 左曙光, 孟姝, 孫慶
(同濟大學新能源汽車工程中心 上海,201804)
永磁同步電機6i階(i∈N)轉矩波動是電機總成與電動車車身階次振動的主要振源。筆者提出了一種考慮定子開槽與高次諧波的永磁同步電機解析計算模型。建模過程基于瞬態氣隙磁場分布的計算。當不考慮電流諧波時,電磁轉矩具有6i階(i∈N)轉矩波動特性。最后,通過有限元計算驗證了該解析計算結果。文中解析模型揭示了電動車用永磁同步電機轉矩波動非線性的形成機理。
開槽;高次諧波;永磁同步電機;電動車;解析模型
引 言
永磁同步電機(permanent magnet synchronous motors,簡稱PMSM)具有高功率密度和寬調速范圍,被廣泛應用于電動汽車的直接驅動。然而,其6i階(i∈N)轉矩波動造成了電機總成和電動汽車車身的階次振動[1-2]。因此,研究永磁同步電機轉矩波動是十分必要的。
當假設電樞繞組中通入正弦電流時,主要有兩種因素引起轉矩波動[3]:定子開槽和高次諧波。因此,在轉矩波動的計算中應當考慮定子開槽引起的磁導變化和由永磁體產生的高次諧波。對于轉矩波動的分析,Ree等[4]假設氣隙磁場已知,提出了一種研究表貼式和內埋式永磁同步電機齒槽轉矩和電磁轉矩波動的方法;Takeo Ishikawa等[5-6]用有限元法分析了齒槽轉矩和電磁轉矩的總和;文獻[7]提出了一種考慮電磁飽和參數來減小轉矩波動的方法;文獻[8]采用了一種兩步設計過程,通過二維有限元分析減小轉矩波動;為避免冗長的有限元分析計算,文獻[9]提出了一種永磁電機解析建模方法;文獻[10]分析了兩種減小永磁同步電機伺服驅動轉矩波動的方法。然而,絕大多數永磁同步電機控制系統都是基于不考慮開槽、高次諧波的永磁同步電機線性模型,不能反映電動車用永磁同步電機轉矩波動非線性特性。
為此,筆者提出了一種考慮定子開槽和高次諧波的永磁同步電機非線性解析模型。所獲得的轉矩波形與二維有限元分析計算的波形吻合,證明了本解析法的準確性。
1 考慮開槽的永磁體磁場分布
本模型做了如下假設:a.忽略電磁飽和、磁滯和渦流的影響,電機為線性的磁性條件;b.電機電流為對稱的三相正弦規律變化;c.定子開槽,槽是矩形或梯形。
定子開槽會導致磁路中磁導的變化,磁導會影響永磁體磁場的分布。開槽磁導依賴于轉子位置,磁場波形也是隨著轉子位置變化的。為了獲得氣隙內永磁體磁場分布,筆者采用了與文獻[11]中相似的方法。據文獻[11]作者的觀點,氣隙內永磁體徑向磁場分布可通過忽略定子開槽時永磁體磁場與氣隙開槽時相對磁導的乘積求得:

其中:BPM-less(θ1)為不開槽定子的磁場分布函數;α為轉子表面的角度;θ為轉子位移角;θ1為相對于轉子的角度;λ(α)為開槽氣隙區域的相對磁導函數。
不開槽定子瞬態磁場分布函數BPM-less(θ1)的計算見文獻[12]。在極坐標下通過求解氣隙磁場的泊松方程組,當時,氣隙內永磁體徑向磁場分布為
其中:Br為永磁體材料的剩磁,αp為極弧系數;p為極對數;Rm為永磁體圓弧半徑;Rr為轉子鐵心圓弧半徑;Rs為定子鐵心圓弧半徑;r=Rs+g/2;μr為永磁體相對磁導率;B2i-1為磁場第(2i-1)次諧波幅值。
開槽以兩種方式影響磁場。首先,減少了每極磁通,通常通過引入卡特系數kc計算此效應。其次,影響永磁體和氣隙內的磁場分布。筆者采用文獻[11]中開槽氣隙區域的二維模型相對磁導函數λ(α)來計算,可推得:

其中:y1為繞組節距;Qs為槽數。
Λμ的推導如下:

