基于虛擬儀器的直流電機模糊PID控制實驗研究
2015-06-23 12:20:27費紅姿范立云費景洲楊家龍
實驗技術與管理 2015年3期
費紅姿,范立云,費景洲,劉 友,董 全,楊家龍
(哈爾濱工程大學能源與動力工程學院,黑龍江哈爾濱 150001)
儀器設備研制與應用
基于虛擬儀器的直流電機模糊PID控制實驗研究
費紅姿,范立云,費景洲,劉 友,董 全,楊家龍
(哈爾濱工程大學能源與動力工程學院,黑龍江哈爾濱 150001)
應用ELVISⅡ虛擬儀器實驗平臺對直流電機模塊進行模糊PID速度控制實驗設計。首先分析了電機的控制原理,在LabVIEW環境中設計了PID控制器及切換式模糊PID控制器,并對實驗數據進行對比分析,與PID控制相比,模糊PID控制響應速度快、穩態精度高。最后進行了電機模塊控制實驗設計。實驗教學結果表明:基于虛擬儀器設計的模糊PID速度控制實驗可以激發學生學習控制系統設計的興趣,調動學生的主動性,進一步提高實驗教學質量。
直流電機;模糊PID控制;虛擬儀器
電機轉速控制是控制類課程實驗的典型項目,傳統的實驗系統通常由控制器、驅動器和電機組成,其特點是硬件電子線路和系統軟件固定,學生在實驗過程中只是按照固定的步驟去做,不方便學生自行設計和二次開發,系統可擴展性差[1-2]。
虛擬儀器是以計算機為核心,配以相應功能的硬件作為信號的輸入輸出接口,利用軟件開發平臺在計算機上虛擬出儀器的面板和功能,在此平臺上能為用戶提供更廣闊的發揮空間[3]。基于虛擬儀器技術建立的開放式實驗教學平臺可以給予學生更大的發揮空間,是未來實驗教學發展的必然趨勢[4-5]。ELVISⅡ是NI公司推出的虛擬儀器平臺,可以實現教學儀器、數據采集和實驗設計一體化。在該平臺上可以進行電子電路的設計與測試、控制系統設計與實驗等,具有很好的可通用性[67]。本文在基于ELVISⅡ虛擬儀器實驗平臺上設計了直流電機的轉速控制實驗系統,應用模糊PID控制算法設計了控制器,改善了控制效果。此實驗系統可以將原來單一的驗證性實驗模式發展為開放式的實驗模式,為學生提供一個開放式的軟件及硬件平臺。
1 基于ELVISⅡ的直流電機控制實驗平臺
1.1 ELVISⅡ簡介
教學實驗套件是為課堂或實驗室服務的先進教學平臺,可以進行電路設計、儀器控制、嵌入式/單片機等課程的理論教學。ELVISⅡ原型實驗板具有很好的通用性,通過外部接口金手指插槽可以連接不同的功能模塊,也可以根據需要自行設計功能模塊,并在LabVIEW軟件環境下編寫相應的程序,完成數據采集、控制、保存、分析和顯示功能,ELVISⅡ虛擬儀器平臺如圖1所示。

圖1 ELVIS虛擬儀器平臺
1.2 直流電機控制模塊
直流電機控制模塊如圖2所示,由伺服電機、功率放大器組成,通過金手指連接端子插在ELVISⅡ實驗箱上。

圖2 直流電機控制模塊
伺服電機的額定電壓為12V,轉速為1 900 r/min,功率放大器的輸入為脈寬調制信號(PWM),功率放大器的輸出信號驅動伺服電機,放大器增益為2.3。在伺服電機上裝有一個光電編碼器和轉速傳感器,用于測量電機軸轉過的角度和電機轉速。直流電機控制模塊可以實現電機的旋轉角度和電機轉速控制。編碼器和轉速傳感器與ELVISⅡ上的數據采集單元相連,獲得電機轉過的角度和轉速信號,并傳輸給控制器,與期望值進行比較得到偏差,再經過控制器得到輸出,然后將控制器的輸出轉化為PWM信號給功率放大器,改變電機的輸入電壓,從而實現對電機的控制。
2 直流電機控制模塊實驗原理
