基于Solidworks的農業信息采集系統設計
2015-10-21 17:46:51郭志越王偉莊煜張剛盧振孫躍志梁玉亮
森林工程 2015年4期
關鍵詞:物聯網
郭志越 王偉 莊煜 張剛 盧振 孫躍志 梁玉亮

摘要:農田信息采集系統已經成為農業物聯網信息化的一個熱點研究領域。如何為農業科技研究人員、農田業主提供更為精確的參考數據,如何通過物聯網技術,實現不同系統與監測點間的信息共享,為解決這一問題,設計農田信息采集系統。首先對國內外農田信息采集現狀進行分析,提出農田信息采集系統的設計方案,應用solidworks三維建模與仿真技術建立系統的虛擬模型,并進行仿真研究。對solidworks虛擬模型進行實物模擬車型的加工、裝配和實驗,通過對實驗結果進行分析、對比,證明農業信息采集系統可以在大棚內進行信息采集,并將信息傳送至附近的接收點,解決以往農業大棚信息節點采集繁瑣和困難的問題。
關鍵詞:物聯網;農田信息;信息采集;輪式機器
中圖分類號:S776
文獻標識碼:A
文章編號:1001-005X(2015)04-0092-06
隨著物聯網技術在農業中的推廣應用,利用小型移動設備作為載體,進行農田信息的采集,亦已成為我國農業信息采集系統研究和發展的必然趨勢。目前國內農業系統主要用于耕種、采摘、除草等工作,但農業生產還需要大量的、實時的各種農田信息作為人工調控和管理決策的依據,比如土壤信息、作物生長信息等。針對農業信息采集的特點,設計基于物聯網的農田信息采集系統,該系統可搭載用于農田作物信息采集的多種傳感器如:土壤pH值、土壤含水量、濕度等傳感器,以實時地獲取農作物生長環境和生長情況信息,并通過物聯網,實現不同系統與監測點間的信息共享,實現農田作物生長環境和生長情況的動態、實時監測及農田信息化管理。系統作為信息采集的平臺,移動靈活,可靠性高,機構質量盡可能小。設計的好壞是整個系統性能優劣的重要指標,在農田表面地形復雜、未知的環境中,系統必須具有性能優越、自適應能力強的特點,才能有效完成任務。
1 系統運動方式與電機的選擇
1.1 系統運動方式選擇
目前,農田信息采集機器的移動機構主要分為:履帶式、腿式和輪式3種,且還有其中的結合形式,如輪一履式等。
(1)履帶式。履帶最早出現于坦克和裝甲車上,后來用于某些地面行走機器人上,履帶行走機構由于其接觸面積大,附著能力強,能夠減少對土壤的碾壓,具有良好的地面適應性和良好的穩定性,能夠通過配合各種農具,則能在泥濘土地可以進行良好的作業。但履帶式機器人轉彎半徑過大,轉向方式不夠靈活,且當地面環境惡劣時,履帶很快會被磨損而失效,而復雜的履帶和數量過多驅動輪使得機器人笨重不堪。而且履帶式機器人機械結構設計復雜,且運動學分析及控制設計計算十分困難,而在行走空間受到限制的場合里,難以發揮其履帶式的性能。
