兩棲車輛水上快速性設計研究
2015-07-01 07:49:24鄭翔玉房凌暉
兵器裝備工程學報 2015年11期
關鍵詞:設計
鄭翔玉,房凌暉,王 琛,吳 剛
(陸軍軍官學院,合肥 230031)
為了應對當前復雜的國內外形勢,我國進行兩棲作戰的概率大幅度提高。兩棲登陸作戰階段主要采用兩棲車輛作為主戰裝備,因此對兩棲車輛的戰場生存能力有了更高的要求[1]。水上行駛的快速性是影響兩棲車輛生存能力的重要因素,也就成為目前國內外兩棲裝備研究的熱點領域[2-3]。
兩棲車輛的突出優勢在于:在水上和陸上行駛時都具有較高的機動性能、在水上行駛時不易被發現,同時能過快速通過水陸交界處。為了提高兩棲車輛水上行駛的快速性,目前有很多種途徑可以實現,本研究著重從減阻增速方面進行探討和研究,為兩棲車輛的設計和改進提供參考。
1 兩棲車輛水上阻力分析
影響兩棲車輛水上快速性的因素比較多,比如航行阻力、推進器效率和發動機輸出功率等[4-10]。目前,提高兩棲車輛機動性的研究主要集中在發動機技術上,通過提高發動機的功率來達到增速的目的。如果一味地增大發動機功率,就是使裝甲裝備的體積和質量不斷增大,使武器系統的整體效能達到極限狀態。根據試驗測定,兩棲車輛在水上以速度v 行駛時,功率P=f(v3),而阻力F=f(v2),因此本文通過減阻增速的途徑來提高兩棲車輛的水上快速性。
“減阻增速”技術是通過減小兩棲車輛的航行阻力來提高其水上快速性。水上行駛速度是影響兩棲車輛航行阻力的首要因素。航行阻力隨航行速度的增加而快速增長。其次車型和附件。因為兩棲車基于陸地行駛需要所具有的特定外形和行駛裝置,極其嚴重地制約其水上航行速度的提高。兩棲車輛為了兼顧水上和陸上行駛性能,致使與船舶的外形有較大的差異,不僅長度短、流線型差,而且突出部件較多,比如車輪、平衡肘和懸掛系統等行動裝置。
參照船舶領域阻力分類方法和前人慣用的分類方法,兩棲車輛在水中行駛的總阻力可以分為空氣阻力、黏性阻力和興波阻力3 大部分,其中黏性阻力包括形狀阻力和摩擦阻力,根據統計資料表明:摩擦阻力所占比重很小,約占5% ~10%,形狀阻力所占比重很大,約占80% ~70%,興波阻力所占比重較大,約占15% ~20%。
因此“減阻”的主要任務是減小行動裝置突出部位的阻力。對于輪式車輛來說,當車輛在水中行駛時,將車輪盡可能收起至水面以上,減小形體阻力; 當車輛駛入水陸交界處時,放下車輪,恢復車輛的陸地行駛功能。
2 兩棲車輛車輪收放設計
設計車輪收放方案時應綜合考慮車輛的陸上和水上行駛功能,盡可能減小對陸上行駛功能的影響,使車輛在水中能夠平穩快捷地收起車輪,在陸上能夠安全有效地行駛。
2.1 結構分析