電機速度控制系統是測控類課程實驗的典型項目,本文主要研究電機轉速控制實驗系統。
直流電機速度控制原理如圖3所示。通過轉速傳感器測得直流電機的轉速信號,經過信號調理電路,DAQ數據采集得到電機的實際轉速,設定轉速與實際轉速的偏差傳輸給速度控制器,速度控制器的輸出轉化為脈寬調制信號給功率放大器,改變電機的輸入電壓,從而改變電機的轉速。
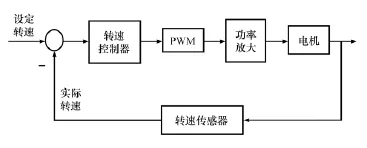
圖3 直流電機速度控制原理框圖
應用ELVISⅡ虛擬儀器實驗平臺設計的直流電機轉速控制實驗的硬件系統結構如圖4所示,包括計算機、ELVISⅡ實驗平臺及直流電機模塊3部分。模擬輸入用AI4通道采集輸入信號,設定采樣時鐘的采樣率為40 Hz,每通道采樣長度為1 000點,采用連續采樣模式。模擬輸出程序把控制量用AO0通道輸出。
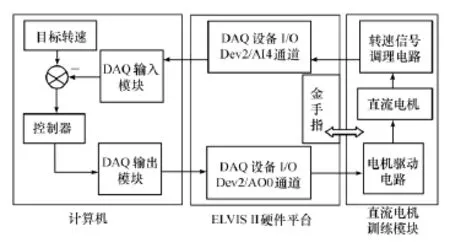
圖4 直流電機控制硬件結構
3 速度控制器設計
3.1 PID控制器設計
直流電機PID控制程序框圖如圖5所示。比例系數Kp=0.178、積分系數Ki=0.01、微分系數Kd=0,電機由1 000r/min上升到1 500r/min的轉速曲線如圖6所示。從曲線圖中可以看出,PID控制的響應速度較慢,電機達到期望轉速的時間比較長。
3.2 模糊PID控制器設計
PID控制適合于線性控制系統,而電機在轉動的過程中存在一定的非線性,單純的PID控制很難滿足快速而穩定的控制要求。模糊控制是通過專家經驗制定的決策表來決定控制量,具有系統響應速度快、超調小、過渡過程時間短等優點。但是由于模糊控制通常采用誤差與誤差的變化率作為控制器輸入,本質上相當于非線性PD控制,存在小偏差附近下控制效果不好和穩態控制精度不高的缺點。本文吸取了上述2種控制策略的優點,將模糊控制和PID控制結合起來,設計了切換式模糊PID控制器。即大偏差時采用模糊控制,小偏差時采用PID控制,可實現比較好的控制效果。
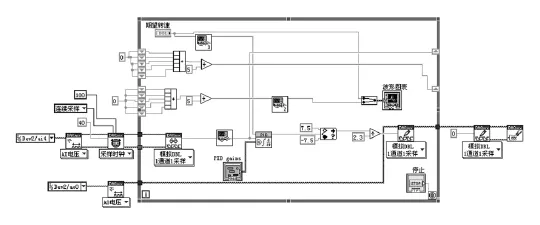
圖5 直流電機PID控制程序框圖
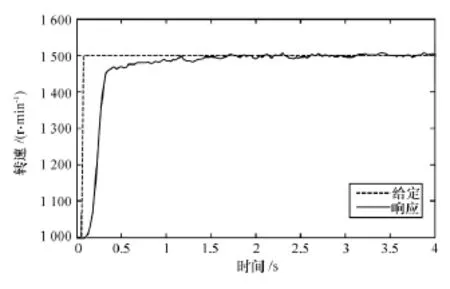
圖6 電機轉速PID控制
3.2.1 變量模糊化
本文采用二維模糊控制器,即以電機轉速誤差、誤差的變化率作為輸入,u(t)作為控制器的輸出。根據直流電機的實際轉速控制狀況,電機轉速誤差e(t)的變化范圍為[-150,150]r/min,誤差變化率de(t)/dt的變化范圍為[-100,100]r/min,它們的模糊論域均為[-6,6],所以轉速誤差e(t)的量化因子為Ke=0.04,誤差變化率de(t)/dt的量化因子為Kde=0.06。模糊控制器的輸出量u(t)的變化范圍為[-7.5,7.5],量化因子為Ku=0.9。每個量化因子在控制過程中可調。轉速誤差e(t)和控制量u(t)取7個模糊子集,直流電機在控制過程中,轉速誤差變化率de(t)/dt的變化對電機轉速的變化趨勢影響較大。因此,轉速誤差變化率de(t)/dt的模糊子集劃分應更細致,取8個模糊子集。得到的u(t)與e(t)和de(t)/dt的映射關系如圖7所示。
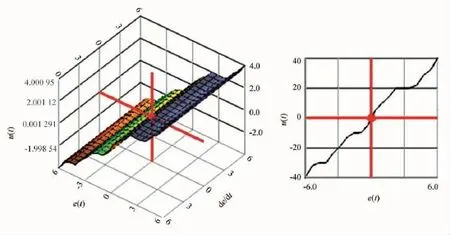
圖7 u(t)與e(t)和de/dt的映射關系
3.2.2 模糊PID切換控制器設計
