雙足步進作動壓電直線電機工作機理及試驗研究*
2015-11-03 04:00:53孫夢馨黃衛清劉偉華
振動、測試與診斷 2015年2期
關鍵詞:方向
王 寅, 孫夢馨, 黃衛清*, 劉偉華
(1.南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)(2.華僑大學精密測量技術及儀器研究中心 廈門,361021)
?
雙足步進作動壓電直線電機工作機理及試驗研究*
王寅1,2, 孫夢馨1, 黃衛清1*, 劉偉華1
(1.南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)(2.華僑大學精密測量技術及儀器研究中心 廈門,361021)
大行程和高精度是半導體加工、光波導封裝等現代精密制造領域對作動器提出的新要求,在傳統作動器中這兩個特性往往相互矛盾從而難以同時具備,為獲得滿足這一要求的作動器,本研究基于疊層壓電堆器件的特點提出了一種新型步進壓電直線電機的原理,詳細分析了它的作動機理,該原理方案具有較大的作動行程和較高的步進分辨率,同時其輸出推力與預壓力成正比,有望獲得較大的推力和自鎖力。在原理分析的基礎上,設計了電機的結構方案并加工了樣機,討論了該電機對裝配的特殊要求并對樣機的裝配進行了驗證實驗,樣機作動實驗結果驗證了該原理方案的可行性,并且在直流偏置50 V、峰峰值為100 V、頻率10 Hz的正弦電壓激勵下,樣機的平均速度達63.3μm/s,這與理論計算的相對偏差為6.9%。
壓電電機;步進;疊層壓電堆;交替作動
引 言
壓電陶瓷的逆壓電效應被應用在作動器上時具有高精度、快響應等特點,近年來得到廣大研究者的青睞[1-2]。為了使壓電材料產生足夠的變形輸出,往往需要在壓電片上施加較高的電壓,同時結構的共振也被利用來放大壓電材料的微變形。這不僅增加了驅動電路的復雜程度,而且結構的共振隨激勵頻率存在較強的非線性,這為作動器的控制帶來了許多技術難題。疊層壓電堆是從大電容技術中衍生出來的新型壓電集成元件,它采用多片壓電陶瓷疊層組合,其機械串聯,電路并聯式結構可使壓電元件在較低的驅動電壓下產生較大的應變,同時還能獲得較大的推力[3-4]。法國Cedrat公司、德國Elliptech公司以及德國PI公司采用疊層壓電堆已經使多種類型的壓電電機產品化,并在精密加工、空間探測等高端領域得到應用。國內相關研究機構也利用疊層壓電堆研制了多種壓電作動器[5-7]。
總體來說,采用疊層壓電堆的壓電作動器的工作模式主要分為3種:直動模式、步進作動模式和連續作動模式[8-12]。其中,直動模式利用疊層壓電堆自身變形或將自身變形經特定放大機構放大后直接推動運動物體移動,主要應用在微行程、高精度的場合,該類作動器局限在其有限的作動行程;步進模式就是為提高作動器的作動行程,采用多組疊層壓電堆協同作用運動物體或利用運動物體的慣性使之產生步進運動的大行程作動模式,該類作動器的技術難點在于機構復雜,作動器各部件對機械加工的精度要求以及對作動表面處理的要求都很苛刻;所謂連續模式就是采用疊層壓電堆作為激勵單元,使作動器以較高頻率作動運動物體使之產生連續運動,由于疊層壓電堆具有較高的電容,該類作動器的高頻驅動電源是技術難點[13-16]。
本研究提出了一種新型步進模式作動的壓電直線電機原理,它采用四組疊層壓電堆兩兩分別推動一個驅動足產生圓形軌跡運動,并使兩個驅動足交替作用動子從而使之產生步進運動。該直線壓電電機具有響應快、精度高、行程大的特點,在半導體加工、光纖對接領域有著廣闊的應用前景。
