某型混合動力汽車協調換擋控制策略的研究*
2015-06-09 22:42:18梁俊毅張建龍殷承良
汽車工程 2015年12期
梁俊毅, 張建龍, 殷承良
(上海交通大學,汽車電子控制技術國家工程實驗室,上海 200240)
?
2015231
某型混合動力汽車協調換擋控制策略的研究*
梁俊毅, 張建龍, 殷承良
(上海交通大學,汽車電子控制技術國家工程實驗室,上海 200240)
本文針對一款裝有機械式自動變速器和后驅電機的混合動力汽車開發了協調換擋控制策略,對車輛沖擊和離合器摩擦損失進行優化。控制策略將換擋過程分為發動機主動調速、離合器接合和恢復并聯驅動3個階段。采用模糊PID控制器和模糊控制器分別進行發動機轉速調節和離合器接合速度調節,并用電機對動力系統轉矩波動進行補償。仿真和臺架試驗結果,采用雖然該協調控制策略雖然換擋時間相對延長,但能同時減小車輛沖擊和離合器摩擦損失,將沖擊度控制在±4 m/s3范圍內,并只產生很小的離合器摩擦損失,汽車的換擋品質得到明顯改善。
混合動力汽車;協調換擋控制策略;車輛沖擊度;離合器摩擦損失
前言
隨著環境污染的逐步加劇和能源問題的日益凸顯,汽車工業界和研究機構紛紛加大了對新能源汽車的研發力度。混合動力汽車(HEV)由于采用與傳統車輛類似的結構和對基礎設施的良好適應性,因此被認為是中短期內一個較好的選擇方案[1]。
目前,關于HEV瞬態協調控制的研究內容相對集中于模式切換(如由純電動模式切換至混合驅動模式)[2-3],而針對換擋時瞬態協調控制的研究相對較少[4-5]。研究人員在針對HEV換擋進行優化時通常需要同時兼顧幾個目標,包括換擋時間、離合器磨損和車輛沖擊度。這幾個優化目標常常相互制約:較快的換擋需要加快離合器的接合,以減少動力中斷和離合器磨損,但可能導致較大的車輛沖擊。而要提高駕乘舒適性,需要相對延長換擋時間,可能導致更多的離合器磨損。
之前的研究通常采用加權目標函數對沖擊度和離合器磨損進行折中優化[6],或忽略磨損而集中優化HEV車輛沖擊度[7],很難同時實現兩個目標的優化。本文中針對一款發動機及變速器集成于前驅動軸,電機集成于后驅動軸的HEV進行研究,設計了針對1擋升2擋的換擋協調控制策略。由于采用后置電機結構,在換擋時電機可持續提供車輛行駛所需功率。因此,動力中斷問題得以解決,換擋時間可以相對延長以減小車輛沖擊并通過發動機主動調速來減少離合器的磨損。