其中:b0為槽寬度。
卡特系數kc近似為
其中:g為氣隙長度,hm為永磁體厚度。
β(r)可通過保角變換獲得:
其中,各參數可通過如下方程確定:
式(8)是一個包含對數函數、指數函數和反三角函數的超越方程。筆者提出了通過牛頓下山法解此超越方程。首先假設:
其次,求得f(v)的導數:

根據牛頓下山法,式(8)的迭代解vk+1計算如下:

因此,式(1)中氣隙內永磁體徑向磁場分布的解析解如下:

2 定子的總磁鏈
根據電機學,定子總磁鏈由兩個部分組成。一部分是永磁體磁場產生的磁鏈;另一部分是電樞磁
場產生的磁鏈。可表示如下:

其中:Ψtotal,dq為定子總磁鏈矩陣;Ψmagnet,dq為由永磁體磁場產生的磁鏈矩陣;Ψarmature,dq為電樞磁場產生的磁鏈矩陣。
2.1永磁體磁場產生的磁鏈
為計算永磁體磁場在a相繞組中的磁鏈,用到磁鏈標準計算式:

其中:ψ為磁鏈;B為磁場分布;s為面積。
因此,永磁體磁場在a相繞組中產生的磁鏈為

其中:ψm,a(θ)為永磁體磁場在a相中產生的磁鏈;kd(2i-1)為繞組第(2i-1)次諧波分布系數;Nc為一相繞組串聯匝數;αj為繞組節距角;ls為定子長度。
假設[13]:
其中:q為每極每相槽數;m為相數;b為一個整數;c/d為一個不可約真分數。
因此,根據文獻[13],可得到適用于整數槽繞組和分數槽繞組的第(2i-1)次諧波分布系數kd(2i-1):


給出一相繞組串聯匝數Nc:其中:C1為繞組層數;Nk為每槽每層導體數;a1為并聯支路數。
將式(21,22)代入式(17),得式(17)的解析解為

其中:當時(2i-1)p-μQs≠0時,

當時(2i-1)p-μQs=0時,
因此,永磁體在a,b,c相中產生的磁鏈矩陣Ψm,abc為
故,dq坐標系下永磁體產生的磁鏈矩陣Ψmagnet,dq可通過Blondel-Park變換矩陣Tdq,abc求得:
2.2電樞磁場產生的磁鏈
電樞磁場產生的磁鏈矩陣Ψarmature,dq可由下式求得:

其中:Ld為d軸電感;Lq為q軸電感;id為d軸電流;iq為q軸電流。
假設相電流矩陣為

其中:ia,ib,ic分別為a,b,c相電流;imax為電流幅值;φ為內功率因數角。
因此,可得id和iq:

2.3定子總磁鏈
定子總磁鏈可由永磁體磁場產生的磁鏈與電樞磁場產生的磁鏈求和求得。式(15)的解析解為
其中:ψ1,ψ(6i-1)和ψ(6i+1)可由式(24,25)確定。
3 計算電壓
定子相電壓用矩陣的形式可表示為
其中:rs為相電阻,ψabc為a,b,c相繞組的總磁鏈矩陣。
注意到通過Blondel-Park變換矩陣Tdq,abc可以將相向量轉換為相應的dq坐標系下的向量。因此,式(30)兩邊同時乘以Tdq,abc,可轉換為
在一些繁復的推導后,式(33)可表達為
其中:ωr為轉子電角速度。式(34)的解析解變為
因此,可得感應電動勢Edq:
4 6i階轉矩波動計算與頻率分析
4.16i階轉矩波動計算
電磁功率Pem用矩陣形式可表達為

可得電磁轉矩:

其中:ωm為轉子機械角速度。
電磁轉矩的解析解為

機械運動方程表達如下其中:J為轉子總的轉動慣量;TL為負載轉矩;B為摩擦系數。
4.2波動頻率分析
根據式(39),當假設電樞繞組通入正弦電流時,電磁轉矩波動由兩部分6i階波動項組成均由永磁體磁場諧波產生。因此,轉矩波動頻率為
其中:nm為轉速;t為時間。
結果表明:電磁轉矩具有6i階波動特性。這從理論上解釋了永磁同步電機總成和電動汽車車身的階次振動。在設計電動汽車時,為避免共振,電機總成與車身的結構模態頻率應當遠離6i階轉矩波動頻率。因此,筆者為電動汽車的模態頻率規劃提供了理論基礎。
5 永磁同步電機動態模型
綜上所述,考慮定子開槽和高次諧波的永磁同步電機的動態模型可由以下3個方程表示:

其中:當(2i-1)p-μQs≠0時,
當(2i-1)p-μQs=0時,
6 解析計算結果與有限元分析結果的比較
筆者基于以上解析模型,編制計算機軟件[14],應用該軟件對解析模型和有限元模型進行了比較。計算實例選擇了用在電動車上的三相20極27槽雙層繞組永磁同步電機。該電機的主要參數見表1,電機模型見圖1。在計算前,運用本解析模型可以預測轉矩諧波頻率為

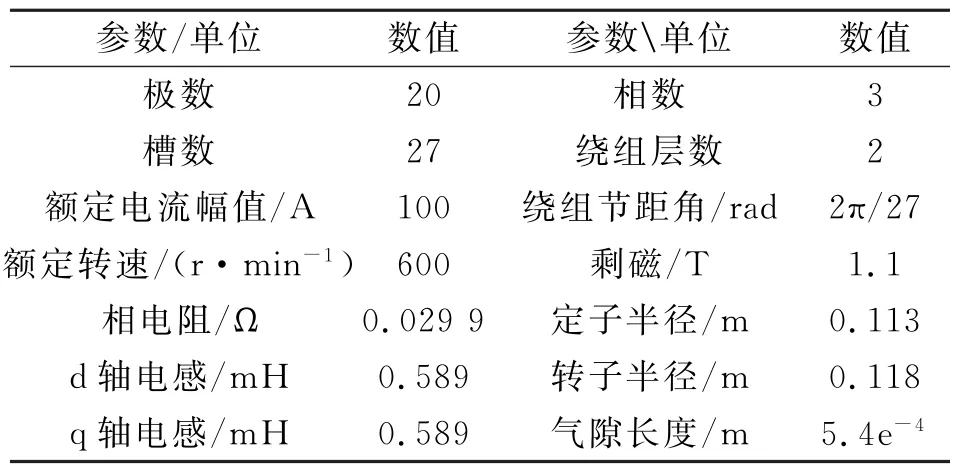
表1 計算實例電機的主要參數Tab.1 Main parameters of the prototype SPMSM
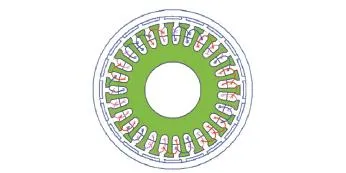
圖1 計算實例電機橫截面Fig.1 Cross-section of the SPMSM
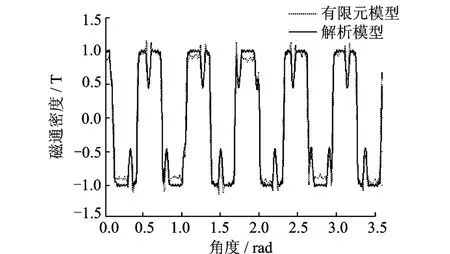
圖2 氣隙磁密對比Fig.2 Comparison with FEA for permanent magnet field in the air gap
解析模型和有限元法計算出的氣隙磁密如圖2所示,氣隙磁密諧波幅值如圖3所示。根據圖3,除了第17階的磁通諧波B17之外,解析模型結果能較好吻合有限元模型結果。根據式(24)和(25),上述差異會導致解析模型和有限元模型的17階磁鏈Ψ17存在差異。再根據式(39),其后果是:本解析模型與有限元模型中,第3階轉矩諧波Tem-3將存在一定的差異。
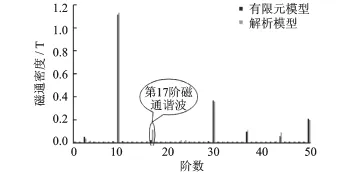
圖3 氣隙磁密諧波階次特性對比Fig.3 Comparison with FEA for the amplitude-order characteristic of permanent magnet field in the air gap
從圖4、圖5可以看出,除了第3階轉矩諧波之外,通過解析模型計算出的轉矩諧波頻率與幅值和用有限元方法計算出的結果基本一致。原因是解析模型與有限元模型的第17階磁密諧波計算差異造成的第17階磁鏈偏差。然而,第3階轉矩諧波比第1階轉矩諧波要小很多,因此,解析模型的精度仍舊較高。從上面的分析可以看出,該解析模型的準確性主要取決于氣隙磁密的計算精度。
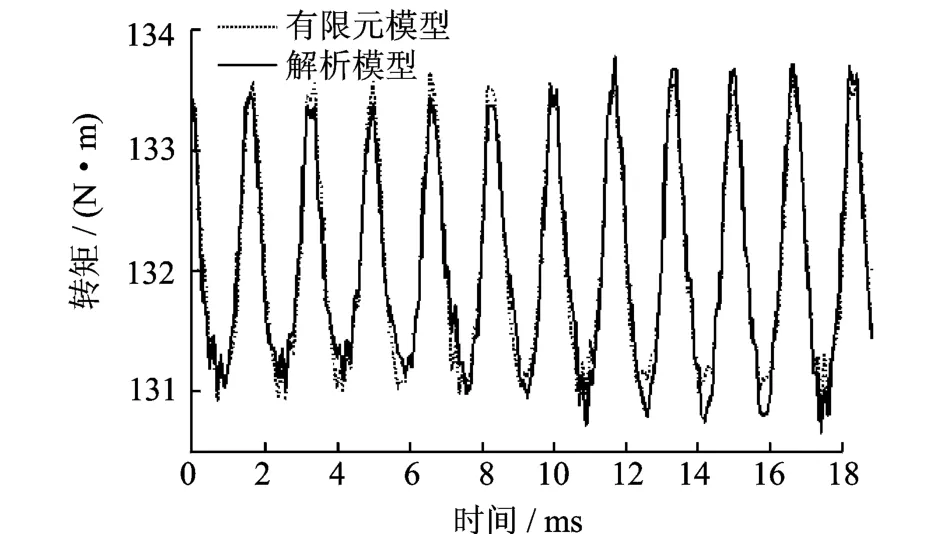
圖4 轉矩波動對比Fig.4 Comparison with FEA for the torque ripple
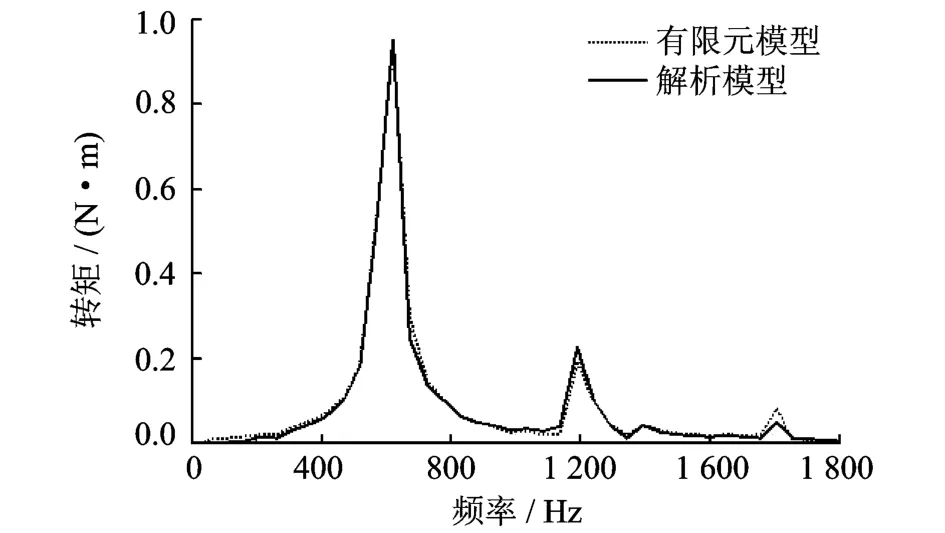
圖5 轉矩諧波幅頻特性對比Fig.5 Comparison with FEA for frequencies and amplitudes of torque harmonics
7 結束語
筆者提出了一種考慮定子開槽和高次諧波的永磁同步電機6i轉矩波動非線性解析模型。用這個解析模型,預測了6i階轉矩波動并分析了波動頻率。這從理論上解釋了電機總成與電動車車身階次振動的振源特性。
[1] 王建,張立軍,余卓平,等.燃料電池轎車電機總成的振動階次特征分析[J].汽車工程,2009,31(3):219-223. Wang Jian,Zhang Lijun,Yu Zhuoping,et al.An analysis on the vibration order feature of the electric motor assembly in a fuel cell car[J].Automotive Engineering,2009,31(3):219-223.(in Chinese)
