仿人智能PID控制在無塔恒壓供水中的應(yīng)用
2015-04-19 02:10:51柳棟梁汪玉鳳
機(jī)械制造 2015年11期
□ 柳棟梁 □ 汪玉鳳
蘭州理工大學(xué)機(jī)電工程學(xué)院 蘭州 730050
目前的供水方式大都向著高效節(jié)能、自動(dòng)可靠的方向發(fā)展[1]。然而,傳統(tǒng)供水系統(tǒng)(如恒速泵加壓供水、高位水塔供水等),在用水高峰期,水的供給量常常低于需求量,出現(xiàn)水壓降低、供不應(yīng)求的現(xiàn)象;反之,則出現(xiàn)水壓升高,造成能量的浪費(fèi),同時(shí)有可能導(dǎo)致水管爆裂或用水設(shè)備損壞[1]。因此,供水系統(tǒng)的出水恒定和經(jīng)濟(jì)效益是用戶最關(guān)心的兩個(gè)指標(biāo)。
隨著工程系統(tǒng)的日益復(fù)雜化和對控制要求的精確化,常規(guī)使用的PID控制器在面對非線性、大時(shí)滯性、難以精確建模的供水系統(tǒng)時(shí),往往不能取得理想的控制效果。仿人智能控制(HSIC)是以專家及操作者積累的經(jīng)驗(yàn)和知識(shí)進(jìn)行推理描述的一種控制算法,這種算法模擬人的控制行為,對被控對象的先驗(yàn)知識(shí)要求不高,具有較強(qiáng)的魯棒性和抗干擾能力[2]。基于此,筆者將仿人智能控制方法和傳統(tǒng)PID控制方法結(jié)合起來,吸取各自的優(yōu)點(diǎn),形成仿人智能PID控制方法,應(yīng)用于控制無塔恒壓供水系統(tǒng)。
1 無塔恒壓供水系統(tǒng)模型
無塔供水系統(tǒng),顧名思義就是不建造水塔,不設(shè)置水箱,占地少,安裝方便,該系統(tǒng)充分利用自來水管網(wǎng)的原有壓力,串聯(lián)在市政管網(wǎng)上直接將水輸送至用戶,并能根據(jù)用戶用水量的變化調(diào)節(jié)變頻器,進(jìn)而調(diào)節(jié)水泵運(yùn)轉(zhuǎn),使水泵始終工作在高效區(qū),不僅節(jié)電效果明顯,而且避免了水質(zhì)的二次污染[1]。因此,它在高層建筑、居民小區(qū)、工礦企業(yè)中得到了廣泛應(yīng)用。
如圖1所示,無塔供水系統(tǒng)直接串聯(lián)在市政管網(wǎng)上,自來水流經(jīng)穩(wěn)壓罐、水泵等過流部件送達(dá)用戶,壓力傳感器可測管網(wǎng)壓力,當(dāng)用水量小、壓力足夠時(shí),系統(tǒng)可利用市政管網(wǎng)的原有壓力直接給用戶供水,當(dāng)用水量大、壓力不足時(shí),才啟動(dòng)加壓泵,并在氣壓罐的共同作用下給用戶供水 (氣壓罐充入惰性氣體,壓力大時(shí),水被壓入氣壓罐,這樣能儲(chǔ)存一部分能量,當(dāng)水壓降低時(shí)補(bǔ)給,可使加壓泵工作于高效區(qū)間,達(dá)到節(jié)能降耗的目的)。
