基于輪胎合力計算與分配的車輛橫向穩定性控制研究*
2015-04-12 06:35:57唐希雯陳無畏孫保群趙林峰
汽車工程 2015年11期
關鍵詞:分配
夏 光,唐希雯,陳無畏,孫保群,趙林峰
(1.合肥工業大學汽車工程技術研究院,合肥 230009; 2.電子工程學院雷達對抗系,合肥 230037;3.合肥工業大學機械與汽車工程學院,合肥 230009)
?
2015220
基于輪胎合力計算與分配的車輛橫向穩定性控制研究*
夏 光1,唐希雯2,陳無畏3,孫保群1,趙林峰3
(1.合肥工業大學汽車工程技術研究院,合肥 230009; 2.電子工程學院雷達對抗系,合肥 230037;3.合肥工業大學機械與汽車工程學院,合肥 230009)
鑒于輪胎合力計算與分配算法只適用于四輪獨立制動/驅動和四輪獨立轉向車輛,以及路面附著系數對輪胎縱向合力和橫擺力矩可實現范圍的限制,提出一種對輪胎縱向合力和橫擺力矩進行實時計算調整和動態分配的車輛橫向穩定性控制策略。針對線性反饋計算的誤差,采用離線數值優化和非線性規劃方法實時確定輪胎縱向合力和橫擺力矩的可實現范圍,將計算的合力和力矩調整至可實現范圍內并進行動態分配。設計滑移率和前輪側偏角控制器使輪胎摩擦力跟蹤各分力,在保證精度的同時避免對車輛后輪側向力的估計。最后進行了仿真分析與基于LabVIEW PXI和veDYNA的駕駛員在環試驗驗證。結果表明,基于合力計算與分配的車輛橫向穩定性控制可有效地提高車輛軌跡保持能力,改善低附著路面上車輛的穩定性,控制效果優于滑模變結構控制。
車輛;輪胎縱向合力;橫擺力矩;合力計算與分配;橫向穩定性控制
前言
車輛在低附著系數路面上行駛時,輪胎的縱側向力不會無限地增大,當它們接近路面附著極限或達到飽和狀態時,車輛容易偏離正常行駛軌跡,導致側滑、自旋甚至側翻等喪失穩定性的危險狀況發生。
輪胎與地面之間的摩擦力是影響車輛操縱穩定性的主要因素,因此對輪胎摩擦力的計算和分配成為車輛穩定性控制的研究熱點[1]。
文獻[1]中構造了一種集成控制結構,將計算的合力與合力矩優化分配到4個輪胎,簡化了輪胎摩擦力飽和的約束形式。文獻[2]中利用自適應優化分配方法對輪胎縱側向力進行分配。文獻[3]中采用輪胎利用率為指標對輪胎力進行優化分配。文獻[4]中研究了六輪車輛輪胎力的優化分配方法。但上述研究中都要求車輛具備四輪獨立制動和四輪獨立轉向功能。文獻[5]和文獻[6]中提出了一種基于路面附著裕量的縱向力分配方法,并分析了縱向力分配效果,但未考慮輪胎與地面之間附著極限的約束。文獻[7]中將縱向力分配問題轉化成非線性規劃問題,提出了基于逐點二次規劃的合力分配方法,但規劃算法過于復雜。文獻[8]中提出了一種基于控制目標的合力動態調整方法,須通過兩次在線優化實現,在合力超過路面附著極限時動態減小目標合力。文獻[9]中采用HSRI輪胎模型通過縱向力估計側向力進行合力分配,控制精度有待提高。文獻[10]中通過將輪胎力限制在摩擦橢圓的一個矩形內,優化了輪胎力的分配過程,但矩形邊界的確定未進行定量描述。文獻[11]中提出了一種精度較高的輪胎力估計方法,但運算量較大。
