基于RDP三維定位模型的機載InSAR區域網平差
2015-04-20 02:48:38王仁禮趙瑩芝
測繪科學與工程 2015年4期
王仁禮,趙瑩芝,,高 力,王 一
1. 山東科技大學 山東省基礎地理信息與數字化技術重點實驗室,山東 青島,266590;2. 航天天繪科技有限公司,陜西 西安,710100;3. 西安測繪研究所,陜西 西安,710054
?
基于RDP三維定位模型的機載InSAR區域網平差
王仁禮1,趙瑩芝1,2,高 力3,王 一2
1. 山東科技大學 山東省基礎地理信息與數字化技術重點實驗室,山東 青島,266590;2. 航天天繪科技有限公司,陜西 西安,710100;3. 西安測繪研究所,陜西 西安,710054
本文在分析距離-多普勒-相位(Range-Doppler-Phase,RDP)模型的基礎上,構建了該模型的原始誤差方程式,從控制點數量及布點方式對區域網平差精度的影響出發,利用一組機載InSAR仿真數據對基于RDP三維定位模型的機載InSAR區域網平差進行實驗驗證。結果表明,該模型能有效提高加密點的精度,減少對控制點的依賴;同時,由于干涉參數定標與定向參數解算同時進行,使得它既可直接計算圖像上任意點的三維坐標,又能提高內部符合度,從而解決了重疊區域三維坐標不一致的問題,實現了平差區域內生成的DSM、DOM自然拼接。
機載InSAR;RDP模型;三維定位;區域網平差
1 引 言
干涉合成孔徑雷達信息具有快速、全天時、全天候等突出優勢,能夠獲取大面積高精度的高程信息及地表變形信息[1],已成為當前獲取困難地區數據和測圖的主要手段,并廣泛應用于地形三維測繪、軍事偵察和災害監測等眾多領域,成為近年來研究的熱點。
在機載InSAR系統實用化大區域測圖中,由于載機運動的不穩定性導致不同景的圖像對應的三維定位參數是時變的,因此需要對圖像的飛行位置、飛行速度及干涉參數進行優化。傳統機載InSAR影像定位方法一方面多局限于對單景圖像進行處理,一般對于單景影像至少需要3個控制點(GCP)來進行定位[2],并且方程的病態性要求增加較多 GCP,但對于困難測區或測量人員無法到達的地區,在SAR影像上則不易選取控制點或者選取的控制點無法進行實地測量;另一方面,由于各影像三維定位參數解算精度的不一致,從而造成影像間重疊區域三維坐標不一致,增加了后續產品的拼接難度。
而區域網平差技術充分利用控制點以及相鄰影像間和條帶間的連接點,分別建立了相應的誤差方程式,然后進行整體平差運算,將定向參數和干涉參數同時解算,提高了內部的符合度;同時,降低了對地面控制點在數量和分布上的依賴性,為在稀少控制點甚至無控條件下進行機載InSAR區域網平差提供了可能。
1.1 基本原理
RDP模型將F.Leberl模型與InSAR干涉測量模型相結合[3],從而建立飛機的定向參數、雷達系統的干涉參數、像點坐標和地面點坐標之間的關系:
(1)
其中,式(1)中前兩式是F.Leberl模型[4]中的“距離-多普勒”模型,該模型是SAR影像的嚴密構象模型;后者是InSAR干涉測量的基本原理,即相位模型。式中,(XG,YG,ZG)為影像坐標(x,y)對應的地面坐標,(XS,YS,ZS)、(VX,VY,VZ)為t時刻飛機的飛行位置與速度。經過運動補償后,飛機的運動軌跡一般為勻速直線運動,因此,它們之間的函數關系可表示為:
(2)
相位模型中fd為多普勒中心頻率,λ為雷達系統波長,Δφ=Δφ′+φ0為絕對干涉相位差。其中,Δφ′為相位解纏后的相位,φ0為相位偏置,B為主副天線之間的基線長度,α為基線傾角。
在不考慮近點距、距離向比例尺分母誤差情況下,待求的三維定位參數為:XS0,YS0,ZS0,VX,VY,VZ,B,α,φ0。
1.2 平差方法
在未知數近似值的鄰域內對RDP模型的各方程按泰勒級數展開,取其一次項后得到原始誤差方程式:
(3)
式中,aij(i=1,2,3;j=1,2,…,9),bij(i=1,2,3;j=1,2,3)分別為平差模型的三個方程式對9個定位參數和連接點的地面坐標求偏導數,式(3)中未列出的系數項均為0,li(i=1,2,3)為常數項。對影像上的控制點和連接點分別列出以上三式,可建立誤差方程:
V=AT+BX-L
(4)
式中,T是定位參數的改正數,X為連接點地面坐標的改正數,A為定向參數改正數的系數矩陣,B為連接點坐標改正數的系數矩陣。
對于上述誤差方程式可采用以下兩種解算方法:
(1)整體答解
對所求的定向參數和連接點的地面坐標給出初始值,對控制點和連接點所對應的每一個像點列出誤差方程式,構建法方程:
(5)
當區域網較大時,連接點的個數要遠大于三維定位參數。因此,可采用消去連接點對應的地面坐標的改正數,得到三維定位參數的解為:
T=(ATA-ATB(BTB)-1BTA)-1(ATL-ATB(BTB)-1BTL)
(6)
待求出每景影像的三維定位參數后,再利用式(1)求得全部待定點的地面坐標。
(2)兩類未知數交替趨近
首先,將地面點的坐標值作為近似值,求出影像的三維定位參數;然后,再利用三維定位參數的新值計算地面點的坐標值,反復趨近至三維定位參數改正值和連接點的地面點坐標改正值均小于某個限差時結束。
2 實驗數據及實驗結果分析
2.1 實驗數據
本文采用一組機載InSAR的仿真數據對該模型的有效性、精度及其影響因素進行驗證和分析。該影像為一條航帶的3景機載InSAR影像,航向重疊度為67%,飛行方向自西向東,飛行高度12004m,飛行速度207m/s,模型編號為1-1,1-2,1-3。該實驗坐標系統采用WGS-84坐標系,投影系統為高斯投影。
根據InSAR影像的分辨率及POS系統的精度指標等,將控制點的三維坐標作為真實值,對連接點的像點坐標加入均值為0、方差為0.5像素的高斯白噪聲;對POS系統測量的位置和速度分
別加入均值為0、方差分別為0.05m和0.005m/s的高斯白噪聲;對基線長度和基線傾角分別加入均值為0、方差分別為0.0001m和0.003°的高斯白噪聲。其余相關參數見表1。
表1 機載InSAR系統相關參數
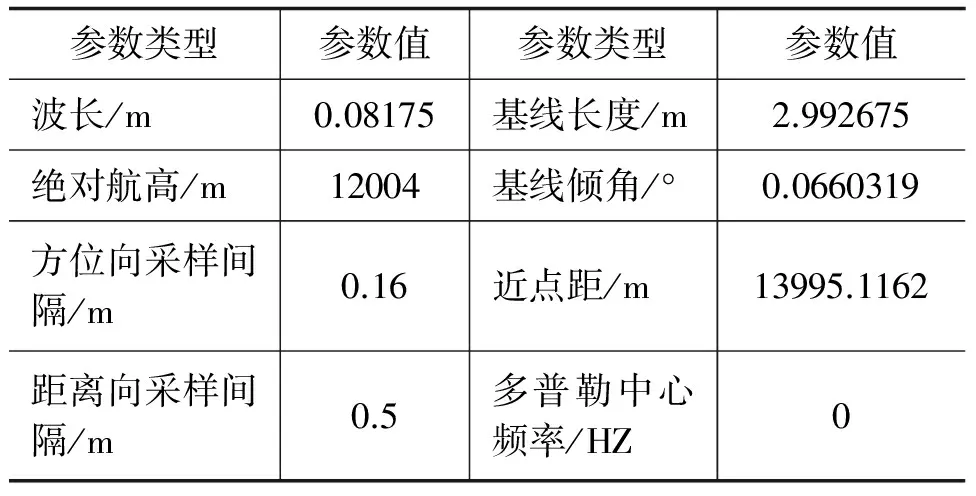
參數類型參數值參數類型參數值波長/m0.08175基線長度/m2.992675絕對航高/m12004基線傾角/°0.0660319方位向采樣間隔/m0.16近點距/m13995.1162距離向采樣間隔/m0.5多普勒中心頻率/HZ0