(2)腿式。腿式的行走機構,無論是對地面的適應性和翻越障礙的能力都是輪式和履帶式無法比較的,腿式機器人在平移時,質心會發生很大的變化,如果運動的不協調,就會發生翻倒現象,所以在設計腿式結構機器人時,要根據其結構特點,且設計出一大系列的運動控制算法,且運動學的分析也比較困難,所以在一定程度上對于自主設計具有很大的難度。
(3)輪式。行走機構中最簡單,應用最為廣泛,也是最常見的機構。通常的行走機構有四輪運動機構,輪式移動機器人具有運動穩定、操縱簡單、結構輕巧、移動速度迅速和方向容易控制。而懸架結構和車輪底盤的出現,使得輪式移動機器人能夠適應各種崎嶇不平的路面,并且能夠翻越一定程度的障礙物等。
通過以上3種分析:選用輪式移動結構作為農田信息采集系統的運動方式。
1.2 系統驅動方案選擇
農田信息采集系統必須具備驅動裝置和轉向裝置,而電機是比較普遍使用的驅動器。通過電子控制技術對電機實現準確的控制,就能夠實現精確運動。驅動裝置主要有下面兩種方式布置:
(1)集中驅動方式,把驅動電機放置在車體上,在通過傳動機構,能夠將動力輸出到每個輪子上,使車輪運動。
(2)集中控制一分布驅動方式。在每個車輪上都安裝電機,驅動車輪運動或轉向,電機由安裝在車體上的控制系統控制其轉動速度,轉動或停止。這種結構簡單,便于實現,且有利于運動機構的性能的發揮。
農田信息的采集,路面情況都比較差,需承載能力強,需攜帶各種各樣的傳感器,甚至需要攜帶機械手等,能夠有效的翻越陡坡等路面情況,故選用集中控制一分布驅動方式,并通過4個電機能夠提供更大的力和轉矩。
1.3 電機的選擇
直流電機雖然不比交流電動機結構簡單,制造容易,維護方便,運行可靠。但長時間以來交流電動機的調速問題仍然未能得到較好的解決。所以在此之前,直流電動機具有交流電動機不能比擬的良好的啟動調速控制性能。
故計算過程如下。
(1)電動機轉矩的確定
機器人重量20kg,對其進行運行阻力和電機功率及轉矩的計算。
G=20kgx9.8N/kg。
μ=0.015,d=40mm,D=140mm.
①運行阻力的計算
車輪與軸承之間的摩擦力:
②車輪與地面間的摩擦力:
滾動阻力系數:
滑動摩擦系數:f=0.36,即
③慣性阻力:
④系統總驅動力為:
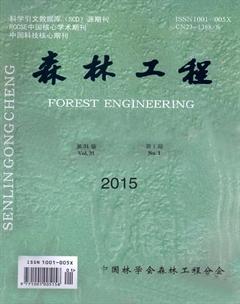
⑤地面與車輪的摩擦因數為f=0.36
電動機轉速為w=35.2rad/s。
驅動軸上驅動輪處的轉矩為:
電動機軸負載轉矩為:
TL=2T。
(7)
TL=2T=2 x1.2348 =2.4696N/m.
設電動機效率η=0.9則穩定負載功率為:
加速度轉矩為:
加速度功率為:
電動機輸出功率額定容量為:
⑥電動機轉矩的確定:
電動機的減速比i=9:1。
(13)
則電動機轉矩為:
2 農業信息采集系統總體結構方案及參數選擇
2.1 農業信息采集系統總體結構
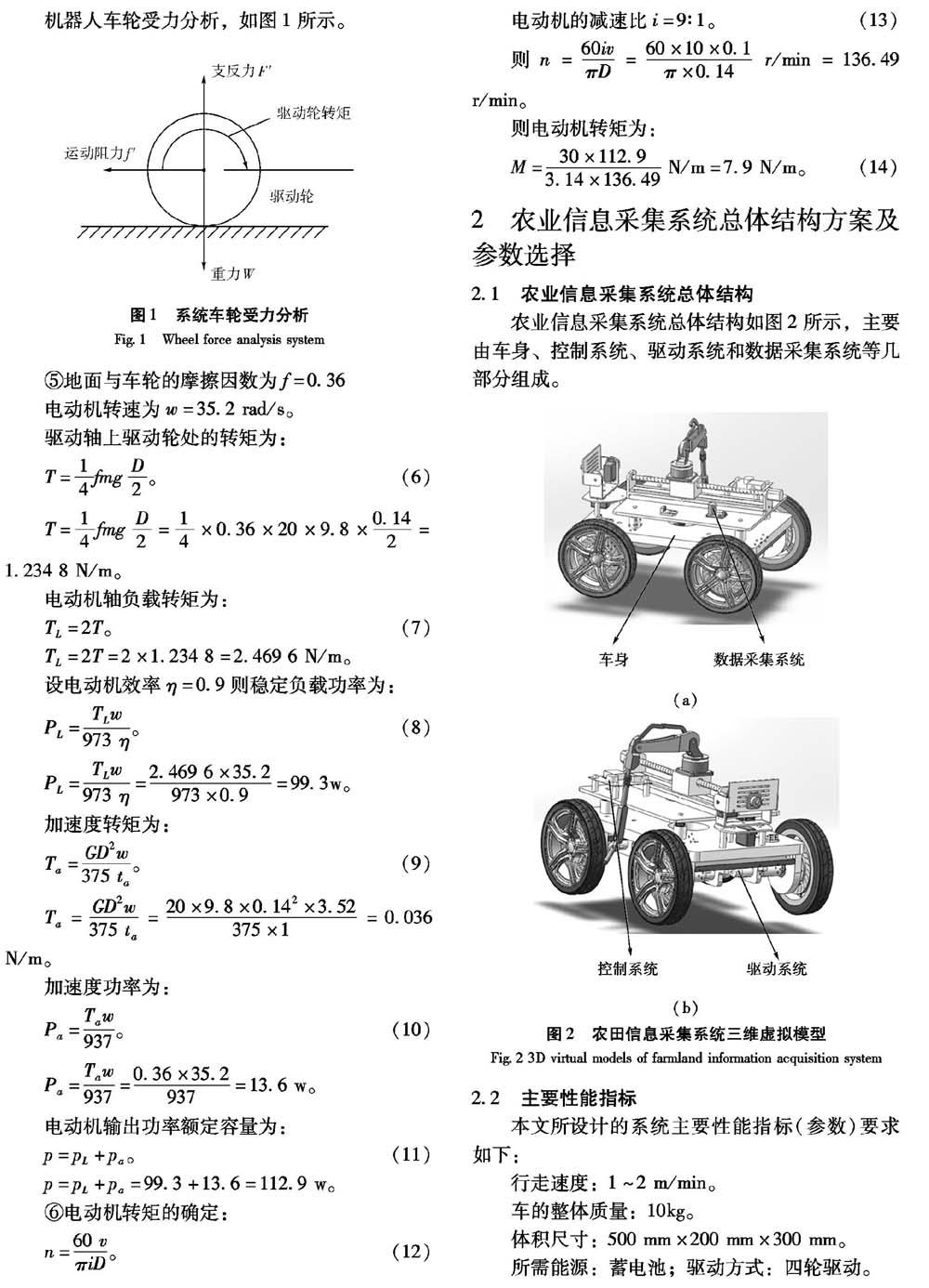
農業信息采集系統總體結構如圖2所示,主要由車身、控制系統、驅動系統和數據采集系統等幾部分組成。
2.2 主要性能指標
本文所設計的系統主要性能指標(參數)要求如下:
行走速度:1~2m/min。
車的整體質量:lOkg。
體積尺寸:500mm x200mm×300mm。
所需能源:蓄電池;驅動方式:四輪驅動。
2.3 工作原理及基于SolidWorks的虛擬仿真
2.3.1 工作原理
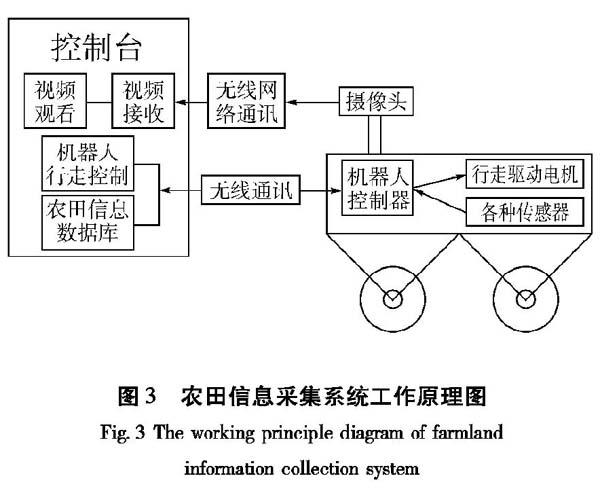
信息采集系統的工作原理:系統在農田通過攝像頭和各種傳感器進行信息采集,通過無線通訊模塊將采集的信息反饋給控制臺。控制臺根據系統行走情況,進行信息的統計處理和進一步的分析,將有用信息存儲到農田信息庫,并通過無線通訊發出指令到系統控制器,實現系統的下一步的工作指令。
2.3.2 基于SolidWorks的虛擬仿真
Solidworks的虛擬仿真,盡可能簡化機構模型,降低硬件要求,加快系統的運行速度,具體操作過程如下:
(1)建立模型。建立采摘轉軸和支撐架簡化模型,如圖3所示。由轉軸和支撐架組成的系統中,剛度相當大,變形小,可以認為是剛體。因此,在由轉軸和支撐架組成的系統中,除減震墊等墊圈當做柔性體以外,其余主要部件可以認為是剛體,建立轉軸和支撐架的剛性體。
(2)添加載荷。軸、軸承和支撐架之間組成轉動副;支撐架與車身為螺栓連接。
(3)運行仿真。經過多次試驗仿真結果。
仿真結果:轉軸在以10r/min左右的速度旋轉時,對與其接觸的軸承和車輪的作用力介于0.13~3.26N之間,該作用力介于轉軸和支撐架的結合力之間,同時該作用力也遠小于轉軸的許用應力。因此,理論上轉軸滿足要求,能夠正常工作。支撐架與其接觸的軸承和車身的作用力介于0.25~2.5N之間,該作用力介于轉軸和支撐架的結合力之間。因此,理論上支撐架滿足要求。
