基于高速提花機(jī)傳動(dòng)機(jī)構(gòu)的分析與研究
2015-09-02 05:45:45軍無(wú)錫艾諾科技有限公司江蘇無(wú)錫214028
裝備機(jī)械 2015年4期
□楊 軍無(wú)錫艾諾科技有限公司 江蘇無(wú)錫 214028
基于高速提花機(jī)傳動(dòng)機(jī)構(gòu)的分析與研究
□楊 軍
無(wú)錫艾諾科技有限公司 江蘇無(wú)錫 214028
根據(jù)提花機(jī)的工作原理以及紡織織物形成的原理,指出提花機(jī)開(kāi)口機(jī)構(gòu)是織機(jī)的主運(yùn)動(dòng)機(jī)構(gòu)之一,強(qiáng)調(diào)了開(kāi)口機(jī)構(gòu)的作用。通過(guò)對(duì)目前凸輪式開(kāi)口機(jī)構(gòu)提刀的位移曲線(xiàn)、速度曲線(xiàn)、加速度曲線(xiàn)和躍度曲線(xiàn)的運(yùn)動(dòng)規(guī)律進(jìn)行分析,研究凸輪式開(kāi)口機(jī)構(gòu)不能滿(mǎn)足高速運(yùn)轉(zhuǎn)的缺點(diǎn)及其原因,并在滿(mǎn)足相同的織機(jī)主軸轉(zhuǎn)速條件和滿(mǎn)足相同的開(kāi)口量條件下,提出另一種開(kāi)口機(jī)構(gòu)——連桿機(jī)構(gòu)式開(kāi)口機(jī)構(gòu)。建立組合連桿機(jī)構(gòu)的運(yùn)動(dòng)模型,采用復(fù)數(shù)矢量分析法計(jì)算該連桿機(jī)構(gòu)式開(kāi)口機(jī)構(gòu)提刀位移曲線(xiàn)、速度曲線(xiàn)、加速度曲線(xiàn)和躍度曲線(xiàn)的變化規(guī)律,并把此運(yùn)動(dòng)規(guī)律與凸輪式開(kāi)口機(jī)構(gòu)的運(yùn)動(dòng)規(guī)律進(jìn)行對(duì)比分析,得到了連桿機(jī)構(gòu)式開(kāi)口機(jī)構(gòu)能滿(mǎn)足高速運(yùn)轉(zhuǎn)的結(jié)論,并確定以連桿機(jī)構(gòu)式開(kāi)口機(jī)構(gòu)代替凸輪式開(kāi)口機(jī)構(gòu)的傳動(dòng)機(jī)構(gòu)。
隨著世界經(jīng)濟(jì)向全球化發(fā)展,各行各業(yè)的競(jìng)爭(zhēng)日益加劇,紡織品生產(chǎn)開(kāi)始向小批量、多品種趨勢(shì)發(fā)展。以往簡(jiǎn)單開(kāi)口形式的機(jī)器已經(jīng)無(wú)法滿(mǎn)足市場(chǎng)需求,因此有必要開(kāi)發(fā)提花機(jī),增加紡織物品種,提高速度,以求達(dá)到高速高效,跟上國(guó)際潮流。但目前由凸輪機(jī)構(gòu)傳動(dòng)的高速提花機(jī)在保證一定的開(kāi)口量上出現(xiàn)了運(yùn)動(dòng)不平穩(wěn)、振動(dòng)大、運(yùn)動(dòng)性能差等情況,還無(wú)法完全適應(yīng)高速發(fā)展的紡織市場(chǎng)需求,所以有必要對(duì)目前高速提花機(jī)進(jìn)行分析與研究,提出另一種高速提花機(jī)運(yùn)動(dòng)機(jī)構(gòu)——連桿機(jī)構(gòu)傳動(dòng)。
1 高速提花機(jī)開(kāi)口機(jī)構(gòu)的作用
在現(xiàn)代紡織機(jī)器上,開(kāi)口、引緯和打緯運(yùn)動(dòng)是使經(jīng)緯相互交織而形成織物的三大主要運(yùn)動(dòng)。要實(shí)現(xiàn)經(jīng)、緯的交織,必須把經(jīng)紗按一定的規(guī)律分成上下兩層,形成能通過(guò)緯紗的通道,這就是梭口。
機(jī)織物都是由縱向的經(jīng)紗和橫向的緯紗交織而成的,交織的規(guī)律稱(chēng)為織物組織。經(jīng)紗覆蓋在緯紗上的交織點(diǎn)稱(chēng)為經(jīng)浮點(diǎn),緯紗覆蓋在經(jīng)紗上的交織點(diǎn)稱(chēng)緯浮點(diǎn)。經(jīng)緯兩個(gè)方向經(jīng)過(guò)一定根數(shù)后,經(jīng)緯組織點(diǎn)浮、沉規(guī)律出現(xiàn)重復(fù)時(shí),稱(chēng)為一個(gè)組織循環(huán)或一個(gè)完全組織。
2 凸輪開(kāi)口機(jī)構(gòu)的分析
凸輪開(kāi)口機(jī)構(gòu)是目前高速提花機(jī)的一種傳動(dòng)機(jī)構(gòu),它可以保證紡織織布機(jī)所必須的一定開(kāi)口量。2.1凸輪開(kāi)口機(jī)構(gòu)的運(yùn)動(dòng)分析
圖1為目前凸輪開(kāi)口機(jī)構(gòu)的原理圖,下面對(duì)其進(jìn)行運(yùn)動(dòng)分析,分成兩個(gè)部分。

