汽車防撞雷達系統設計
2015-05-09 03:47:46柳貴東付少波
軍事交通學院學報 2015年5期
關鍵詞:信號
孫 昱,柳貴東,付少波
(軍事交通學院基礎部,天津300161)
汽車防撞雷達測量主車與目標車之間的距離,同時獲取相對速度以及相對方位角等信息,并將其傳送給系統的控制單元進行處理。毫米波雷達相比于其他測量介質雷達(如超聲波雷達、紅外雷達、激光雷達)具有探測距離遠、運行可靠、測量性能受天氣等外界因素的影響較小等優點,最適合應用于汽車防撞雷達應用。毫米波汽車防撞雷達還處于實驗研究階段,除成本問題外,另一個重要原因就是虛警問題,如鄰近車道上的車輛產生的虛假信號。這要求防撞雷達必須具備測角能力,目標的方位角信息對于減少虛警是必不可少的[1]。本文結合國內外毫米波汽車雷達研究進展,從提高工作頻段、雷達波形設計、超分辨數字波束形成方法3個方面入手,探討提高系統方位角分辨率和多目標識別能力以減少虛警。
1 提高雷達工作頻率
當前毫米波汽車雷達工作頻段主要集中在24 GHz和77 GHz,隨著亞毫米波和太赫茲器件及系統的發展,100 GHz以上的雷達系統漸漸成為研究熱點。通過采用更高的頻率,可使汽車雷達小型化,并可提高方位角分辨率和距離分辨率。
1.1 小型化
典型的汽車雷達傳感器尺寸約10 cm×8 cm×6 cm,安裝在車體內仍然占用較大空間。提高工作頻率,可以縮小天線尺寸,節省空間。以貼片陣列天線為例,根據天線理論,一個貼片單元的寬度為1/2波長。150 GHz頻段下16單元貼片陣列與77 GHz 4單元貼片陣列尺寸相同,如圖1所示。所以同樣尺寸的天線,150 GHz雷達系統可以比77 GHz得到更高的性能。如果兩個天線單元數目相同,在保持同樣性能的情況下,150 GHz雷達系統的體積約為77 GHz的1/4。

圖1 77 GHz和150 GHz頻段貼片陣列對比
1.2 方位角分辨率
雷達天線孔徑越大,頻率越高,橫向或方位角分辨率越高。如圖2所示,假設77 GHz雷達天線孔徑寬度為5 cm,距雷達50 m的橫向分辨率為4.2 m。此時的方位角分辨率為2.4°,而相同孔徑寬度在相同距離時,150 GHz雷達的橫向分辨率可以達到2.1 m,方位角分辨率 1.2°,可得到更好的單目標檢測能力。
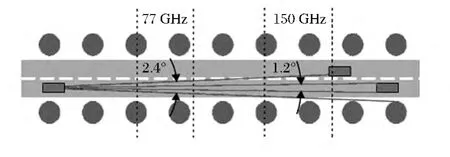
圖2 77 GHz和150 GHz橫向分辨率對比
1.3 距離分辨率
雷達系統的距離分辨率取決于調頻連續波(frequency modulated continuous wave,FMCW)雷達的帶寬。當前,77 GHz雷達傳感器可實現4 GHz帶寬,3.8 cm的距離分辨率。150 GHz雷達可實現8 GHz帶寬,距離分辨率小于1.9 cm。因此,可提高測量精度和多目標分辨能力。
2 雷達波形設計
雷達的波形選擇要充分考慮抗干擾性和可實現性、多目標識別以及回波處理中算法的快速簡單性。FMCW方式具有適于探測近距離目標,具有峰值功率低、射頻結構簡單、測量時間短等優點。因此,它一直是汽車防撞雷達的首選。但其缺點也很明顯,如:線性調頻度不易獲得,導致距離分辨率變壞;多目標場景下,三角波調制調頻連續波會產生虛假目標,從而影響防撞雷達的工作性能。
2.1 FMCW 原理
FMCW雷達的基本原理是發射信號通過三角波或鋸齒波頻率調制,利用發射和回波信號之間的頻率差確定目標距離(如圖3所示),當前方目標有相對速度時,信號的回波含有頻移,通過對中頻信號的處理即可獲得目標的相對速度和相對距離的信息。

圖3 FMCW雷達目標回波信號
在發射信號的上升段和下降段,回波中頻輸出信號為

式中:f0為發射信號中心頻率;B為頻帶寬度;R為相對距離;Tc為掃頻周期;V為相對速度;c為光速。
根據式(1)、(2),可以獲得前方目標的相對距離R和相對速度V為

上述過程可等價為在距離—速度(R—V)平面內確定兩個斜率為相反的直線(如圖4所示),從而可以獲得一個交點即為真實的目標信息點,如此即可確定目標的相對速度和距離信息。在單個目標的情況下,FMCW雷達表現了很好的目標檢測性能。在實際道路環境中,雷達的探測范圍內經常會出現多個目標車輛,此時三角波調制方式不能滿足多目標識別的目的,會產生虛假目標(如圖4所示)。

