基于超像素和支持向量機的車輛陰影檢測算法
2015-06-09 20:18:34路小波曾維理
東南大學學報(自然科學版) 2015年3期
朱 周 路小波 衛 朋 曾維理
(1東南大學交通學院, 南京 210096)(2東南大學自動化學院, 南京 210096)(3東南大學復雜工程系統測量與控制教育部重點實驗室, 南京 210096)
?
基于超像素和支持向量機的車輛陰影檢測算法
朱 周1,3路小波2,3衛 朋2,3曾維理2,3
(1東南大學交通學院, 南京 210096)(2東南大學自動化學院, 南京 210096)(3東南大學復雜工程系統測量與控制教育部重點實驗室, 南京 210096)
為解決車輛陰影檢測中易將車輛陰影相似的車輛區域誤檢測為車輛陰影的問題,提出了一種基于超像素和支持向量機的車輛陰影檢測算法.首先,利用簡單線性迭代聚類法將圖像分割為若干超像素;然后,以超像素為基本檢測單位,根據HSV空間中的一組判別條件對車輛陰影進行初步檢測;在此基礎上,利用支持向量機識別并去除被誤檢測為車輛陰影的車輛區域,進而得到最終的車輛陰影.實驗結果表明,所提算法能夠較好地區分車輛陰影及與車輛陰影相似的車輛區域,提高車輛陰影的檢測率和分類率.
陰影檢測;超像素;支持向量機;車輛檢測
視頻車輛檢測能夠提供車輛的形狀、位置信息,是智能運輸系統(ITS)中一項重要的交通信息采集技術.在實際交通場景中,光線被遮擋時會在圖像中產生陰影.車輛陰影可能被檢測為車輛的一部分,也可能將相近的車輛連接在一起,使其被檢測為一輛車.為了準確地檢測車輛,必須對車輛陰影進行檢測和去除[1].學者們已經在陰影檢測方面進行了大量研究.Sanin等[2]將已有的陰影檢測方法按照選取特征的不同分為5類:基于灰度的陰影檢測方法、基于顏色的陰影檢測方法、基于物理的陰影檢測方法、基于幾何的陰影檢測方法和基于紋理的陰影檢測方法.其中,基于灰度的陰影檢測方法往往與其他方法結合使用.在HSV[3]、c1c2c3[4]、YUV[5]、規則化RGB[6]、HMMD[7]等空間中,基于顏色的陰影檢測方法通過設定相應的條件對陰影進行檢測,簡單易行,對噪聲較敏感.基于物理的陰影檢測方法通過建立物理模型來區分陰影和前景,但當陰影和前景的光譜特征相近時方法失效[8-9].基于幾何的陰影檢測方法對陰影與前景之間的幾何關系進行了特定的假設,適用于檢測單一目標的陰影[10].基于紋理的陰影檢測方法通過選取候補陰影區域,并將其與背景區域的紋理進行比較,以確定最終的陰影區域[11].
當前景區域的特征比較一致,且前景區域與陰影區域的特征差別較大時,上述方法通常能夠取得較好的效果.然而,在實際應用中,前景區域的組成較豐富,一部分區域的特征與陰影區域的特征差別較大,另一部分區域(如吸收了大量光線的車窗區域)的特征與陰影區域的特征則較接近,導致其容易被檢測為陰影區域.超像素分割[12]是近年來興起的一種圖像分割方法,它利用圖像特征分布的局部相似性,將圖像分為若干個同質的超像素.以超像素為單位能夠提高特征分析的靈活性.本文提出了一種基于超像素和支持向量機的車輛陰影檢測算法.首先,對圖像進行超像素分割;然后,以超像素為基本單位,利用HSV空間的色度法對陰影區域進行初步檢測,去除與陰影區域區別較明顯的超像素;最后,利用支持向量機識別并去除與陰影區域相似的超像素,得到最終的車輛陰影.
1 超像素分割

5D空間內像素點之間的距離可以通過顏色距離和空間距離加權得到,即
(1)
式中,m為控制超像素大小一致性的參數,且m∈[1,20],m越大則超像素的大小越一致.
SLIC超像素分割算法步驟如下[12]:
① 將圖像轉化至CIELAB顏色空間.
② 按間距S以均勻的方式對第k個超像素的中心點位置Ck={lk,ak,bk,xk,yk}進行初始化.