兩棲車輛車輪的收放是通過轉動平衡肘來實現的。車輪收放方法有多種。從收放順序上可以分為分階段收放和平衡肘齊轉同時收放。分階段收放方案控制方案復雜,同時調平方案有利于車輛的整體穩定性、控制方便、結構簡單。本設計選擇了同時調平方案。如圖1 所示,兩棲車輛每側的3 個平衡肘分別通過固定桿與杠桿聯接在一起,這樣只要通過電機帶動一個平衡肘繞上軸轉動,車輛一側的平衡肘就能同時轉動,實現車輪的收放。
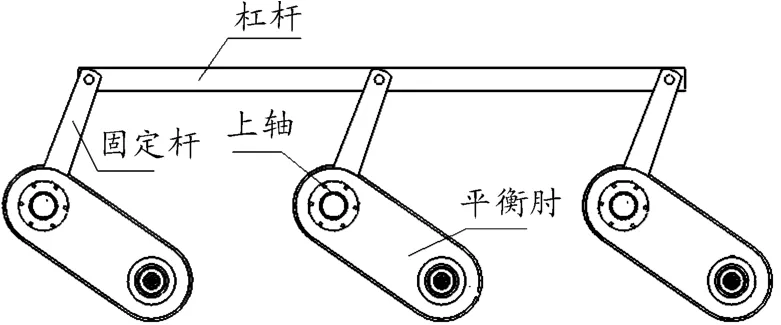
圖1 平衡肘連接示意圖
平衡肘升降機構是以電機為動力源,通過平衡肘的旋轉達到平衡肘的升降。在提升的過程中,不能影響到原有動力的傳遞,這樣才可以實現在不中斷動力的前提下,完成平衡肘的快速升降。動力輸出時,由發動機經一級變速傳遞到變速箱,再經傳動軸到平衡肘內,利用肘內動力傳動,驅動車輪旋轉。考慮到平衡肘上軸通過軸承座與車輛底盤固定,在設計該升降機構時,通過轉動平衡肘上軸,就可以實現平衡肘的轉動。平衡肘升降機構動力方式采用電機驅動,通過傳動機構實現動力傳動方式的轉變,從而達到驅動升降機構,實現平衡肘升降的目的。平衡肘升降機構的分析示意圖如圖2所示。
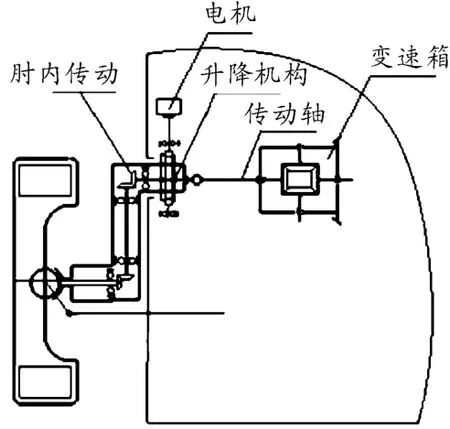
圖2 收放車輪機構的分析示意圖
2.2 傳動方式選擇
由于電機的動力以旋轉運動的方式輸出,而平衡肘的升降也是通過旋轉平衡肘來實現的。因此在設計中,通過中間加一傳動機構就可實現動力的平穩傳遞。利用電機驅動來實現平衡肘轉動的傳動方式有很多種,如滾珠絲杠方式和蝸輪蝸桿方式等。在兩棲車輛的設計中,要求升降機構完成動作后能夠自鎖。蝸輪蝸桿的傳動方式具有傳動比大、工作較平穩、噪聲低、結構緊湊、可以自鎖等優點,因此平衡肘升降的動力傳遞就采用蝸輪蝸桿機構。
2.3 收放機構設計
利用三維設計軟件,完成平衡肘升降機構的設計。蝸輪與蝸輪結合盤固定成一體,平衡肘上軸與蝸輪結合盤采用花鍵連接,蝸輪的轉動可以帶動平衡肘的旋轉,如圖3 所示。
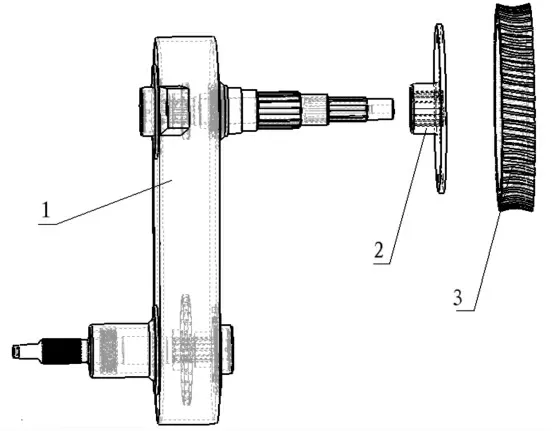
圖3 平衡肘與蝸輪的裝配示意圖
對蝸輪蝸桿以及連接固定裝置進行結構設計,選取合適的軸承,并組成裝配體。圖4 為蝸輪蝸桿裝配后形成的裝配結構示意圖。
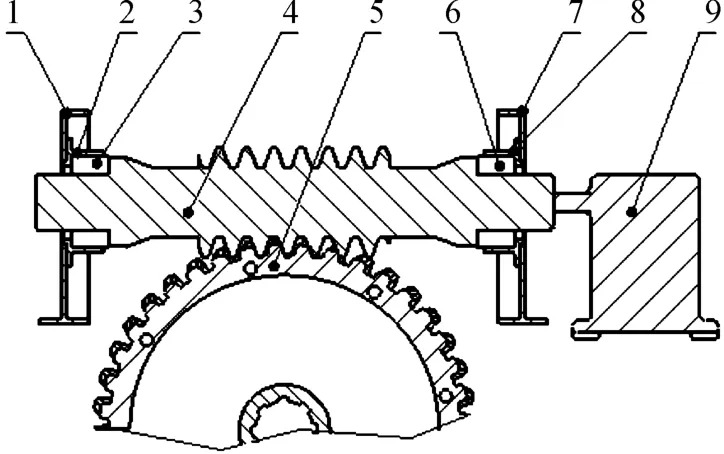
圖4 蝸輪蝸桿機構結構示意圖
平衡肘升降機構由電機、渦輪渦桿減速器、渦輪渦桿旋轉裝置組成,特點是:
1)動力傳動在平衡肘內部進行,保證在車輪收放時不切斷動力的傳遞。在水上航行時,可將車輪抬高到水面之上,減小車輪產生的水上阻力;
2)陸地行駛時,可在一定范圍內實現車體距地高調整,提高車輛的越障能力;
3)車輪在任何高度位置具有可靠的機械自鎖功能。
3 航行阻力數值模擬分析