針對上述輪胎合力計算與分配算法中,對車輛的四輪獨立制動/驅動和四輪獨立轉向要求比較高,且控制算法的精度和復雜程度相互制約的問題,本文中考慮路面附著系數對輪胎縱向合力和橫擺力矩的限制,提出一種基于輪胎縱向合力和橫擺力矩實時計算調整與動態分配的車輛橫向穩定性控制策略。采用離線數值優化和非線性規劃方法,只須根據建立的公式進行簡單的計算即可實時確定輪胎縱向合力和橫擺力矩的可實現范圍,并將計算的合力和力矩調整至可實現范圍內,進行動態分配,設計了滑移率和前輪側偏角的控制器,使輪胎摩擦力跟蹤各分力。在合力分配精度滿足工程要求的同時,避免對后輪側向力的估計,簡化了算法,提高了算法的實時性,且算法的適用范圍也擴大到了僅具備前輪主動轉向的四輪獨立制動車輛。基于Matlab/Simulink進行控制系統的構建和仿真分析,最后進行基于LabVIEW PXI和veDYNA的駕駛員在環試驗驗證。
1 3自由度車輛模型
研究目標不同,車輛動力學模型的復雜程度也不同。為方便進行車輛縱向合力與橫擺力矩計算,忽略懸架的作用,采用只包含縱向、側向和橫擺運動的3自由度平面運動模型,即得到車輛縱向合力與橫擺力矩的計算模型,3自由度車輛模型的動力學方程為
(1)
忽略空氣阻力和車輪滾動阻力可得
(2)
式中:vx,vy和γ分別為車輛的縱向速度、側向速度和橫擺角速度;Fx,Fy和Mz分別為車輛的縱向合力、側向合力和橫擺力矩;m為整車質量;Iz為整車繞垂直軸的轉動慣量。
2 車輛橫向穩定性控制系統的設計
假定車輛前輪轉角可主動改變,且四輪獨立制動。首先利用理想車輛模型得到橫擺角速度和縱向加速度的期望值,根據車輛的當前狀態進行所需縱向合力和橫擺力矩的計算;然后根據垂向載荷計算出縱向合力和橫擺力矩的可實現范圍,并按照設計的規則將縱向合力和橫擺力矩調整至可實現范圍內;根據縱向合力、橫擺力矩的估計值與期望值之間的偏差計算輪胎分力,利用建立的輪胎逆模型計算出所需的滑移率和前輪側偏角,并通過滑移率和前輪側偏角控制器對計算的滑移率和前輪側偏角進行跟蹤。
2.1 縱向合力與橫擺力矩線性反饋計算
根據期望的橫擺力矩和縱向加速度,計算所需的縱向合力和橫擺力矩。通過變量代換[1]將式(2)變換成線性形式:
(3)
式中:v1,v2和v3為一組新的輸入。
將式(3)代入式(2)可得
(4)
式(4)描述的線性系統,由于只考慮了車輛的側向運動,縱向車速vx可作為常數,為保證系統穩定并具有良好的性能,采用極點配置方法設計車輛側向運動方程的反饋增益k2,并考慮控制量不能過大,通過仿真試驗可得
閉環極點為(-28 -32)T
得到的縱向合力與橫擺力矩計算模塊框圖如圖2所示。
圖中,k1為理想車輛模型變換矩陣,是與車速有關的時變矩陣[12];B為式(4)中v1,v2,v3的系數矩陣。
2.2 縱向合力與橫擺力矩可實現范圍估計與調整
由于縱向合力與橫擺力矩計算模塊是一個線性反饋,當狀態誤差很大時,縱向合力和橫擺力矩的計算誤差也會很大,導致計算的縱向合力和橫擺力矩甚至無法實現,因而須對計算的縱向合力和橫擺力矩進行調整。首先估計縱向合力和橫擺力矩的可實現范圍,確定橫擺力矩的最大值,然后根據設計的調整規則對縱向合力與橫擺力矩進行調整。