③ 對超像素中心點Ck而言,計算其3×3鄰域內像素點的梯度,用梯度最小的像素點對中心點位置進行更新.
④ 對每一個像素點而言,按照式(1)計算其與2S×2S范圍之內所有超像素中心點之間的距離,選擇具有最小距離的超像素中心點與之對應.

⑦ 將面積較小的孤立區域的標號用其周圍面積最大的超像素的標號來代替,以增加超像素之間的連通性.
當S=10,m=1時,超像素分割的結果見圖1.由圖可知,陰影超像素和背景超像素之間的分割線基本上與陰影區域和背景區域之間的分割線吻合.當陰影區域與車輛區域邊緣較模糊時會出現一定的誤差(如圖1中最上面的車),但由于單一超像素的尺寸較小,該誤差也較小,相對于由車輛內部與陰影相似區域引起的誤差而言可以忽略不計.
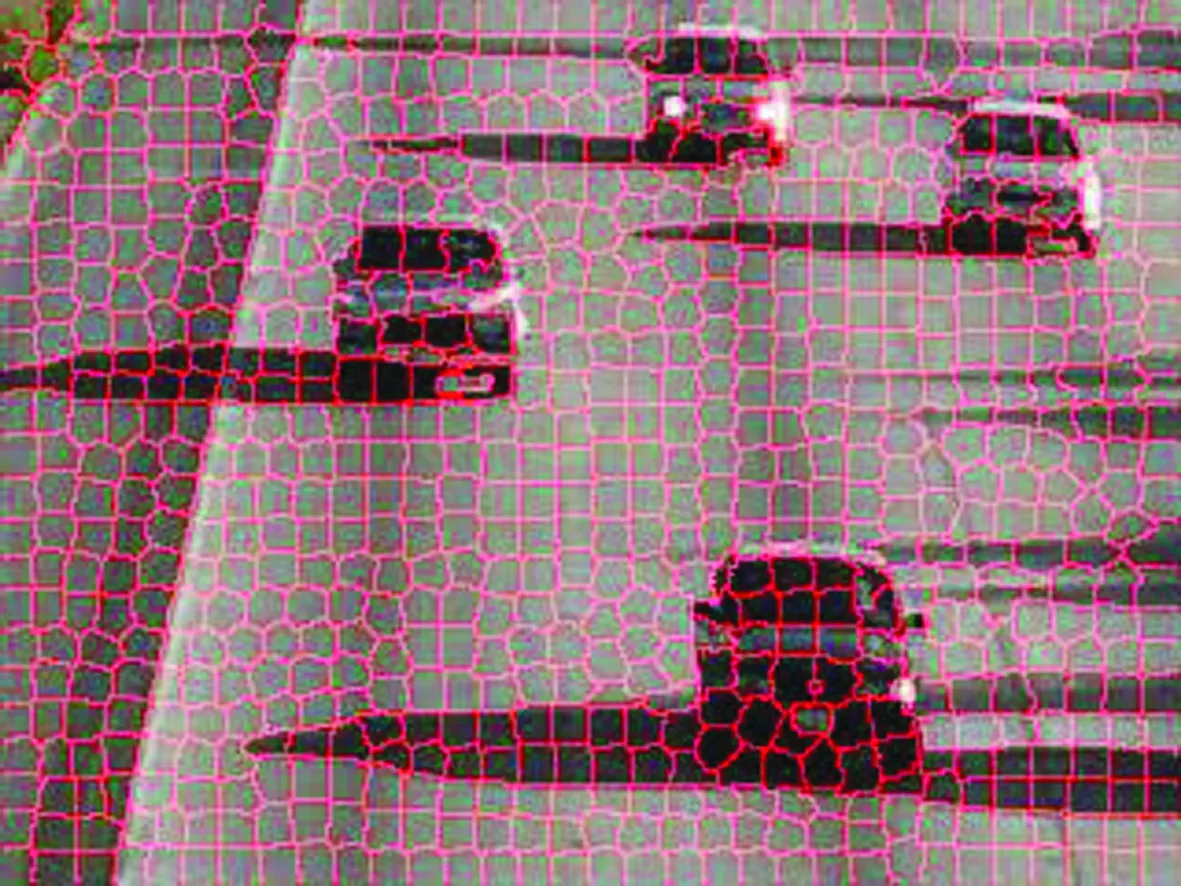
圖1 超像素分割結果
2 初步陰影檢測
下面利用混合高斯背景模型[13]來檢測前景區域,該區域由車輛區域和陰影區域組成.在此前景區域內,以超像素為單位對陰影進行初步檢測.
