并聯機器人在機械工程實驗教學中的應用
2015-06-23 12:20:28安昭輝侯冬冬張丁龍
實驗技術與管理 2015年3期
沈 剛,安昭輝,李 翔,侯冬冬,張丁龍
(中國礦業大學機電工程學院,江蘇徐州 222116)
并聯機器人在機械工程實驗教學中的應用
沈 剛,安昭輝,李 翔,侯冬冬,張丁龍
(中國礦業大學機電工程學院,江蘇徐州 222116)
在控制工程基礎、機器人技術及單片機等課程教學中,充分利用六自由度并聯機器人平臺進行實驗教學,可解決機械工程實驗教學中先進機器人技術教學難的問題。結合控制工程基礎、機器人技術及單片機等課程的具體教學實例,對六自由度并聯機器人在機械工程實驗教學中的應用進行了探索與實踐。實驗結果證明,該方法提高了學生對控制工程基礎、機器人技術及單片機等課程的理解,培養了學生動手能力,實驗教學效果良好,為控制工程基礎、機器人技術以及單片機等課程的實驗教學提供了一種新的方法。
實驗教學;六自由度并聯機器人;控制工程基礎;機器人技術;單片機
高校機械工程自動化專業的控制工程基礎、機器人技術以及單片機等課程作為工業自動化產業人才培養的重要基礎課程,主要講授自動化基本原理及應用[1-2]。這些課程實踐性很強,理論知識的實驗驗證環節非常重要,但目前國內高校在機械工程的實驗教學中主要還沿襲傳統的教學方法,理論教學強于實驗教學,學生難以充分應用所學的課程解決實際工程問題[3-4]。
六自由度并聯機器人具有剛度大、承載能力強、結構比較簡單、精度高、沒有誤差累積和易于控制等優點,廣泛應用于國防和民用先進制造領域[5-6],如美國研制基于并聯驅動的“大狗”平臺[7-8]和基于Delta并聯機器人的3D打印技術[9-10],而先進機器人技術和3D打印技術在2013年麥肯錫全球研究所列出的改變世界經濟的12項顛覆性技術中分別排名第5和第9。為提高高校機械工程課程的教學質量,鍛煉學生對控制工程基礎、機器人技術以及單片機等課程學習中的實踐應用能力,加深對這些基礎課程概念和設計的理解,開發基于先進機器人技術的機械工程實驗教學非常必要。
1 六自由度并聯機器人工作原理及組成
六自由度并聯機器人由機械部分和控制系統組成。機械部分由動平臺、靜平臺、執行器及連接部分等構成;控制系統的上位機設定有六維坐標參考信號,控制器經過反解矩陣運算得出6個執行器應給定的長度,然后通過執行器的驅動程序控制6個執行器的位移,從而使六維坐標在動平臺上得到了復現。圖1為六自由度并聯機器人基本原理。

圖1 六自由度并聯機器人基本原理
2 六自由度并聯機器人系統制作
為了提高學生的實踐動手能力,六自由度并聯機器人采用模塊化的機構組裝方式,控制系統采用基于STM32F407ZET6的嵌入式控制器,利用LabVIEW編寫了上位機調試界面,并通過以太網進行數據傳輸及命令發送,最終實現對6個步進電機絲桿滑臺的控制。
搭建的六自由度并聯機器人所需設備及材料見表1,外購實物平臺如圖2所示。
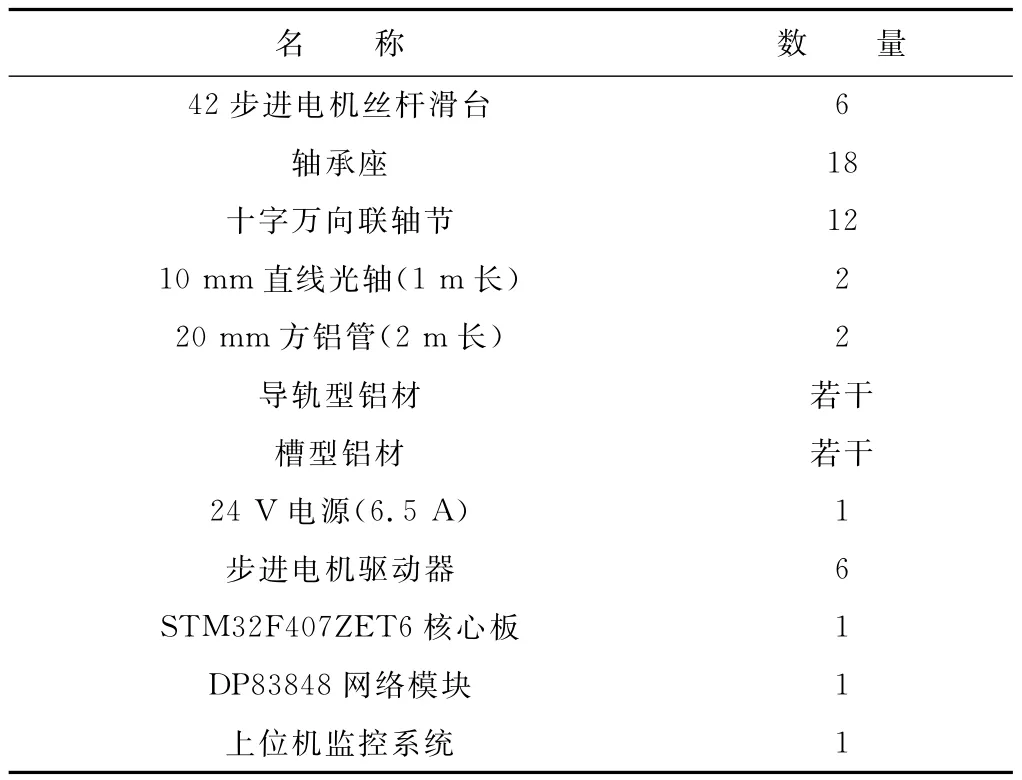
表1 設備及材料

