二維彈道修正迫彈氣動特性仿真
2015-07-01 07:49:40胡金波楊新民
兵器裝備工程學報 2015年12期
胡金波,楊新民,何 穎,鄒 亞,孫 凱
(南京理工大學瞬態物理重點實驗室,南京 210094)
目前,采用衛星定位導航與低成本慣性或地磁測量的二維彈道修正技術,對庫存彈藥進行信息化改造可顯著提高射擊精度,可滿足戰爭中的精確壓制需求[1]。對常規彈藥進行制導化改進時,研究彈藥的氣動特性,是制導彈藥設計中必不可少的一個環節。傳統的氣動特性研究方法——風洞試驗、實彈試驗的周期長、耗費大已不能滿足現代武器設計的要求。CFD 方法由于精度較高,也常用于彈丸的氣動計算,商業軟件Fluent 能很好的得出彈丸的阻力升力等。
目前,固定鴨舵式彈道修正彈成為極具發展潛力的有控旋轉彈,其原理主要是鴨舵只能在彈丸軸向與彈體相對旋轉的方式實現彈道修正,例如阿連特技術系統公司(ATK)的固定鴨舵修正組件(PGK)方案[2]。國外Frank[3]、Sahu 等[4]分別利用試驗和數值計算的方法分析了鴨舵對彈道修正彈氣動特性的影響。Wei-Jen Su 等[5]使用CFD 軟件對155 mm 鴨翼布局的制導炮彈進行了仿真,得出了一些空氣動力系數,同時通過風洞實驗,測量了相關系數,為設計鴨舵制導炮彈提供了依據。國內郝永平等[6]采用滑移網格計算技術對二維彈道修正彈的修正部及整體進行了計算分析,得出了修正部旋轉舵力矩及控制舵力隨馬赫數的變化規律。程杰等[7]基于網格裝配的方法建立了二維彈道修正彈氣動力計算模型,并通過風洞實驗對計算結果進行了驗證。吳萍等[8]采用風洞實驗方法,對旋轉控制固定鴨舵二維彈道修正彈氣動特性隨馬赫數、攻角以及舵偏角的變化規律進行了研究,得到了相關氣動數據,并分析了變化規律。
目前國內對鴨舵式二維修正彈的氣動研究多數以ATK公司的設計方案為主,即制導組件內部使用發電機的原理隔離彈體和舵面的運動,固定鴨舵由一對同向舵和一對差動舵組成。本文所研究的彈丸采用一對NACA 翼型的對稱固定鴨舵布局方案,彈道修正部采用電動機隔離鴨舵與彈體的旋轉運動。使用fluent 和tecplot 分別對修正彈進行氣動仿真和流場后處理,初探一對NACA 翼型固定鴨舵布局的彈道修正方案對彈丸氣動特性的影響。
1 仿真模型的建立
彈丸氣動仿真過程如下:將UG 軟件建立好的幾何模型保存為igs 格式導入ANSYS 的ICEM 模塊,建立求解域后,進行網格劃分[9]。劃分好的網格導出為MSH 格式文件導入FLUENT 中,通過設置算法,設置計算模型,設置監視器等等操作,即可進行計算。計算結束條件除了通過殘差辨別收斂,還可以通過空氣動力監視器來檢查解的收斂情況。
本文研究的旋轉控制彈道修正迫彈是應用鴨舵修正彈道原理,為提高修正能力,鴨舵選用NACA 低亞聲速翼型。修正彈使用的是尾翼穩定的原理,為保持彈丸飛行的穩定性,選擇張開式尾翼。即迫彈尾翼在發射前在約束繩的作用下處于收縮狀態,發射時,炮管里火藥將燒斷約束繩觸發彈簧,使尾翼在彈簧的作用下張開。本文研究的彈丸幾何模型如圖1 所示。