由于輪胎與地面的摩擦力不會超過附著極限,因而縱向、側向合力與橫擺力矩也被限定在某一范圍之內,須要對縱向合力與橫擺力矩的可實現范圍進行估計。若將縱向合力的所有可能分配作為一個集合,則橫擺力矩為定義在該集合上的一個泛函,該泛函的值構成一個集合,且是有界的。由上確界存在公理[13]可知,當縱向合力的值確定時,則橫擺力矩必然存在上確界,若獲得上確界或上確界的近似值,則在縱向合力的值是某一確定值時,可確定橫擺力矩的變化范圍,當縱向合力取不同值,可以得到橫擺力矩的上確界隨縱向合力取值不同而變化的近似曲線,則縱向合力與橫擺力矩的可實現范圍即可確定。
車輛行駛時的縱向合力與橫擺力矩為
(5)
式中:Fxi和Fyi分別為輪胎縱向力和側向力;lF和lR分別為整車質心距前、后軸的距離;dF和dR分別為前、后輪距的1/2。
當對車輛施加橫擺力矩時,路面也對輪胎有相應的附著反力矩作用,稱之為橫擺反力矩,為確定橫擺轉矩上確界的近似值,評價指標選擇橫擺力矩的相反數M:
M=-Mz=cx
(6)
其中:
c=(dF-dFdR-dR-lF-lFlRlR)
x= (x1x2x3x4x5x6x7x8)T=
(FxFLFxFRFxRLFxRRFyFLFyFRFyRLFyRR)T
當縱向力一定時,有如下線性等式約束:
Ex=Fx
(7)
其中E=(1 1 1 1 0 0 0 0)
假定前輪側偏角可由控制器主動控制,后輪側偏角無法主動改變,后輪縱、側向力之間應該滿足摩擦橢圓約束[12],前輪縱、側向力只須在極限摩擦橢圓的限制內即可,而前輪摩擦力也在極限摩擦橢圓的約束之內,即
(8)
式中:i=FL,FR;μ為路面附著系數。
后輪摩擦橢圓的約束形式很復雜,若以μFzi(i=FL,FR)為半長軸,純側偏工況下的側向力(側向力的最大值)為半短軸的橢圓與摩擦橢圓在有效滑移率段相差不大,則可將摩擦橢圓約束近似為一個橢圓方程:
(9)
其中:ai=μFzi
bi=ηiαi
式中:i=RL,RR;ηi為輪胎側偏剛度。
根據上述討論可得描述的非線性規劃問題:
(10)
其中
(11)
式中:i=FL,FR;第1個約束為線性等式約束,即車輛輪胎縱向力約束;第2個約束為非線性等式約束,即車輛后輪摩擦橢圓約束;第3個約束為非線性不等式約束,即車輛前輪摩擦圓約束,規定了x的邊界,如果是左轉向則要求車輛前輪側向力都是非正。由于假定車輛后輪不能轉向,而前輪轉角可以由控制器主動控制,因而前后輪的約束方程不同。
采用Matlab中全局優化函數run中的trust-region-reflective算法,對式(10)的非線性規劃問題求解。在不同的垂向載荷與后輪側偏角下,得到了一簇最大橫擺力矩與縱向合力的關系曲線,可用三段折線近似表示,它就是縱向合力-橫擺力矩的近似可實現范圍,如圖3中范圍e所示。
采用車輛后輪側偏角與4個車輪垂向載荷的線性組合來近似表示折線的4個頂點坐標,即
(12)
其中:
i=A,B,C,D
ξ=(μFzFL,μFzFR,μFzRL,μFzRR,ηRL,αRL,ηRR,αRR)T
式中:cxi和cyi分別為根據最小二乘法由曲線頂點的數據擬合的六維系數行向量。在合理的垂向載荷范圍之內,4個頂點橫坐標最大的相對誤差不超過6%,縱坐標的最大相對誤差不超過4%。
