線性回歸模型在控制系統分析中的應用
2015-05-30 09:57:55申貝貝
數學學習與研究 2015年13期
申貝貝

【摘要】應用線性回歸建立輸出量與輸入量之間的函數模型,并采用反向分析法,在確定輸出量的情況下,分析輸入量允許的偏差范圍及具體操作過程.使用拉普拉斯變換及反變換對控制系統中各環節的微分方程進行推算,從而得出預設變量之間的函數模型,進而為問題的解決找到突破口.
【關鍵詞】線性回歸;反向分析;拉普拉斯變換
在探索兩個量之間存在何種關系時,經常采用的方法是,由這兩個量為有序實數對,建立它們的散點分布圖,通過散點的分布估計這兩個量之間的關系.如果散點分布整體上呈現一次線性方程的趨勢,即所統計的散點沿一條直線分布時,就可以使用線性回歸方程,建立兩變量之間的一次函數模型.在此,觀測記錄輸出水溫T和輸入量閥門旋轉角α,應用線性回歸建立輸出量與輸入量之間的函數模型,并采用反向分析法,在確定輸出量的情況下,分析輸入量允許的偏差范圍及具體操作過程.
假設100℃的熱水和5℃的冷熱水按體積1∶1的比例混合輸出時,水溫應在52.5℃,但因多種因素的影響,輸出水溫在55℃,此時需要調節冷水閥,增加冷水的輸入.若對照輸出水溫顯示器,發現在增加熱水時,水溫又降低,低于52.5℃,則應停止增加冷水,開始調節熱水閥,增加熱水的輸入.若增加的熱水量相當之前輸入冷水的量,很可能溫度又回復到55℃,因此為了減少反復調節,在第一次輸入冷水時,就有所控制地增加冷水量,同樣,在第二次輸入熱水時,應對照增加的冷水控制參數來控制熱水的輸入量.其中對于冷熱水的調節環節,采用旋轉閥門來進行.順時針旋轉增加熱水的輸入量,逆時針旋轉增加冷水的輸入量.因此,閥門旋轉的角度大小,直接表示輸出水溫的大小.接下來探索旋轉角α和輸出水溫T之間的關系,建立函數模型T=T(α).
旋轉角α和輸出水溫T之間的函數關系是T=a+bα(a,b為待定常數).觀察(α,T)樣本,記錄樣本點:(α1,T1),(α2,T2),(α3,T3),…,(αn,Tn),在直角坐標系αOT下描出每個樣本點的散點圖,如圖1所示.
由上述線性回歸方程和誤差e的概率分布所得到的分析結果顯示,當旋轉角α在區間α--3σ,α-+3σ范圍內取值時,獲得溫度為T的水.根據這一分析結果,設計一條反向分析思路:先確定輸出水溫目標值T,再進一步探索影響旋轉角α輸出區域的各種因素.將每一種因素作為自變量,建立以旋轉角α為因變量的數學模型.在此以下面的自動控制系統為例來說明這一設計思路.