圖1 修正彈外形
本文的流場網格劃分區域設定為一個圓柱體,圓柱體的直徑為彈徑的12 倍,長度為彈長的20 倍,即計算域直徑為1 440 mm,高為18 400 mm,圓柱體的幾何中心取在彈丸的頭部頂點處,網格總數為3 542 869。網格劃分選擇非結構網格,在舵翼、彈尾處及彈體表面變化劇烈的地方網格尺寸適當取小。彈體網格劃分如圖2 所示。
圖2 彈體表面網格劃分
在邊界條件的設置上,外邊界取壓力遠場條件。固體邊界的確定是將彈體表面設置為無滑移的、絕熱固壁。而初始條件是將整個求解區域的初始流場由壓力遠場邊界條件來賦值,即取遠場來流參數值。
2 CFD 數值計算理論
數值計算是基于流體力學基本控制方程(Navier-Stokes方程),建立氣流繞彈丸流場數學力學模型,在一定邊界條件下求解飛行體表面流場,進而求出作用在彈丸上的空氣動力[10]。本文的鴨式氣動布局制導迫彈流場數值模擬使用的是積分形式的Navier-Stokes 方程。
連續性方程為

式(1)中: Ω 為積分方程的控制體dΩ=dxdydz; S =?Ω 為控制體表面; ρ 為密度; V 為流體運動的速度矢量。
動量方程為

能量方程為
Spalart-Allmaras 模型中的輸運變量是與渦黏性νt相關的量除了在黏性次層之外與υt相等。的輸運方程為

其中: Gυ是湍流黏性生成項; Yυ為在接近壁面區域存在壁面阻礙和黏性阻尼而引起的湍流黏性耗散項;和Cb2分別為常數,υ 代表“黏性”。
3 Fluent 計算方法[11]
1)定義求解器和選擇湍流模型。使用Density Based 密度基隱式求解法。黏性模型選擇Spalart-Allmaras 湍流模型,選擇Gradient Option 下的Green-Gauss Node Based。基于節點的高斯克林函數求梯度法精度高,而且這種方法適合非結構化的網格,可以更加準確的計算阻力。
2)定義流體的物理屬性。材料設為air,密度項設置為ideal-gas,在“Viscosity”一項中選擇Sutherland。
3)操作環境設置。把參考壓力設置為0,絕對壓力設為一個大氣壓。
4)邊界條件設置。設置飛行馬赫數和攻角的正余弦值,其他壓力遠場條件保持默認。
5)求解器設置。設置求解控制參數,在低馬赫數或小攻角時庫朗數項可以設置為5,高馬赫數或大攻角時需減小庫朗數項;在Flux Type 通量類型里設置Roe-FDS 默認的通量差分方法。設置Modified Turbulent Viscosity 方程的差分格式為二階迎風格式,其余項設置為默認值。
6)為方便判斷計算的收斂情況,先進行少量次數的迭代求解,迭代完成后,再分別設置阻力系數監視器、升力系數監視器以及俯仰力矩系數監視器。經過適當次數的迭代計算后,力和力矩的監視曲線基本不再波動,表示基本收斂。