2 仿人智能PID控制
2.1 原理
仿人智能PID控制的基本思想是采用分層控制機(jī)制,在上層通過特征辨識(shí)判別當(dāng)前的工作狀態(tài),模擬操作者的控制行為;在底層采用常規(guī)PID控制方法,辨識(shí)工作狀態(tài)并配置相應(yīng)的PID參數(shù),實(shí)現(xiàn)多模態(tài)控制或決策。這種控制算法既反映出PID控制的特點(diǎn),又反映了人工操作的適應(yīng)性,有其可行性[3]。算法采用產(chǎn)生式規(guī)則對專家經(jīng)驗(yàn)進(jìn)行描述,規(guī)則表示為:

這種基于規(guī)則的if-then模型直觀地描述了人的直覺推理邏輯和各種定性的模糊信息,迅速準(zhǔn)確。
2.2 參數(shù)配置
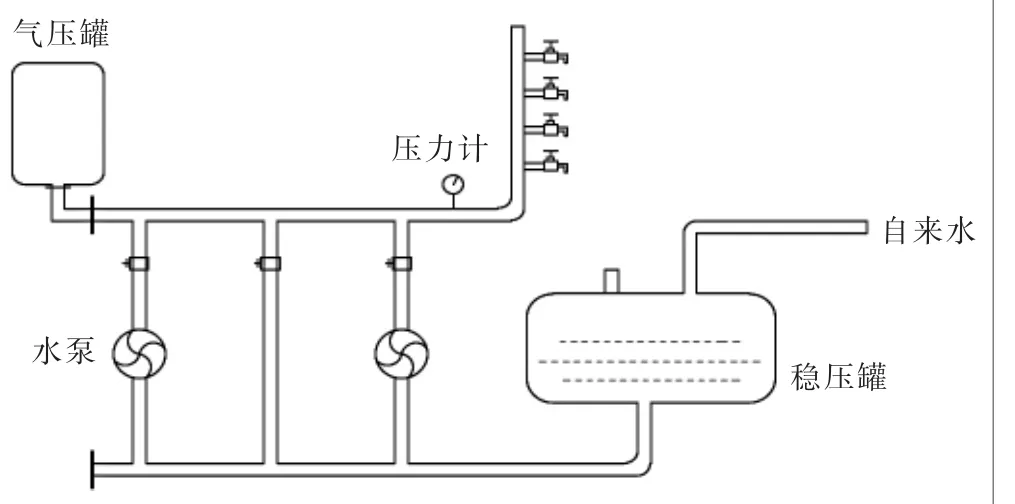
▲圖1 無塔供水系統(tǒng)結(jié)構(gòu)圖
在配置相應(yīng)的 P、I、D(KP、KI、KD)參數(shù)時(shí),比例控制參數(shù)KP是基于偏差e調(diào)節(jié)的,當(dāng)|e|較大時(shí),比例控制參數(shù)KP的作用應(yīng)加大并保持住,而在|e|減小到零的過程中,應(yīng)減小KP作用,這樣既能縮短調(diào)節(jié)時(shí)間,又能防止調(diào)節(jié)過度。積分控制參數(shù)KI是依據(jù)“誤差是否存在”調(diào)節(jié)的,它對誤差信息是不加選擇的記憶,作用是消除靜差,對其要有選擇地運(yùn)用。微分控制參數(shù)KD是根據(jù)偏差變化趨勢調(diào)節(jié)的,它可預(yù)測誤差變化的趨勢有效減小超調(diào),但微分控制參數(shù)KD只在誤差較小時(shí)使用,當(dāng)誤差較大時(shí),KD作用很大,可能會(huì)抵消KP作用,導(dǎo)致系統(tǒng)失穩(wěn)[4]。
2.3 控制方法
算法選用誤差 e(k)和誤差變化率Δe(k)作為控制器的輸入變量,描述系統(tǒng)的動(dòng)態(tài)特征,表征其所處的工作狀態(tài)。控制器的輸出Δu(k)可以表示為:

數(shù)字PID控制器采用增量式PID控制算法,控制器的輸出Δu(k)可以表示為:

式中:KP、KI、KD分別為相應(yīng)配置的 P、I、D 參數(shù);e(k)=sp-y(k),Δe(k)=e(k)-e(k-1)(sp為壓力設(shè)定值,y(k)為系統(tǒng)壓力輸出值)。