通過開關來實現2種控制算法的切換。閾值為最大誤差的絕對值,當誤差大于閾值時切換到模糊控制,當誤差小于閥值時切換到PID控制。直流電機的額定轉速為1 900r/min,穩態調速率2%左右,直流電機穩態可認為是線性或準線性。電機穩態附近采用PID控制,通過仿真確定轉速誤差e=40r/min為切換量時,控制效果較好。根據上述分析,本文模糊PID控制器的開關切換量e=40r/min,|e|≥40r/min時采用模糊控制,|e|<40r/min時采用PID控制。
直流電機模糊PID控制程序如圖8所示。
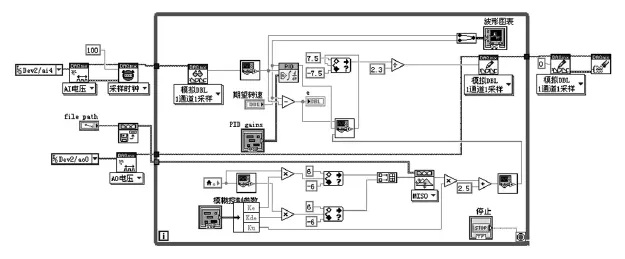
圖8 直流電機模糊PID控制程序框圖
得到的電機轉速模糊PID控制曲線見圖9。模糊PID控制與PID控制的響應指標比較見表1。
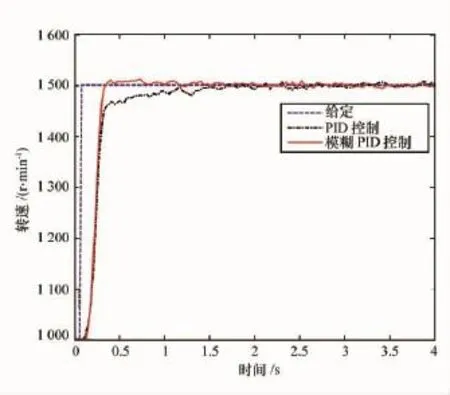
圖9 電機轉速模糊PID控制實驗曲線
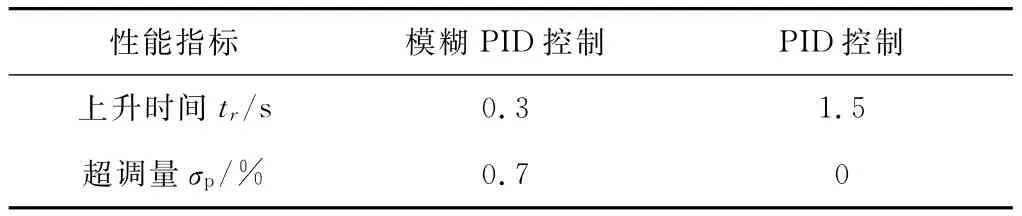
表1 模糊PID控制與PID控制的響應性能指標
從響應曲線可以看出,模糊PID控制的響應速度比PID控制快,電機達到期望轉速的時間短,控制精度也比較高,控制效果比較理想。
4 直流電機速度控制實驗設計
直流電機控制實驗是自動控制原理課程的實驗之一。學生在學習有關LabVIEW編程和控制算法的基礎上,參照上述提供的控制器設計方法進行控制器的設計,通過在虛擬儀器面板上直觀地操作控制器參數,掌握控制器的調節特性,對理論知識會有更深刻、更具體的理解。
4.1 實驗界面
用LabVIEW編程實現直流電機轉速控制實驗的人機交互界面如圖10所示。實驗中可以實現模糊控制器和PID控制器參數調節、數據存儲、數據顯示等功能。
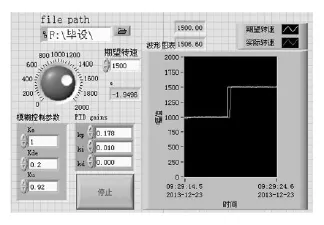
圖10 直流電機轉速模糊PID控制人機交互界面
4.2 實驗步驟
對電機轉速進行PID控制和模糊PID控制實驗,輸入1 000r/min階躍到1 500r/min階躍信號,測電機的階躍響應曲線。操作步驟:
(1)連接好ELVISⅡ虛擬儀器教學實驗套件,確保信號采集和輸出正常。
(2)PID控制實驗。在人機交互面板上設定期望轉速為1 000r/min,PID控制參數設置初始值:Kp=0.178、Ki=0.01、Kd=0。改變PID控制參數,觀察控制效果。
(3)模糊PID控制實驗。為了比較PID控制和模糊PID控制的效果,PID控制參數設置初始設置:Kp=0.178、Ki=0.01、Kd=0;模糊控制參數設置為Ke=1、Kde=0.2、Ku=0.92。觀察控制效果。
(4)在1 000~1 500r/min范圍內,改變期望轉速為1 500r/min,記錄控制曲線,計算控制系統輸出曲線的性能指標。
(5)實驗結果分析。
5 結束語
基于ELVISⅡ的虛擬儀器教學實驗平臺可以實現實驗的操作及數據分析,功能強大。通過具體的實驗設計、操作,能使學生對測控系統、自動控制原理理論知識、控制器設計有一個比較全面的認識及掌握,充分激發學生學習理論知識的積極性。
本文基于ELVISⅡ虛擬儀器平臺和直流電機模塊設計了直流電機速度控制實驗系統,在此平臺上,進行了模糊PID控制器的設計,取得了較好的控制效果,驗證了在此平臺上進行自主實驗的可行性。
(References)
[1]孫斌,趙玉曉,張新娜.基于虛擬儀器的自控原理實驗教學軟件開發[J].實驗技術與管理,2012,29(5):105-108.
[2]尤麗華,周洋.基于虛擬儀器的測試技術實驗教學系統建立[J].實驗技術與管理,2011,28(2):83-86.