模糊邏輯控制器為非線性、時變、動態和延時系統提供有效的控制,因為它能方便地獲取人類認知中近似和定性概念,并將推理機制引入控制器中[8]。本文中采用模糊PID控制器和模糊控制器分別控制換擋時的發動機轉速調節和離合器接合速度調節,以期獲得較好的協調控制品質。
1 HEV混合動力系統架構
本文中所研究的并聯式HEV主要針對中低端市場,其動力性能見表1[9]。
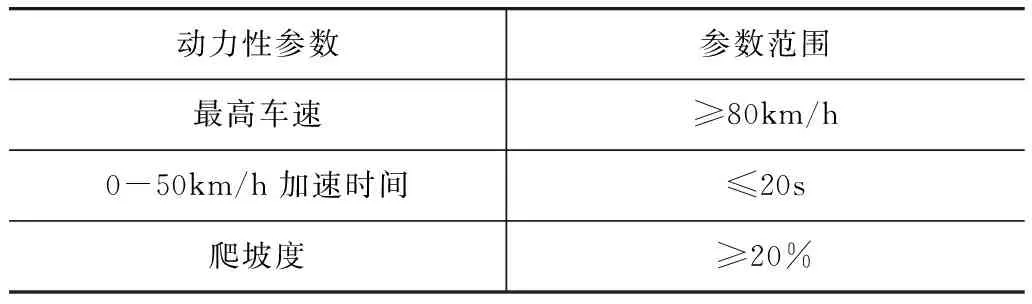
表1 并聯式HEV動力性能參數
該并聯式HEV的動力系統采用發動機與自動機械變速器(AMT)置于前驅以及電機置于后驅的結構,如圖1所示。HEV的系統參數見表2。
2 換擋過程動力學方程
混合動力汽車動力系統是復雜的非連續系統。為了簡化分析,將動力系統各部件假設為集中慣量部件。本文中著重分析與換擋過程相關的動力學方程。
如圖1所示,由于發動機通過離合器與變速器輸入軸相連,故換擋過程中(在離合器完全接合前)前驅動的動力學方程可表達為
(1)
式中:Jeng為發動機系統的慣量;ωeng為發動機的角
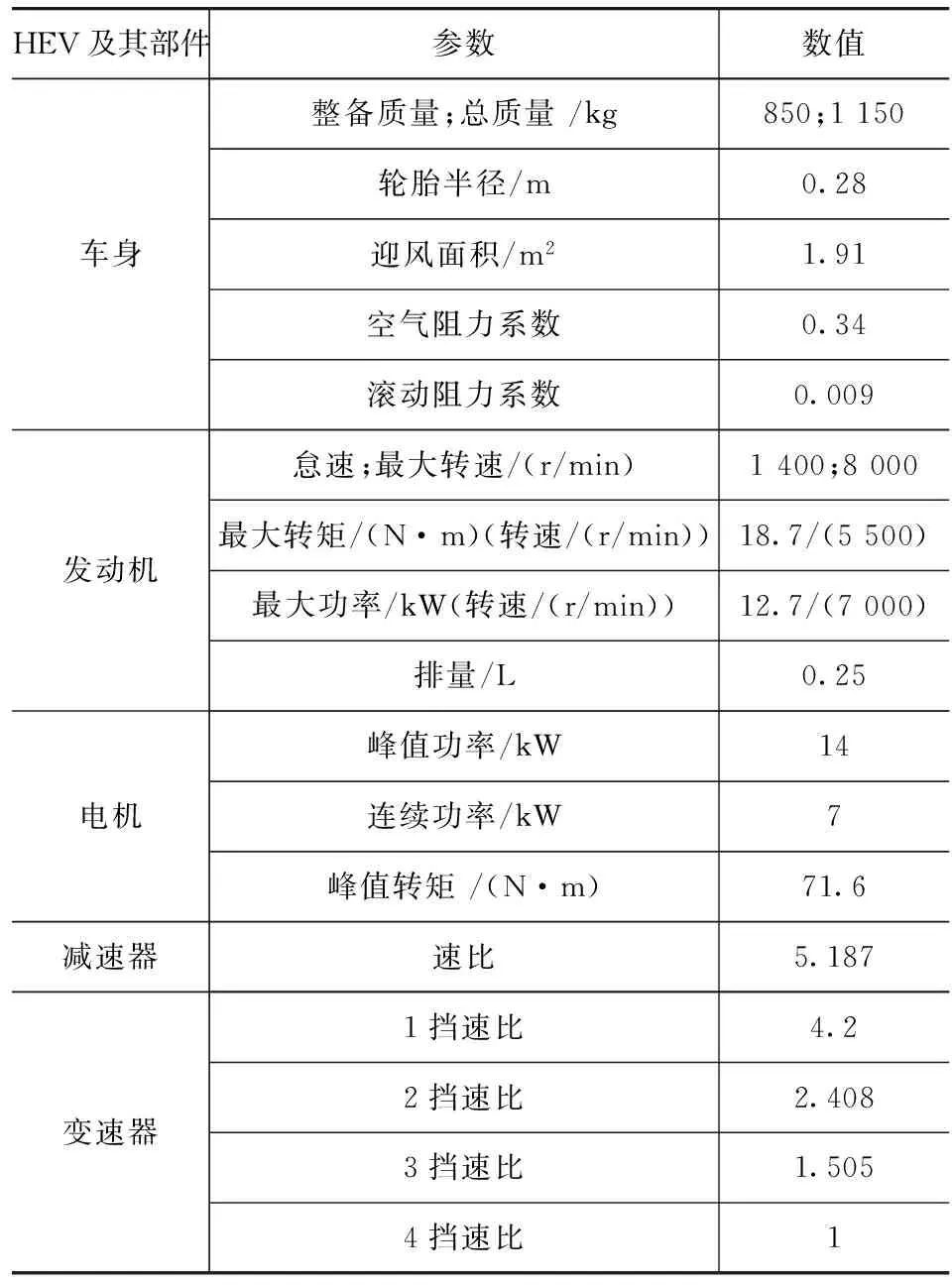
表2 并聯式HEV動力性能參數
速度,rad/s;Teng為發動機的輸出轉矩,其值等于發動機的指示轉矩Teng_i減去發動機阻力轉矩Tres;Tclt為離合器傳遞的轉矩。Tres可表示為[10]
(2)
式中:Vd為發動機的排量,m3;neng為發動機轉速,r/min; vp為發動機活塞的平均速度,m/s。
在AMT系統中通常使用干式離合器。換擋過程中干式離合器有分離、滑摩和完全接合3種狀態。對應不同狀態離合器傳遞轉矩的方程為
(3)式中:Tclt_out和ωclt_out為離合器的輸出轉矩和角速度;Tclt_in和ωclt_in為離合器的輸入轉矩和角速度;μst和μsl為離合器摩擦盤的靜態和滑動摩擦因數;Rcl為等效摩擦半徑,m;Fn為作用在摩擦盤上的法向力;N為摩擦面數。
考慮到變速器軸存在剛度和阻尼特性,故其動力學方程為
(4)

3 協調換擋控制策略