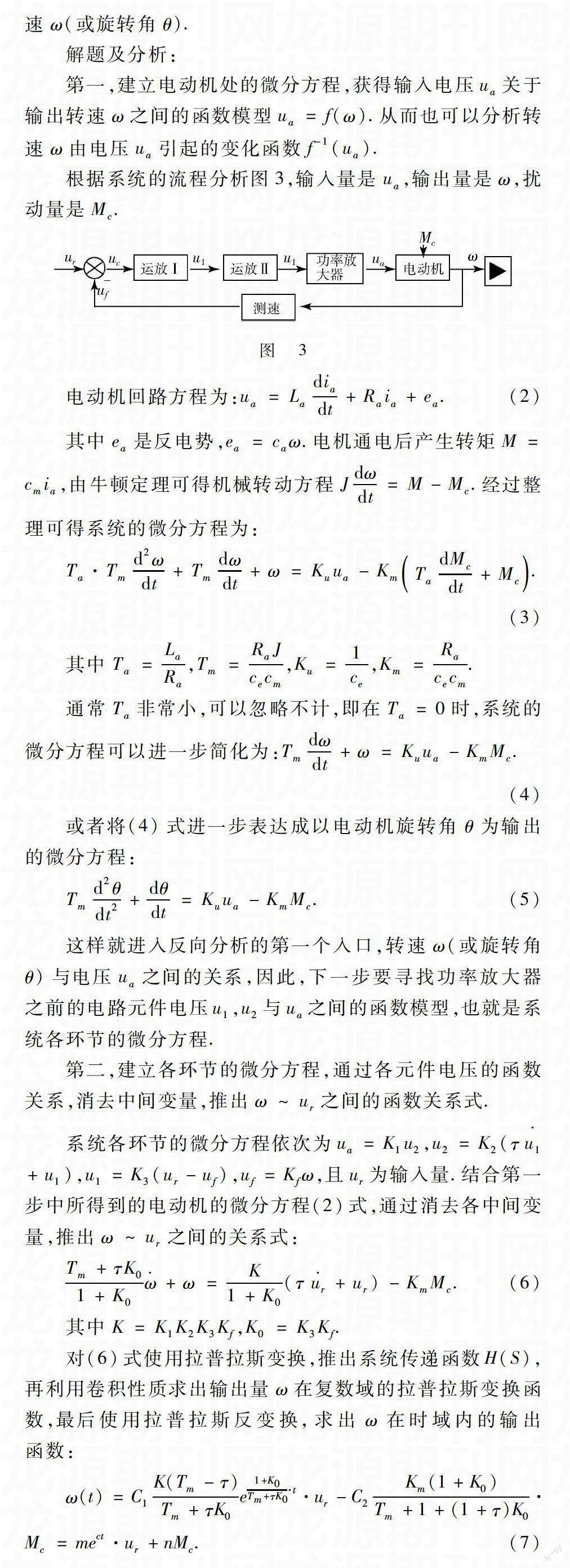
圖 2例:編輯如圖2所示的轉速ω(或旋轉角θ)控制系統微分方程及各環節微分方程,分析在輸出水溫T一定的情況下,導致旋轉角α存在取值區間[α--3σ,α-+3σ]的因素.輸入量ur經過兩個運算放大器和一個功率放大器,輸入電動機電壓ua和等效的電機轉軸上的負載轉矩Mc,輸出量是轉速ω(或旋轉角θ).
解題及分析:
第一,建立電動機處的微分方程,獲得輸入電壓ua關于輸出轉速ω之間的函數模型ua=f(ω).從而也可以分析轉速ω由電壓ua引起的變化函數f-1(ua).
根據系統的流程分析圖3,輸入量是ua,輸出量是ω,擾動量是Mc.
電動機回路方程為:ua=Ladiadt+Raia+ea.(2)
其中ea是反電勢,ea=caω.電機通電后產生轉矩M=cmia,由牛頓定理可得機械轉動方程Jdωdt=M-Mc.經過整理可得系統的微分方程為:
Ta·Tmd2ωdt+Tmdωdt+ω=Kuua-KmTadMcdt+Mc.(3)
其中Ta=LaRa,Tm=RaJcecm,Ku=1ce,Km=Racecm.
通常Ta非常小,可以忽略不計,即在Ta=0時,系統的微分方程可以進一步簡化為:Tmdωdt+ω=Kuua-KmMc.(4)
或者將(4)式進一步表達成以電動機旋轉角θ為輸出的微分方程:
Tmd2θdt2+dθdt=Kuua-KmMc.(5)
這樣就進入反向分析的第一個入口,轉速ω(或旋轉角θ)與電壓ua之間的關系,因此,下一步要尋找功率放大器之前的電路元件電壓u1,u2與ua之間的函數模型,也就是系統各環節的微分方程.
第二,建立各環節的微分方程,通過各元件電壓的函數關系,消去中間變量,推出ω~ur之間的函數關系式.