一般而言,陰影像素點比背景像素點暗,但色度較為接近.根據這一規律,設定超像素p屬于陰影區域的條件為[11]
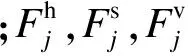
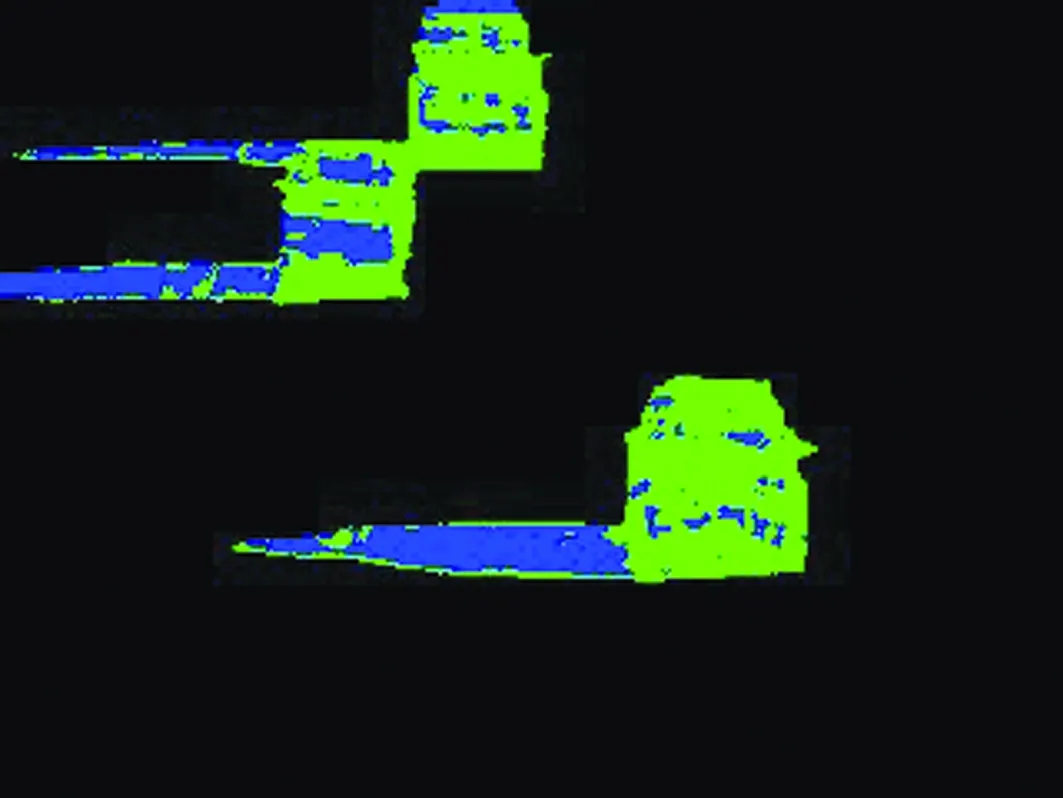
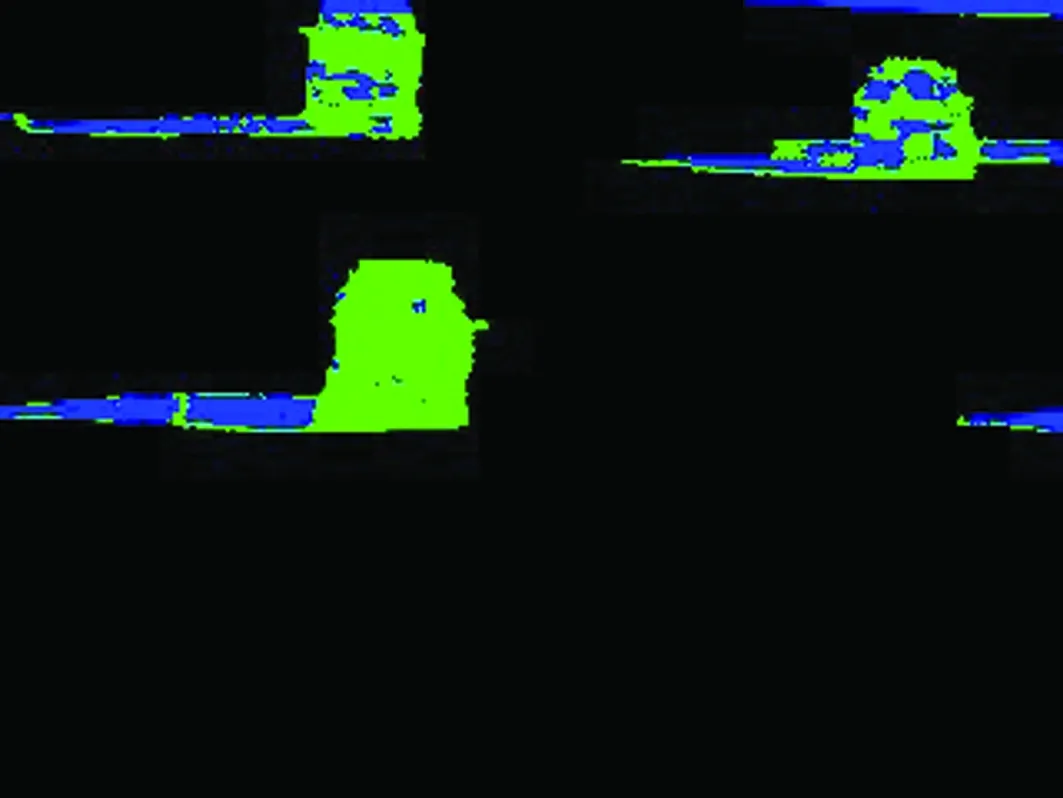
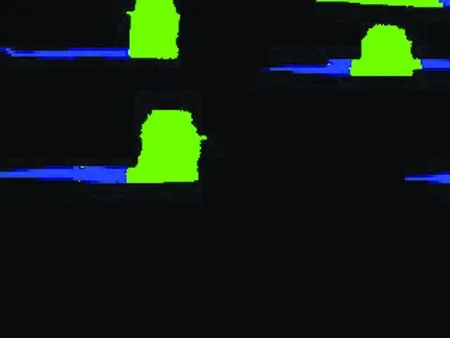
圖2(a)顯示了初步陰影檢測的結果,其中白色區域為檢測到的陰影.從圖中可以看出,陰影區域被準確檢測出來,但同時部分車輛區域也被誤檢測為陰影.圖2(b)對這2種陰影進行了區分,其中綠色區域為被誤檢測為陰影的車輛區域,藍色區域為真實陰影.為了消除誤檢測到的陰影,需要對陰影做進一步精確檢測.
(a) 檢測結果
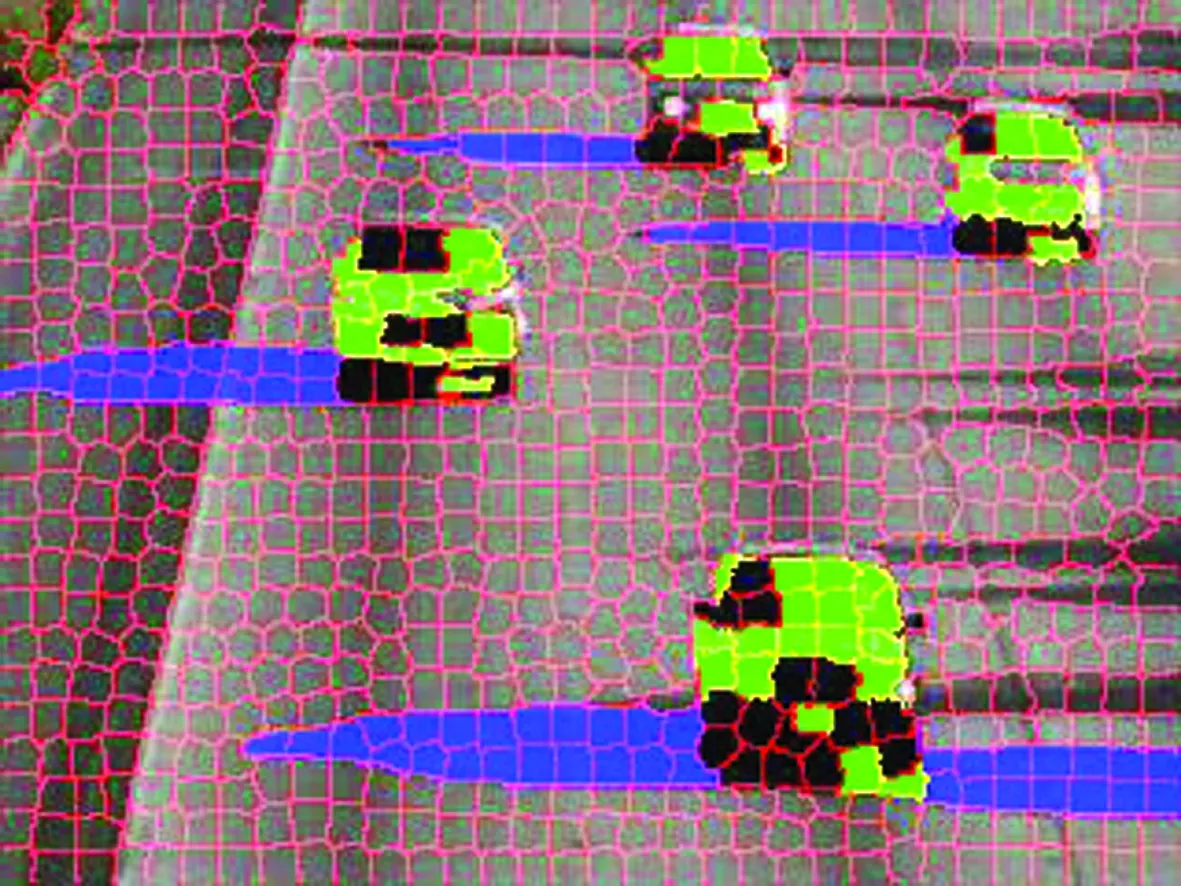