2.2 實驗結果及分析
2.2.1 單景影像平差與區域網平差精度對比
控制點和檢查點的選取方式及加密點的分布情況如圖1所示。單景影像平差時,每景影像分別選取三個控制點,平差后均選取15個檢查點及重疊區域的連接點統計解算精度。
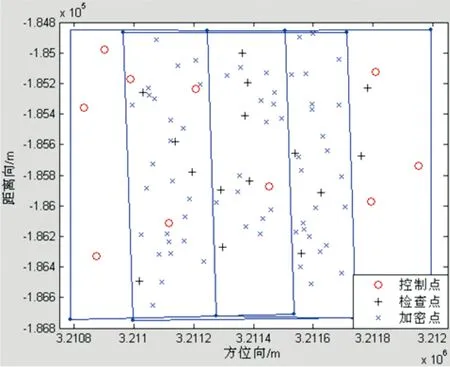
圖1 控制點、檢查點、加密點示意圖
平差后檢查點及重疊區域連接點的平面和高程中誤差結果如表2所示。
表2 單景影像定標與區域網平差精度對比
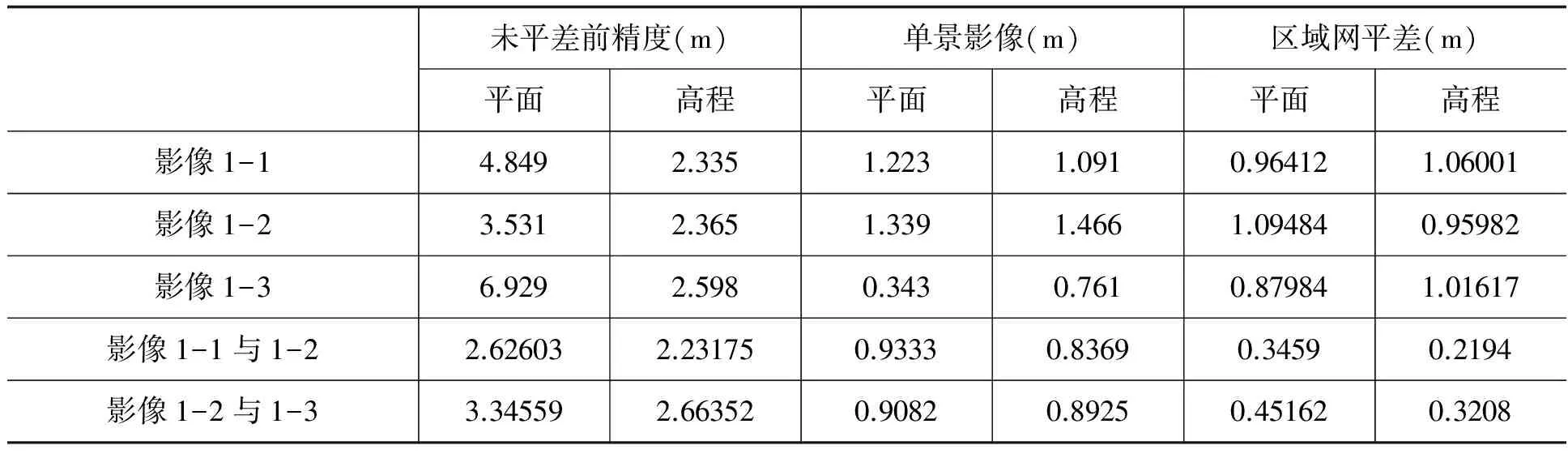
未平差前精度(m)單景影像(m)區域網平差(m)平面高程平面高程平面高程影像1-14.8492.3351.2231.0910.964121.06001影像1-23.5312.3651.3391.4661.094840.95982影像1-36.9292.5980.3430.7610.879841.01617影像1-1與1-22.626032.231750.93330.83690.34590.2194影像1-2與1-33.345592.663520.90820.89250.451620.3208
由表2可知,區域網平差的精度高于單景影像糾正的精度;另外,為了充分說明區域網平差的優勢,根據重疊區域連接點的三維坐標中誤差可以看出,由于各影像連接處均有加密點進行約束,因此重疊區域的誤差明顯減小,從而實現了DEM和DOM自動拼接。
2.2.2 平差精度的影響因素
進行區域網平差時,控制點的布設方案、數目等都會對其精度帶來一定的影響[5],因此,分析這些影響因素對野外控制點的選取具有非常重要的意義。
1)控制點的分布
該實驗通過圖2所示的三種控制點布設方案驗證控制點分布對區域網平差精度的影響:方案一僅將控制點布設在航帶的左側第一景影像中;方案二將控制點布設在航帶的首尾兩景影像;方案三則對整個航帶進行均勻布點。實驗結果如表3所示。
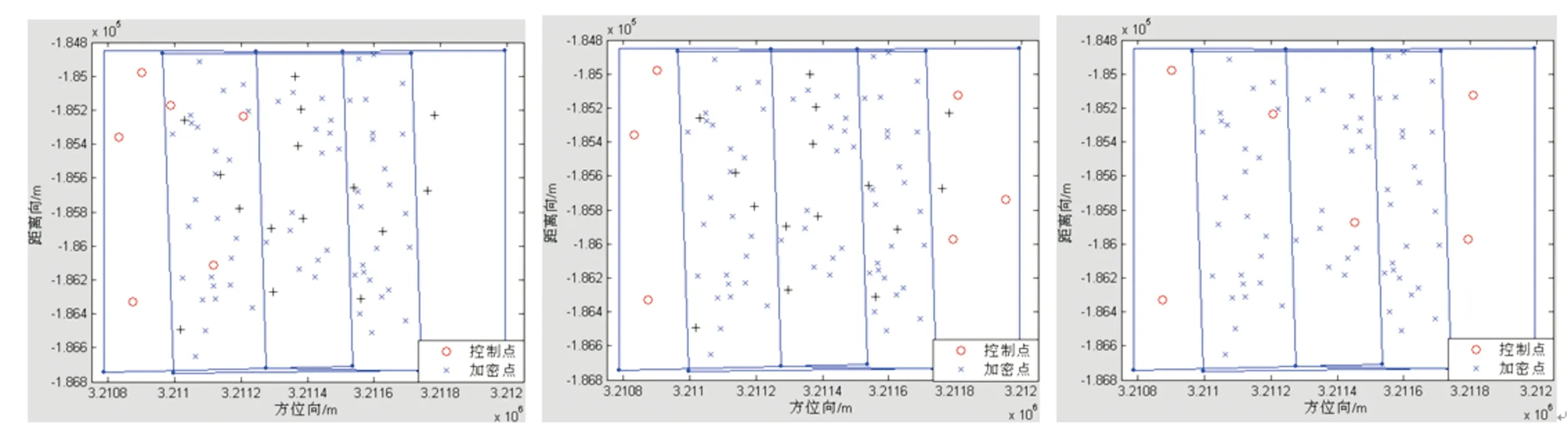
(1)方案一 (2)方案二 (3)方案三圖2 控制點選取方式
表3 布點方案對平差精度的影響/(m)

布點方案影像1-1影像1-2影像1-3平面高程平面高程平面高程方案一1.073570.9887971.25451.12421.327751.00796方案二0.994151.075611.204411.053750.922941.04803方案三0.964121.060011.094840.959820.8798471.01617
由表3可知,布點方案三中,由于各影像上均有控制點,因而對各景影像的三維定位參數進行整體答解時,各景影像的誤差均能得到控制,誤差分布均勻;對于方案一,隨著影像數增加誤差會逐漸增大,因此,僅靠加密點傳遞會使誤差不斷積累;另外,相對于單景影像進行平差,由于將控制點和加密點進行聯合平差,因而增加了連接條件,提高了解算精度。
2)控制點的數目