1 電機結構
步進壓電電機結構原理示意圖如圖1,電機可分為運動輸出組件,壓電作動組件,定子導向組件和預壓裝配組件組成,這些組件共同裝配在同一基座上。運動輸出組件由動子和導向部件構成,動子在導向部件上可單自由度直線運動;壓電作動組件是電機的動力源,它由4組疊層壓電堆分別兩兩正交布置推動一個驅動足,這一對驅動足共同固定在定子基體上;定子在定子導向部件約束下只能在垂直于動子的運動方向上運動;定子上的一對驅動足由預壓裝配組件的作用同時與動子表面緊密接觸。
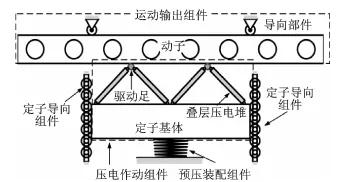
圖1 步進壓電電機結構原理示意圖Fig.1 Sketch view of stepping piezoelectric motor
2 工作原理
2.1驅動足運動軌跡
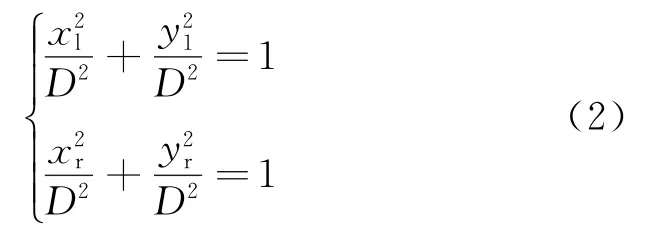
如圖2所示,定子上4組疊層壓電堆的激勵信號為帶直流偏置的正弦電壓信號,且兩兩相位差π/ 2。疊層壓電堆的變形與所加電壓近似呈正比關系,因此,將直角坐標系X1O1Y1原點平移至驅動足位置時左右兩個驅動足的運動軌跡可分別表示為
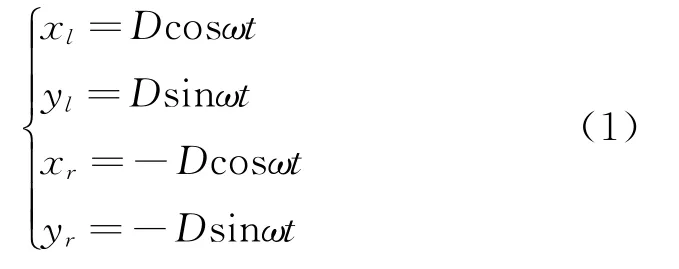
其中:D為疊層壓電堆在電壓為U時的伸長量的一半;ω為正弦電壓信號的角頻率;xl,yl分別為左驅動足在X1軸、Y1軸方向上的運動方程;xr,yr分別為右驅動足在X1軸,Y1軸方向上的運動方程。
消去時間參數ωt,可得
可見,兩個驅動足的運動軌跡都是大小相同的圓,如果將其中一個驅動足的圓軌跡平移到另一個圓軌跡上,兩個驅動足的位置在同一時刻始終都分別在圓的一條直徑的兩個端點上。
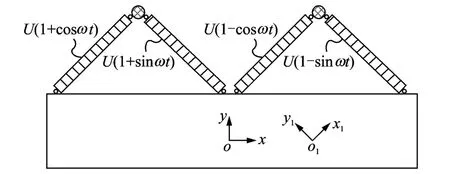
圖2 定子激勵信號Fig.2 Exciting signal of stator
2.2電機作動分析
下面就電機的一個作動周期T內的幾個典型狀態對電機的作動原理進行分析,如圖3所示。
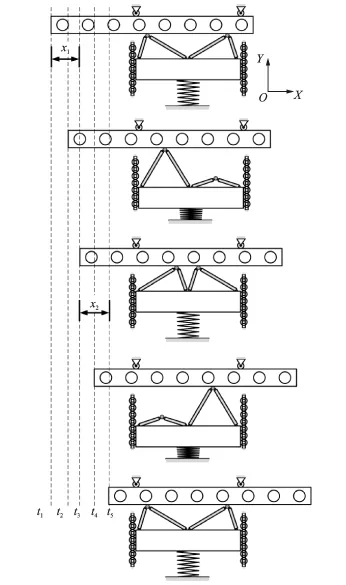
圖3 電機工作原理Fig.3 Operation principle of motor
t1=0時刻,右驅動足開始接觸動子,動子在摩擦力作用下與右驅動足一起沿X軸方向運動,左驅動足脫離動子并沿X軸負方向運動,定子基體沿Y軸負方向運動同時使預壓彈簧被壓縮;
t2=T/4時刻,右驅動足達到Y方向頂點位置,左驅動足運動到離動子最遠位置,此時動子隨右驅動足的速度達到最大,同時預壓彈簧的壓縮量達到最大;
t3=T/2時刻,左驅動足開始接觸動子,動子在摩擦力作用下與左驅動足一起沿X軸方向運動,右驅動足脫離動子并沿X軸負方向運動,此時動子隨左驅動足沿X軸方向前進的位移為x1=2D;
t4=3T/4時刻,左驅動足達到Y方向頂點位置,右驅動足運動到離動子最遠位置,此時動子隨左驅動足的速度再次達到最大,同時預壓彈簧的壓縮量達到最大;
t5=T時刻電機恢復到t1時刻的狀態,此時動子隨右驅動足沿X軸方向前進的位移為x2=2D。
如此,電機周期性運行,并在一個周期內兩個驅動足交替作用動子使動子實現單向運動,運動距離為4D。