(b) 圖(a)的直觀顯示
3 基于支持向量機的陰影檢測
文獻[14]以像素點為基本單位,利用支持向量機對前景和陰影進行訓練和分類.相比大多數基于顏色的方法,這種方法能夠更加準確地檢測陰影[2].然而,該方法將與陰影區別較大的區域和與陰影相似的區域一起作為樣本進行訓練,可能會把與陰影相似的車輛區域誤判為陰影區域.本文則以超像素為單位,利用支持向量機對陰影區域(見圖2(b)中的藍色區域)和與陰影接近的車輛區域(見圖2(b)中的綠色區域)進行訓練和分類,以將兩者區分開來.

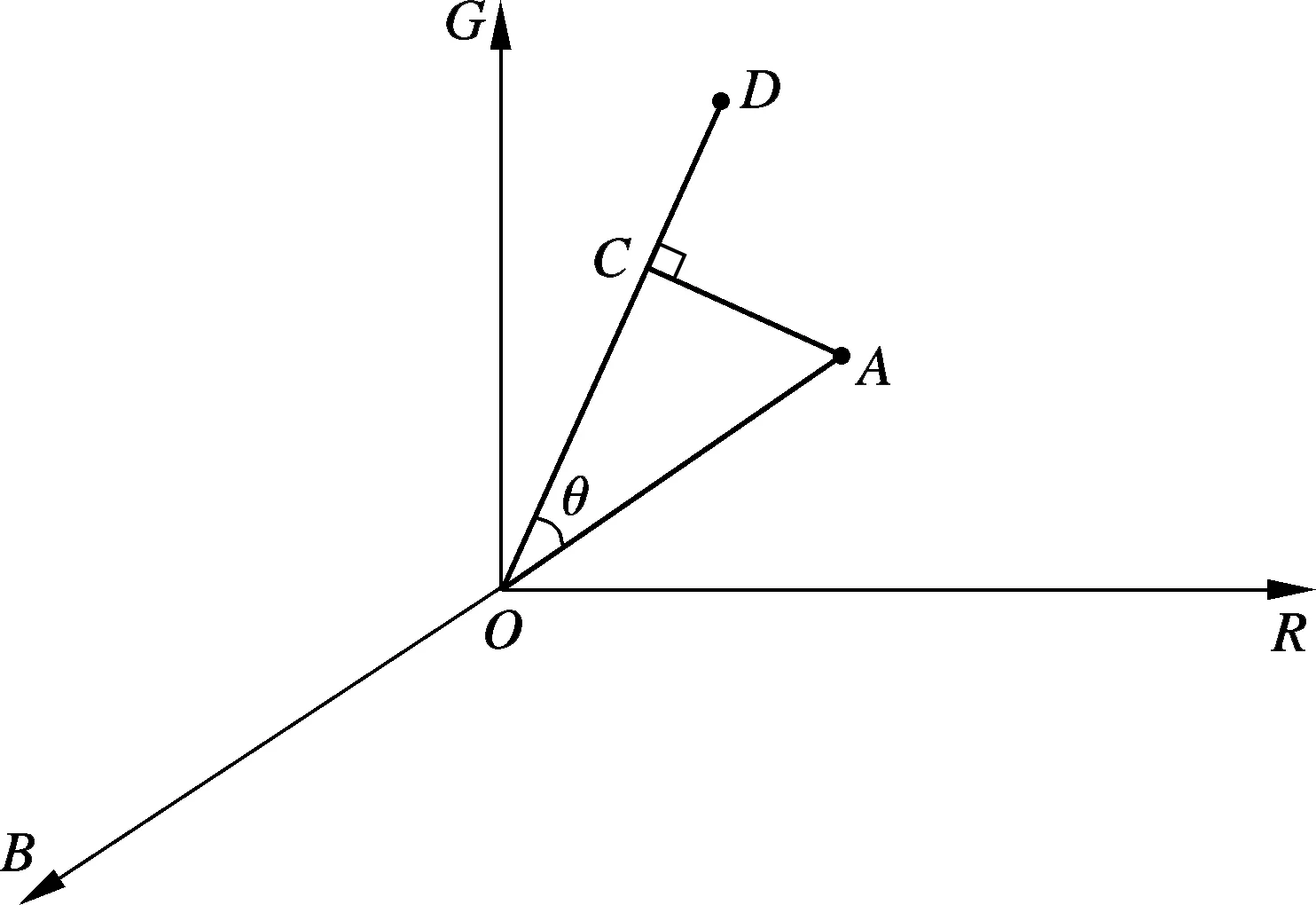
圖3 用于提取特征的RGB顏色模型
其次,定義超像素的特征向量為其所包含的所有像素點的二十維特征向量平均值.為避免受超像素外其他像素點的干擾,先在超像素內部進行腐蝕運算,去除其中的邊緣像素點,再計算腐蝕后留下來的像素點的特征向量.腐蝕運算的結構元素為