圖4 虛假目標的產生
2.2 FSK+FMCW 體制
頻移鍵控(frequency shift keying,FSK)體制又稱雙頻測距法[2],交替發出兩種頻率的電磁波,可接收到兩個具有不同多普勒頻率的回波。通過兩個回波的多普勒頻率差和相位差可得到相對速度和距離。FSK體制雷達信號頻帶窄,調制波形簡單,可同時捕捉多個運動目標,系統實現簡單,成本比FMCW體制要低很多。缺點是不可以探測相對靜止的目標(相對靜止的目標沒有多普勒頻移),系統響應比較慢,多用于測速雷達。
FSK+FMCW體制[3]結合了上述兩種體制的優點,試圖解決雷達多目標辨識和算法的實時性問題。FSK+FMCW發射波形如圖5所示,圖中:fshift為A段和B段的頻移;finc為A段或B段的頻率步進增量;BW為頻帶寬度;N為A段或B段的波段個數。其思路是頻率按線性規律步進,A段和B段如圖所示交替發射,接收機將回波信號變為基帶信號,在每個A段、B段信號結束處進行采樣。通過分別對A段和B段進行快速傅里葉變換,同一目標可以獲得相同的中頻信號k=kA=kB,從而它們在距離—速度平面內為相同的直線,但相位角則為相互不同的ΦA、ΦB。其中含有目標的相對速度和相對位移信息。因此,ΔΦ =ΦA-ΦB可以通過下式求得


圖5 FSK+FMCW波形
在距離—速度平面,由A段和B段的頻率信息和相位差信息可無模糊地確定目標的速度和相對距離,可避免虛假目標的產生。
FSK+FMCW體制波形對比FMCW具有測量時間短,算法和目標信息計算簡單,并且具有多目標識別能力。同時也克服了FSK方式不能分辨相對靜止目標的缺點,具有很高的實用價值。
3 超分辨數字波束形成

77 GHz傳感器的方位角分辨率通常在2°~5°。為了進一步提高方位角分辨率,可應用超分辨數字波束形成方法。
一個典型的數字波束形成(digital beamforming,DBF)陣列雷達前端架構如圖6所示。信號源輸出FMCW信號給發射天線。同時,一部分發射信號作為本地振蕩信號與一組天線陣列接收的信號混頻,將接收信號下變頻到基帶射頻信號,通過A/D,送到數字信號處理器中進行陣列數字信號處理。
傳統的陣列處理方法利用陣列波束形成進行空間掃描,對于一定的陣列合成尺寸,其空間分辨率受瑞利限的限制。超分辨陣列信號處理方法的目的是檢測空間輻射源并進行測向和定位,突破瑞利限的限制。典型的超分辨陣列信號處理方法有多重信號分類(multiple signal classification,MU-
為了增強相互靠近的多目標識別能力,要求汽車雷達傳感器的方位角分辨率越高越好。傳統的波達方向(direction of arrival,DOA)估計方法如單脈沖技術或空間功率譜測量技術,其方位角分辨率固定為半功率波束寬度:SIC)算法[4]。

圖6 數字波束形成的結構示意
MUSIC算法對多天線陣列接收的含噪信號進行子空間分解。通過對均勻線性陣列接收信號自相關矩陣的特征值分解可得到噪聲子空間和信號子空間,進而得到目標的DOA估計。
假設采用均勻天線陣列m元天線對p個目標信元在二維空間進行測向的問題。陣元間距d=λ/2,有p個互不相關的窄帶信號源平面波輻射到線陣上,信源方向分別是 θ1,θ2,…,θp。在陣元第n次采樣的時候,得到基帶數據為

式中:A=[α(θ1),α(θ1)…,α(θp)]為陣列導向矢量;S(n)為待求結果;U(n)為加性噪聲。
接收信號的協方差矩陣為

對Rxx進行特征值分解,可分解為相互正交的信號特征向量和噪聲特征向量。

式中:Vs和Λs分別為源信號的特征向量和特征值;Vn為噪聲特征向量。
因為,VnHα(θ)=0,構造如下空間譜函數:

譜函數最大值所對應的θ就是信號源方向的估計值。
MUSIC算法的一個重要步驟是子空間估計,即通過計算空間相關矩陣的特征分解。信息理論準則如 MDL或 AIC可用于估計信號的數量[5]。如果子空間估計失敗,DOA估計將給出錯誤的結果,如目標角度錯誤,或未發現目標,這會大大降低防撞雷達的可靠性。提高信噪比、入射信號去相關以及天線陣列失配校準是能否成功進行子空間估計的重要因素。
相關研究實驗結果[6]表明,77 GHz防撞雷達實驗平臺基于MUSIC超分辨DBF方法所獲得的方位角分辨率比傳統DBF方法(如Bartlett波束形成)大約高3倍,達到1.7°。基于 MUSIC超分辨DBF方法能大幅提高方位角分辨率,具有非常好的應用前景。
4 結語
針對目前汽車防撞雷達高性能、低虛警的設計要求,本文主要從雷達工作頻率、波形設計以及超分辨數字波束形成體制3個方面進行研究,提高雷達工作頻率可獲得更高的分辨率和更小的體積;通過對FSK和FMCW兩種基本方式進行綜合,可以得到性能更優的FMCW+FSK雷達信號,實現多目標分辨;基于MUSIC超分辨DBF方法可提高陣列天線固有的方位角分辨率,具有非常好的應用前景。
[1] 張建輝,劉國歲,顧紅,等.編碼步進調頻連續波在汽車防撞雷達中應用[J].電子學報,2001,29(7):943-946.
[2] Artis,Jean P,Henrio,et al.Automotive radar development methodology [C]//International Conference on Radar Systems.Brest,France,1999.
[3] Klotz M,Rohling H.24 GHz radar sensors for automotive applications[C]//International Conference on Microwaves and Radar.Wrociaw,Poland,2000.
[4] Ralph O,Schmidt.Multiple emitter location and signal parameter estimation[J].IEEE Trans.Antennas and Propagation,1986,34(3):276-280.
[5] Mati W,Thomas K.Detection of signals by information theoretic criteria[J].IEEE Trans.Acoustics,Speech,and Signal Processing,1985,33(2):387-392.
[6] Steinhauer M,Ruo H O,Irion H,et al.Millimeter wave radar sensor based on a transceiver array for automotive applications[J].IEEE Trans,Microwave Theory and Techniques,2008,56(2):261-269.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