在以上分析中,有一個準靜態假設,即假設驅動足的驅動頻率足夠低,在驅動足與動子接觸時二者無相對滑動,這樣驅動足與動子之間的摩擦力完全為靜摩擦力。動子沿X軸的運動位移可表示如下:

其中:運算符[X]表示對變量X取整。
從式(3)可看出,電機在半個周期內步進量是D,每個周期內動子步進兩次,其步進量與激勵電壓的幅值成正比,因此該電機可調節激勵電壓幅值改變步進量。由于驅動足與定子基體固定連接,定子基體也因為驅動足與動子之間的相互作用發生沿Y軸方向的往復運動,將直角坐標系XOY原點平移至t1時刻定子基體的質心處,則定子基體質心在直角坐標系XOY內的運動方程可表示為

由于預壓裝配組件中的彈簧預變形遠大于定子基體在工作過程中沿Y軸方向上往復運動的幅值,因此可忽略工作過程中驅動足與動子之間接觸力的變化。
在工作過程中,驅動足總是一個推動動子運動,另一個脫離動子并沿動子運動相反方向運動,因此,兩個驅動足在作動過程中的根據所在的接觸狀態的不同,運動軌跡也不同,將直角坐標系XOY原點平移至驅動足未發生運動時的位置,接觸動子的驅動足的運動方程表示為
則脫離動子的驅動足的運動方程可表示為
可見,由于兩個驅動足共同固定在定子基體上,與動子接觸的驅動足沿Y軸方向的運動分量都疊加在返程的驅動足的Y軸分量上,這對驅動足返程時有效脫離動子十分有利。
以上分析探討了動子的運動、定子基體及其驅動足的運動,對動子的位移公式(3)關于時間求一階導數可得到動子運動的瞬時速度方程:

該電機的推力完全取決于驅動足與動子之間的靜摩擦力,在預壓力為Fp的裝配條件下,電機的輸出推力為

其中:μs為驅動足與動子間的靜摩擦系數。
3 樣機實驗
3.1電機結構
依照上述原理,設計了電機的結構,如圖4所示。整個定子分為4個部分:兩個作動單元1和2,導向盒3以及預壓板簧4。其中作動單元1和2通過螺釘與導向盒3固定連接,兩個作動單元疊層放置,這樣可縮小兩個驅動足之間的距離使交替作用更易實現。通過調節螺釘33可以調節作動單元與動子之間的預壓力。
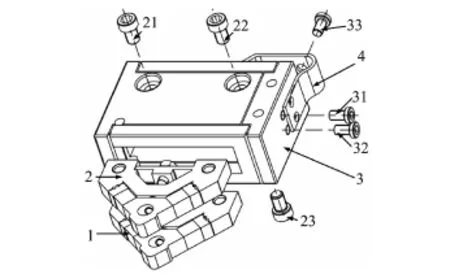
圖4 定子結構圖(1,2為作動單元;3為導向盒;4為預壓板簧;21,22,23,31,32為裝配螺釘,33為調節螺釘)Fig.4 Structure of stator(1,2 stand for actuation units;3 guiding box;4 preload spring;21,22,23,31,32 screws;33 adjusting screw)
作動單元的實物結構及大小如圖5所示,為了使兩組疊層壓電堆受到相等的預緊力,采用螺桿拉拔驅動足的方式對兩組疊層壓電堆預緊,該力由橫在定子基體底部的橫梁預變形產生的回復力提供。圖示疊層壓電堆為德國PI公司的產品PL055。
為驗證該原理電機結構的合理性,該樣機被用于一維運動平臺的驅動,如圖6所示。為在試驗中獲得較大的調整范圍,該電機用螺旋彈簧代替板簧施加定子和動子之間的預壓力。
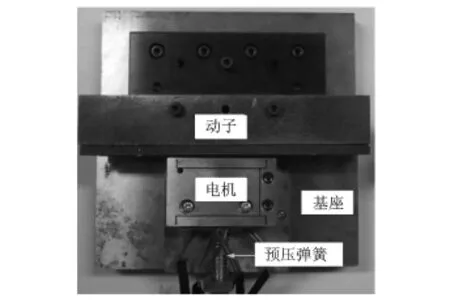
圖6 電機驅動一維滑臺實物圖Fig.6 One DOF stage driven by designed motor
3.2裝配檢驗