圖1 凸輪開(kāi)口機(jī)構(gòu)原理圖
第一部分如圖2所示,已知凸輪以ω0=2πn勻速順時(shí)針轉(zhuǎn)動(dòng),凸輪轉(zhuǎn)角為θ,φ1為滾子從動(dòng)件的擺角,其中φmax為最大擺角。從動(dòng)件推程和回程均作簡(jiǎn)諧運(yùn)動(dòng),已知:φ為推程運(yùn)動(dòng)角,φs為遠(yuǎn)休止角,φ'為回程運(yùn)動(dòng)角,φ's為近休止角。該凸輪轉(zhuǎn)一圈的一個(gè)運(yùn)動(dòng)周期內(nèi)需分為4個(gè)過(guò)程:①推程階段,②遠(yuǎn)休止階段,③回程階段,④近休止階段。
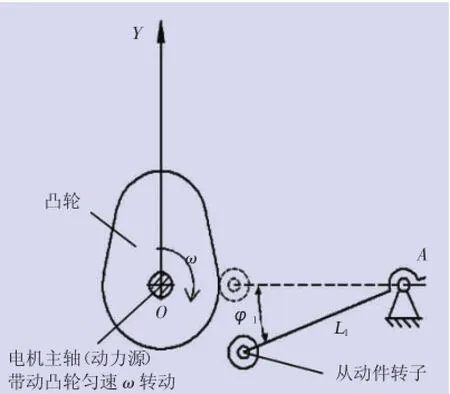
圖2 凸輪傳動(dòng)機(jī)構(gòu)的原理圖
①當(dāng)0≤θ≤φ,從動(dòng)件為推程階段。




式中:ω1為φ1角度的角速度;ω0為凸輪旋轉(zhuǎn)角度的角速度;α1為角度φ1的角加速度(角速度對(duì)時(shí)間的導(dǎo)數(shù);J1為φ1角度的躍度(角加速度對(duì)時(shí)間的導(dǎo)數(shù))。
②當(dāng)φ≤θ≤φ+φs,從動(dòng)件為遠(yuǎn)休止階段。
φ1=φmax
ω1=0
α1=0
J1=0
③當(dāng)φ+φs≤θ≤φ+φs+φ',從動(dòng)件為回程階段。α




φ1=0
ω1=0
α1=0
J1=0
第二部分如圖3所示,對(duì)提刀的位移、速度、加速度和躍度分別進(jìn)行分析。

圖3 提刀運(yùn)動(dòng)原理圖
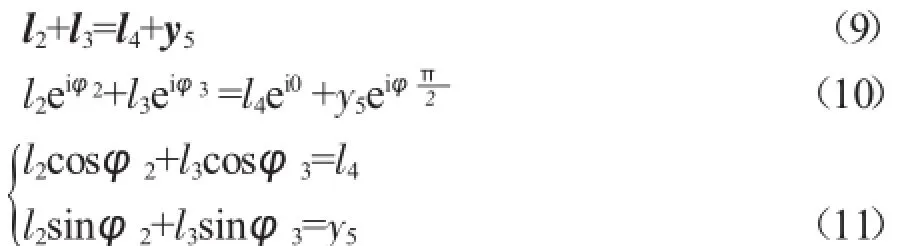
(1)位置分析。該機(jī)構(gòu)的封閉失量方程式為:
由式(11)得:

由式(11)得:

由于φ2=φ1(對(duì)角相等),又由于從動(dòng)件滾子分為4個(gè)過(guò)程,φ1有①、②、②、④4個(gè)階段。即:作滑塊運(yùn)動(dòng)的提刀C的位移方程y5也有相應(yīng)的4個(gè)方程式。
(2)速度分析。將式(10)對(duì)時(shí)間求導(dǎo)數(shù),得:

式中:v5為提刀的速度。
為了消去ω3,將上式兩邊分別乘以e-iφ3,得:

按歐拉公式展開(kāi)后,取實(shí)部,得:
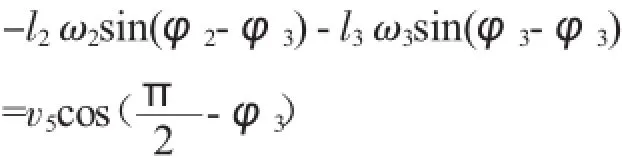
式中:φ2=φ1,ω2=ω1,有①、②、③、④4個(gè)階段。
同理,將式(12)展開(kāi):

取實(shí)部,得:
角速度為正,表示逆時(shí)針?lè)较颍粸樨?fù),表示順時(shí)針?lè)较颉?/p>
(3)加速度分析。將式(12)對(duì)時(shí)間求導(dǎo)數(shù),得:

為了消去a3,將式(14)兩邊乘e-iφ,得:

取實(shí)部,得:

所以:

同理,對(duì)式(14)取實(shí)部,得:所以:


其中a2=a1,由①、②、③、④4個(gè)階段角加速度的正、負(fù)號(hào)可表明角速度的變化趨勢(shì),角加速度與角速度同號(hào)表示加速,反之則為減速。
(4)躍度分析。將式(14)對(duì)時(shí)間求導(dǎo),得:

為了消去J3,將上式兩邊乘e-iφ,得:


取實(shí)部,得:

即:


其中J2=J1,分①、②、③、④4個(gè)階段。
2.2 凸輪開(kāi)口機(jī)構(gòu)運(yùn)動(dòng)分析的結(jié)論
通過(guò)使用Microsoft Visual Studio 2008軟件的分析,具體運(yùn)動(dòng)曲線(xiàn)如圖4~7所示。
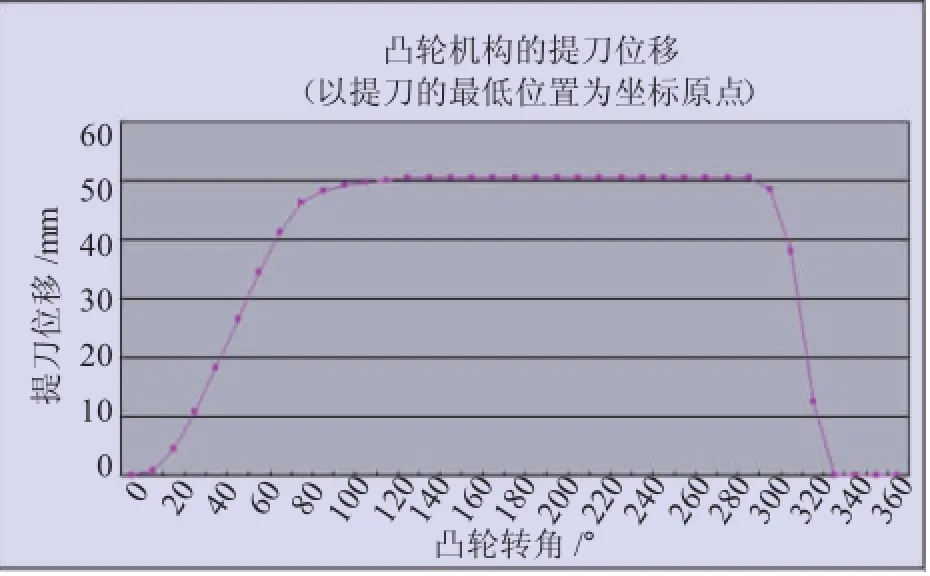
圖4 凸輪機(jī)構(gòu)中提刀的位移