3 農業信息采集機器人主要部分設計
3.1 車身結構設計
移動系統車體采用合金鋁框架式多層結構,如圖2所示。車身一層,主要安裝云臺、直流電源及CCD攝像頭等CCD攝像頭安裝在云臺上,均可在水平面上旋轉和上下俯仰,從而提高了系統對環境的探測能力。車身二層,主要安裝控制板卡、溫度傳感器、濕度傳感器,根據需要安裝其它設備或傳感器。車身結構緊湊,易于維護,提高了控制系統的抗干擾能力。云臺的設計主要是為了實現車載攝像頭在水平方向的旋轉運動和軸向的俯仰運動,從而帶動安裝其上的攝像頭可多角度拍攝農作物生長狀況。通過機械手可以很方便地將土壤pH值傳感器插入到土壤中,完成測量。機械手的前后移動是通過滾珠絲杠來實現的,機械手的手臂部分能實現3個自由度,即在關節處安有3個角度舵機。
3.2 控制系統設計
主控制器部分是整個系統的核心,它主要將從傳感器獲得環境信息然后進行決策運算與發出控制信號,并進行人機交互等,它承擔了系統運動的大量實時計算工作,所以其性能將直接影響系統的實時性能。
本設計采用直插式STC89C52RC芯片作為移動系統小車的控制芯片,它的主要功能是通過控制其輸出引腳的電平高低,讓電機驅動芯片驅動電機正轉或者反轉,實現系統的前進、后退、轉向以及溫度、濕度信息的采集。電機驅動模塊集成有6~9V電壓轉換電路,可以對小車輸入6~9V電壓,并自帶多路SV拓展輸出。選擇集成性能更強的帶電機剎車功能的L293D作為電機驅動芯片,驅動直流電機工作。基于單片機的行走機構控制系統硬件電路如圖4所示。由51單片機、電源供電系統、電機驅動模塊、紅外接收模塊等組成。實現了行走機構路徑識別,軌跡跟蹤等功能。
驅動系統設計思路:采用四輪驅動的方式控制機器人的運動,在四個輪子對應的相應位置安裝四個直流減速電機。選用AT89C2051作為從CPU控制電機的轉速。該設計系統中采用脈沖寬度調制技術PWM實現對直流電動機的準確與靈活調速。
3.3 數據采集一傳感器系統設計
傳感系統包括溫度、濕度傳感器、CCD攝像頭、紅外避障模塊等,選擇進口紅外探頭,該探頭具有不怕光的特點,帶有可調式電位器,探測距離可調,精度高,有效實現系統避障功能。視頻采集CCD攝像頭選擇HD720P高清攝像頭。該攝像頭即插即用免驅,支持實地視頻拍攝,1280 x720(默認),拍照像素尺寸為1200萬像素(軟件增強),適應接口為USB3.0,顯示幀率為最快60幀/s,成像距離為7CM(支持微距),并內置降噪功能的智能數字麥克風,可完成對智能大棚作物生長情況拍照,錄像任務。