系統各環節的微分方程依次為ua=K1u2,u2=K2(τu1·+u1),u1=K3(ur-uf),uf=Kfω,且ur為輸入量.結合第一步中所得到的電動機的微分方程(2)式,通過消去各中間變量,推出ω~ur之間的關系式:
Tm+τK01+K0ω·+ω=K1+K0(τur·+ur)-KmMc.(6)
其中K=K1K2K3Kf,K0=K3Kf.
對(6)式使用拉普拉斯變換,推出系統傳遞函數H(S),再利用卷積性質求出輸出量ω在復數域的拉普拉斯變換函數,最后使用拉普拉斯反變換,求出ω在時域內的輸出函數:
ω(t)=C1K(Tm-τ)Tm+τK0e1+K0Tm+τK0·t·ur-C2Km(1+K0)Tm+1+(1+τ)K0·Mc
=mect·ur+nMc.(7)
其中m=C1K(Tm-τ)Tm+τK0,n=C2Km(1+K0)Tm+1+(1+τ)K0,c=1+K0Tm+τK0.
這樣就找到反向分析的第二個入口,轉速ω(通過輸入量ur)與時間t建立起來的聯系.同時,明確輸出量ω受電源電壓輸入量ur和擾動量Mc等因素的影響.
第三,通過反饋電壓uf與輸入電壓ur形成的偏差ue=ur-uf,建立ω~ue關系式,
找出使得旋轉角α存在取值區間的原因.
反饋電壓uf與輸入電壓ur形成的偏差ue稱為系統偏差,通過消去各環節中間變量的方式,同樣可以建立ω~ue的函數關系式:
Tmω·+ω=KK23τue·+Kue-KmMc.(8)
在假設不存在擾動量Mc的作用下,對上式使用拉普拉斯變換,求出輸出量ω在復數域的拉普拉斯變換函數,最后使用拉普拉斯反變換,求出ω在時域內的輸出函數ω1(t)=K(τ+K3)K3Tme-tTm·ue.在只受擾動量Mc的作用下,令ue=0,對上式再次使用拉普拉斯變換,求出輸出量ω在復數域的拉普拉斯變換函數,同樣使用拉普拉斯反變換,求出ω在時域內的又一個輸出函數ω2(t)=KmMc(e-tTm-1),最后根據疊加原理確定ω(t)=c1ω1(t)+c2ω2(t),(其中c1,c2為任意常數).
結合以上結論,又由dθdt=ω,所以旋轉角θ是轉速函數ω(t)在時域上的積分,即θ=∫ω(t)dt,當t=T時,θ(T)是一個受積分限決定的值,而α=θ(T).由于輸出量ω受電源電壓輸入量ur和擾動量Mc的影響,反饋電壓uf與輸入電壓ur形成的偏差ue=ur-uf,若假設ue=0,系統處于平衡狀態,那么ω以一個恒常數輸出;若系統偏差ue不總等于0,且是關于t的函數,則在ω(t)所在的時域內總存在輸出旋轉角θ的偏差,從而導致旋轉角α=θ(T)在[α--3σ,α-+3σ]這個區間范圍內取值,且當t=T時,α=θ(T)=∫ω(t)dt=∫[c1ω1(t)+c2ω2(t)]dt,由之前的分析這個積分結果是關于電源電壓輸入量ur和擾動量Mc的表達式.
因此,若期望在ue不總等于0,旋轉角α=θ(T)在[α--3σ,α-+3σ]這個區間范圍內取值時,通過系統調節盡快在穩定狀態下得到輸出量T,就需要對系統偏差ue進行消除,即調節電源電壓輸入量ur的穩定性和消除擾動量Mc.這樣就通過預設變量之間的函數模型,找出解決問題的途徑.
【參考文獻】
[1]石瑞平.基于一元回歸分析模型的研究[D].河北科技大學,2009.
[2]向崢嶸.區間系統狀態反饋控制的完整性設計[J].系統工程與電子技術,2002(10).