圖5 凸輪機(jī)構(gòu)中提刀的速度

圖6 凸輪機(jī)構(gòu)中提刀的不連續(xù)加速度曲線(xiàn)
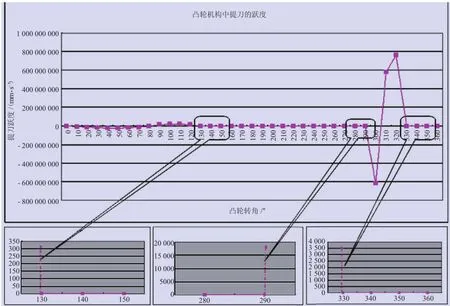
圖7 凸輪機(jī)構(gòu)中提刀的不連續(xù)躍度曲線(xiàn)
由圖4和圖5可看出,凸輪開(kāi)口機(jī)構(gòu)中提刀的位移曲線(xiàn)和速度曲線(xiàn)是連續(xù)的,但從圖6和圖7顯示,其加速度曲線(xiàn)和躍度曲線(xiàn)都是跳躍、不連續(xù)的。由凸輪機(jī)構(gòu)傳動(dòng)的提花機(jī)開(kāi)口機(jī)構(gòu)由于開(kāi)口有較長(zhǎng)的停頓時(shí)間,在滿(mǎn)開(kāi)時(shí)其躍度曲線(xiàn)不連續(xù),所以高速運(yùn)轉(zhuǎn)時(shí)會(huì)產(chǎn)生一定的振動(dòng)。
2.3 凸輪開(kāi)口機(jī)構(gòu)從動(dòng)件振動(dòng)的分析
凸輪是具有曲線(xiàn)輪廓或溝槽的構(gòu)件,當(dāng)它運(yùn)動(dòng)時(shí),通過(guò)其上的曲線(xiàn)輪廓與從動(dòng)件的高副接觸,使從動(dòng)件獲得預(yù)期的運(yùn)動(dòng)。凸輪機(jī)構(gòu)的組成是由凸輪、從動(dòng)件、機(jī)架這3個(gè)基本構(gòu)件所組成的一種高副機(jī)構(gòu),凸輪機(jī)構(gòu)是具有分布質(zhì)量及彈性的系統(tǒng),因此在凸輪機(jī)構(gòu)本身的慣性力及凸輪制造誤差激振下將產(chǎn)生振動(dòng)。在凸輪運(yùn)轉(zhuǎn)速度較低時(shí),由于振動(dòng)小而被忽略不計(jì),可以認(rèn)為低速時(shí)從動(dòng)件的實(shí)際運(yùn)動(dòng)與其理論運(yùn)動(dòng)相互吻合。但在高速時(shí),機(jī)構(gòu)的振動(dòng)將對(duì)從動(dòng)件的運(yùn)動(dòng)以及從動(dòng)件的慣性力產(chǎn)生明顯的影響,引起從動(dòng)件的運(yùn)動(dòng)誤差,產(chǎn)生噪聲和加劇凸輪表面的磨損。
以下對(duì)凸輪運(yùn)轉(zhuǎn)過(guò)程中從動(dòng)件產(chǎn)生的振動(dòng)作一分析,為揭示凸輪運(yùn)動(dòng)以及凸輪運(yùn)轉(zhuǎn)速度對(duì)從動(dòng)件的振動(dòng)或運(yùn)動(dòng)誤差的影響,建立如圖8所示的單自由度動(dòng)力學(xué)模型來(lái)分析從動(dòng)件對(duì)凸輪運(yùn)動(dòng)的響應(yīng)。圖中:m為從動(dòng)件末端的等效質(zhì)量;ω為凸輪轉(zhuǎn)動(dòng)的角速度;P為壓縮彈簧的預(yù)緊力;Q為外載荷,設(shè)為常數(shù)。

圖8 凸輪機(jī)構(gòu)的等效單自由度動(dòng)力學(xué)模型
得到以下公式:
my"=Fk-Fkr-P-Q (15)
式中:Fk=k(s-y);k為從動(dòng)件桿系的等效剛度;s為從動(dòng)件與凸輪接觸點(diǎn)的位移;y為從動(dòng)件末端質(zhì)量m的位移。
Fkr=kry (16)
式中:kr為壓縮彈簧(用以保持從動(dòng)件與凸輪表面的接觸)的剛度。
由于外載荷Q及預(yù)緊力P只引起從動(dòng)件桿系的靜變形,在分析從動(dòng)件的動(dòng)響應(yīng)時(shí)可不考慮,將式(15)轉(zhuǎn)化為:
my"+(k+kr)y=ks (17)
式中:θ為凸輪轉(zhuǎn)角。
可以得到以凸輪轉(zhuǎn)角θ為坐標(biāo)的運(yùn)動(dòng)微分方程:


式(19)可以改寫(xiě)為:

式中:τ2表示為頻率比τ的二次平方。
現(xiàn)就此凸輪機(jī)構(gòu)來(lái)分析從動(dòng)件對(duì)簡(jiǎn)諧運(yùn)動(dòng)規(guī)律的主振響應(yīng)及余振響應(yīng)。
簡(jiǎn)諧運(yùn)動(dòng)的位移方程為:

式中:S為從動(dòng)件與凸輪接觸點(diǎn)的位移;h為從動(dòng)件的行程。
可得:

其解為:

式中:A、B為常數(shù)。
根據(jù)從動(dòng)件初始運(yùn)動(dòng)條件:θ=0,y=y′=0;
所以
從動(dòng)件的主振或運(yùn)動(dòng)偏差為:
(θ≥θ0)
03的主振曲線(xiàn),如圖9所示。
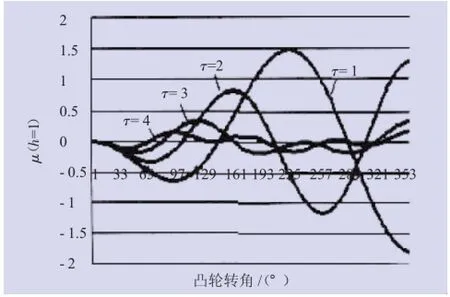
圖9 從動(dòng)件主振曲線(xiàn)
由圖9可知,隨著凸輪運(yùn)轉(zhuǎn)速度的提高(即τ的減小),從動(dòng)件的主振及余振增大,在低速時(shí)(即τ很大時(shí))從動(dòng)件的主振及余振減小直至趨向于零,這就充分表明了凸輪運(yùn)轉(zhuǎn)速度對(duì)從動(dòng)件振動(dòng)的影響。