選擇溫濕度檢測傳感器DHT11檢測智能大棚溫度、濕度。SHTlx單片數字溫濕度集成傳感器的濕度范圍0~100%RH、溫度范圍-40~128.8℃,測濕精度±4.5%RH、測溫精度±0.5℃(25℃)。
3.4 模擬車型的搭建
圖5為系統的配置情況。因需保護電機輸出軸,避免連接驅動輪帶來的負荷直接作用在電機軸上扭矩的有效傳遞。根據要求設計圖示裝配結構,如圖6所示。該裝配結構緊湊,輪軸的受力好,受到沖擊不易彎曲。圖示的輪子可在市場上購買,且兩側支撐的結構使輪軸的受力良好;支撐處內有軸承,使運動靈活。
操作人員在控制點通過射頻接收裝置,接收由機器人射頻發射裝置發送的信息,在信息接收端界面可以顯示測得的農作物生長信息,如溫度、濕度、pH值等,也可以通過攝像頭顯示農作物生長情況。試驗分兩部分:一是先在大棚中實現直行和轉彎;二是采集農作物信息并傳輸到控制點。
3.5 試驗結果分析
農業信息采集系統在采集信息的過程中,通過五點法在大棚中選取了十個位置,在不同的時間段進行信息采集,見表1,并通過通信系統發送到接收點。綜上所述,針對傳統農業大棚信息監測系統的不足,設計并實現了一種基于solidworks的農業大棚信息采集,試驗表明農業信息采集系統采集的信息數據精度高,符合農業大棚信息無線監測的要求,具有操作簡便、抗干擾能力強等諸多優點,能穩定可靠地監測農業大棚信息。
4 結束語
本文通過對農田信息采集系統的設計和分析,主要完成工作如下:
(1)通過對國內外移動系統行走機構的研究分析,提出了可以滿足具有采集農田信息功能的系統的總體設計要求和設計指標要求。
(2)完成了農田信息采集系統行走機構的結構設計,利用solidworks軟件對系統結構進行建模,建立了系統結構的虛擬樣機模型。
(3)建立了系統的樣機,并對其進行了分析,最終試驗結果證明,該系統行走機構能夠達到所設計的要求和目標。 本課題通過對農業信息采集系統車身、控制系統、驅動系統和數據采集系統等部分設計,利用計算機輔助設計方法,建立了系統虛擬模型,對系統進行優化分析,得到了性能優越的參數組合,據此設計制造了系統物理樣機,并進行了行走試驗、信息采集試驗。使機器人具備了在大棚中自動避障,檢測溫、濕度等數據和觀察作物生長狀況的能力。
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06