[2] 馬琮淦,左曙光,何呂昌,等.電動車用永磁同步電機電磁轉矩的解析計算[J].振動、測試與診斷,2012,32(5):756-761. Ma Conggan,Zuo Shuguang,He Lüchang,et al.Analytical calculation of electromagnetic torque in permanent magnet synchronous motor for electric vehicles[J].Journal of Vibration,Measurement and Diagnosis,2012,32(5):756-761.(in Chinese)
[3] Borghi C A,Casadei D,Cristofolini A,et al.Minimizing torque ripple in permanent magnet synchronous motors with polymer-bonded magnets[J].IEEE Transactions on Magnetics,2002,38(2):1371-1377.
[4] de Ree J.la,Boules N.Torque production in permanent-magnet synchronous motors[J].IEEE Transactions on Industry Appliactions,1989,25(3):107-112.
[5] Ishikawa T,Yamada M,Kurita N.Design of magnet arrangement in interior permanent magnet synchronous motor by response surface methodology in consideration of torque and vibration[J].IEEE Transactions on Magnetics,2011,47(5):1290-1293.
[6] Ishikawa T,Slemon G R.A method of reducing ripple torque in permanent magnet motors without skewing[J].IEEE Transactions on Magnetics,1993,29(2):2028-2031.
[7] Kim K S,Lee H,Kim K,et al.Torque ripple improvement for interior permanent magnet synchronous motor considering parameters with magnetic saturation[J].IEEE Transactions on Magnetics,2009,45(10):4720-4723.
[8] Borghi C A,Casadei D,Cristofolini A,et al.Application of a multiobjective minimization technique for reducing the torque ripple in permanent-magnet motors[J].IEEE Transactions on Magnetics,1999,35(5):4238-4246.