通過優化和數據擬合,得式(12)中的系數:
cxA=(0,0,0,0,0,0)
cyA=(1.43,1.43,0,0,-1.595,-1.595)
cxB=(0,0,0,1,0,0)
cyB=(1.43,1.43,0,0.75,-1.595,0)
cxC=(-0.029,0.4523,1.35,0.68,-0.45,0.38)
cyC=(1.21,1.26,-0.79,0.76,0.23,-0.19)
cxD=(1,1,1,1,0,0)
cyD=(-0.75,0.75,-0.75,0.75,0,0)
當縱向合力與橫擺力矩計算模塊得出的縱向合力和橫擺力矩在圖3中可實現范圍外時,可對縱向合力與橫擺力矩按照以下規則進行調整,將其限制在可實現范圍e內:
范圍a:輪胎縱向合力很小,而橫擺力矩很大,則駕駛主要操作意圖的是進行轉向,要求橫擺力矩保持不變,使縱向合力增大到可實現范圍e的邊界AB;
范圍b:調整縱向合力至可實現范圍e的頂點B;
范圍c:當縱向合力增大時,橫擺力矩的增大很小,則保持縱向合力不變,使橫擺力矩減小到可實現范圍e的邊界BC;
范圍d:縱向合力很大,駕駛主要操作意圖為制動,則保持縱向合力不變,使橫擺力矩減小到可實現范圍e的邊界CD。
2.3 縱向合力與橫擺力矩動態分配
確定縱向合力和橫擺力矩的可實現范圍后,須要將其分解到車輪,根據橫擺力矩誤差進行橫擺力矩的動態分配,即在輪胎縱向合力確定的約束下,通過閉環反饋,使實際的橫擺力矩跟蹤期望值,無須對后輪側向力進行估計。
首先定義橫擺力矩誤差:
(13)
由式(5)可知,縱向力產生的橫擺力矩為
Mx=dF(FxFR-FxFL)+dR(FxRR-FxRL)
(14)
令Mx=k3eM,通過大量的仿真試驗,選擇k3=0.5,縱向力產生附加橫擺力矩以減小橫擺力矩估計值與期望值之間的偏差。考慮到路面附著系數對輪胎縱向合力和橫擺力矩的限制,則可通過求解以下二次規劃問題得到可實現的縱向合力和橫擺力矩,采用拉格朗日乘數法求解二次規劃問題:
(15)
式中i=1,2,3,4分別代表FL,FR,RL,RR。
基于后輪縱向力與側向力之間具有很強的耦合特性,上述方法計算的附加橫擺力矩不能完全消除橫擺力矩估計值與期望值之間的偏差,為了更好地提高橫擺力矩的跟蹤精度,則須對前輪側向力進行主動調整。
由式(5)可知,左前和右前輪側向力產生的橫擺力矩與左右前輪側向力之和相關,記FyF=FyFL+FyFR。FyF的當前值為
FyF(k)=FyF(k-1)+k4eM
(16)
式中k4為橫擺力矩補償系數,通過大量的仿真試驗,選擇k4=0.3。FyF與eM之間的脈沖函數是一個積分傳遞函數,可有效消除系統的穩態誤差。
前輪側向力根據垂向力的大小進行分配:
(17)
2.4 滑移率和前輪側偏角控制器
滑移率和前輪側偏角控制器的作用是根據期望的滑移率和前輪側偏角,得到前輪轉角和前輪制動力矩,保證輪胎力跟蹤各分力。輪胎力的逆模型采用3層BP神經網絡構建,即縱、側向力為輸入,滑移率和側偏角為輸出,隱層含20個神經元。根據滑移率和側偏角最小的原則(由輪胎的非線性特性知,不同的側偏角和滑移率組合可實現相同的側向力和縱向力)來選擇訓練樣本。為簡化問題,可認為縱、側向力與垂向力成正比,只須把某確定垂向力下的網絡構造出,其他垂向力下的網絡則可按比例縮放得到。采用Matlab中的nftool工具,進行離線訓練,訓練后的3層BP神經網絡經過驗證可用來代表輪胎力的逆模型。通過輪胎力逆模型得到期望滑移率和側偏角后,可計算出期望的車輪角速度:
(18)
式中:i=FL,FR,RL,RR;Ri為車輪有效半徑。
(19)
式中:αFL和αFR可由3層BP神經網絡構造的輪胎力逆模型計算得到。
3 仿真計算與分析
分別采用基于合力分配的橫擺力矩控制(簡稱合力分配控制)與滑模變結構橫擺力矩控制[12](簡稱滑模控制)對設計的控制器在Matlab/Simulink中進行對比仿真,并與期望值進行對比分析。車輛仿真模型和輪胎模型分別采用15自由度模型和Magic Formula修正模型[14]。仿真工況為單移線和階躍轉向兩種典型工況,仿真車輛相關參數如表1所示。
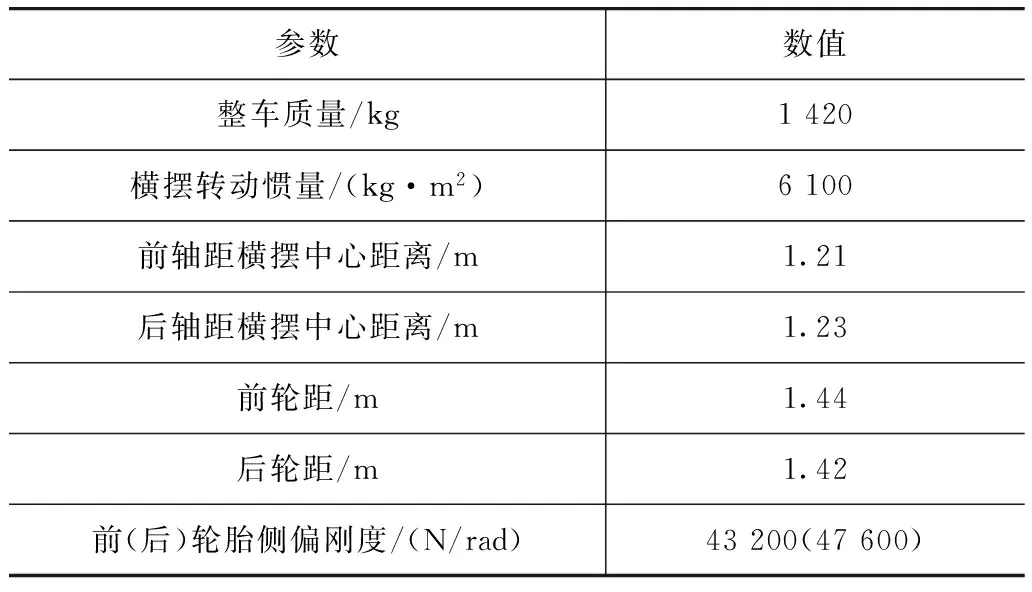
表1 車輛相關參數
3.1 單移線工況
根據GB/T 6323—2014,設定前輪轉角幅值為0.09rad、頻率為0.5Hz的單移線工況,初始車速為80km/h,路面附著系數為0.8,得到車輛橫擺角速度和質心側偏角響應曲線如圖4和圖5所示,相應的峰值對比如表2所示。
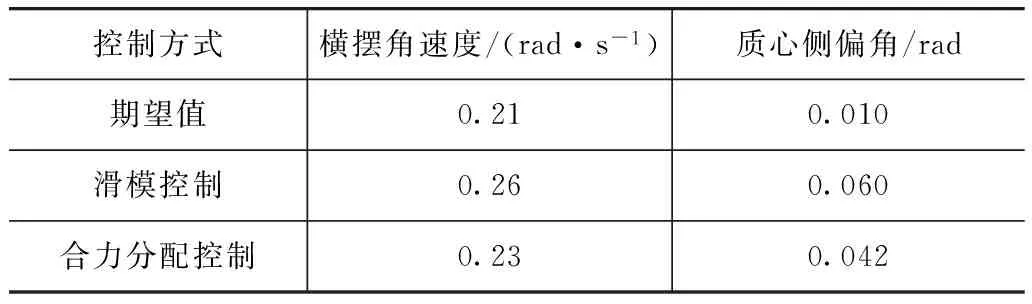
控制方式橫擺角速度/(rad·s-1)質心側偏角/rad期望值0.210.010滑模控制0.260.060合力分配控制0.230.042
由圖4和圖5可知:單移線工況下,采用滑模控制和合力分配控制均能較好地跟蹤橫擺角速度,但采用合力分配控制的超調量較小;與滑模控制相比,采用合力分配控制的車輛質心側偏角被抑制在一個較小的范圍內,提高了車輛的橫向穩定性。
由表2可知,單移線工況下,與滑模控制相比,采用合力分配控制的車輛橫擺角速度峰值減小了11.5%,質心側偏角峰值減小了30%。
3.2 階躍轉向工況
根據GB/T 6323—2014,設定前輪轉角幅值為0.08rad的階躍轉向工況,初始車速為80km/h,路面附著系數為0.8,得到車輛橫擺角速度和質心側偏角響應曲線如圖6和圖7所示,相應的峰值對比如表3所示。
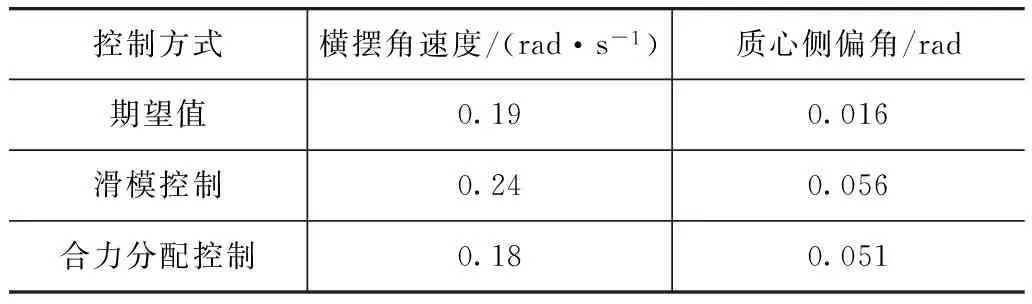
控制方式橫擺角速度/(rad·s-1)質心側偏角/rad期望值0.190.016滑模控制0.240.056合力分配控制0.180.051
由圖6和圖7可知:階躍轉向工況下,采用合力分配控制能較好地跟蹤橫擺角速度,且質心側偏角也保持在可控范圍內,可有效保持車輛穩定性;而采用滑模控制時橫擺角速度和質心側偏角的幅值都較大,特別是質心側偏角大大偏離了期望值,車輛穩定性下降。
由表3可知,階躍轉向工況下,與滑模控制相比,采用合力分配控制的車輛橫擺角速度峰值減小了25%,質心側偏角峰值減小了8.9%。
綜上所述,采用合力分配控制可較好地跟蹤橫擺角速度,提高軌跡保持能力,且質心側偏角被抑制在一個較小的范圍內,可有效避免車輛發生失穩狀況,并大大改善低附著路面上車輛的穩定性。