(2)
超像素p的特征向量為
(3)

然后,在初始陰影檢測的基礎上以人工方式選擇訓練樣本.如圖2所示,藍色區域的超像素組成了陰影樣本集,綠色區域的超像素組成了與陰影區域類似的前景樣本集.在20幀圖像中采集這2類樣本,其中前景樣本數為543,陰影樣本數為630.按照式(3)提取樣本集中超像素的特征向量,并采用基于高斯核函數的支持向量機對這2類樣本進行訓練,即求解下式:
0≤αp≤Wp=1,2,…,n
(4)
式中,n為樣本的總數量;up∈{-1,1},uq∈{-1,1}分別為超像素p,q的樣本標號;σ為高斯核函數的參數;W為懲罰因子;αp,αq分別為超像素p,q的拉格朗日算子.
式中,b*為截距.
在識別并去除與陰影接近的前景超像素后,剩下的超像素組成了最終的陰影區域.
4 實驗
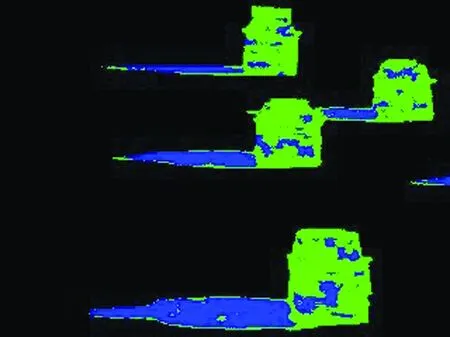
為驗證本文算法的有效性,在Matlab R2011b編程環境下,分別利用本文算法和文獻[14]中的算法對Highway 1數據庫[15]中的車輛陰影進行了檢測.在實驗中,2種算法都采用了20幀圖像用于訓練,并采用另外10幀圖像用于檢測.2組實驗的部分結果見圖4~圖6.為了更好地對2種算法進行比較,沒有對檢測結果進行后續的形態學處理.從圖可知,車輛區域中大量較暗的區域被文獻[14]中的算法誤檢測為陰影,這是因為采用該算法時,車輛區域訓練樣本中同時包含了與陰影區域區別較大的車輛區域和與陰影區域相近似的車輛區域,導致訓練得到的支持向量難以將陰影區域及與陰影區域相似的車輛區域區分開來.采用本文算法時,車輛區域訓練樣本中只包含與陰影區域相近似的車輛區域,故能更有效地區分陰影區域及與陰影區域相似的車輛區域.為了定量比較2種算法的性能,采用文獻[15]中的評價指標對2組實驗結果進行評價,結果見表1.