本文中針對目標HEV車型1擋至2擋的升檔過程進行協調控制優化。由于換擋過程中離合器的狀態改變,該換擋過程可分為3個連續的階段。每個階段都有設計針對性的控制策略來實現最終車輛沖擊度和離合器磨損的優化。在換擋指令發出前,HEV工作在并聯混合驅動模式,此時前軸的發動機和后軸的電機共同驅動車輛。在換擋指令發出后,離合器開始分離而發動機到變速器輸入軸的動力鏈斷開。此時,位于后軸的電機可持續提供車輛所需的功率,從而避免了動力完全中斷。在此情況下,離合器的分離時間可以相對延長,發動機可以進行主動調速而減少離合器磨損。
換擋的3個階段和切換條件如圖2所示。為方便,本節中發動機和離合器的旋轉速度改用轉速n(r/min)表示;與第2節中的角速度ω(rad/s)的關系為n=30/π(對所有下標有效)。當離合器輸入端和輸出端的相對轉速nclt_dif降低至門限值nII_entry時,換擋過程進入第二階段,離合器開始接合并產生滑摩。當nclt_dif降低至某一較小的門限值nIII_entry時,換擋過程進入第三階段,離合器完全接合,HEV重新進入混合驅動狀態。

由于換擋過程中不同階段的車輛部件動力學狀態會發生變化,因此本文中針對不同階段分別設計了對應的控制方法,具體詳述如下。
3.1 第一階段:發動機主動調速
當換擋命令發出后,離合器開始分離以完成擋位切換。在傳統車輛中,為避免長時間的動力中斷,離合器分離時間較短并很快開始重新接合。本文中所研究的HEV結構中,置于后軸的電機可以持續提供驅動功率。因此,離合器的分離時間可以相對延長。此時,式(1)中的離合器轉矩Tclt為0,發動機可以通過調整節氣門開度來進行主動調速。由于1擋與2擋速比不同,在主動調速的最初階段,發動機轉速neng要遠高于下一擋位對應的目標轉速neng_t。
發動機轉速的調節由調整節氣門位置αtht來實現。經典的PID控制器被用于實現αtht的調節。因為節氣門的位置不會發生突變,因此在設計PID控制器時,將節氣門開度的變化量Δαtht作為PID控制器的輸出,其表達式為
(5)
式中:e=neng_t-neng為發動機目標轉速與實際轉速的差值;Kp,KI和KD分別是比例、積分和微分系數。由于發動機和離合器的強非線性動態過程,普通的PID控制器有可能不能滿足追蹤精度和相應速度的要求。因此,本文中采用模糊控制器對PID參數進行調節來增強控制器的性能。模糊控制器的設計方法與文獻[7]類似,本文中不再詳述。
3.2 第二階段:離合器結合
當nclt_dif小于門限值nII_entry時,換擋過程進入第二階段而此時離合器開始接合。在這個階段,離合器的接合須要仔細控制以減小車輛沖擊和離合器的摩擦損失。離合器的摩擦損失由離合器滑摩過程中耗散的能量來表征:
(6)
式中:tsilp為離合器滑摩的時間。在這個階段,離合器轉矩Tclt的增加與離合器的接合速度有關。另一方面,實驗表明離合器的摩擦損失與滑摩時間呈正相關[6]。因此,離合器過快的接合會引起傳動系較大的轉矩波動而影響駕乘舒適性,而太慢的離合器接合速度則會造成較多的離合器磨損。

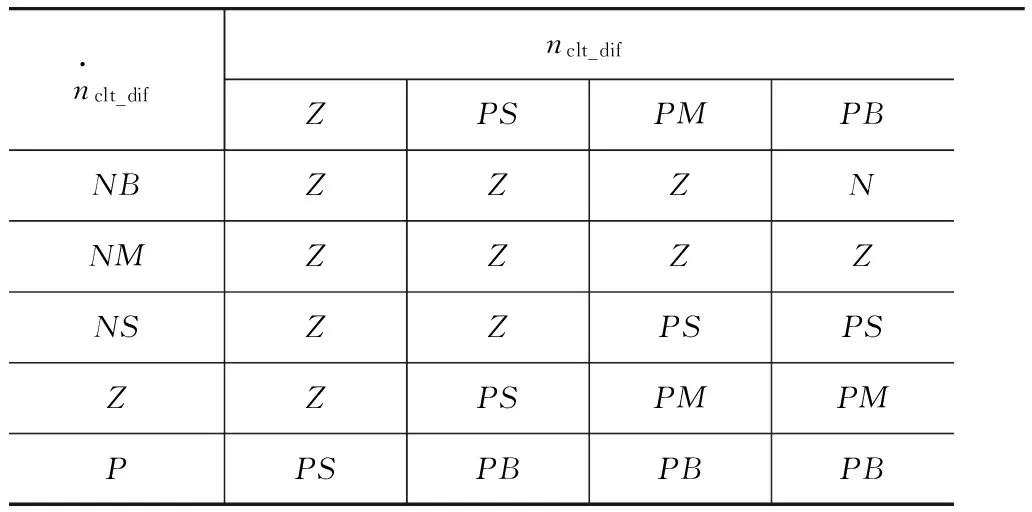
表3 離合器接合速度模糊邏輯規則表
3.3 第三階段:恢復并聯驅動
當nclt_dif降低至一很小的值nIII_entry時,換擋過程進入第三階段而離合器完全接合。發動機重新接入傳動系與電機一同驅動車輛。由于發動機動態響應速度相對較慢,則控制發動機轉矩Teng逐漸增加至其高效率轉矩曲線,而電機同時提供輔助功率保證駕駛員的駕駛需求。
4 仿真分析
在Matlab/Simulink仿真平臺上建立了混合動力汽車的動力學仿真模型和換擋協調控制策略,并根據ECE工況選取一段典型加速曲線,如圖4所示。采用設計的協調控制策略和未進行協調控制的策略進行仿真。需要說明的是,考慮到換擋過程中電機的功率有可能不能滿足此時駕駛員的需求,因而根據換擋時電機功率是否滿足當前駕駛需求而設置兩個不同的離合器接合階段門限值nII_entry。若電機功率可以滿足當前駕駛需求,則設置較小的nII_entry值,使發動機主動調速階段相對較長;若電機功率不能滿足當前駕駛需求,則設置較大的nII_entry值,使發動機主動調速階段較短而縮短整個換擋過程,但此時可能產生一定的換擋沖擊和離合器磨損。表4中是有協調控制策略在兩種情況下和無協調控制策略進入不同階段所對應的門限值。仿真對比結果如圖5所示。
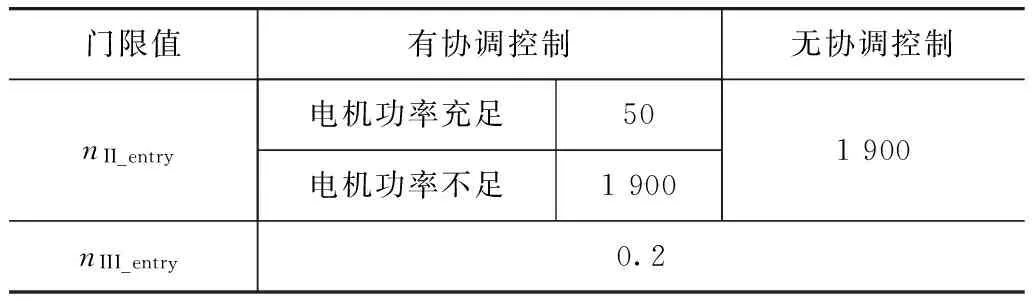
門限值有協調控制無協調控制nII_entry電機功率充足50電機功率不足19001900nIII_entry0.2