圖2 六自由度并聯機器人實物圖
3 六自由度并聯機器人控制系統
主控制芯片采用了基于Cortex M4內核的STM32F407高性能微控制器,其主頻高達168MHz,且集成了單周期DSP指令和浮點運算單元(floating point unit,FPU),能夠滿足六自由度并聯機器人反解矩陣的運算,并進行實時控制[11]。
3.1 六自由度并聯機器人反解算法
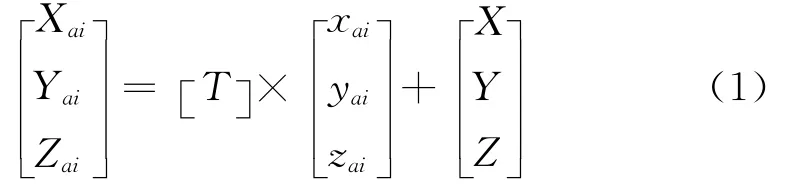
圖3為六自由度并聯機器人六維坐標α、β、γ、X、Y、Z均為0時靜平臺與動平臺各個鉸接點的初始坐標。其中α、β、γ(歐拉角)分別為上平臺與x軸、y軸和z軸的夾角,X、Y、Z分別為沿上平臺中心點的x方向、y方向和z方向的平移長度。給定一個六維參考坐標后,代入公式(1),計算得出動平臺(上平臺)各個鉸接點的坐標(Xai,Yai,Zai),再根據公式(2)求靜坐標與動坐標的直接距離,繼而求得6個軸的長度Li[12]。
其中姿態旋轉矩陣:


圖3 六自由度并聯機器人坐標系定義
3.2 人機交互驅動程序
六自由度并聯機器人人機交互采用上位機加下位機的控制方式。上位機為普通計算機,開發了六自由度并聯機器人的LabVIEW監控程序系統,負責接收下位機通過以太網UDP模式發送過來的當前設定位置、6個缸位移等數據,同時可以發送命令到下位機進行實時控制[13]。下位機為STM32F407主控制器,軟件部分主循環進行以太網的輪詢處理,而反解矩陣運算、以太網數據發送與接收、步進電機驅動程序、運動模式判定及執行均通過中斷程序進行處理。
程序的總流程圖如圖4所示。首先對各個IO端口、以太網、定時器等進行初始化,然后進入主循環的以太網輪詢處理程序,下位機和上位機開始通過以太網進行數據通信。當上位機發出運動模式命令時,1 ms中斷的定時器1自動計算運動模式的六維坐標并進行設定。同時1ms中斷的定時器2實時反解出6個缸的長度,定時器3通過發送脈沖和方向信號對步進電機絲桿滑臺實現穩定的位置控制,最終實現運動模式的復現。

圖4 六自由度并聯機器人控制系統流程圖
3.3 步進電機驅動程序
步進電機驅動器依靠一個脈沖信號和一個方向信號進行控制,步進電機驅動程序通過定時器中斷調用。當定時器產生中斷時,將給定的位置與當前位置進行比較,通過偏差的正負確定電機的正反方向,同時每發出一個脈沖,當前位置根據方向自加1或自減1。程序流程如圖5所示。

圖5 步進電機驅動程序流程圖
4 六自由度搖擺臺運行測試
圖6是六自由度并聯機器人在x-y平面繞原點作半徑為10mm的圓周運動和搖擺運動的實驗結果,由下位機實時反饋到上位機LabVIEW界面的6個缸的長度。從實驗結果可以看出:利用步進電機驅動和嵌入式控制器可以實現六自由度并聯機器人較高的跟蹤精度,驗證了控制工程基礎、機器人技術及單片機等課程在實踐中的應用。