在凸輪運(yùn)動(dòng)曲線(xiàn)中,加速度的變化率通常定義為躍度,表示從動(dòng)件系統(tǒng)慣性力的變化率。減少最大躍度,尤其使行程終點(diǎn)的躍度盡量降低,將有利于提高系統(tǒng)的工作平穩(wěn)性。躍度曲線(xiàn)連續(xù)的運(yùn)動(dòng)規(guī)律有利于振動(dòng)抑制,目前凸輪機(jī)構(gòu)運(yùn)動(dòng)設(shè)計(jì)上所采用的運(yùn)動(dòng)規(guī)律,加速度的變化率即躍度,其曲線(xiàn)是不連續(xù),從而使配套織機(jī)轉(zhuǎn)速受到一定的限制,所以不能達(dá)到真正意義上的高速運(yùn)動(dòng)。高速時(shí)傳動(dòng)振動(dòng)大,容易導(dǎo)致電子提花機(jī)上的電磁閥產(chǎn)生誤動(dòng)作,為了防止產(chǎn)生誤動(dòng)作,應(yīng)采用提高加工工藝精度來(lái)解決,但成本高昂。
3 連桿開(kāi)口機(jī)構(gòu)的設(shè)計(jì)研究
3.1 連桿機(jī)構(gòu)的優(yōu)點(diǎn)
(1)連桿機(jī)構(gòu)能夠?qū)崿F(xiàn)多種運(yùn)動(dòng)形式的轉(zhuǎn)換。例如,它可以將原動(dòng)件的轉(zhuǎn)動(dòng)轉(zhuǎn)變?yōu)閺膭?dòng)件的轉(zhuǎn)動(dòng)、往復(fù)移動(dòng)或擺動(dòng),反之也可將往復(fù)移動(dòng)或擺動(dòng)轉(zhuǎn)變?yōu)檫B續(xù)的轉(zhuǎn)動(dòng)。
(2)它的運(yùn)動(dòng)副一般均為低副,其元素之間為面接觸,傳動(dòng)時(shí)單位接觸面積所受壓力較小,且面接觸便于潤(rùn)滑,故磨損也相應(yīng)減少,壽命較長(zhǎng)。另外,由于運(yùn)動(dòng)副元素為圓柱面或平面,易于加工、安裝、調(diào)整和維修,并能保證精度要求,且因各構(gòu)件之間為面接觸而壓強(qiáng)小,便于潤(rùn)滑,承載能力大。而且其低副元素的接觸是依靠本身的幾何約束來(lái)保證的,不需要附加諸如彈簧之類(lèi)的零件便能保證其接觸。
(3)連桿機(jī)構(gòu)還有增力和擴(kuò)大行程的作用,若接長(zhǎng)連桿,則能控制較遠(yuǎn)距離的某些動(dòng)作。
(4)連桿機(jī)構(gòu)中的連桿是作復(fù)雜平面運(yùn)動(dòng)的構(gòu)件,因而其上各點(diǎn)可以描繪出不同形狀的曲線(xiàn)軌跡,當(dāng)主動(dòng)件的運(yùn)動(dòng)規(guī)律不變時(shí),每一機(jī)構(gòu)中構(gòu)件的相對(duì)長(zhǎng)度有所改變,則可使從動(dòng)件得到多種不同的運(yùn)動(dòng)規(guī)律。
3.2 連桿開(kāi)口機(jī)構(gòu)的原理
如圖10所示,這種新型電子提花機(jī)的開(kāi)口機(jī)構(gòu),包含由曲柄AB、連桿BC、搖桿CD構(gòu)成的曲柄搖桿機(jī)構(gòu)(第一部分),由搖桿DE、連桿EF、提刀刀架和提刀構(gòu)成的搖桿滑塊機(jī)構(gòu)(第二部分),以及由搖桿DI、連桿IJ和搖桿JK構(gòu)成的雙搖桿機(jī)構(gòu)(第三部分),和由搖桿KL、連桿LM、提刀刀架和提刀構(gòu)成的搖桿滑塊機(jī)構(gòu)(第四部分)。其中由M、N和G、F組成的機(jī)構(gòu)就是提刀的刀架,而Q和H就是兩把在滑槽里上下運(yùn)動(dòng)的提刀。
3.3 連桿開(kāi)口機(jī)構(gòu)的運(yùn)動(dòng)分析
運(yùn)用解析法來(lái)求得機(jī)構(gòu)的位置、速度和加速度以及躍度。所謂解析法一般是先建立機(jī)構(gòu)的位置方程,然后將位置方程對(duì)時(shí)間求導(dǎo),得到速度方程;再將速度方程對(duì)時(shí)間求導(dǎo),得到加速度方程;最后將加速度方程對(duì)時(shí)間求導(dǎo),得到躍度方程。由于所用的數(shù)1學(xué)工具不同,解析的方法也不同,下面所用的是一種較簡(jiǎn)單的方法即復(fù)數(shù)矢量法。所謂復(fù)數(shù)矢量法就是將機(jī)構(gòu)看成一封閉矢量多邊形,并用復(fù)數(shù)形式表示該機(jī)構(gòu)的封閉矢量方程式,再將矢量方程式分別對(duì)所建立的直角坐標(biāo)系取投影。