如圖5(a)所示,當采用協調控制方法時,車速曲線能較好地跟蹤目標曲線,此時電機功率充足,選用的離合器接合門限值nII_entry=50r/min,發動機主動調速過程相對較長,如圖5(c)所示。而未采用協調控制方法時,車速在換擋過程中出現了波動。如圖5(b)所示,1擋升2擋的換擋過程被分為3個階段,分別由縱軸的1,2,3數字所表征。未采用協調控制時,第一階段(離合器分離)時間相對較短而很快進入第二階段(離合器接合)。在離合器接合過程中,由于滑摩轉矩的作用,發動機的轉速快速趨近于第二擋的目標轉速,如圖5(c)所示,因而換擋時間相對較短。采用協調控制時,第一階段發動機主動調速的時間相對較長,而當發動機轉速降低至nII_entry=50r/min時,換擋進入第二階段,此時發動機轉速與目標轉速已經相差不大,因而換擋第二階段很快結束并進入第三階段。兩種控制方法的換擋時間如表5所示。無協調控制換擋時間與傳統換擋時間類似,而有協調控制時間相對較長。
發動機轉矩、電機轉矩和離合器輸出轉矩的變化曲線如圖5(d)~圖5(f)所示。在換擋發生后,控制策略對發動機節氣門開度進行調節而使發動機轉矩下降,此時離合器處于分離狀態而沒有轉矩輸出。有協調控制的電機轉矩迅速補償由于離合器中斷造成的轉矩波動(如圖5(e)中實線表示),而無協調控制的電機響應則很慢,在車速發生變化后才有一定的補償轉矩輸出(如圖5(e)中虛線表示)。對比圖5(e)和圖5(f)可見,有協調控制的電機轉矩能較好地補償離合器的轉矩輸出,從而減小動力系統的轉矩波動;而無協調控制的電機轉矩則補償原定的發動機優化轉矩,因此無法很好地補償離合器的轉矩波動,造成動力系統的沖擊。
兩種控制方法造成的離合器摩擦損失和車輛沖擊如圖5(g)和圖5(h)所示。由于無協調控制方法的換擋過程很早就進入離合器接合滑摩階段,因此離合器的摩擦損失較高;而有協調控制的離合器滑摩時間很短,此時的發動機轉速差也很小,因此產生的離合器摩擦損失也很小。無協調控制的電機轉矩沒有實現對離合器轉矩的補償,因此車輛產生了較大的沖擊;而有協調控制的電機轉矩對離合器轉矩的補償較好,因而將沖擊度控制在很小的一個范圍內(±2.5 m/s3),符合德國的沖擊度推薦標準(<10 m/s3)。離合器摩擦損失和車輛沖擊度的具體數值如表6所示。采用協調控制后,離合器摩擦損失和車輛沖擊度比無協調控制分別降低了99.98%和92.07%。

表6 仿真換擋沖擊度和離合器摩擦損失對比
5 臺架試驗分析
5.1 臺架試驗系統
