雷達數據處理中的虛假航跡綜合抑制技術
2015-08-10 05:23:44戴霄
艦船電子對抗 2015年6期
戴 霄
(中國船舶重工集團公司第723研究所,揚州225001)
0 引 言
虛假航跡是由非真實目標的雷達量測數據(雜波、干擾等)建立的虛假的、錯誤的目標航跡。在作戰指揮時,如果態勢中存在大量的虛假航跡,必然會給指揮員的作戰決策帶來嚴重的干擾。因此對于任何一個探測系統來說,所產生的虛假航跡越少越好。但目前,由于探測環境日益復雜,且存在很多有源、無源干擾,雷達為了能夠盡早發現散射面積日益減小的作戰平臺,導致探測數據中不可避免會混雜部分雜波或干擾數據。當雜波密度過大時,僅單純使用現有的航跡起始算法[1-5]常常會建立較多的虛假航跡。
航跡起始算法中判斷哪些不同周期的點跡是來自同一目標的問題是個純粹的概率問題,因此從理論上來說無論采取何種起始算法,在一些雜波較為集中的區域仍會在一定概率上建立一些虛假航跡,如圖1所示。而我們的研究工作是盡可能降低該概率值,盡量減少虛假航跡的數量;另外,即使建立了虛假航跡,也必須盡可能縮短其生命周期,減少其在態勢中存在的時間。
1 虛假航跡評估方法
在文獻[6]中,作者認為信息融合能力主要體現為3個字:快、準、穩。其中“準”是指融合態勢與真實態勢相一致,該一致性決定了作戰指揮員可在多大程度上相信融合態勢,這種概念同樣可適用于雷達數據處理系統。而在與“準”相關的所有指標中,正確航跡率是反映正確航跡多少(同樣也反映了虛假航跡多少)的一個重要指標。
1.1 正確航跡率
正確航跡率是指雷達態勢中正確航跡占航跡總數的比例。設在t時刻,雷達態勢中正確航跡數為Qdc(t),航跡總數為Qd(t),雷達態勢在t時刻的正確航跡率ρdc(t)為:
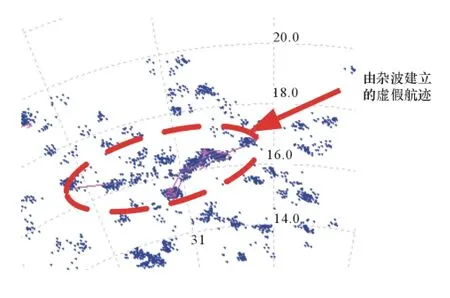
圖1 某型雷達實測數據航跡處理后的虛假航跡

在 [tb,te]時間段內,正確航跡率ρ為:

正確航跡率能夠從側面如實反映一段時間對虛假航跡的抑制水平。但在通常的實際應用中,雷達探測區域內真實的目標個數是非常有限的,而雜波和干擾卻相對較多,建立的所有航跡中絕大多數都是虛假航跡(即Qdc(t)?Qd(t)),因此即使通過各種技術手段有效抑制了虛假航跡的產生,但可能體現在正確航跡率數值上的變化卻并不直觀。為了方便工程應用,本文提出了單位時間虛假航跡數、虛假航跡平均維持周期2個指標,能夠更直觀地綜合評估一段時間內對虛假航跡抑制的能力。
1.2 單位時間虛假航跡數
設在 [tb,te]時間段內,共建立航跡m條,分別為Tr1,Tr2,Tr3,...,Trm,假設前n(n≤m)條為虛假航跡,則單位時間的虛假航跡數為:

2 虛假航跡綜合抑制方法
1.3 虛假航跡平均維持周期
設上述的n條虛假航跡的維持時間(航跡從建立到撤銷的時間差)分別為t1,t2,t3...tn,則虛假航跡平均維持周期為:
在航跡處理中,要達到在保證真實目標順利起始的同時有效抑制虛假航跡產生的目的,僅依靠某單一方法是非常困難的,需要多種方法綜合處理。通過對大量的實測數據進行分析發現,絕大多數的虛假航跡具有以下2個特點:
(1)航跡擬合誤差較高;
(2)航跡維持時間較短。
因此本文針對上述的虛假航跡特點,從航跡起始門限選擇、雷達原始量測數據分析、航跡全生命周期的質量管理等多個環節出發,共同解決虛假航跡抑制問題。
2.1 基于殘差門限的虛假航跡判別方法
無論采用何種航跡起始算法(如Hough變換法、邏輯法等),最終在航跡起始前均會挑選出來自相鄰多個周期的點跡,構成一個點跡序列,稱其為點跡初始相關序列[7]。若在某一時刻,航跡處理算法已建立了多個點跡初始相關序列,那后續的工作就是如何評判這些序列的質量,從中選擇出可以被認為是來自一個真實目標的序列。
圖2展示的是2個不同的初始序列(序列A和序列B),顯而易見序列A的質量要明顯高于序列B(通俗的說就是序列A比序列B更像是來自一個真實目標)。因此,基于這種樸素的思想,對初始相關序列引入了殘差的概念。
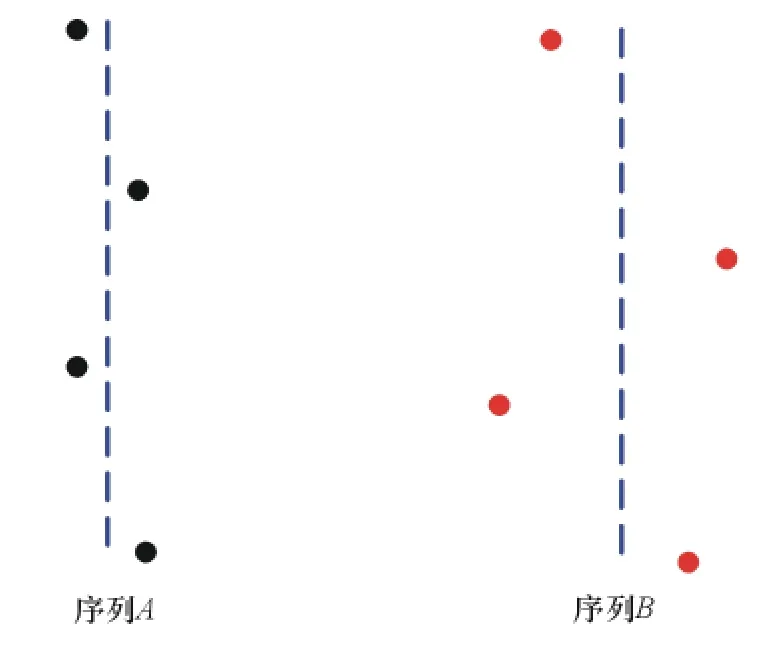
圖2 不同初始相關序列的比較
2.1.1 初始相關序列殘差