圖10 新型電子提花機(jī)開(kāi)口機(jī)構(gòu)的原理圖
通過(guò)使用Microsoft Visual Studio 2008軟件的分析,具體運(yùn)動(dòng)曲線(xiàn)如圖11~14所示。
由圖11~14所示,連桿開(kāi)口機(jī)構(gòu)中提刀的位移、速度、加速度和躍度曲線(xiàn)都是連續(xù)且不跳躍的,可以通過(guò)調(diào)整來(lái)保證H提刀、Q提刀運(yùn)動(dòng)規(guī)律是同步的。連桿機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)單,運(yùn)動(dòng)曲線(xiàn)光整平滑、連續(xù),也沒(méi)有停頓時(shí)間,躍度(加速度的導(dǎo)數(shù))曲線(xiàn)也不跳躍,所以可以適應(yīng)高速運(yùn)動(dòng)運(yùn)轉(zhuǎn),從而說(shuō)明提刀的運(yùn)動(dòng)性能是能夠滿(mǎn)足高速運(yùn)動(dòng)規(guī)律的要求,也說(shuō)明該連桿機(jī)構(gòu)的開(kāi)口機(jī)構(gòu)可以滿(mǎn)足提花機(jī)高速運(yùn)轉(zhuǎn)。
4 連桿開(kāi)口機(jī)構(gòu)與凸輪開(kāi)口機(jī)構(gòu)的對(duì)比
4.1 提刀位移的比較
圖15是由圖4和圖11合并在一起的提刀位移曲線(xiàn)比較圖,其中凸輪開(kāi)口機(jī)構(gòu)與連桿開(kāi)口機(jī)構(gòu)的主動(dòng)件轉(zhuǎn)速(都是織機(jī)主軸轉(zhuǎn)速1 000 r/min的一半)是一樣大小,且均為勻速,轉(zhuǎn)速都為500 r/min。圖中顯示的公共區(qū)域是經(jīng)紗被提起的一定開(kāi)口量,該開(kāi)口量的大小(劍桿、片梭等載體引緯紗所穿過(guò)經(jīng)紗時(shí)的有效高度)和時(shí)間(所對(duì)應(yīng)織機(jī)主軸轉(zhuǎn)過(guò)的角度)是由具體的工藝來(lái)確定的。為了更有效地對(duì)比兩種開(kāi)口機(jī)構(gòu),采用完全相同的開(kāi)口量和織機(jī)主軸轉(zhuǎn)速。
4.2 提刀速度的比較
由圖5(凸輪機(jī)構(gòu)中提刀的速度)和圖12(連桿機(jī)構(gòu)中提刀的速度)相比,連桿機(jī)構(gòu)中最大提刀速度為2 079 mm/s,而凸輪機(jī)構(gòu)中最大提刀速度為7 141 mm/s,所以連桿機(jī)構(gòu)中提刀速度是比凸輪機(jī)構(gòu)中提