采用數值模擬的方法對兩棲車輛在車輪放下和車輪收起兩種情況下的航行阻力進行計算,可以定量地分析車輪收起后的減阻效果。
3.1 計算網格的劃分
為了便于仿真模型的計算,首先要對流場區域劃分網格。為了提高計算速度,整個流場應當盡可能減少網格的數量,因此網格劃分采用了非結構網格與結構網格(六面體)相混合的方案,內部為非結構網格,外部為結構網格。兩棲車輛在航行過程中,車體周圍水域的形狀復雜,會出現興波等現象,為了能較好地模擬出水面波面的形狀,提高計算的準確度,應當在車體附近采用加密網格,遠離車體的流域網格可以適當的稀疏。整個流場區域的網格劃分如圖5 所示。
圖5 網格劃分
3.2 模型選擇和參數的確定
控制方程采用有限體積法離散,對流項使用二階迎風格式離散,擴散項和源項使用中心差分格式離散; 離散后的方程組采用Gauss-Seidel 法結合代數多重網格法迭代計算;流體采用不可壓縮流體,壓力速度耦合采用SIMPLEC 法處理,兩相問題采用流體體積函數法處理。
FLUENT 提供了分離式(segregated solver)和耦合式(coupled solver)兩類求解器。coupled solver 由于在計算中耦合了流動能量方程,因此收斂速度很快,但是coupled solver所需內存大約是segregated solver 的1.5 到2 倍。考慮到現有的機器配置,也考慮到VOF 模型只能用segregated solver。
對于控制條件的設定(operation conditions),由于本文模擬的是有自由液面的情況,所以必須設定重力加速度,這樣才能看到自由液面的變化。對于參考壓力位置的設定是比較重要的,它設定的好壞影響到收斂速度,一般設定在邊界處,本文選擇的是控制域的上邊界的中心處。在兩棲車輛運動的過程中,由于速度較小,車體周圍空氣的密度變化很小,可近似為一常數,設定空氣的密度是1.225 kg/m3。
對于邊界條件的設定,由于在GAMBIT 中已經標記出具有不同邊界條件類型的邊界和區域,在FLUENT 中分別給予設置即可。
3.3 計算結果分析
針對兩棲車輛在車輪放下和車輪收起兩種不同車體結構下的航行阻力進行仿真,計算水上行駛速度節點分別為:1.8 km/h、3.6 km/h、5.4 km/h、7.2 km/h、9.0 km/h、10.8 km/h。
3.3.1 速度矢量分布及分析
兩棲車輛以9.0 km/h 的速度航行時,車輪放下和車輪收起兩種狀態下的兩棲車輛繞流場的速度分布差異較大。兩棲車輛的吃水深用h 表示,距離水面h/2 處取一橫剖面,剖面上的速度分布如圖6 所示。
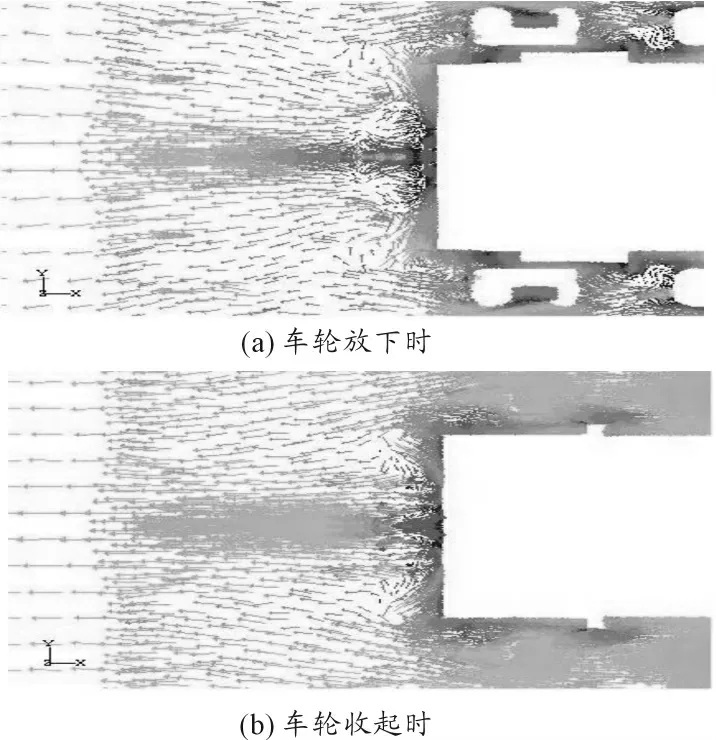
圖6 剖面處的流場速度