4 計算結果及分析
數值模擬的計算條件為
1)馬赫數:Ma=0.4,0.6,0.8,0.9,0.95,1.0
2)攻角:α=0°,2°,4°,6°,8°
圖3 是馬赫數為0.4 ~1.0 時彈丸阻力系數隨攻角變化曲線,由圖可知該彈丸的阻力系數隨攻角呈非線性變化,曲線的這種變化趨勢也符合一般彈丸的阻力變化規律。在Ma <0.8 的工況下,彈丸的阻力系數變化不是很大,而在Ma >0.8 的情況下,彈丸的阻力系數卻明顯增加。這種情況符合彈丸跨音速飛行阻力規律。
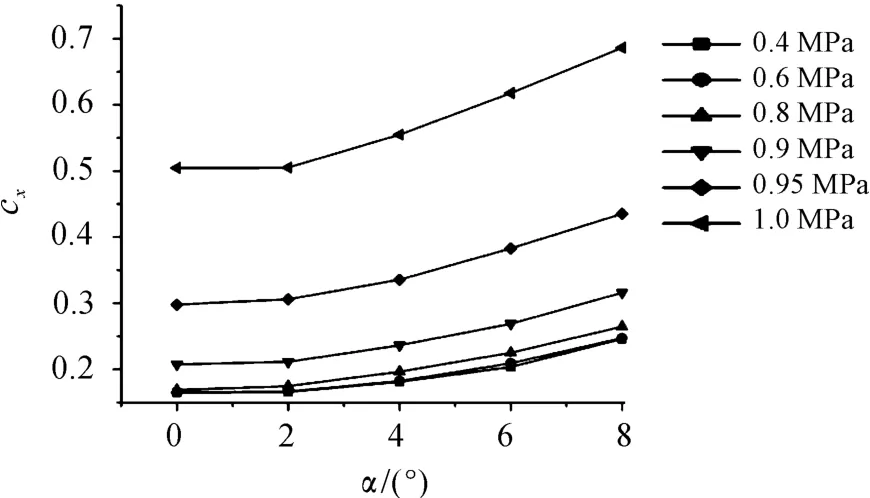
圖3 不同馬赫數線阻力系數隨攻角變化曲線
圖4中給出的是來流馬赫數為0.4 ~1.0 時彈丸升力系數隨攻角變化曲線,從圖中可以看出,不同馬赫數下彈丸的升力系數隨攻角的變化趨勢近似為線性,并且隨著攻角的增加而增加,不同的是每條升力線的斜率不相同,馬赫數越大斜率越大。
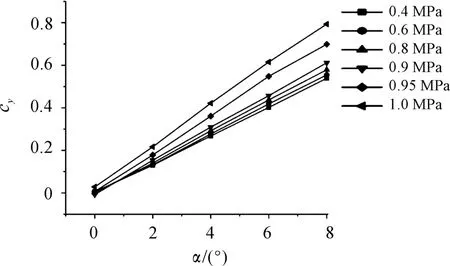
圖4 不同馬赫數線升力系數隨攻角變化曲線
不同馬赫數下的俯仰力矩系數隨攻角變化曲線如圖5所示,變化規律基本呈線性。由于鴨舵為NACA 翼型,使得彈丸飛行時產生平衡攻角,圖中可以看出平衡攻角大約在1° ~2°之間。但是在來流馬赫數高于0.8 Ma 時,曲線明顯“上抬”。這是由于來流馬赫數超過了臨界馬赫數,鴨舵翼片的上下表面都出現局部超音速區和局部激波。隨著上翼面激波擴展到后緣,超音速區擴展到整個上翼面,壓力中心位置向后移動,造成俯仰力矩系數“抬升”,這種變化現象符合翼型的跨音速特性。由于fluent 中坐標系與彈體坐標系的z軸相反,所以在正攻角的情況下,出現正俯仰力矩系數的情況。
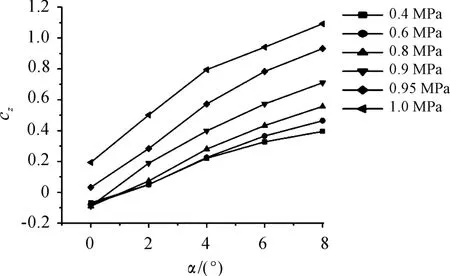
圖5 不同馬赫數下俯仰力矩系數隨攻角變化曲線
為了更直觀形象地了解該彈丸在飛行過程中其彈體附近的流場變化情況,使用Tecplot 軟件對0°攻角,來流速度為0.8 Ma 工況下的計算結果進行后處理,得到了彈體表面的壓力系數分布云圖和彈體表面切面附近流場馬赫數云圖。
彈體表面壓力云圖如圖6 所示,來流在彈頭部積聚,形成壓縮波,故彈頭部頂點處壓強最大,達到1.5 MPa 左右。氣流經過制導組件球面型頭部后,遇到圓錐形物面,這一階段,由于物面的折轉,使得氣流膨脹,故壓強減小。當氣流順著圓錐面流動到制導組件的圓柱部時,物面的連續折轉,使氣流繼續膨脹,壓強繼續下降。制導組件與頭螺的結合處存在一個連續的外折角,當氣流流經此處時,產生了壓縮,壓力急劇增大,產生一道馬赫波,此處壓強達到1.2 MPa 左右。在下彈體表面,氣流再一次發生強烈膨脹,而后壓縮,產生了膨脹波。在彈底的氣流分為兩部分,外部的氣流速度較高,對于底部起著摻混和引射的作用。內部的氣流由于沒有來自其他方面補充的空氣流量,氣流稀薄,并在底部空間形成了一個低壓回流區。