圖11 連桿開(kāi)口機(jī)構(gòu)中提刀的位移曲線(xiàn)圖
圖12 連桿開(kāi)口機(jī)構(gòu)中提刀的速度曲線(xiàn)圖

圖13 連桿開(kāi)口機(jī)構(gòu)中提刀的加速度曲線(xiàn)圖
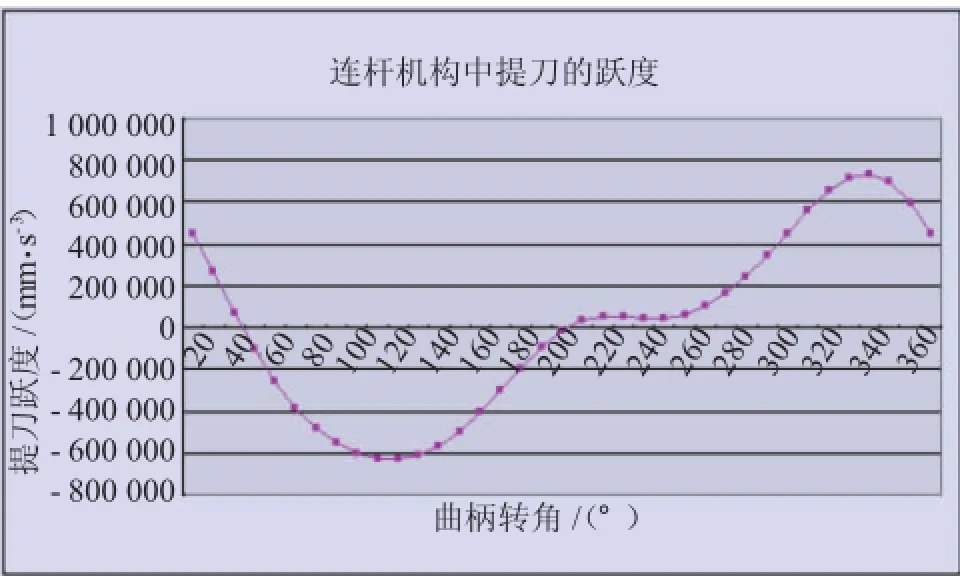
圖14 連桿開(kāi)口機(jī)構(gòu)中提刀的躍度曲線(xiàn)圖
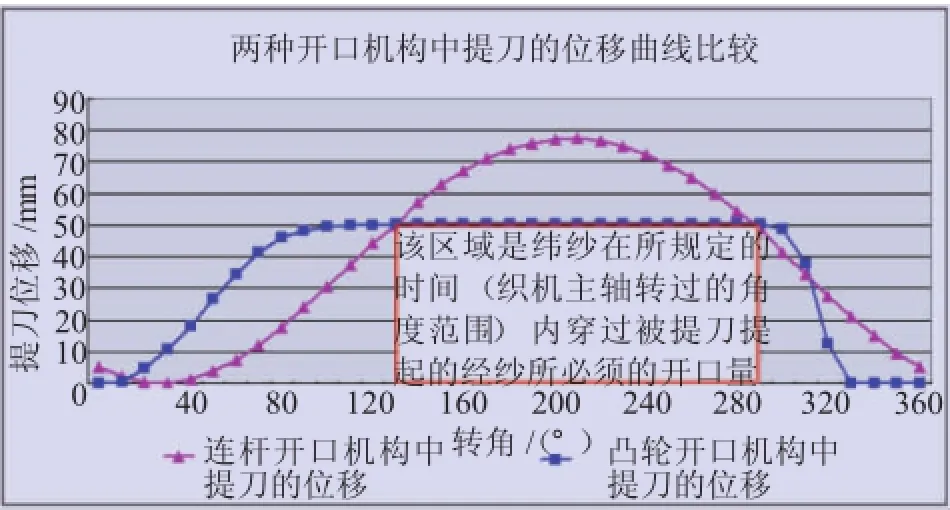
圖15 兩種開(kāi)口機(jī)構(gòu)的位移曲線(xiàn)比較圖
刀速度要小。
4.3 提刀加速度的比較
由圖6(凸輪機(jī)構(gòu)中提刀的加速度)和圖13(連桿機(jī)構(gòu)中提刀的加速度)相比,連桿機(jī)構(gòu)中最大提刀加速度為128 102.5 mm/s2,而凸輪機(jī)構(gòu)中最大加速度為2 616 145.7 mm/s2,且凸輪機(jī)構(gòu)中提刀的加速度曲線(xiàn)是不連續(xù)的,所以連桿機(jī)構(gòu)中提刀加速度是比凸輪機(jī)構(gòu)中提刀加速度要小。
4.4 提刀躍度的比較
由圖7(凸輪機(jī)構(gòu)中提刀的躍度)和圖14(連桿機(jī)構(gòu)中提刀的躍度)相比,連桿機(jī)構(gòu)中最大提刀躍度為7 327 250 mm/s3,而凸輪機(jī)構(gòu)中最大躍度為761 427 680 mm/s3,且凸輪機(jī)構(gòu)中提刀的躍度曲線(xiàn)是不連續(xù)的,所以連桿機(jī)構(gòu)中提刀躍度是比凸輪機(jī)構(gòu)中提刀躍度要小。
4.5 兩種開(kāi)口機(jī)構(gòu)提刀比較的結(jié)論
為了滿(mǎn)足工藝要求并保證所必須的一定開(kāi)口量,在相同的主動(dòng)件轉(zhuǎn)速(都是織機(jī)主軸轉(zhuǎn)速的一半)條件下,凸輪開(kāi)口機(jī)構(gòu)提刀和連桿機(jī)構(gòu)提刀分別按照?qǐng)D15的位移曲線(xiàn)進(jìn)行運(yùn)動(dòng),經(jīng)過(guò)對(duì)其速度、加速度和躍度的對(duì)比,連桿開(kāi)口機(jī)構(gòu)的提刀運(yùn)動(dòng)性能都比凸輪開(kāi)口機(jī)構(gòu)的提刀運(yùn)動(dòng)性能優(yōu)越。由凸輪機(jī)構(gòu)傳動(dòng)的提花機(jī)開(kāi)口機(jī)構(gòu),由于開(kāi)口有較長(zhǎng)的停頓時(shí)間,在滿(mǎn)開(kāi)時(shí)其躍度曲線(xiàn)(亦稱(chēng)振動(dòng)曲線(xiàn))有突變、不連續(xù),所以高速運(yùn)轉(zhuǎn)時(shí)會(huì)產(chǎn)生一定的振動(dòng),從而使配套織機(jī)轉(zhuǎn)速受到了一定的限制。而由連桿機(jī)構(gòu)傳動(dòng)的提花機(jī)開(kāi)口機(jī)構(gòu),由于在提綜開(kāi)口最高位置沒(méi)有停頓時(shí)間,其躍度曲線(xiàn)(亦稱(chēng)振動(dòng)曲線(xiàn))是連續(xù)變化的,所以運(yùn)動(dòng)平衡,能適應(yīng)高速運(yùn)轉(zhuǎn)。并且從以上對(duì)兩種機(jī)構(gòu)的對(duì)比可以得出,連桿機(jī)構(gòu)中提刀的速度、加速度和躍度比凸輪機(jī)構(gòu)中提刀的速度、加速度和躍度是都要小。
綜上所述,從運(yùn)動(dòng)平穩(wěn)、振動(dòng)小、能適應(yīng)高速方面來(lái)說(shuō),選用連桿開(kāi)口機(jī)構(gòu)比目前凸輪開(kāi)口機(jī)構(gòu)更合適,更能滿(mǎn)足高速運(yùn)轉(zhuǎn)的運(yùn)動(dòng)。
5 結(jié)束語(yǔ)
筆者研究了高速提花機(jī)的傳動(dòng)機(jī)構(gòu),提出了以連桿機(jī)構(gòu)替代凸輪機(jī)構(gòu)來(lái)實(shí)行高速運(yùn)動(dòng),并論證連桿機(jī)構(gòu)的躍度曲線(xiàn)(加速度的導(dǎo)數(shù))是連續(xù)的,是可以滿(mǎn)足高速運(yùn)動(dòng)的。