為進一步驗證設計控制策略的有效性,搭建了如圖6所示的混合動力系統臺架。試驗臺架中,數據采集與控制系統負責數據的采集及工況加載等,實時仿真平臺用于下載仿真模型及控制策略并對外發出控制信號。本臺架共采用了5個測功機:0號測功機用于模擬發動機;1,2號測功機模擬前輪;3,4號測功機模擬后輪。后置電機與3,4號測功機相連組成后輪驅動結構。電機的轉矩控制由控制系統通過CAN網絡實現,而控制系統將執行機構控制信號送入變速器完成變速器的實時控制。
5.2 試驗結果分析
在搭建的混合動力試驗臺架上對設計的協調控制策略進行驗證,采用圖4中加速曲線,用有協調控制和無協調控制方法分別進行了1擋升2擋的試驗。
由于試驗過程中的離合器滑摩功難以獲得,故采用滑摩角表示離合器的摩擦損失。滑摩角是指離合器從動摩擦片和主從動摩擦片在滑摩過程中二者相對轉過的角度。圖7(a)中所示的有協調控制過程中,當離合器分離后,電機可迅速補償車輛需求轉矩,因而車輛的動力性得到保證,車輛的沖擊度控制在[-4,+2]m/s3范圍內。而圖8(a)所示的無協調控制過程中,電機轉矩沒有迅速補償車輛需求轉矩,結果車輛出現沖擊,沖擊度約為[-20,+15]m/s3,超出了德國沖擊度的推薦標準,會引起駕乘人員的不適感。沖擊度和滑摩角的具體數值列在表7中,由于無協調控制很早就進入離合器滑摩過程,所以其產生的滑摩角也比有協調控制大很多。有協調控制時的滑摩角和沖擊度比無協調控制時分別降低了74.67%和85.34%。
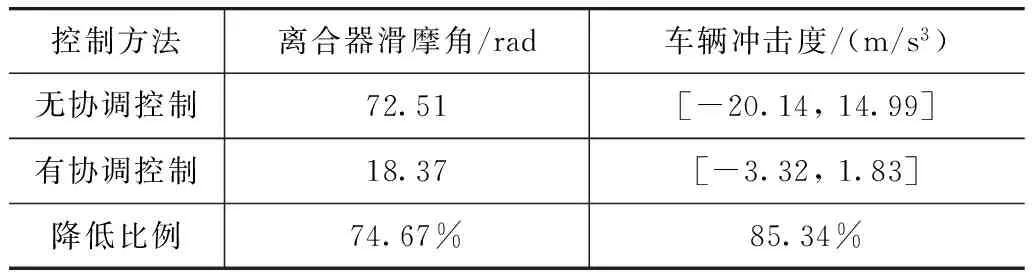
控制方法離合器滑摩角/rad車輛沖擊度/(m/s3)無協調控制72.51[-20.14,14.99]有協調控制18.37[-3.32,1.83]降低比例74.67%85.34%
6 結論
本文中針對一款裝備了AMT和后置電機的混合動力汽車設計了協調換擋控制策略。控制策略將換擋過程分為發動機主動調速、離合器接合和恢復并聯驅動3個階段。采用電機實時補償動力系統轉矩波動的方式,可以相對延長換擋時間。采用模糊PID控制器和模糊控制器對發動機轉速和離合器接合速度進行調節,用于降低前驅動軸轉矩波動。仿真和臺架試驗結果表明,與無協調控制策略的換擋策略相比,該換擋協調控制策略可以顯著減小車輛沖擊和離合器的磨損,能有效提高該型混合動力汽車的換擋品質。
[1] Ehsani M, Gao Y, Emadi A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles[M]. CRC Press,2009.