由作動原理可知,該電機實現交替步進的關鍵在于每個作動周期內兩個驅動足對動子的作用相同,這要求兩個驅動足在裝配后同時接觸動子表面。為滿足這一要求,對電機的定子在裝配時就需要特別處理,實際操作時需要對安裝好的兩個驅動足進行研磨并仔細調整定子相對動子的位置。為了驗證兩個驅動足已經同時接觸動子表面,采取了以下驗證試驗檢驗電機的裝配情況,即將4組疊層壓電堆按所作用驅動足的不同分為兩對,分別按圖2中激勵信號激勵每對疊層壓電堆,在激勵其中一對的同時另外一個不施加激勵,這時測量導向盒內作動單元在垂直于動子接觸面方向的振動。如果分別激勵每對疊層壓電堆時導向盒內作動單元都發生相同振幅的振動,就說明定子的安裝滿足要求。
按上述方式分別激勵兩對疊層壓電堆,并采用激光位移傳感器對兩個作動單元垂直于接觸面方向的振動進行了測量,結果如圖7所示。由圖可見,兩個驅動足在受電壓激勵時都能接觸動子,二者振幅分別是1.8和2.2μm,兩者相差0.5μm。這一差別可能是因為接觸面的平面度的加工精度在微米級,表面的起伏造成。這一差別也將導致兩個驅動足在一個周期內對動子的作用有所差別。

圖7 作動單元垂直于接觸面方向的振動Fig.7 Vibrations of actuation units along orthogonal direction
4.3作動實驗
為驗證作動機理,采用同樣的激光位移傳感器測量了在驅動足作用時動子的運動。驗證試驗分兩步進行,首先分別測量了單個驅動足在圖2所示激勵下動子的運動,如圖8所示。在直流偏置為50 V、峰峰值為100 V、頻率為10 Hz的正弦電壓激勵下,動子跟隨驅動足一起進行簡諧振動,振幅都是3.4μm。這也說明,在單驅動足作用下動子不能實現單向運動。
在完成單驅動足作用實驗后,四組疊層壓電堆同時施加電壓激勵,激勵方式按圖2所示,即用四相兩兩相位差π/2、直流偏置為50 V、峰峰值為100 V、頻率為10 Hz的正弦電壓激勵四組疊層壓電堆,這時動子的運動如圖9所示。可見在雙驅動足交替作用下,動子產生了單向運動,其直線運動在30 s內的位移為1 900μm,平均速度為63.3μm/s。根據式(3)和單驅動足的實驗測量結果,取D= 3.4μm,可計算出30 s內的位移應為2 040μm,平均速度應為68μm/s。產生這一差別的原因是,兩個驅動足并不是如作動原理所述的那樣在每個周期內對動子的作用完全相同,這一點從裝配驗證實驗的結果也得到了驗證。不過,試驗值與理論值的相對偏差為6.9%,二者已經比較接近。

圖8 單一驅動足作用動子時動子的運動Fig.8 Motion of mover driven by single actuation unit
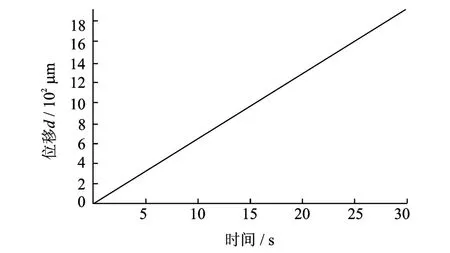
圖9 雙驅動足交替作用動子時動子的運動Fig.9 Motion of mover driven by alternatively actuation of double units
4 結束語
在概述壓電陶瓷材料特點的基礎上,總結了各類作動器利用壓電陶瓷逆壓電效應的多種方式,得出疊層壓電堆在低電壓驅動和高精度壓電作動場合應用的優勢;總結了現有壓電作動器的3種作動模式,并概述各種作動模式下的技術難點。提出了一種新型步進式直線壓電電機的原理方案并詳細分析了它的工作原理,該電機同時具有大行程、高精度和大推力的特性。設計了電機的機構并制作了樣機討論了樣機在裝配過程中需滿足的特定要求,用實驗方法證實了裝配的有效性,并通過試驗值和理論值的相對偏差比較驗證了樣機作動機理分析的合理性。
[1] 趙淳生.超聲電機技術與應用[M].北京:科學出版社,2007:53-57.