設一初始相關序列為 (p1,p2..,pN),令^pi為pi的濾波值,vi=^pi-pi為該相關序列中第i點的殘差,而相關序列的殘差用E表示,計算公式如下:

通常航跡處理算法在直角坐標系下進行,因此在實際應用時可分別計算序列在直角坐標系各分量上的殘差值。
2.1.2 殘差門限
雷達量測信息是極坐標系下獲取的,其距離、方位探測精度分別為σr、σa(假設為兩坐標雷達),因此為了計算方便,需將雷達在距離/方位上的探測精度變換至直角坐標系中,(σx,σy),則計算公式如下:

式中:R為距離量測值;A為方位量測值。
直角坐標系下,各坐標分量的殘差門限分別為κσx和κσy(通常情況下κ取值為3)。
2.1.3 門限比較
當殘差門限計算完成后,則可以將該序列的殘差與門限進行比較,若小于門限,則起始一條航跡,若大于門限,則舍棄該序列。具體準則如下:
如Ex≤κσx且Ey≤κσy,則航跡起始;
如Ex>κσx或Ey>κσy,則序列舍棄。
采用該方法就能保證在起始初期剔除一些雖然相關成功,但質量較差的虛假航跡。
2.2 基于雜波區域自動識別的虛假航跡抑制技術
當雷達正常工作時,其實可以從雷達PPI顯示界面上非常直觀地分辨出哪些區域是雜波區(如圖3所示,可以明顯看出圖中圓圈內的區域為雜波區),幾乎所有的虛假航跡均來自這些雜波區域。
一個非常直觀的想法,即是否可以通過某些技術使得計算機能夠近似具備人的思維,自動識別出可能的雜波區域,從而設法抑制虛假航跡。
基于這個思想,提出了基于雜波區域自動識別的虛假航跡抑制技術。具體思路為:將雷達探測區域按照距離、方位進行網格劃分(如圖4所示,具體網格單元大小可根據雷達實際工作參數確定)。從首次接收雷達點跡數據開始,采用滑窗法(最近幾個周期)實時統計、計算以下5個統計量:
(1)每個周期平均點跡總數S1;
(2)每個網格落入的點跡數S2;
(3)有點跡落入的網格數S3;
(4)根據S1和S3求取的網格平均點跡數S4;
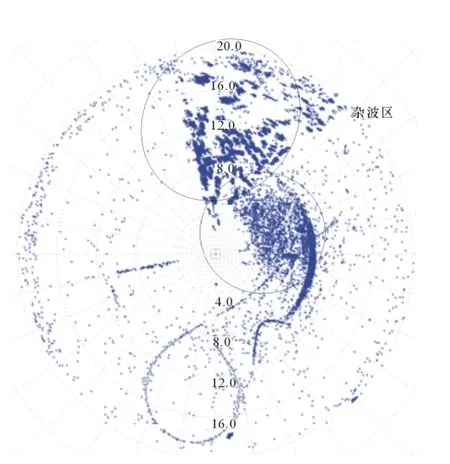
圖3 雷達探測區域內的雜波區
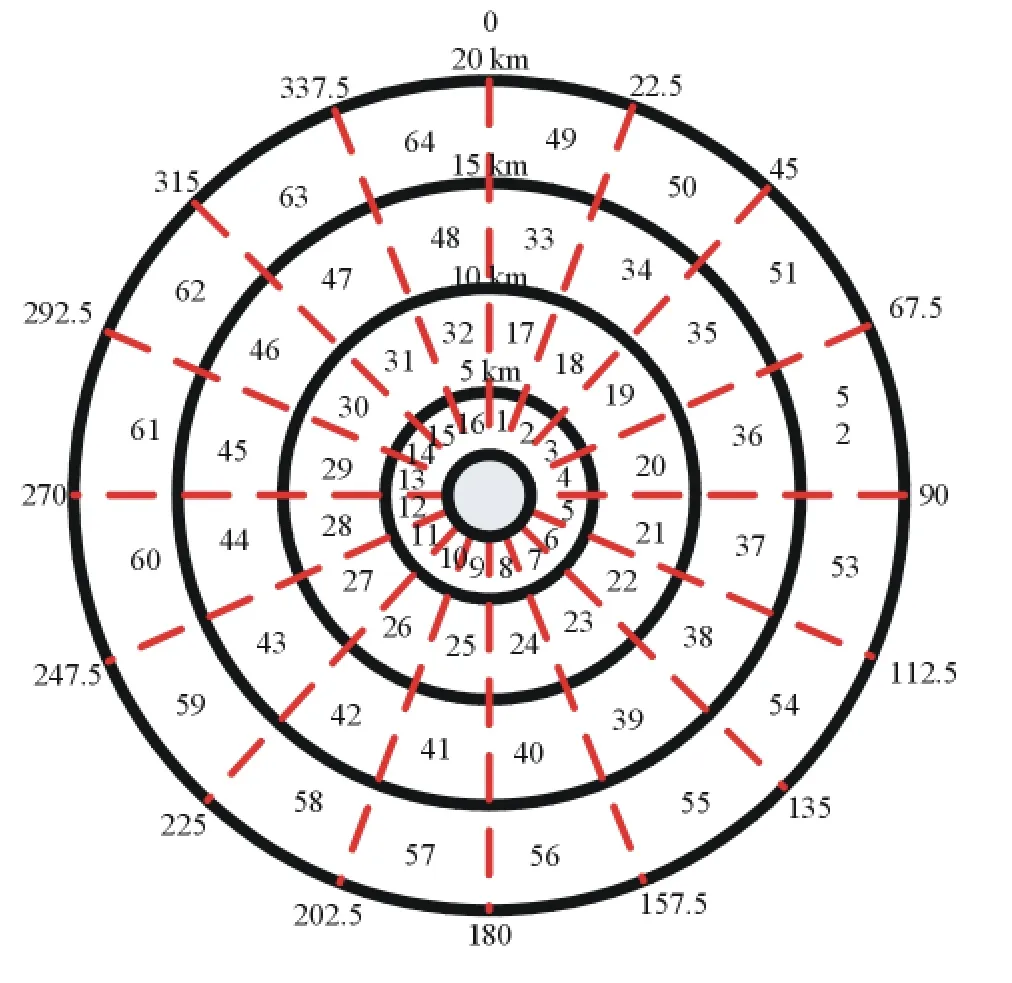