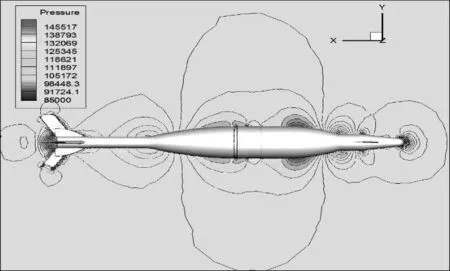
圖6 彈體表面壓力云圖(Ma=0.8,α=0°)
通過馬赫數云圖(圖7)可以看出彈體表面來流速度的變化規律。在鴨舵前翼端、頭螺與圓柱部的連接處以及尾翼的局部區域氣流的速度較高。這是由于在彈體的這些區域彈體外輪廓相對于來流的方向發生外折,進而產生馬赫波,波后氣流速度增加。在下彈體和尾管的連接處、制導組件與彈體連接處由于氣流的折轉,形成了壓縮波,所以氣流速度降低。在彈底部截面,氣流先膨脹后壓縮,所以彈底區域的速度較低。
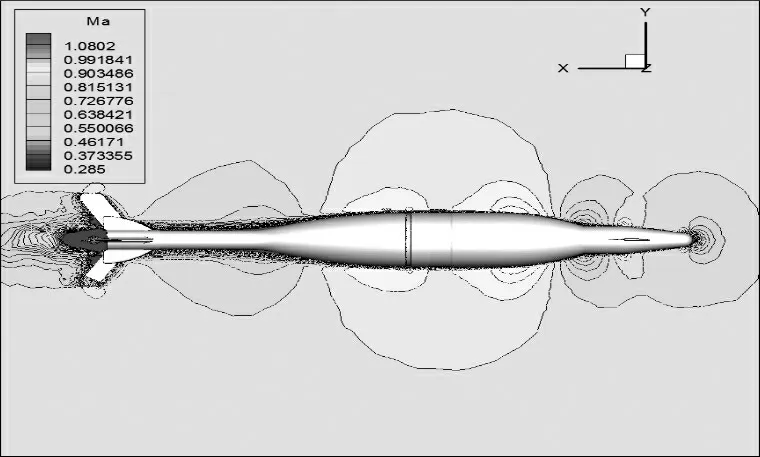
圖7 彈體表面馬赫數云圖(Ma=0.8,α=0°)
在以上兩圖中,鴨舵是NACA 翼型,上下表面非對稱,故在鴨舵區域形成上下不對稱的壓強分布和速度分布,同時舵面的下洗作用使得下彈體與尾管的結合處形成不對稱的洗流場,造成這一區域的壓力和速度變化不均勻。以下對這兩個區域進行單獨分析。
由圖8 可以看出,舵片使得彈體上下表面壓力分布不均等,彈體下表面附近壓強高于彈體上表面壓強,由此形成升力,這種情況也符合薄翼型理論。舵片附近流線見圖9,舵片上表面的氣流速度大,下表面的氣流速度小,翼片下方氣流從后緣向上繞流,在后緣上部形成渦片。氣流脫離舵翼后緣渦片后,渦線從后緣伸出,并與流線重合,形成自由渦。舵翼的固有渦線與自由渦線在舵翼后部形成一個渦系。
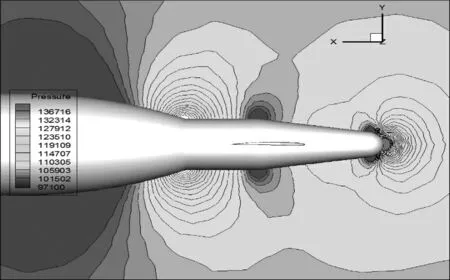
圖8 鴨舵區域壓力云圖(Ma=0.8,α=0°)
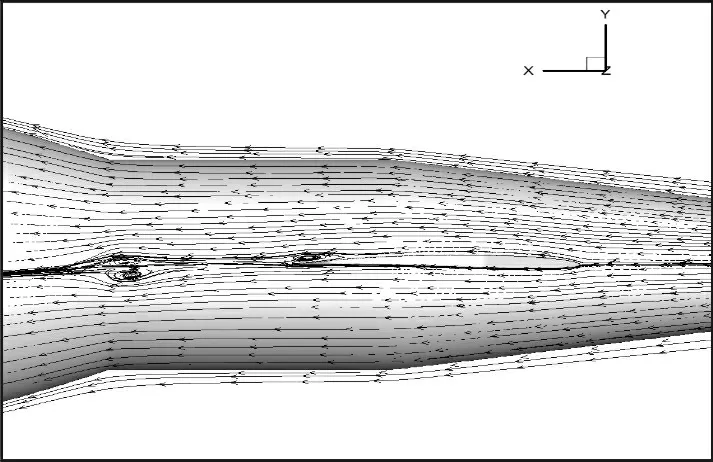
圖9 鴨舵區域流線(Ma=0.8,α=0°)
由圖10 可以看出,在下彈體與尾管的結合處,彈體附近的壓力分布不均勻。下表面的壓強系數高于上表面,這也是形成俯仰力矩的原因。從圖11 所示這一區域的流線圖可以看出,鴨舵下洗后的氣流沿彈體流動后在這一區域匯合,不對稱氣流形成一個有形的渦片。
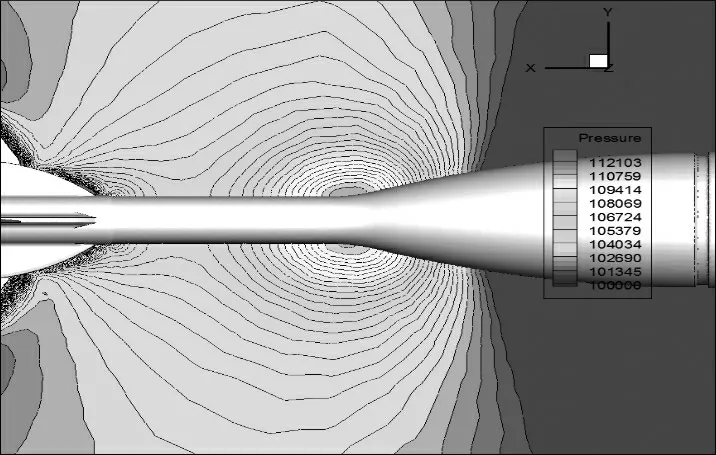
圖10 下彈體與尾管結合處壓力云圖(Ma=0.8,α=0°)
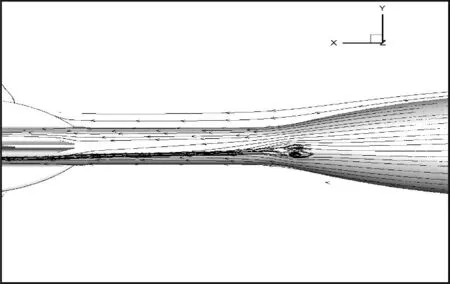
圖11 下彈體與尾管結合處流線(Ma=0.8,α=0°)
5 結束語
對普通彈藥進行制導化改進過程中,彈丸的氣動特性也會發生相應的變化,準確的得到制導彈藥的氣動參數對后續的研究具有重要意義。本文首先對一對NACA 翼型固定鴨舵式布局的迫彈進行了非結構化網格劃分,然后使用CFD商業軟件Fluent 對全彈的氣動特性進行仿真計算,得到了彈丸較準確的氣動力參數,再使用tecplot 軟件進行后處理,得到了彈丸彈身附近的流場特性圖。分析可知,所得結果符合彈丸的飛行氣動特性和流場規律,其仿真結果可以為彈道修正彈的飛行穩定性校核和彈道參數計算提供依據。