圖6 六自由度并聯機器人實驗結果
5 結束語
本文所述基于步進電機驅動和嵌入式控制器的微型六自由度并聯機器人的制作過程表明:該微型機器人費用較低、技術較先進,適合于本科學生自主制作。通過該實驗項目,可以提高學生實際動手能力和分析問題的能力,同時將控制工程、機器人技術以及單片機等課程理論學習與實踐緊密結合,為實驗教學提供了一種新的教學方法。
(References)
[1]尚銳,王曉明,宛劍業.控制工程基礎課程的實驗方法研究[J].遼寧工業大學學報:社會科學版,2008,10(3):106-108.
[2]蒙艷玫,黃炳瓊,嚴巳杰,等.機械工程控制基礎課程的實驗研究[J].廣西大學學報:自然科學版,2006(增刊1):43-45.
[3]西格德·斯科格斯特德,伊恩·波斯爾思韋特.多變量反饋控制:分析與設計[M].韓崇昭,張愛民,劉曉風,等譯.西安:西安交通大學出版社,2011.
[4]董景新,趙長德,郭美鳳,等.控制工程基礎[M].3版.北京:清華大學出版社,2009.
[5]吳樂彬.基于電液伺服并聯六自由度機構的廣義負載模擬理論和實驗研究[D].杭州:浙江大學,2010.
[6]黃真,孔令富,方躍法.并聯機器人機構學理論及控制[M].北京:機械工業出版社,1997.
[7]美國研制成功“大狗”四足機器人[J].流體傳動與控制,2009(3):56.
[8]新型大狗機器人“阿爾法狗”[J].機械工程師,2012(10):17.
[9]史麗紅.基于Pro/E和ADAMS軟件的少自由度并聯機器人運動學和動力學分析[D].邯鄲:河北工程大學,2010.
[10]黃海忠.DELTA并聯機器人結構參數優化與運動控制研究[D].哈爾濱:哈爾濱工業大學,2013.
[11]Yiu J.ARM Cortex-M3權威指南[M].宋巖,譯.北京:北京航空航天大學出版社,2009.
[12]孔憲文,黃真.3-RPS控制位置用并聯機器人機構的位置反解[J].機械科學與技術,1999(3):84-86.
[13]王力.基于LabVIEW的高速數據采集系統的軟硬件設計[D].南京:南京理工大學,2013.
·寫作小常識·
論文中的斜體
論文中,下列場合的字母用斜體;
1.除pH外的物理量的符號(不論在文字中、還是圖中、還是在表中或作為腳標);
2.腳標字母表示變動數時,或腳標字母表示坐標軸時;
3.表示變量的字母,如:x、y;
4.一般函數符號,如f(x);
5.表示幾何中點、線、面、體、弧的字母;
6.表示坐標的字母,如:球坐標r、θ;
7.矢量、張量和矩陣的符號用黑斜體;
8.化學中表示旋光性、分子構型、構象、取代基位置等的符號。
《實驗技術與管理》編輯部 編錄
Application of parallel robot in experimental teaching of mechanical engineering
Shen Gang,An Zhaohui,Li Xiang,Hou Dongdong,Zhang Dinglong
(Mechanical and Electrical Engineering Institute,China University of Mining and Technology,Xuzhou 222116,China)
In the teaching process of Control Engineering,Robotics and SCM courses,the method of experimental teaching by making full use of six degrees of freedom parallel robot platform can solve the difficult problem effectively,which discusses the application of advanced robot technology in the experimental teaching of mechanical engineering.Based on the specific combination of teaching examples of Control Engineering,Robotics and SCM courses,some researches on the application of six degrees of freedom parallel robot in the foundation of the experimental teaching in Mechanical Engineering are made.Mass data coming out of the explorations and practices show that this method can remarkably improve the students’understanding of the basic theory of Control Engineering,Robotics and SCM courses,also training students ability to inspire a passion for learning basis theoretical effectively.A new approach has been found for the experimental teaching of Control Engineering,Robotics and SCM courses.
experimental teaching;six degrees of freedom parallel robot;control engineering foundation;robotics;SCM
TP242
A
1002-4956(2015)3-0179-04
2014-08-21 修改日期:2014-10-22
沈剛(1982—),男,安徽阜陽,工學博士,副教授,博士生導師,研究領域為電液伺服控制系統、并聯機器人及工業機器人、協調加載系統
安昭輝(1992—),男,河南周口,碩士研究生,主要研究方向為嵌入式控制、并聯機器人和電液伺服控制系統.
E-mail:zhaohui4849@126.com
猜你喜歡
水泥技術(2024年1期)2024-02-01 12:38:46
水泥技術(2023年4期)2023-09-07 08:52:14
機械工程與自動化(2022年5期)2022-10-28 09:57:38
中國機械工程(2022年19期)2022-10-18 12:31:38
中國機械工程(2022年18期)2022-10-08 03:28:24
機械工程與自動化(2022年4期)2022-08-23 15:08:54
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
建材發展導向(2019年11期)2019-08-24 06:35:44
電子制作(2019年9期)2019-05-30 09:42:02