4 基于LabVIEW與veDYNA的駕駛員在環試驗
為驗證基于合力計算與分配的車輛穩定性控制策略的有效性,考慮到實際試驗條件的限制,采用veDYNA軟件中提供的DYNAanimation動畫工具建立一個虛擬的車輛運行場景,然后由真實的駕駛員對在LabVIEW PXI運行的車輛模型進行操縱,實現“人-車-路”大閉環模擬試驗,降低實車試驗的危險性和成本。
基于LabVIEW PXI和veDYNA建立的駕駛員在環試驗臺和試驗臺顯示界面如圖8和圖9所示。
虛擬試驗場中設置的試驗工況與上述仿真工況一致,即:初始車速為80km/h,路面附著系數為0.8的單移線和階躍轉向工況,分別采用合力分配控制和滑模控制進行對比試驗。
4.1 單移線工況
單移線工況下車輛前輪轉角輸入、橫擺角速度和質心側偏角響應曲線如圖10~圖12所示。
由圖10~圖12可見,單移線工況下,與滑模控制相比,采用合力分配控制可更好地跟蹤車輛,且車輛的質心側偏角和橫擺角速度的幅值都較小,表明車輛的軌跡保持能力得到提高。
4.2 階躍轉向工況
階躍轉向工況下車輛前輪轉角輸入、橫擺角速度和質心側偏角響應曲線如圖13~圖15所示。
由圖13~圖15可見,階躍轉向工況下,車輛的橫擺角速度和質心側偏角得到了一定程度的抑制,與滑模控制相比,采用合力分配控制對車輛姿態的控制效果較好。
試驗結果表明,采用合力分配控制可較好地跟蹤橫擺角速度,提高軌跡保持能力,且質心側偏角被抑制在一個較小的范圍內,有效避免了車輛發生失穩狀況。
5 結論
(1) 提出一種對輪胎縱向合力和橫擺力矩進行實時計算調整和動態分配的車輛橫向穩定性控制策略,采用基于合力計算與分配控制可較好地跟蹤橫擺角速度,提高軌跡保持能力,且質心側偏角被抑制在一個較小的范圍內,可有效避免車輛發生失穩狀況,大大改善了低附著路面上車輛的穩定性。
(2) 基于合力計算與分配控制策略,使橫擺力矩較好地跟蹤期望值,在保證橫向穩定性的同時,車輛具有良好的動態和跟蹤性能,在保證精度的同時,優化了控制算法,且避免了對后輪側向力的估計,算法的適用范圍也擴大到了僅具備前輪主動轉向的四輪獨立制動車輛,實用性大大增強。
[1] Javad Ahmadi,Ali Khaki Sedigh, Mansour Kabganian. Adaptive Vehicle Lateral-plane Motion Control Using Optimal Tire Friction Forces with Saturation Limits Consideration[J]. IEEE Transactions on Vehicular Technology, 2009, 58(8): 4098-4107.
[2] Ali Roshanbin, Mahyar Naraghi. Vehicle Integrated Control-An Adaptive Optimal Approach to Distribution of Tire Forces[C]. IEEE International Conference on Networking, Sensing and Control,2008:885-890.