結(jié)合圖2給出系統(tǒng)動(dòng)態(tài)響應(yīng)說明控制原理,圖中e2、e1、d均為誤差,根據(jù)誤差大小來劃分響應(yīng)區(qū)間,具體控制規(guī)則如下。
(1)if|e|≥e2,說明系統(tǒng)誤差過大。此時(shí)不論誤差變化趨勢如何,控制器的輸出都應(yīng)按最大或最小輸出,使誤差絕對值以最大速度減小,相當(dāng)于開環(huán)控制[3]。
(2) if e1≤|e|<e2,and e(k)×Δe(k)≥0(如圖2中ab、cd和ef段),系統(tǒng)誤差較大,系統(tǒng)輸出正偏離設(shè)定值,即誤差向著絕對值增大的方向變化,此時(shí)可實(shí)施較強(qiáng)的控制作用,以迅速扭轉(zhuǎn)誤差絕對值的變化趨勢,并加入積分作用,去掉微分作用。 else,e(k)×Δe(k)<0(如圖2中bc、de和fg段)時(shí),說明系統(tǒng)誤差較大,系統(tǒng)輸出正偏向設(shè)定值,即誤差向著絕對值減小的方向變化。此時(shí)可實(shí)施較弱的控制作用,讓系統(tǒng)在慣性作用下回到穩(wěn)態(tài),這樣既可以減小系統(tǒng)超調(diào),又不影響系統(tǒng)的響應(yīng)速度。
(3) if d≤|e|<e1,and e(k)×Δe(k)≥0,系統(tǒng)誤差較小,誤差偏離設(shè)定值,實(shí)施較強(qiáng)的控制作用,此時(shí)可加入積分,以減小穩(wěn)態(tài)誤差,加入微分作用,以較少超調(diào);else,e(k)×Δe(k)<0,可實(shí)施較弱的控制作用,并加入微分作用。
(4) if|e|<d,系統(tǒng)誤差很小,不動(dòng)作,這樣可減少電機(jī)、水泵的啟動(dòng)次數(shù),降低磨損,增加壽命[5]。
控制器參數(shù)配置見表1。
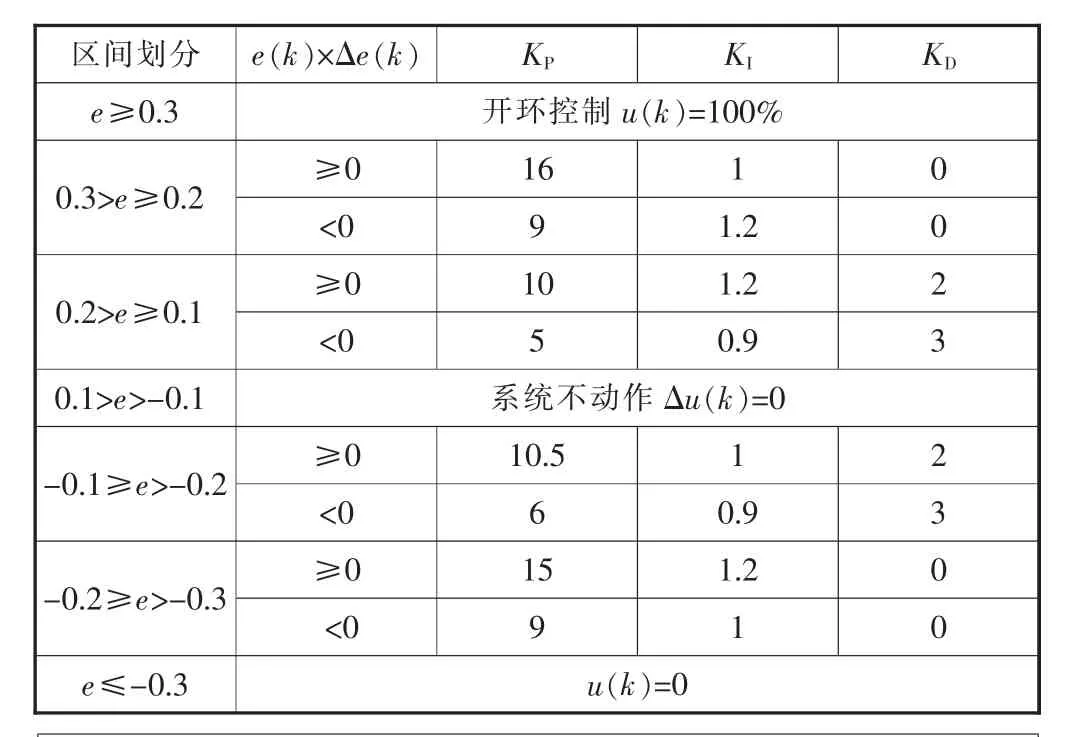
表1 控制規(guī)則表
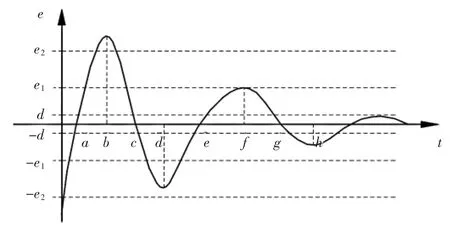
▲圖2 誤差變化趨勢
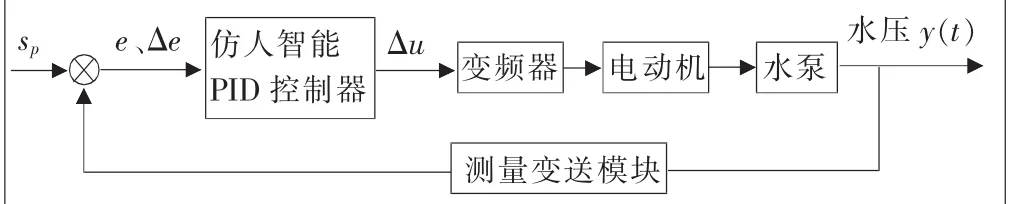
▲圖3 控制系統(tǒng)結(jié)構(gòu)圖
2.4 仿人智能PID在無塔供水系統(tǒng)中的應(yīng)用