[2] 陶寶祺.智能材料結構[M].北京:國防工業出版社,1997:81-85.
[3] Uchino K,Takahashi S.Multilayer ceramic actuators[J].Current Opinion in Solid State and Materials Science,1996,1(5):698-705.
[4] Kim J,Lee J.Self-moving cell linear motor using piezoelectric stack actuators[J].Smart Materials and Structures,2005,1(14):934-940.
[5] 劉建芳,楊志剛,范尊強,等.壓電直線精密驅動器研究[J].光學精密工程,2005,13(1):65-72. Liu Jianfang,Yang Zhigang,Fan Zunqiang et al.Precise PZT linear step actuator[J].Optics and Precision Engineering,2005,13(1):65-72.(in Chinese)
[6] 劉建芳,楊志剛,程光明,等.壓電驅動精密直線步進電機研究[J].中國電機工程學報,2004,24(4):102-107. Liu Jianfang,Yang Zhigang,Cheng Guangming,et al. A study of precision pzt line step motor[J].Proceedings of the CSEE,2004,24(4):102-107.(in Chinese)
[7] 吳鷹飛,李勇,周兆英,等.蠕動式X-Y-θ微動工作臺的設計實現[J].中國機械工程,2001,12(3):263-265. Wu Yingfei,Li Yong,Zhou Zhaoying,et al.Design and development of an inchworm type of X-Y-θmicro stage[J].China Mechanical Engineering,2001,12(3):263-265.(in Chinese)
[8] Takano T,Tomikawa Y,Aoyagi M,et al.Piezoelectric actuators driven by the saw-tooth-like motion of a stator[J]Ultrasonics,1996,34(2):279-282.
[9] Chang S,Wang H.A high speed impact actuator using multilayer piezoelectric ceramics[J].Sensors and Actuators A:Physical,1990,24(3):239-244.
[10]Fleischer M,Stein D,Meixner H.Novel ultrasonic motors with mono-and bimodal drives[J].Sensors and Actuators A:Physical,1990,21(1):357-361.
[11]Fleischer M,Stein D,Meixner H.New type of piezoelectric ultrasonic motor[J].IEEE Transactions on Ultrasonic,Ferroelectrics and Frequency Control,1989,36(6):614-619.
[12]Wallaschek J.Piezoelectric ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures,1995,6(1):71-83.
[13]潘松,陳培洪,黃衛清.一種新型壓電直線電機的建模分析與實驗[J].機械與電子,2013(2):33-36. Pan Song,Chen Peihong,Huang Weiqing.Modeling and experiment of a new type piezoelectric linear motor[J].Machinery&Electronics,2013(2):33-36.(in Chinese)
[14]潘松,黃衛清,王寅,等.基于壓電作動器的直線電機及其高效驅動[J]光學精密工程,2011,19(10):2464-2471. Pan Song,Huang Weiqing,Wang Yin,et al.High efficiency driving of linear motor based on piezoelectric actuator[J].Optics and Precision Engineering,2011,19(10):2464-2471.(in Chinese)
[15]潘松,黃衛清.基于DC-DC升壓和LC振蕩的疊層壓電陶瓷驅動電源研究[J]科學技術與工程,2010,10(20):4925-4929. Pan Song,Huang Weiqing,Driving power for multilayer piezoelectric ceramic based on DC-DC and LC resonant[J].Science Technology and Engineering,2010,10(20):4925-4929.(in Chinese)
[16]潘松,黃衛清.新型壓電作動器驅動的直線電機驅動電源研究[J].機械與電子,2010(8):24-27. Pan Song,Huang Weiqing.Research on driving power for new type piezo linear motor driven by piezoelectric actuator[J].Machinery&Electronics,2010(8):24-27.(in Chinese)

TM356
王寅,男,1986年8月生,博士講師。主要研究方向為壓電精密致動技術。曾發表《A novel rotary ultrasonic motor using an in-plane traveling wave》(《Journal of the Korean Physical Society》2010年第57卷第4期)等論文。
E-mail:yin.wangyin@hqu.edu.cn
簡介:黃衛清,男,1965年4月生,博士教授、博士生導師。主要研究方向為壓電精密運動系統。曾發表《一種新型非共振壓電直線電機的設計》(《中國機械工程》2009年第20卷第14期)等論文。
E-mail:mehwq@nuaa.edu.cn
*國家自然科學基金資助項目(51375224);高等學校學科創新引智計劃資助項目(B12021)
2014-10-29;
2014-12-04
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