[3] Mokhiamar O, Abe M. Simultaneous Optimal Distribution of Lateral Tire Forces for the Model Following Control[J]. Journal of Dynamic System, Measurement, and Control,2004,126(4):753-763.
[4] Kim Sang-Ho, Kim Dong-Hyung, et al. A Study on Motion Control of 6WD/6WS Vehicle Using Optimum Tire Force Distribution Method[C]. International Conference on Control,Automation and Systems,2001:1502-1507.
[5] Osamu Nishihara, Himmibu Kumamota. Optimizations of Tire Workload Exploiting Complementarities Between Independent Steering and Traction/Braking Force Distributions[C]. 8th International Symposium on Advanced Vehicle Control, Taipei, China,2006:713-718.
[6] Peng He, Yoichi Hori. Improvement of EV Maneuverability and Safety by Disturbance Observer Based Dynamic Force Distribution[C]. The 22th International BaRery, Hybrid and Fuel Ceil Eleetric Vehicle Symposium & Exposition. Yokohama, Japa,2006:1818-1827.
[7] Eiichi Ono, Yoshikazu Hattori, Yuji Muragishi. Vehicle Dynamics Control Based on Tire Grip Margin[C]. The 7th International Symposium on Advanced Vehicle Control. Anthem, Netherlands,2004:531-536.
[8] 劉力,羅禹貢,李克強.基于動態目標調整的汽車全輪縱向力分配的研究[J].汽車工程,2010,32(1):60-64.
[9] 鄒廣才,羅禹貢,李克強.基于全輪縱向力優化分配的4WD車輛直接橫擺力矩控制[J].農業機械學報,2009,40(5):1-6.
[10] 李道飛,喻凡.基于最優輪胎力分配的車輛動力學集成控制[J].上海交通大學學報,2008,42(6):887-891.
[11] Cho Wanki, Yoon Jangyeol, et al. Estimation of Tire Forces for Applocation to Vehicle Stability Control[J]. IEEE Transactions on Vehicular Technology,2010,59(2):638-649.
[12] Rajesh Rajamani,王國業,江發潮,等.車輛動力學及控制[M].北京:機械工業出版社,2011.
[13] 蘇家鐸,潘杰,等.泛函分析與變分法[M].合肥:中國科學技術大學出版社,2002:7-20.
[14] 夏光.基于電磁閥式減振器的汽車SASS與ESP集成控制研究[D].合肥:合肥工業大學,2013.
A Research on the Lateral Stability Control of Vehicle Basedon the Resultant Force Calculation and Allocation of Tire
Xia Guang1, Tang Xiwen2, Chen Wuwei3, Sun Baoqun1& Zhao Linfeng3
1.InstituteofAutomotiveEngineering,HefeiUniversityofTechnology,Hefei230009;2.RadarConfrontationDepartment,ElectronicEngineeringInstitute,Hefei230037;3.SchoolofMachineryandAutomotiveEngineering,HefeiUniversityofTechnology,Hefei230009
In view of that the calculation and allocation algorithm of tire resultant force is only suitable for the vehicles with four-wheel independent braking and steering, and the achievable range of longitudinal resultant force and yaw moment of tire is limited by road adhesion coefficient, a control strategy for vehicle lateral stability with real-time calculation, adjustment and dynamic allocation of tire’s longitudinal resultant force and yaw moment is proposed. Taking into account the calculation error of linear feedback, offline numerical optimization and nonlinear programming are adopted to determine the achievable range of tire’s longitudinal resultant force and yaw moment, the resultant forces and moments calculated are adjusted into the achievable range and dynamically allocated. The controller for slip ratio and front wheel sideslip angle is designed to make tire friction force track each component force without estimating the side force of rear wheel while ensuring accuracy. Finally a simulation is conducted and verified by a driver-in-the-loop test based on LabVIEW PXI and veDYNA. The results show that the lateral stability control of vehicle based on resultant force calculation and allocation can effectively enhance the track maintenance capability of vehicle, improve vehicle stability on low adhesion road, with a control effect better than that of sliding mode variable structure control.
vehicle; tire’s longitudinal resultant forces; yaw moment; resultant force calculation and allocation; lateral stability control
*國家自然科學基金(51205101)和安徽省十二五科技攻關項目(12010202032)資助。
原稿收到日期為2014年3月6日,修改稿收到日期為2014年7月1日。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40