在進行區域網平差時,控制點的數目也會對平差的精度帶來很大影響。該實驗通過上述方案二和方案三兩種方案,將控制點的數目由三個逐漸增加,來驗證控制點數目對平差精度的影響,實驗結果如表4所示。
表4 控制點數目與平差精度的關系/(m)

34681215平面高程平面高程平面高程平面高程平面高程平面高程方案二3.172.841.681.431.151.050.910.730.850.690.910.73方案三3.482.991.631.320.981.010.960.780.840.700.930.76
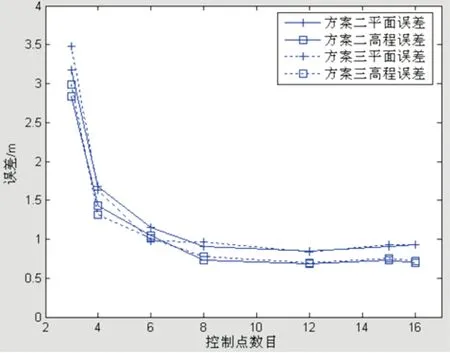
圖3 控制點數目對精度的影響
根據表4可以繪制出控制點數目與平差精度的曲線圖。由圖3可以看出,采用以上兩種方案時,整條航帶的中誤差都隨著控制點數目的增加而減小,但當控制點增加到一定數目后,航帶的中誤差變化趨于平緩。
3 結束語
本文對RDP模型進行了分析,推導了該模型的誤差方程式,并利用實驗證明了區域網平差的優點:
(1)基于RDP三維定位模型的機載InSAR區域網平差可以有效地減少控制點的數目,解決了單景影像平差導致的影像間重疊區域三維坐標不一致問題,并且平差的精度較單景影像有所提高;但控制點的布設方式及控制點的數目都會對平差的精度產生影響。
(2)充分利用控制點的三維信息,將定向參數和干涉參數同時解算,不僅提高了內部符合度,還能直接計算圖像上任一點的三維坐標,可實現大區域的DEM和DOM等高級產品的自動拼接。
(3)平差后影像具有定向參數,可單獨利用攝影測量方法進行正射糾正。
值得說明的是,本文中的平差模型未考慮雷達系統的近點距、方位向比例尺分母、多普勒中心頻率以及POS系統安置、漂移等誤差,后期還需要將這些誤差引入以優化平差模型。
[1]H. Raggam and K. H. Gutjahr. InSAR Block Parameter Adjustment[C]. Proc. 3rd European Conf. SAR, Munich, Germany,2000.
[2] 張薇, 向茂生, 吳一戎. 基于三維重建模型的機載雙天線干涉SAR 外定標方法及實現[J]. 遙感技術與應用, 2009, 24(1): 82-87.
[3]馬婧,尤紅建,胡東輝. F.Leberl模型與干涉測量模型相結合的InSAR影像區域網平差[J].紅外與毫米波學報,2012,31(3):271-276.
[4]肖國超,朱彩英.雷達攝影測量[M].北京:地震出版社,2001.
[5]馬婧,尤紅建,胡東輝.機載 InSAR影像區域網平差原理及精度分析[C]. International Conference on Remote Sensing (ICRS), 2010.
Block Adjustment of Airborne InSAR Images Based on the Three Dimensional Localization RDP Model
Wang Renli1, Zhao Yingzhi1,2,Gao Li3, Wang Yi2
1.Shandong Provincial Key Laboratory of Geomatics and Digital Technology, Shandong University of Science and Technology, Qingdao 266590,China 2.Aerors Inc., Xi’an 710100,China 3.Xi’an Research Institute of Surveying and Mapping, Xi’an 710054, China
Based on the RDP (Range-Doppler-Phase) model, this paper constructs an original error equation of it. According to the influence of the amount and distribution of GCPs on the block adjustment accuracy, the paper verifies the block adjustment of airborne InSAR images based on three dimensional localization RDP model using a set of airborne InSAR simulation data. The results show that this model can effectively improve the accuracy of the pass points and reduce the dependence on GCPs. Meanwhile, due to the synchronous calculation of interference parameters and orientation parameters, the three dimensional coordinates of any point on the images can not only be calculated directly but also the internal consistency can be improved by the model, which resolves the problem of three dimensional coordinates inconsistent in overlapping region and realizes the automatic stitching of DEM and DOM in blocking areas.
airborne InSAR; RDP model; three dimensional location; block adjustment
2015-02-11。
王仁禮(1960—),男,教授,主要從事數字攝影測量與航天攝影測量方面的研究。
P236
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52