[3]榮雅君,劉琳,高廣峰,等.虛擬儀器在實驗教學中的應用[J].電力系統及其自動化學報,2009,21(1):78-82.
[4]余金華.基于虛擬儀器技術的實驗教學研究[J].安徽工業大學學報,2009(11):123-124.
[5]宋玉杰.基于NI ELVIS的遠程虛擬實驗室的研究[J].電子設計工程,2009(1):34-38.
[6]徐苒,金暄宏,戴曙光.基于NI ELVISⅡ的溫度采集系統設計[J].儀表技術,2010(2):33-35.
[7]周求湛.基于NI ELVIS的網絡化實驗教學平臺[J].實驗室研究與探索,2012,31(5):154-157.
Study on Fuzzy-PID control experiment of DC motor module based on virtual instrument
Fei Hongzi,Fan Liyun,Fei Jingzhou,Liu You,Dong Quan,Yang Jialong
(College of Power and Energy Engineering,Harbin Engineering University,Harbin 150001,China)
DC motor speed control experiment using Fuzzy-PID control algorithm is designed based on the NIELVISⅡvirtual instrument.The control principle of the DC motor module is analyzed first,the PID controller and Fuzzy-PID controller are designed and applied in the system.The experimental data is analyzed through comparing two algorithms.DC motor control experiment for students is designed finally.The actual teaching results show that the students’interests in studying the control system design are inspired greatly by this experiment platform,and teaching quality could be improved further.
DC motor;Fuzzy-PID control;virtual instrument
TM33;TP273
A
1002-4956(2015)3-0081-04
2014-07-22 修改日期:2014-09-01
黑龍江省高等教育科學研究“十二五”規劃課題(HGJXHB2110355);哈爾濱工程大學教育教學改革研究項目(JB2013YB11);哈爾濱工程大學能源與動力工程學院精品課程建設項目
費紅姿(1970—),女,上海,博士,副教授,研究方向為動力裝置控制與測試技術
E-mail:fhz@hrbeu.edu.cn
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
發明與創新(2016年38期)2016-08-22 03:02:52