[9] Proca A B,Keyhani A,EL-Antably A,et al.Analytical model for permanent magnet motors with surface mounted magnets[J].IEEE Transactions on Energy Conversion,2003,18(3):386-391.
[10]Colamartino F,Marchand C,Razek A.Torque ripple minimization in permanent magnet synchronous servodrive[J].IEEE Transactions on Energy Conversion,1999,14(3):616-621.
[11]Zhu Z Q,Howe D.Instantaneous magnetic field distribution in brushless permanent magnet dc motors,part 3:effect of stator slotting[J].IEEE Transactions on Magnetics,1993,29(1):143-150.
[12]Zhu Z Q,Howe D,Bolte E,et al.Instantaneous magnetic field distribution in brushless permanent magnet dc motors,part I:open-circuit field[J].IEEE Transactions on Magnetics,1993,29(1):124-135.
[13]李發海,朱東起.電機學[M].北京:科學出版社,2007:192-194.
[14]馬琮淦,左曙光,林福.考慮定子開槽和轉子諧波的表貼式永磁同步電機電磁轉矩快速計算軟件:中國,2012SR086246[P].2012-09-12.

U461.4;TB533
10.16450/j.cnki.issn.1004-6801.2015.02.001
馬琮淦,男,1987年5月生,博士生。主要研究方向為汽車系統動力學、機械結構振動與噪聲控制。曾發表《聲子晶體與輪邊驅動電動汽車振動噪聲控制》(《材料導報》2011年第25卷第8期)等論文。
E-mail:maconggan@163.com。
簡介:左曙光,男,1967年6月生,博士、教授、博士生導師。主要研究方向為汽車系統動力學、機械結構振動與噪聲控制。曾發表“燃料電池轎車驅動電機懸置的優化設計”(《振動、測試與診斷》2008年第28卷第1期)等論文。
E-mail:sgzuo@tongji.com。
*國家重點基礎研究發展計劃(973計劃)資助項目(2011CB711201);國家自然科學基金資助項目(51075302)
2013-01-17;
2013-03-15
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
華人時刊(2020年13期)2020-09-25 08:21:42
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24