圖4 當雷達量程為20km時的網格劃分示意圖
(5)每個網格內被舍棄的初始相關序列個數S5。
通過對上述前4個統計量的比較分析,分辨出點跡數量明顯異常的區域并置上標識,再依據S5自動識別出可能的雜波區域,然后根據雜波分布的強弱將所有網格區域分為:非雜波區、弱雜波區、中雜波區、強雜波區4個等級。對非雜波區采用正常的航跡起始算法,并可適當放寬航跡殘差門限及參與航跡起始的點跡個數,以縮短反應時間;對弱、中、強3種雜波區域,逐級提高航跡的殘差門限,降低新建航跡的質量,并適當增加航跡的積累點數,以減少最終確認航跡中虛假航跡的數量。
2.3 基于關聯概率的航跡質量優化管理方法
航跡質量管理是航跡管理的重要組成部分[8]。通過航跡質量管理,可及時、準確地對航跡進行起始或撤銷。在實際工程應用中,通常采用打分法對航跡質量進行更新。其計算公式為:

式中:λ為航跡質量增加項;γ為航跡質量降低項。
其基本思想為:當本周期航跡存在相關點跡時,航跡質量加1(當相關波門存在大中小之分時,可根據相關波門的大小對增加值進一步細分);若航跡在本周期無相關點跡時,則航跡質量減1。當航跡質量小于確認航跡門限而大于0時,則為暫時航跡;當航跡質量大于確認航跡門限時,則從暫時航跡升為確認航跡;若航跡質量等于0時,則航跡撤銷。
在實際使用中,打分法簡單實用,能夠很好地對航跡進行管理。但是現有的打分準則相對比較粗糙,并沒有考慮點跡與航跡的互聯概率的大小。如圖5所示,顯然航跡A的相關點位置要遠比航跡B的相關點的位置更好,但對于質量管理來說,2個航跡的質量均會增加相同的值,這顯然并不合理。
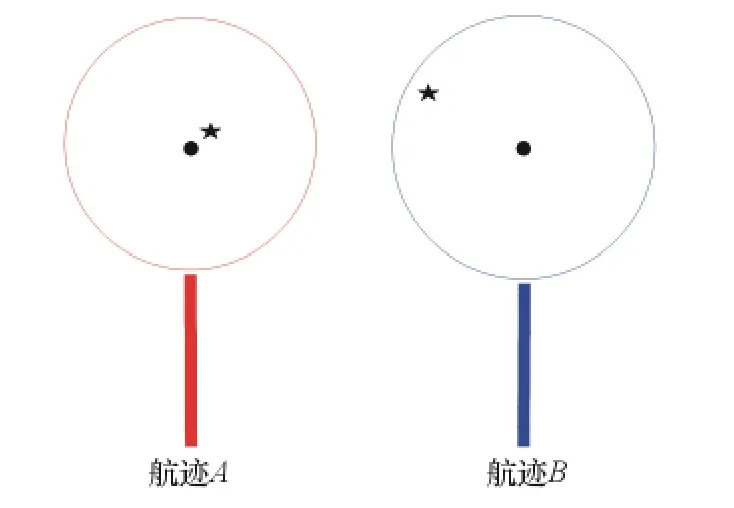
圖5 航跡與點跡相關比較
假設相關點跡服從正態分布,即相關概率為:
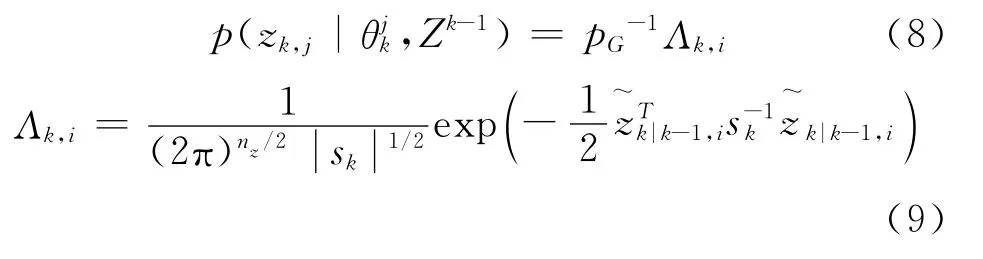
因此,本文提出了基于關聯概率p(0<p≤1)的航跡質量優化管理方法,以相關概率值代替原打分法中的航跡質量增加值;而當航跡沒有相關點時,航跡質量減小常數γ(通常γ取值為0.5)。