[2] Koprubasi K, Westervelt E, Rizzoni G. Toward the Systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes[C].American Control Conference, ACC′07, 2007: IEEE.
[3] Kim H, Kim J, Lee H. Mode Transition Control Using Disturbance Compensation for a Parallel Hybrid Electric Vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2011, 225(2): 150-166.
[4] 王洪亮, 劉海鷗, 關超華, 等. 重型車輛 AMT 換擋過程控制方法研究[J].汽車工程, 2009,31(6): 540-544.
[5] 秦大同, 杜波, 段志輝, 等. 某型混合動力汽車AMT換擋控制策略的研究[J].汽車工程, 2013, 35(11): 1004-1010.
[6] Gu Yanchun, Yin Chengliang, Zhang Jianwu. Optimal Torque Control Strategy for Parallel Hybrid Electric Vehicle with Automatic Mechanical Transmission[J]. Chinese Journal of Mechanical Engineering(English Edition), 2007,20(1): 16-20.
[7] Zhu Futang, Chen Li, Yin Chengliang, et al. Dynamic Modelling and Systematic Control During the Mode Transition for a Multi-mode Hybrid Electric Vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013,227(7): 1007-1023.
[8] 吳志偉, 張建龍, 殷承良. 混合動力汽車用混合能量存儲系統的設計[J].汽車工程, 2012,34(3): 190-196.
[9] Liang Junyi, Zhang Jianlong, Zhang Xi, et al. Energy Management Strategy for a Parallel Hybrid Electric Vehicle Equipped with a Battery/Ultra-capacitor Hybrid Energy Storage System[J].Journal of Zhejiang University Science A, 2013,14(8): 535-553.
[10] 歐陽明高, 李建秋, 楊福源, 等. 汽車新型動力系統:構型、建模與控制[M]. 北京: 清華大學出版社,2008.
A Study on the Coordinated Shift Control Strategy fora Hybrid Electric Vehicle
Liang Junyi, Zhang Jianlong & Yin Chengliang
ShanghaiJiaoTongUniversity,NationalEngineeringLaboratoryforAutomotiveElectronicControlTechnology,Shanghai200240
A coordinated gear shifting control strategy for a hybrid electric vehicle equipped with automated mechanical transmission and a rear drive motor is developed to optimize vehicle jerk and clutch friction loss. With the control strategy, the shifting process is divided into engine speed active regulation, clutch engagement and engine speed recovery three phases. Fuzzy PID and fuzzy controllers are adopted to regulate engine speed and clutch engaging speed respectively with the torque fluctuation of powertrain compensated by electric motor. Simulation and bench test results indicate that the adoption of coordinated control strategy, though relatively extending shift time, can concurrently reduce the vehicle jerk and clutch friction loss, with a shift jerk limited within ±4 m/s3and only a little clutch friction loss, apparently improving the shift quality of vehicle.
HEV; coordinated shift control strategy;vehicle jerk;clutch friction loss
*面向中美清潔能源合作的電動汽車前沿技術研究項目(2010DFA72760)資助。
原稿收到日期為2014年5月29日,修改稿收到日期為2014年8月21日。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