圖6表明,車輛處于車輪放下和車輪收起兩種行駛狀態下,在車輪周圍的流場都產生了不規則的渦流,而車輪放下時車體周圍的流場流動更加復雜。車體周圍的渦流是由于負壓的存在,使車體的尾部有較大尺度的渦流出現。而渦流的存在使該區域的壓力驟降。在壓差的作用下,便產生壓差阻力。
車輪放下時,車輪對車體周圍流場的影響更加明顯,使車體周圍出現很多不規則的渦流,流場更加復雜。車輪收起后,車輪對附近流域的影響降低,車體附近的渦流減少。
3.3.2 行駛阻力與航速的關系分析
車輛在車輪放下和車輪收起兩種狀態下,通過仿真,行駛阻力隨航速的變化規律如圖7 所示。
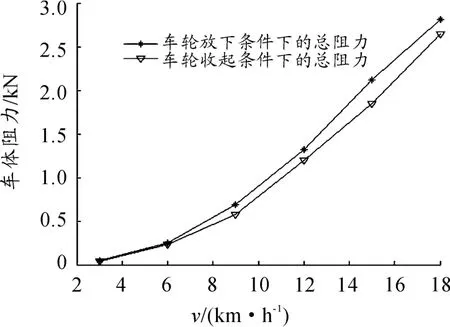
圖7 水上行駛總阻力
圖7表明,兩棲車輛不管處于車輛放下還是車輪收起狀態,行駛阻力都是隨著速度的增加而增大。同時表明,車輪收起后,兩棲車輛的行駛阻力較車輛放下有所減小,且隨著速度的增加減阻效果更加明顯。分析表明:車輪收起是兩棲車輛“減阻增速”行之有效的方法。
4 結論
快速性是衡量兩棲車輛戰場生存能力的重要指標。為了減小兩棲車輛的水上行駛阻力,本文對兩棲車輛的車輪收放進行了設計研究,并通過數值模擬的方法對減阻效果進行分析,從研究結果可得出如下結論:
1)設計時采用數值模擬的方法代替部分實物試驗,可以節省大量的人力、物力和財力;
2)對于過渡型車體,兩棲車輛的水上行駛阻力隨著速度的增加而增大;
3)車輪收放是兩棲車輛“減阻增速”的有效方法。車輪收放的設計研究是對兩棲車輛減阻技術的一項有益探索。
[1]盛振邦,劉應中.船舶原理[M].上海:上海交通大學出版社,2003.
[2]劉儒勛,王志峰.數值模擬方法和運動界面追蹤[M].合肥:中國科學技術大學出版社,2001.
[3]李殿璞.船舶運動與建模[M].哈爾濱:哈爾濱工程大學出版社,1999.
[4]李萬平.計算流體力學[M].武漢:華中科技大學出版社,2004.
[5]胡鍵.影響噴水推進器水動力性能的若干因素[J].哈爾濱工程大學學報,2008,29(1):11-15.
[6]居乃鵕.兩棲車輛水動力學分析與仿真[M].北京:兵器工業出版社,2005.
[7]鄭翔玉,余旭華.兩棲車輛水上加速性能數值模擬研究[J].計算機仿真,2012,29(11):71-74.
[8]鄭翔玉,賈小平.小型高速兩棲車水上行駛阻力數值模擬[J].艦船科學技術,2008,30(3):139-144.
[9]楊楚泉.水陸兩棲車輛原理與設計[M].北京:國防工業出版社,2003.
[10]袁濤,劉法明,劉云幗.集團軍偵察裝備生存能力分析[J].兵工自動化,2006,25(7):19-20.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