(a) 原始圖像
(b) 文獻[14]算法結果

(c) 本文算法結果
圖4 第121幀圖像實驗結果

(a) 原始圖像
(b) 文獻[14]算法結果
(c) 本文算法結果

(a) 原始圖像
(b) 文獻[14]算法結果
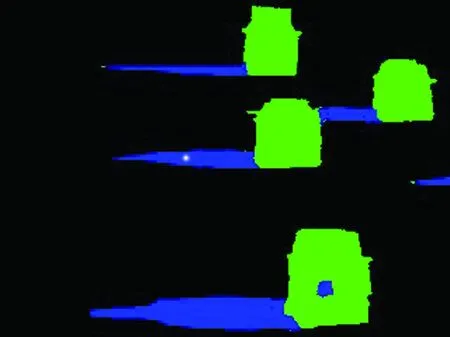
(c) 本文算法結果
陰影檢測率η和陰影分類率ξ的計算公式分別為
式中,T1為10幀測試圖像中被檢測為陰影的總陰影區域面積;F1是被誤檢測為車輛或背景的總陰影區域面積;T2為被檢測為車輛的總車輛區域面積;F2為被檢測為陰影或背景的總車輛區域面積;Z1為真實的總車輛區域面積;Z2為被檢測為陰影的總車輛區域面積.
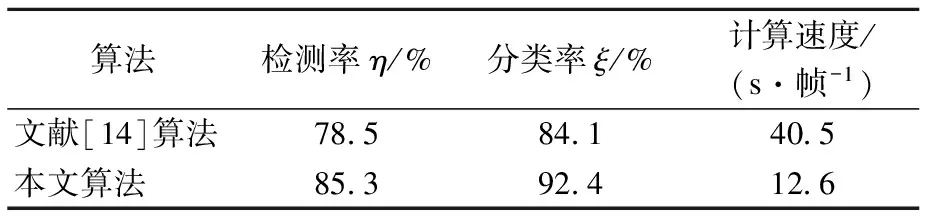
表1 實驗結果的定量比較
陰影檢測率η越大,表示被檢測出的陰影越多;陰影分類率ξ越大,表示被誤檢測為陰影的車輛區域面積越小.由表1可知,相比文獻[14]算法,本文算法提高了陰影檢測率和陰影分類率.此外,本文算法還具有更高的計算效率,這是因為盡管增加了超像素分割以及初步陰影檢測的環節,但是該算法無需對每一個像素進行識別,而只需對每個超像素進行識別,從而大大減少了計算量.
5 結語
在進行車輛陰影檢測時,一部分與陰影區域相近似的車輛區域容易被誤檢測為陰影區域.為了解決這一問題,本文提出了一種結合超像素和支持向量機的車輛陰影檢測算法.在超像素分割的基礎上,以超像素為單位在HSV空間內對車輛陰影進行初步檢測,然后在RGB顏色空間內定義超像素的特征向量,利用支持向量機對陰影區域的超像素及與陰影相似區域的超像素進行訓練和分類,以對車輛陰影進行進一步的檢測.實驗結果表明,本文算法能夠較好地區分車輛陰影及與車輛陰影相似的車輛區域,從而提高車輛陰影檢測的準確性.在HSV空間中進行初步陰影檢測時,本文根據經驗選取了固定閾值,在不同光線環境下如何自動選取合適的閾值仍需進行深入研究.
References)
[1]Xiao M, Han C Z, Zhang L. Moving shadow detection and removal for traffic sequences[J].InternationalJournalofAutomationandComputing, 2007, 4(1): 38-46.
[2]Sanin A, Sanderson C, Lovell B. Shadow detection: a survey and comparative evaluation of recent methods[J].PatternRecognition, 2012, 45(4):1684-1695.
[3]Cucchiara R, Grana C, Piccardi M, et al. Detecting moving objects, ghosts and shadows in video streams[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2003, 25(10): 1337-1342.