采用本方法將使得那些相關概率一直較高(p>0.5)的航跡質量增加較快,而當航跡沒有相關點時(發生丟點現象),航跡質量緩慢下降,提高其生存周期;而那些相關概率較低的航跡質量增加較慢,增加了積累點數,有效抑制了虛假航跡的產生,并且當沒有相關點時,航跡質量快速下降,降低了其生存周期。
2.4 3種方法的綜合應用
在工程中將上述3種方法綜合應用,以達到虛假航跡抑制的目的,具體流程如圖6所示。
3 實測數據驗證
針對上述技術,將采用某雷達的實裝數據進行驗證,并采用第2節中介紹的評估方法對虛假航跡抑制水平進行評估,以證明技術的有效性。
該雷達實測數據時間長度為222.9s,在探測區域內有1架飛機,雷達原始量測數據見圖3。圖7~圖10分別給出了采用上述虛假目標抑制技術前后的航跡處理結果。
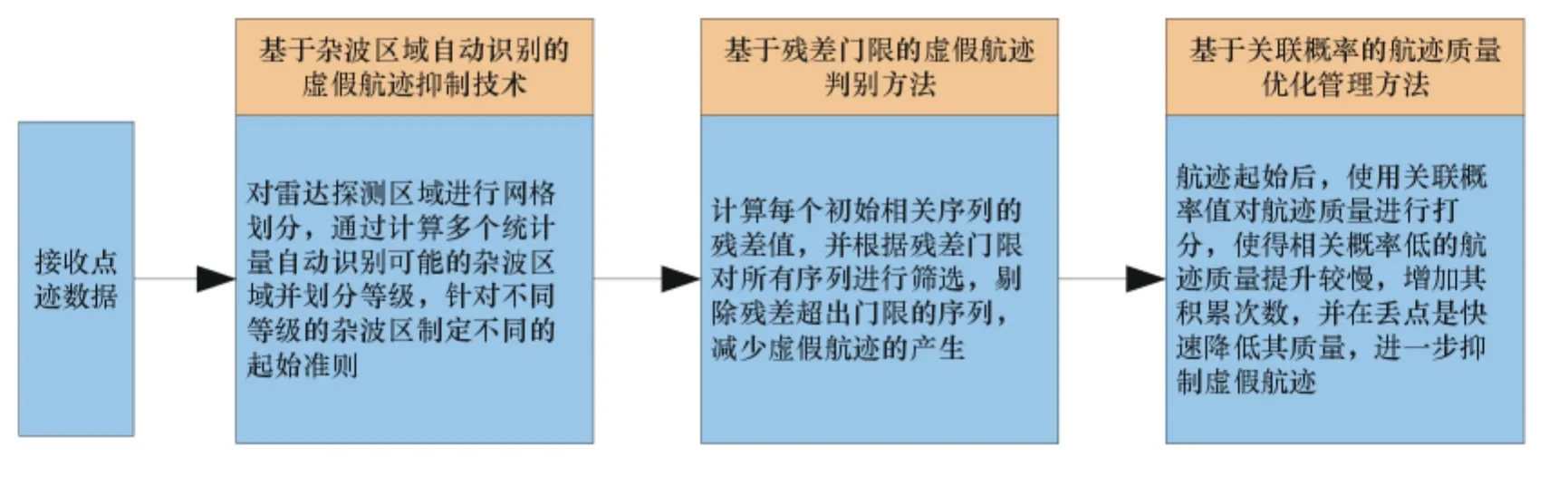
圖6 多種方法綜合利用流程圖
沒有采用虛假航跡抑制技術前共建立航跡65批,其中真實航跡2批,虛假航跡63批,所有虛假航跡的維持時間為4 213.4s。

圖7 沒采用虛假航跡抑制技術前的航跡處理結果圖

圖8 沒采用虛假航跡抑制技術前的航跡列表
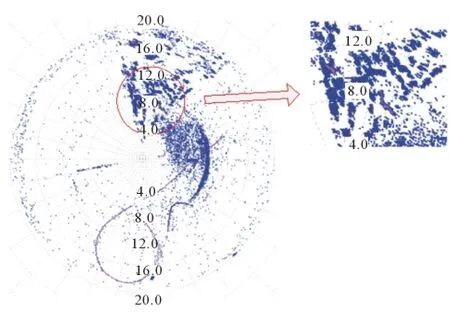
圖9 采用虛假航跡抑制技術后的航跡處理結果圖
采用虛假航跡抑制技術后共建立航跡12批,其中真實航跡2批,虛假航跡10批,所有虛假航跡的維持時間共為587.3s。
具體結果比較如表1所示。

表1 采用前后指標比較
4 總結與展望
虛假航跡抑制是航跡處理中永恒的難題,既要保證真實目標順利起始,又要抑制所有可能的虛假航跡,這兩者是相互矛盾的,因此留下的發揮空間非常有限。而且該問題并不是一個科學問題,更多的是個工程問題,雖然很多人都認識到問題的重要性,但真正提出有效解決辦法的并不多見。因此,本文專門針對該問題闡述了一些工程上的研究成果和實踐經驗,首先提出了用于評估虛假航跡抑制水平的2個指標,并給出計算方法,隨后介紹了3種虛假航跡抑制方法,并對這3種方法進行綜合應用,有效地減少了虛假航跡的數量,降低了虛假航跡平均維持時間。最后通過實測數據驗證表明,本文提出的方法是有效的。