系統(tǒng)控制結(jié)構(gòu)如圖3所示,主控制器采用PLC控制,壓力信號(hào)經(jīng)放大變換處理后變成標(biāo)準(zhǔn)0~5V電壓值,后經(jīng)A/D轉(zhuǎn)換模塊變成PLC可識(shí)別的數(shù)字信號(hào),PLC按表1控制規(guī)則運(yùn)算處理后,根據(jù)偏差大小輸出高低電平驅(qū)動(dòng)變頻器來改變電動(dòng)機(jī)的轉(zhuǎn)速,最終實(shí)現(xiàn)對水壓的控制[6]。其中,變頻器對水泵機(jī)組的控制,俗稱‘一拖多’,當(dāng)用水量不足時(shí),先由一臺(tái)水泵在變頻控制下供水,當(dāng)用水量繼續(xù)增大時(shí),將其切換為工頻工作,然后投入另一臺(tái)泵變頻運(yùn)行,以此類推。
將該控制算法應(yīng)用于高樓無塔供水系統(tǒng)中,系統(tǒng)變化更加平穩(wěn),既降低了系統(tǒng)能耗,又克服了氣壓波動(dòng)大、水泵啟動(dòng)頻繁等不足之處,加之無塔供水系統(tǒng)本身利用管網(wǎng)原有壓力的優(yōu)勢,節(jié)能達(dá)40%~60%,真正實(shí)現(xiàn)了節(jié)能降耗的目的,給企業(yè)和居民帶來了顯著的經(jīng)濟(jì)效益。
3 仿真實(shí)驗(yàn)
如前文所述,由于無塔恒壓供水系統(tǒng)的控制對象是一個(gè)時(shí)變的、非線性的、滯后的對象,很難得出它的精確數(shù)學(xué)模型,因此只能進(jìn)行近似等效。首先是市政管網(wǎng)在恒定壓力下將水送到供水系統(tǒng)中,這個(gè)階段供水系統(tǒng)壓力基本保持初始壓力,這是一個(gè)純滯后的過程,其次是當(dāng)壓力不足時(shí)啟動(dòng)水泵運(yùn)行,水泵將水充滿整個(gè)供水系統(tǒng),壓力隨之逐漸增加,直到穩(wěn)定,這是一個(gè)大時(shí)間常數(shù)的慣性過程。在此過程中,系統(tǒng)中其它控制和檢測環(huán)節(jié),如壓力檢測、繼電控制轉(zhuǎn)換、變頻環(huán)節(jié)等的時(shí)間常數(shù)和滯后時(shí)間與供水系統(tǒng)的時(shí)間常數(shù)和滯后時(shí)間相比,均可忽略不計(jì)。因此,無塔恒壓供水系統(tǒng)的數(shù)學(xué)模型可近似成一個(gè)帶純滯后的一階慣性環(huán)節(jié),經(jīng)拉式變換,傳遞函數(shù)即可以寫成[8]:

式中:K為系統(tǒng)的總增益;T為系統(tǒng)的慣性時(shí)間常數(shù);τ為系統(tǒng)滯后時(shí)間。
通過系統(tǒng)辨識(shí)[8],取 K=2,T=5,τ=4 s,采樣周期 t=0.01 s。用MATLAB對仿人智能PID和常規(guī)PID控制進(jìn)行仿真比較[8],如圖4所示,圖中data1為仿人智能PID控制下的仿真結(jié)果,data2為傳統(tǒng)PID控制下的仿真結(jié)果。