[4]Salvador E, Cavallaro A, Ebrahimi T. Cast shadow segmentation using invariant color features[J].ComputerVisionandImageUnderstanding, 2004, 95(2): 238-259.
[5]Chen C T, Su C Y, Kao W C. An enhanced segmentation on vision-based shadow removal for vehicle detection[C]//2010InternationalConferenceonGreenCircuitsandSystems. Shanghai, China, 2010: 679-682.
[6]Cavallaro A, Salvador E, Ebrahimi T. Shadow-aware object-based video processing[J].IEEProceedings—Vision,ImageandSignalProcessing, 2005, 152(4): 398-406.
[7]Mao Y F, Shi P F. Multimodal background model with noise and shadow suppression for moving object detection[J].JournalofSoutheastUniversity:EnglishEdition, 2004, 20(4):423-426.
[8]Huang J B, Chen C S. Moving cast shadow detection using physics-based features[C]//2009IEEEConferenceonComputerVisionandPatternRecognition. Miami, FL, USA, 2009: 2310-2317.
[9]Martel-Brisson N, Zaccarin A. Kernel-based learning of cast shadows from a physical model of light sources and surfaces for low-level segmentation[C]//2008IEEEConferenceonComputerVisionandPatternRecognition. Anchorage, AK, USA, 2008: 1-8.
[10]Fang L Z, Qiong W Y, Sheng Y Z. A method to segment moving vehicle cast shadow based on wavelet transform[J].PatternRecognitionLetters, 2008, 29(16):2182-2188.
[11]Cucchiara R, Grana C, Piccardi M, et al. Detecting objects, shadows and ghosts in video streams by exploiting color and motion information[C]//Proceedingsof11thInternationalConferenceonImageAnalysisandProcessing. Palermo, Italy, 2001: 360-365.
[12]Achanta R, Shaji A, Smith K, et al. SLIC superpixels compared to state-of-the-art superpixel methods[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2012, 34(11):2274-2282.
[13]Stauffer C, Grimson W E L. Adaptive background mixture models for real-time tracking[C]//1999IEEEComputerSocietyConferenceonComputerVisionandPatternRecognition. Fort Collins, CO, USA, 1999,2:246-252.
[14]Joshi A J, Papanikolopoulos N P. Learning to detect moving shadows in dynamic environments[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2008, 30(11):2055-2063.
[15]Prati A, Mikic I, Trivedi M M, et al. Detecting moving shadows: algorithms and evaluation[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2003, 25(7):918-923.
Vehicle shadow detection algorithm based on superpixel and SVM
Zhu Zhou1,3Lu Xiaobo2,3Wei Peng2,3Zeng Weili2,3
(1School of Transportation, Southeast University, Nanjing 210096, China) (2School of Automation, Southeast University, Nanjing 210096, China) (3Key Laboratory of Measurement and Control of Complex Systems of Engineering of Ministry of Education, Southeast University, Nanjing 210096, China)
To solve the problem that the vehicle region similar to the shadow is apt to be wrongly detected as the shadow during vehicle shadow detection, a vehicle shadow detection algorithm based on superpixel and SVM(support vector machine) is proposed. First, the current image is segmented to several superpixels by the simple linear iterative clustering method. Then, according to a group of criterion conditions in HSV(hue, saturation, value) space, the vehicle shadow is detected preliminary by taking superpixels as basic testing units. Finally, the vehicle region which is detected wrongly as the vehicle shadow is recognized by SVM and removed from the preliminary detection results, thus the final vehicle shadow is obtained. The experimental results show that the proposed method can well distinguish the shadow from the vehicle region similar to the shadow, and can improve the detection rate and the discrimination rate of the vehicle shadow.
shadow detection; superpixel; support vector machine; vehicle detection
10.3969/j.issn.1001-0505.2015.03.006
2014-11-10. 作者簡介: 朱周(1984—),男,博士生;路小波(聯系人),男,博士,教授,博士生導師,xblu2013@163.com.
國家自然科學基金資助項目(61374194,61403081).
朱周,路小波,衛朋,等.基于超像素和支持向量機的車輛陰影檢測算法[J].東南大學學報:自然科學版,2015,45(3):443-447.
10.3969/j.issn.1001-0505.2015.03.006
U491.1
A
1001-0505(2015)03-0443-05
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