圖10 采用虛假航跡抑制技術后的航跡列表
由于在雷達數據處理階段可以利用的信息量太少,導致很難從根本上解決虛假航跡多的問題。目前,很多雷達除了能夠提供目標的位置信息外,還可以提供幅度、距離/方位擴展、信噪比、多普勒頻率等特征信息[9]。信息量的增加必然會給航跡處理帶來一些額外的好處(可抑制虛假航跡、提高跟蹤精度、減少斷航等),但這些信息的有效利用還需要對大量的實測數據(不同環境、不同目標)進行分析、歸納和總結,重新梳理航跡處理的思路和算法流程,這是目前比較重要的研究方向之一,需要持續關注。
[1]董志榮.論航跡起始方法[J].情報指揮控制與仿真技術,1999(2):1-7.
[2]Barshalom Y,Fortmann T E.Tracking and Data Assosiation[M].Boston:Academic Press,1998.
[3]孫強,惠曉濱,郭璐,黃鶯.一種基于修正的Hough變換的航跡起始算法[J],航空計算技術,2011,41(2):10-12.
[4]劉昇,盧廣山,張曉鴻,陳洪亮.密集雜波環境下邏輯起始算法研究[J].電光與控制,2012,19(1):34-37.
[5]周建中,王樹宗,占明鋒.基于一步延時的航跡起始改進算法[J].海軍工程大學學報,2010,22(1):107-112.
[6]鄒偉,劉兵,孫倩,等.多源信息融合能力評估關鍵技術綜述[J].計算機與數字工程,2010(3):1-6.
[7]何佳洲,彭思鵬,敬忠良,等.數據初始互聯的自適應有限記憶法[J].光電工程,2010,37(9):1-7.
[8]何友,修建娟,張晶煒,關欣,等.雷達數據處理技術[M].第1版.北京:電子工業出版社,2006.
[9]包陽.情報雷達中的虛警抑制[D].南京:南京理工大學,2010.
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
汽車觀察(2016年3期)2016-02-28 13:16:26
電測與儀表(2015年5期)2015-04-09 11:30:52