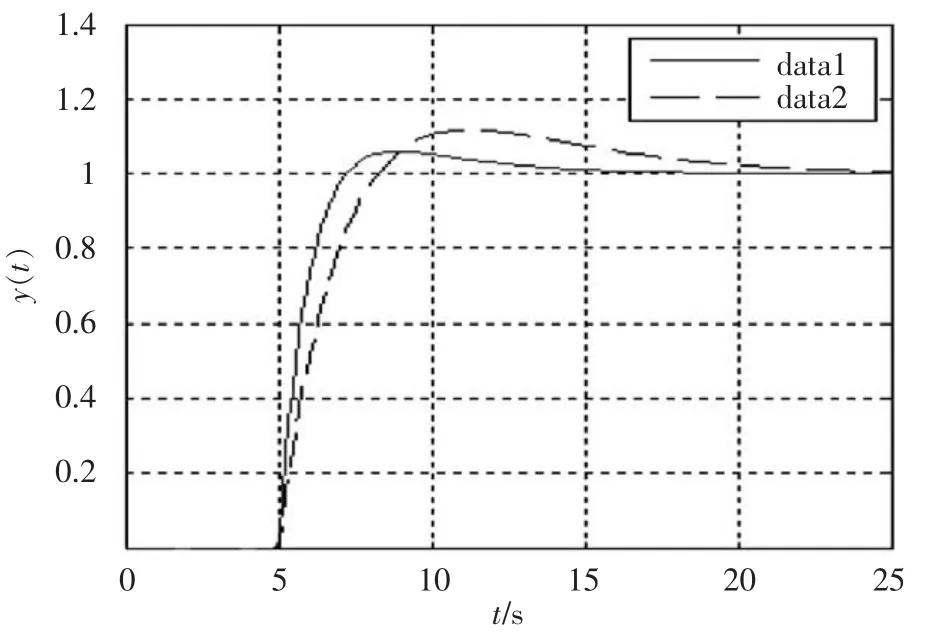
▲圖4 單位階躍下仿人智能PID與PID的比較曲線
仿真結(jié)果表明,仿人智能PID控制比傳統(tǒng)PID控制調(diào)節(jié)時(shí)間更短,具有較小的超調(diào)量,更強(qiáng)的魯棒性。
4 結(jié)束語
建立了無塔恒壓供水系統(tǒng)模型,研究了仿人智能PID控制算法,以及它在無塔恒壓供水系統(tǒng)中的應(yīng)用,實(shí)踐證明,仿人智能PID算法不僅對供水系統(tǒng)取得了良好的控制效果,而且該系統(tǒng)具有顯著的節(jié)能降耗作用。同樣,該算法對非線性、大時(shí)滯、模型未知或難以建模的復(fù)雜對象有適應(yīng)性[9]。
[1]郝欣,牟長信,伍紹斌.基于規(guī)則的智能控制在凝結(jié)水泵變頻節(jié)能優(yōu)化控制中的應(yīng)用研究 [J].東北電力技術(shù),2008(10):12-15.
[2]羅忠,柳洪義,王菲,等.基于規(guī)則的仿人智能控制方法及其應(yīng)用[J].控制工程,2009,16 (1):83-87.
[3]王忠峰,湯偉,劉慶利,等.仿人智能PID在APMP盤磨控制中的設(shè)計(jì)與應(yīng)用[J].化工自動(dòng)化及儀表, 2010,37(12):11-14.
[4]何術(shù)利,洪厚勝.仿人智能PID控制器的設(shè)計(jì)與應(yīng)用[J].工業(yè)儀表與自動(dòng)化裝置,2007(6):31-33.
[5]梁立超,蔣啟龍,王麥海,等.磁軸承軸向控制系統(tǒng)的仿人智能 PID 控制[J].機(jī)械工程與自動(dòng)化,2007(3):116-118.
[6]廖常初.S7-300/400 PLC應(yīng)用技術(shù)[M].北京:機(jī)械工業(yè)出版社,2012.
[7]李健,王冬青,王麗美.模糊PID控制器設(shè)計(jì)及MATLAB仿真[J].工業(yè)控制計(jì)算機(jī),2011,24(5):56-57.
[8]丁周偉.泵站恒壓供水系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[9]周彥,何小陽,王冬麗.時(shí)變大滯后過程的專家模糊控制設(shè)計(jì)與仿真[J].系統(tǒng)仿真學(xué)報(bào),2006,18(10):2786-2789.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