[1]張開創,劉秋生,熊然.固定鴨舵彈道修正組件發展[J].飛航導彈:2014(3):64-67.
[2]John A Clancy,Thomas D Bybee,William A Friedrich.Fixed canard 2-D guidance of artillery projectiles[P].US Patent 6981672,2006.
[3]Frank Fresconi,Tom Harkins. Aerodynamic characterizations of asymmetic and maneuvering 105mm,120mm and 155mm fin-satbilized projectiles derived from telemetry experiments[R]. AIAA Atmospheric Flight Mechanics Conference,2011.
[4]Sahu J,Costello M.Montalvo C.Development and application of multidisciplinary coupled computational techniques for projectile aerodynamics[C]//7th International Conference on Computational Fluid Dynamics, Hawaii:AIAA,2012.
[5]Wei-Jen Su,Curtis Wilson,Tony Farina,et al.Aerodynamic characterization of a canard guided artillery projectile[J].45th AIAA Aerospace Sciences Meeting and Exhibit,2007.
[6]郝永平,孟慶宇,張嘉易.固定翼二維彈道修正彈氣動特性分析[J].彈箭與制導學報,2012,32(3):171-173.
[7]程杰,于紀言,王曉鳴.次口徑非對稱鴨舵對彈道修正彈氣動特性的影響[J].北京理工大學學報,2015,35(2):133-138.
[8]吳萍,陳少松,楊晉偉,等.旋轉控制固定鴨舵二維彈道修正彈氣動特性[J].彈道學報,2014,26(3):6-10.
[9]紀兵兵,陳金瓶.ANSYS ICEM CFD 網格劃分技術實例詳解[M].北京:中國水利水電出版社,2012.
[10]任玉新,陳海昕.計算流體力學基礎[M].北京:清華大學出版社,2006.
[11]于勇.FLUENT 入門與進階教程[M].北京:北京理工大學出版社,2008.