[1]蔣高明.現(xiàn)代經(jīng)編工藝與設(shè)備[M].北京:中國(guó)紡織出版社,2004.
[2]李志祥.電子提花技術(shù)與產(chǎn)品開(kāi)發(fā)[M].北京:中國(guó)紡織出版社,2000.153-178.
[3]溫倩,趙利明.試論國(guó)產(chǎn)提花機(jī)的技術(shù)改造及發(fā)展方向[J].棉紡織技術(shù),2003(10):50-52
[4]梁新華.平面連桿機(jī)構(gòu)的模糊綜合與模糊優(yōu)化[D].昆明:昆明理工大學(xué),2002.
[5]鄭文緯,吳克堅(jiān).機(jī)械原理[M].第7版.北京:高等教育出版社,1997.
According to the operational principle of jacquard machine and forming theory of the woven fabric,it points out that shedding mechanism of the jacquard machine is one of the main mechanisms in primary motion with an emphasis on the role of the shedding mechanism.By an analyses on the regular pattern of the movements involving the displacement curve,velocity curve,acceleration curve and jump curves of the cutter in current cam-type shedding mechanism,we try to explore the shortcoming and reasons causing the cam-type shedding mechanism fails to satisfy high-speed operation.And put forward an alternative shedding mechanismshedding mechanism with linkage assembly while the conditions of same loom spindle speed and same amount of shedding are satisfied.The established motion model for the combined link-rod mechanism adopts complex vector analysis tocalculate the regular pattern of the variations of displacement curve,velocity curve,acceleration curve and saltus curve ofthe cutter in the sheddingmechanismwith linkage assembly.With a comparative analysis of the regular patterns between its motion and the motion of cam-type shedding mechanism.Finally we obtain the conclusion that the shedding mechanism with link-rod assembly can satisfy high-speed operation and decide to replace the transmission mechanism of the cam-type shedding mechanism with the shedding mechanism with linkage assembly.
提花機(jī);傳動(dòng)機(jī)構(gòu);連桿機(jī)構(gòu)
Jacquard Machine;Transmission Mechanism;Linkage Assembly

TH133.2
A
1672-0555(2015)04-052-09
2015年8月
楊軍(1979-),男,工程碩士,工程師,主要從事產(chǎn)品質(zhì)量管理與產(chǎn)品設(shè)計(jì)工作